
これからアマチュア無線の免許を取得し開局を行いWhoopをFPVで飛ばそうとお考えの方の練習機としてEachine E011という機体はコスパが非常に高くよく飛んでくれるのでおすすめだよっと言った事を以前書いたのですが、かなりの方に見て頂きそして購入されているようです。

完全に個人的な意見、私がそもそもこのEachine E011という機体からWhoopをはじめたのでその個人的意見から書いたのですが意外とその反応の多さに驚いています!
これからWhoopをはじめてみようという方が多いということなんでしょうね!
当サイト経由で購入していただいている機体でダントツ人気なのがEachine US65とこのEachine E011です。
自分が大好きな機体で多くの記事を書いてきたのが大きいのだと思いますが、やはりこれからはじめられる方の練習機として1台は持っておきたい機体だと思います。
そして練習機としては最適な機体です。
多くの方に興味を持っていただいているためか、この機体に関するお問い合わせもかなり頂くようになりました。
自分の中ではそこそこご紹介してきたつもりだったのですが、「そこが知りたいのかー」等に気付かされております。
そこで最近レビューしたいものがたまってきているのですが、少し優先して頂いている質問に回答する形で書いております。
そして今回はEachine E011の基本的な操作方法をご紹介しようと思います。
このEachine E011に関しては、はじめて飛ばした機体ということもあり多数の記事を書いてきました。
こちらも参考にしてみて下さい。
ヘッドレスモードやキャリブレーション方法、またTaranis送信機でのバインド方法などお問い合わせの多かったものをご紹介したいと思います。
お問い合わせを頂いて思い出したのですが、はじめてWhoopを野外目視で飛ばした時に機体の状態(向き)が全く分からず操縦が????となり・・・はじめての頃ヘッドレスモードをよく使っていたのを思い出しました。
ある程度飛ばせるようになると必要がなくなってくるかと思いますが、全くはじめてという方にはあると便利ですね!
目次
Eachine E011 付属コントローラーの基本操作方法&Taranis送信機設定方法!
これがEachine E011の付属コントローラーです。
もうかれこれ10個ほど持っています。
なんか懐かしすぎてテンション上がってきました!

Eachine E011の便利な日本語マニュアルもJIZOMAEさんのサイトからダウンロード出来るようですね。
ありがたい!
まずはドローンの基本操作について!
これからはじめられる方が読まれているという前提で少しドローンの基本操作についても書いておきます。
ドローンを飛ばしはじめると、送信機(プロポ)のスティック操作(舵)の名称で、スロットルやエレベーター、エルロン、ラダーなど馴染みのない言葉を耳にするかと思います。
はじめは前後や左右、回転など自分の分かりやすい言葉で呼んでいると思います。
しかし次でご紹介するTaranis送信機など本格的な送信機で設定する際にその正式名称を知らず設定第一歩でつまずいてしまうなんて事があるかと思います。
これからドローンをはじめる方や初心者の方には聞き慣れないドローンの舵の名称、スロットル、エレベーター、エルロン、ラダーの説明を最初に少ししておきます。
ドローン操縦の舵には、上昇・下降(スロットル)、前進・後退(エレベーター)、左移動・右移動(エルロン)、回転(ラダー)の4つがあります。
ここではMode2(左スロットル)の場合で説明していきます。
スロットル
スロットルは、ドローンの上昇と下降を表します。
ここではMode2(左スロットル)で説明しているので、プロポ(送信機)の左スティックを上下させることによりモーターの回転数が変化し上昇・下降させることができます。
エレベーター(ピッチ)
エレベーターは、ドローンの前進・後退を表しています。
ピッチとも呼ばれています。
送信機の右スティックを前後させることによりドローンを前進・後退させます。
また、後退する場合は前部2つのモーターの回転数が上がりドローンが後ろ向きに傾くことにより後退します。
エルロン(ロール)
エルロンは、ドローンの左移動・右移動を表しています。
エレベーターの左右版で、ロールとも呼ばれます。
送信機の右スティックを左右させることによりドローンを左移動・右移動させます。
また右移動する場合は、左側のモーターの回転数が上がりドローンが右に傾き右移動します。
ラダー(ヨー)
ラダーは、ヨーとも呼ばれドローンを回転させます。
送信機の左スティックを左右させることにより左回転・右回転させます。
以上がドローン操作の舵で使用する基本名称となります。
初心者の方にはあまり聞き慣れない名称なのではじめは戸惑うかもしれません。
モーターの回転数を変化させることによりドローンが上記のような舵の動きをしていることを理解できれば、これからのドローン操作の役にも立ちますし送信機の設定ではこの用語がこれから必ず出てくるので必要となります!
付属コントローラーとのバインド!
まずは機体と付属コントローラーとのバインド作業です。
Eachine E011はオートバインドなので簡単です。
付属コントローラーの左スティック(スロットル)を一番下まで下げるとバインドされます。(既に下位置にある場合は一旦スティックを上に上げ再び下げるとバインドされます)

バインドが完了したら実際に飛ばしてみますが、基本操作は上記説明の通りです。
ここでは各モードについて見ていきたいと思います。
ヘッドレスモードの設定!
まずは、ご質問が多かったヘッドレスモードに関してです。
私も野外目視で飛ばしはじめた頃はよくこのモード使っていました!
補助的な使い方がいいかと思います。
室内から少し広い野外で飛ばしはじめると機体が離れていくとその機体の状態(前後左右)が分からなくなり、初心者の方はかなり???状態になるかと思います。
そんな時に便利なのがヘッドレスモードです。
もう一度押し込むと解除できます。
現在の機体の状態に関係なくヘッドレスモードを発動させると自分(送信機から見て)と機体との直線上が『前』となり操縦がしやすくなります。
本来ラダーで機体を回転させて自分から見て機体を前向きにさせてあげますが、なかなかはじめて飛ばされる方には難しい作業です。
機体の向きに関係なくヘッドレスモードを入れることにより現在の機体の向き(送信機から見て)が前向きとなるので操作しやすくなります。
ワンキーリターン!
次にワンキーリターンという機能です。
上記ヘッドレスモード起動中に後退(右スティックを下まで下げる)とワンキーリターン機能の発動です。(”ピッピッピッ・・・”)
名前から分かるように自分の位置まで戻ってくるという機能なんですが、あまり精度がよくないので私は使った事がないです。
そもそもGPSなどセンサーが付いていない機体ですからね。
参考程度とお考え下さい。
あと少しマニュアルと相違点があります。
ワンキーリターン状態で「前進」レバーを入れると解除と書かれているのですが、解除後もブザーが常になっている状態となります。(解除されているか?な状態!)
私が当時使っていた方法は、完全にワンキーリターンは使わないので無視して・・・
飛行中に左スティックを押し込むことによりヘッドレスモードに入り右スティックを操作するとブザーが鳴り出す。
ヘッドレスモードを解除するためにもう一度左スティックを押し込むという使い方をしていました。
おそらくこの使い方が正解だと思いますが、ヘッドレスモード中は常にブザーが鳴っているので付属コントローラーを分解して中のブザーを取り外して飛ばしていました!
キャリブレーション!
衝突などにより機体の挙動がおかしくなった場合(斜めに飛んだりする)、機体のキャリブレーションを行い修正することができます。
機体を水平な場所に起き左右スティックを同時に斜め右まで下げるとキャリブレーションを行うことができます。

フリップモード!
次にフリップモード(機体をクルッと回転させる)です。
飛行中に右スティックを押し込むとフリップモードに入ります。(モード中はコントローラーからはピッピッピ・・・とブザーがなります)
フリップモード中にピッチやロールの操作をさせると機体をその向きに回転(フリップ)させる事が出来ます。
本来ドローンでこのような動きをさせるにはAcro(アクロモード)での操作でやりますが、ドローンがこういう動きも出来るということを知るのにいいかもしれませんね!
楽しいです!
私の場合、フリップモードで自動的に出来る綺麗なフリップを決めれるようになるまで随分と時間がかかりましたが・・・
以上、Eachine E011を付属コントローラーで飛行させるための基本操作となります。
Taranis送信機設定方法!

こちらも問い合わせの多い項目です。
上記付属コントローラーでの操作に限界を感じてきたら本格的な送信機の導入も視野に入ってくるかと思います。
開局が完了するまではゴーグルによるFPV飛行はまだ出来ない段階なので、私もそうでしたがまずゴーグルよりも先に送信機の購入を検討されるかと思います。
はじめての送信機やゴーグル選びは非常に迷われるかと思います。
これから購入をご検討されている方はこちらも参考にしてみてください。

私が現在愛用している送信機はTaranis Q X7SとTaranis X9 Lite Proとなります。

国内での技適取得が完了し合法的に使えるTaranis X9 Lite Pro。
こちらは「D16」及び最新プロトコル「Access」の2つに対応していますが、Eachine E011のBayangプロトコルでは使えません。

そして今回私の環境でE011を飛ばす事ができるマルチプロトコル技適モジュールを導入したTaranis Q X7Sでご説明していきます。
![]()

Eachine E011で使われているプロトコルはBayangプロトコルとなります。
付属コントローラーから本格的な送信機を使うという事でここでは基本的な設定のみとしておきます。(上記ヘッドレスモードやフリップモード等の設定もできますが、ここまで来るとおそらく使う事はないかと思います。)
今回こちらではマルチプロトコルモジュールを搭載したTaranis送信機で説明していきます。
Taranis送信機にはファームウェアにOpenTXが使われています。
OpenTXに関してはこちらの記事も参考にしてみて下さい。

またEachine E011は非常に優秀な機体で、FC内蔵のファームウェアをSilverwereに書き換えることによりAcro(アクロ)モードでの飛行も可能となります。

開局後FPVでの飛行を開始されるかと思いますが、それまでに目視アクロの練習も出来るのでいいかと思います。
Taranis送信機とEachine E011のバインド作業!
まずは機体とのバインド作業です。
上記OpenTXの記事を読んで頂けば設定は簡単です!
ここではマルチプロトコルモジュールを搭載したTaranis Q X7Sで話を進めていきますが、同様にマルチプロトコル対応のJumper送信機などでも同様の作業でできるかと思います。
OpenTX送信機の【SETUP】画面で、[Internal RF]をOFF。
[External RF]でMULT、プロトコルにBayangを選択。
さらに[Subtype]もBayangに設定すればバインドすることができます。

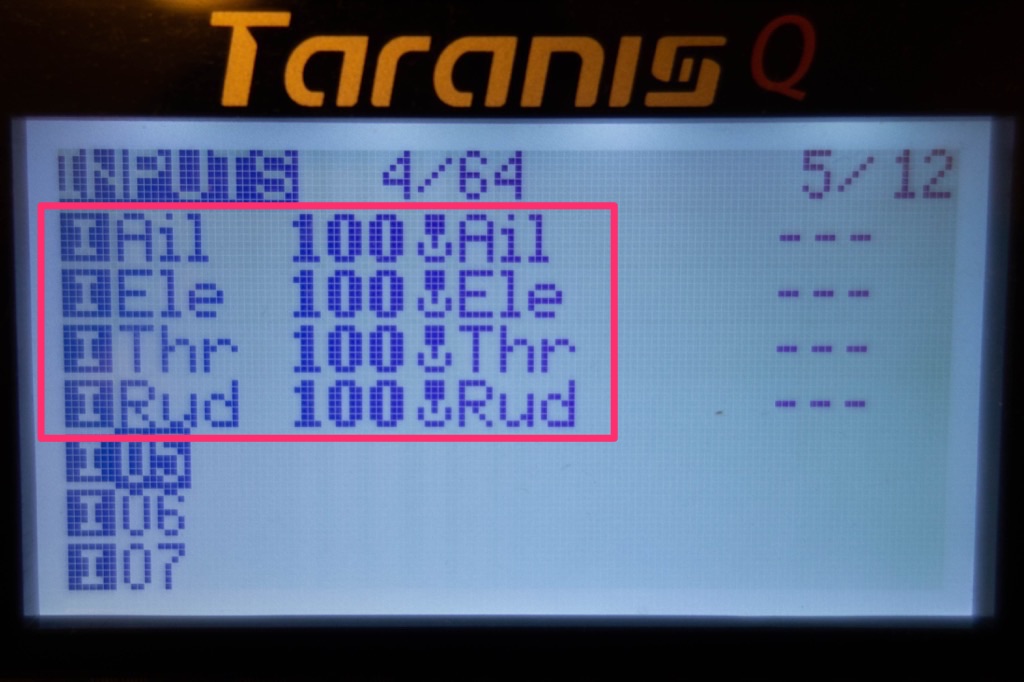
次に【INPUT】【MIXER】を次の順で設定。
CH1から順にエルロン・エレベーター・スロットル・ラダーの順です。

これでTaranis送信機で問題なくEachine E011を飛ばせるようになります。
スロットルカーブを調整すれば飛ばしやすくなります!
上記方法でE011とTaranis送信機のバインド作業が完了し飛ばせるようになりました。
ここで少しスロットルカーブを調整してやればE011が非常に飛ばしやすくなります。
E011を付属コントローラーである程度飛ばされていると感じると思いますが、機体が下降している(自由落下)状態でスロットルを入れると浮き上がるのですが、スロットルカーブが直線だと少しリカバリがし難く、浮き上がる前に床や地面に落ちてしまう・・・なんて事があると思います。
そこで少しスロットルカーブを調整してやると(立ち上がりを少し高くしてやる)先ほどのリカバリがスムーズに出来て飛ばしやすくなります。
デフォルトの状態ではスロットルカーブは直線となっています。
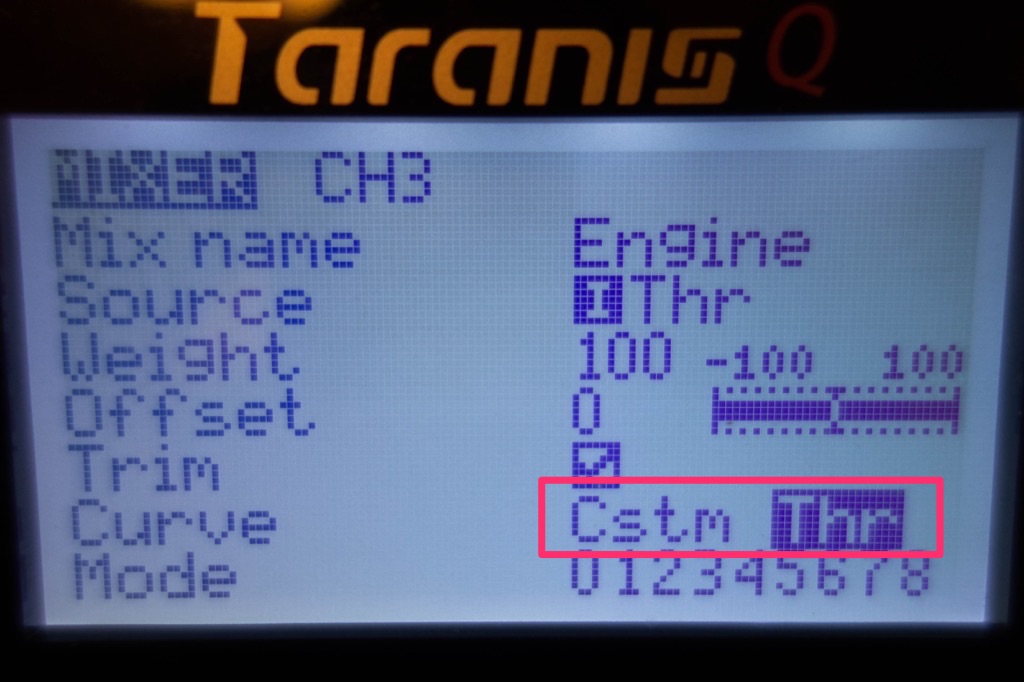
そこで【CURVES】のページでこのように立ち上がり部分を少し高く持ち上げたカーブを作ってあげます。(名前はThrとしています)

そして先程の【MIXER】のスロットルにこのカーブを適用します。
これで驚くほどE011が飛ばしやすくなります!
付属コントローラーでの飛行では限度があるので、ある程度飛ばせるようになると本格的な送信機の導入によりこのように調整ができさらに飛ばしやすくなります。
まとめ!
こんな感じで数回に分けて初心者練習機としてEachine E011をご紹介してきました。
何度壊しても簡単に修理ができ、またコスパもいいのでこれからはじめられる方の練習機として最適かと思います。
そしてSilverwereの導入により早い段階で目視アクロの練習なんかも出来ます。
開局が完了するまでには、はじめてだと2ヶ月ほどかかると思います。
この長い期間で目視飛行の練習や送信機の設定等覚えていけば、開局後ゴーグルを使ってのFPV飛行に比較的容易に移行出来るかと思います。
そしてE011の練習にも慣れもう少し機体性能が高いものを飛ばしたくなってくるかと思います。
ここまで来ると後はいろんな機体を飛ばして練習あるのみなんですが、1セルブラシレス Whoopの代表機とも言えるEachine US65なんかが非常にオススメです。

私もFPVでWhoopを飛ばすようになり1年ほどが経ちましたが、既に4機目となります。
非常にオススメな機体でこのサイトでも多く取り上げ記事を書いてきました。
こちらも参考にしてみて下さい!

 【これからはじめるTinyWhoop】1セルバッテリー、まずは入手しやすいものからはじめるのがいいのかな!
【これからはじめるTinyWhoop】1セルバッテリー、まずは入手しやすいものからはじめるのがいいのかな!  BETAFPVのセットではじめるTinyWhoop!こんな組み合わせでWhoopをはじめてみるってのはどうでしょうか? 【LiteRadio 2 Radio Transmitter / VR01 FPV Goggles / Beta65S Lite】
BETAFPVのセットではじめるTinyWhoop!こんな組み合わせでWhoopをはじめてみるってのはどうでしょうか? 【LiteRadio 2 Radio Transmitter / VR01 FPV Goggles / Beta65S Lite】  【これからはじめるTinyWhoop】Makerfire Armor65 LiteではじめるTinyWhoopをちょっと考えてみました!
【これからはじめるTinyWhoop】Makerfire Armor65 LiteではじめるTinyWhoopをちょっと考えてみました!  【TinyWhoop開局申請】開局申請に必要な系統図、どこから入手しているの?
【TinyWhoop開局申請】開局申請に必要な系統図、どこから入手しているの?  【これからはじめるTiny Whoop③】はじめてのゴーグル&送信機選びは?ブラシレスWhoopにも挑戦してみよう!
【これからはじめるTiny Whoop③】はじめてのゴーグル&送信機選びは?ブラシレスWhoopにも挑戦してみよう!  【これからはじめるTiny Whoop②】はじめての練習機は何がいいの?Eachine US65?いや、Eachine E011一択でしょ!?
【これからはじめるTiny Whoop②】はじめての練習機は何がいいの?Eachine US65?いや、Eachine E011一択でしょ!?  【これからはじめるTiny Whoop①】いったい何からはじめたらいいの?
【これからはじめるTiny Whoop①】いったい何からはじめたらいいの?  ノイズが入りまくりのFPV用カメラ。5.8GHzアンテナの交換で画像がウソのように鮮明に回復!
ノイズが入りまくりのFPV用カメラ。5.8GHzアンテナの交換で画像がウソのように鮮明に回復!  FPV初心者練習機として最適!Eachine E011でFPV練習機を作る!
FPV初心者練習機として最適!Eachine E011でFPV練習機を作る!  FPVカメラがむき出しだった練習機。保護カバーを付けて完全ガード!【Tiny Whoop】
FPVカメラがむき出しだった練習機。保護カバーを付けて完全ガード!【Tiny Whoop】  サンタが乗ったトイドローンEachine E011を購入!可愛い見た目とは裏腹に7mmモーターでキビキビ飛んでくれます!
サンタが乗ったトイドローンEachine E011を購入!可愛い見た目とは裏腹に7mmモーターでキビキビ飛んでくれます!  Eachine E011は716モーターフープの部品取りに最適!!
Eachine E011は716モーターフープの部品取りに最適!!  【Tiny Whoop】Eachine E011C Flying Santa Clausをacro(アクロ)化する手順【silver13/BoldClash-BWHOOP-B-03】
【Tiny Whoop】Eachine E011C Flying Santa Clausをacro(アクロ)化する手順【silver13/BoldClash-BWHOOP-B-03】  【Tiny Whoop】結束バンド(インシュロック)を使った簡単カメラガードの作り方!
【Tiny Whoop】結束バンド(インシュロック)を使った簡単カメラガードの作り方!  Eachine E010やE011でステック型バッテリーを使うためのプチ改造!【Tiny Whoop】
Eachine E010やE011でステック型バッテリーを使うためのプチ改造!【Tiny Whoop】 

コメントを残す