最近話題のToothpick、みなさんもう飛ばされていますか?
Whoopで使われているFCをToothpick(爪楊枝)と呼ばれるアームの細い軽量なフレームに載せた新しいタイプの機体のことを言いますが、Whoopとさほど差がない機体重量にもかかわらず、ペラガードが無いため大径のペラを取り付けることができるため機動力が大幅に上がり、また飛行時間も延びます。
私も初のToothpickとして『Happymodel Sailfly-X』や『Eachine RedDevil』を飛ばすようになりました。


初飛行の時はWhoopの感覚で飛ばすとぶっ飛んで行き、その飛びに圧倒されました!
Whoopの飛びとは全く別物で、また野外機ということで標準の構成では少し心もとなくSailfly-Xの方は200mW出力VTXと外部受信機を増設しました。


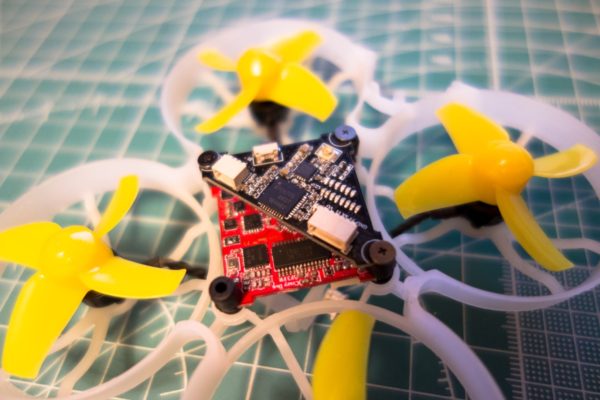
このEachine RedDevilには標準で200mW出力VTXが搭載されているので、今回新たに外部受信機(Frsky xm+)の増設とロスト防止用ブザーの取り付けをやってみました。
Sailfly-Xの時もそうでしたが、増設するためのスペースがなかりシビアとなってきます。
目次
【Eachine RedDevil】外部受信機(Frsky xm+)増設&ブザーの設置!
まずはブザーの設置をやっていきます。
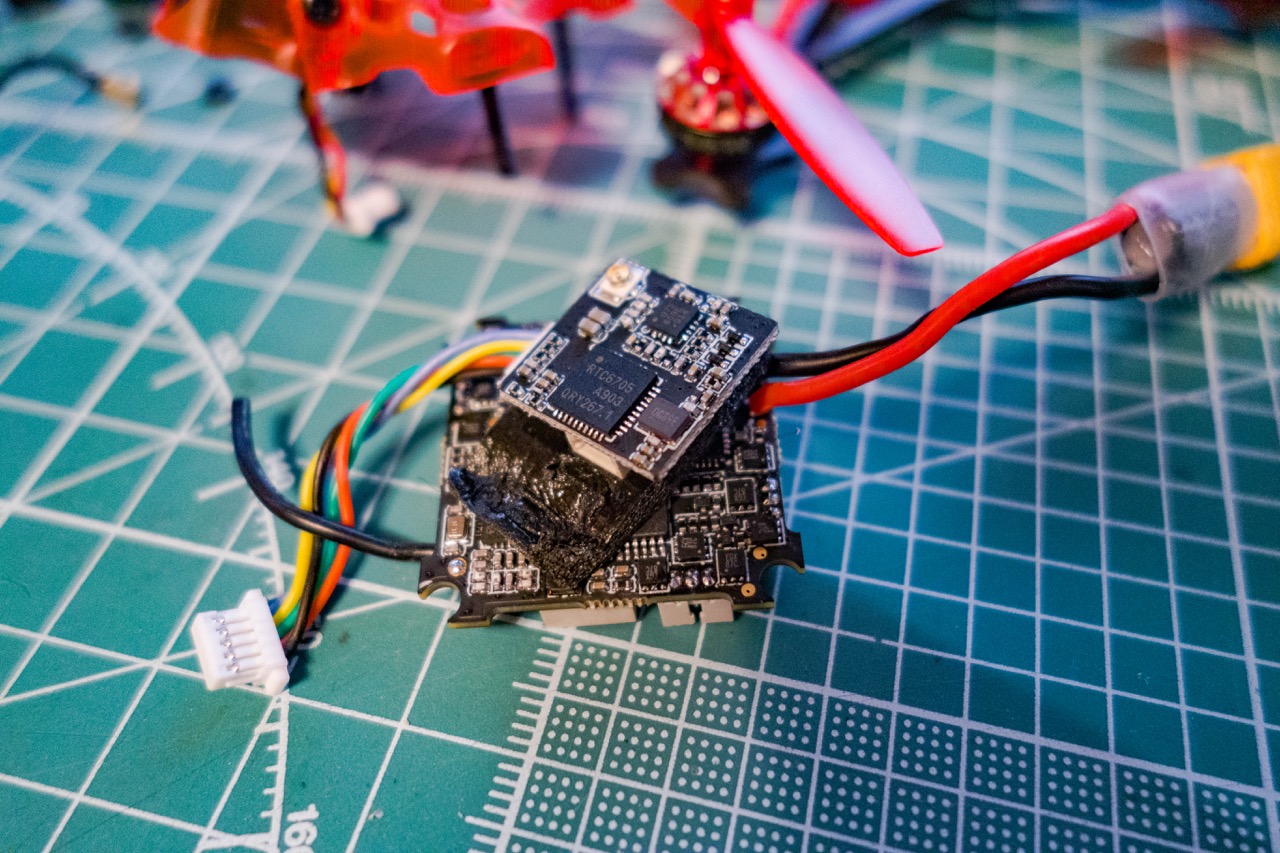
ブザーの設置!
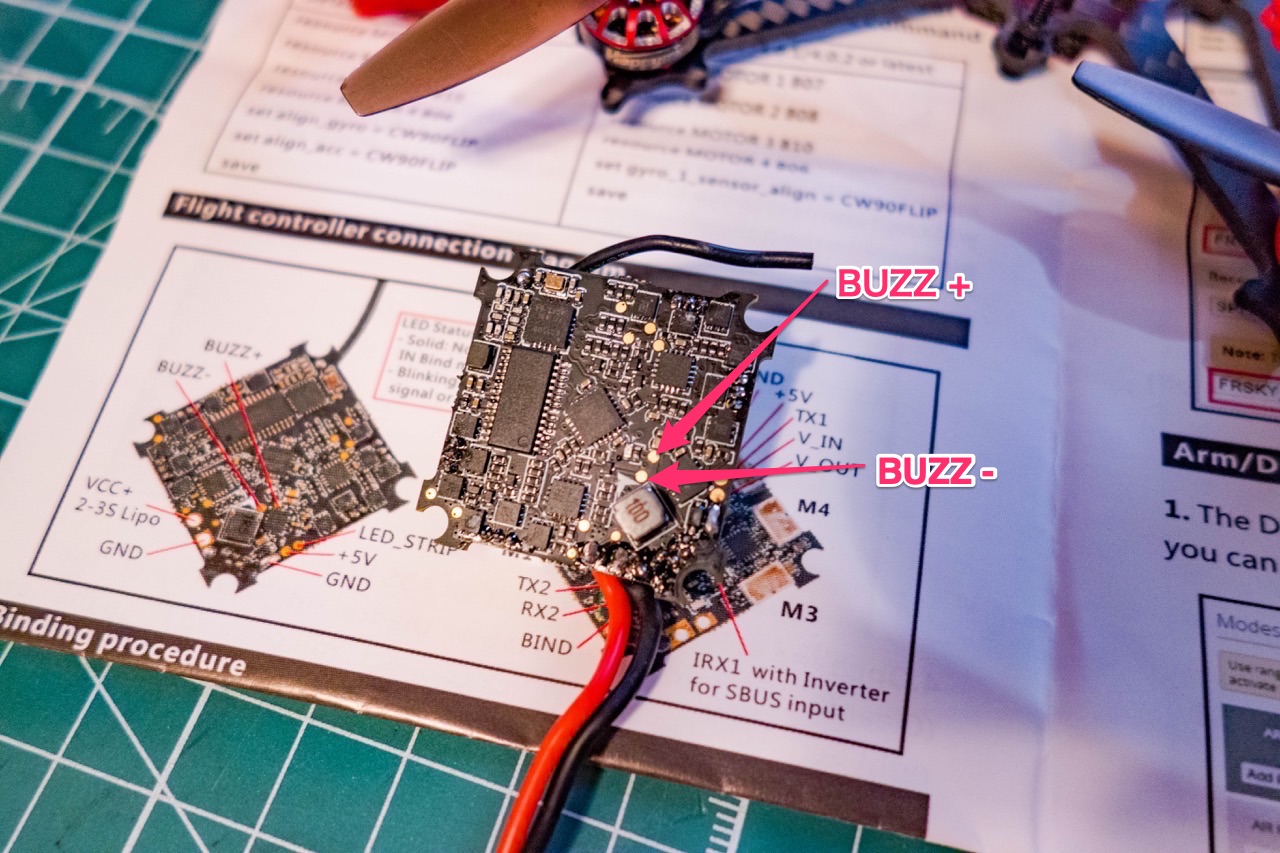
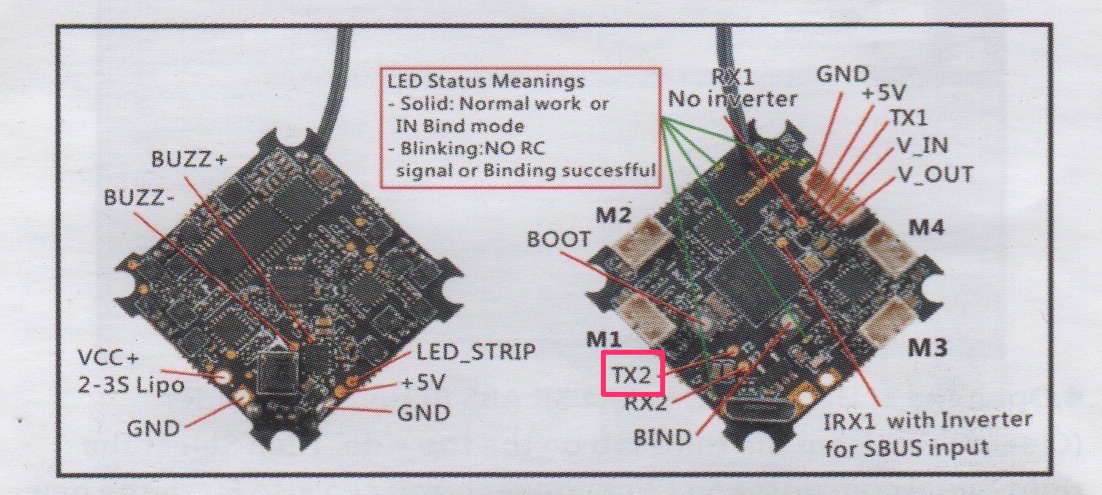
付属のマニュアルを参考にブザーポートを見つけて下さい。
ピッチが狭く他の部品が隣接しており少し難易度が高いかと思います。
使われているFCはSailfly-Xと同じなので、こちらでも詳しく解説してるので参考にしてみて下さい。
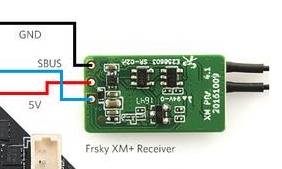
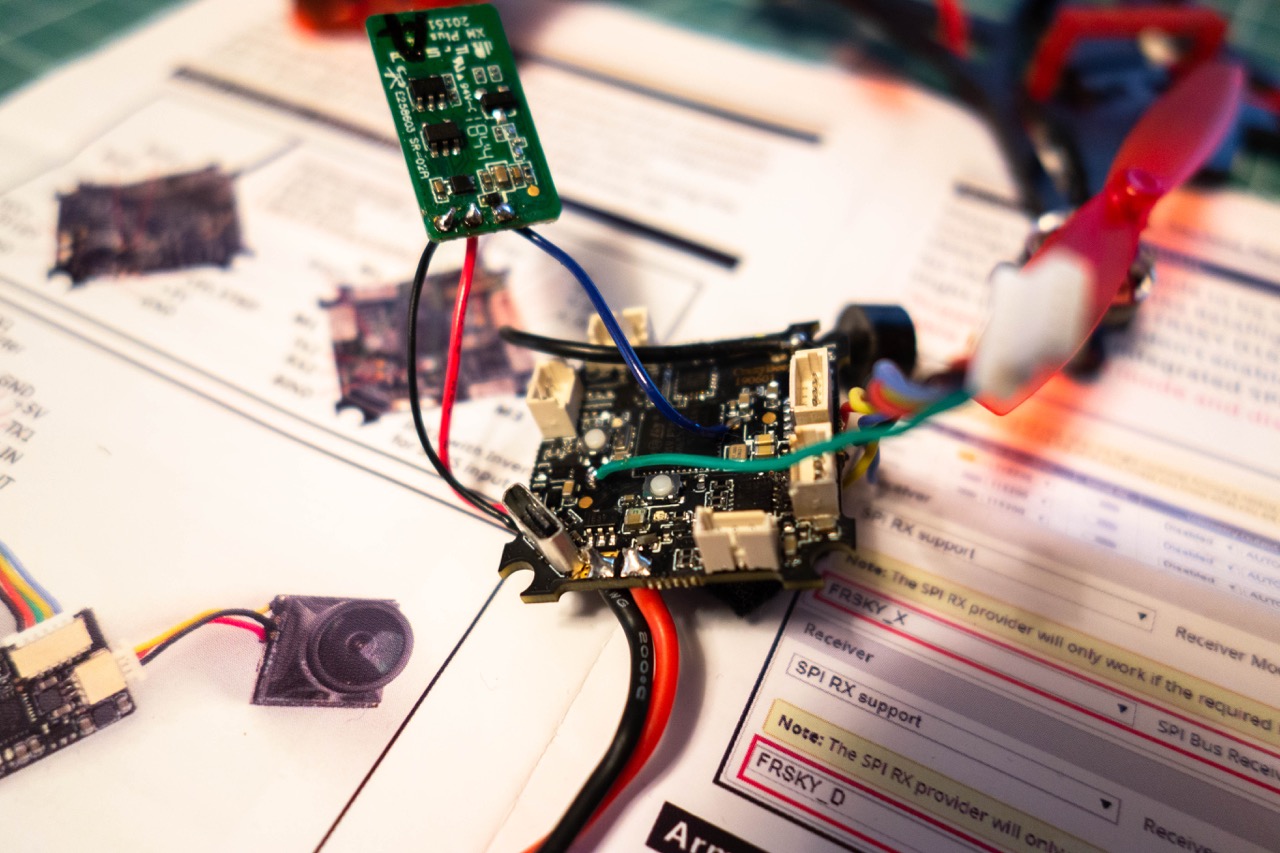
受信機(Frsky xm+)の取り付け!
次に受信機(Frsky xm+)の取り付けです。
使われているFCはSailfly-Xと同じで手順に関してはこちらで詳しく解説していますので参考にしてみて下さい!
付属のマニュアルからFCのポートを確認すると、IRX1 with Inverter for SBUS input(SBUS反転入力)ポートがあるのが確認出来ると思います。
外部受信機のSBUS入力はこのポートに接続する必要があります。
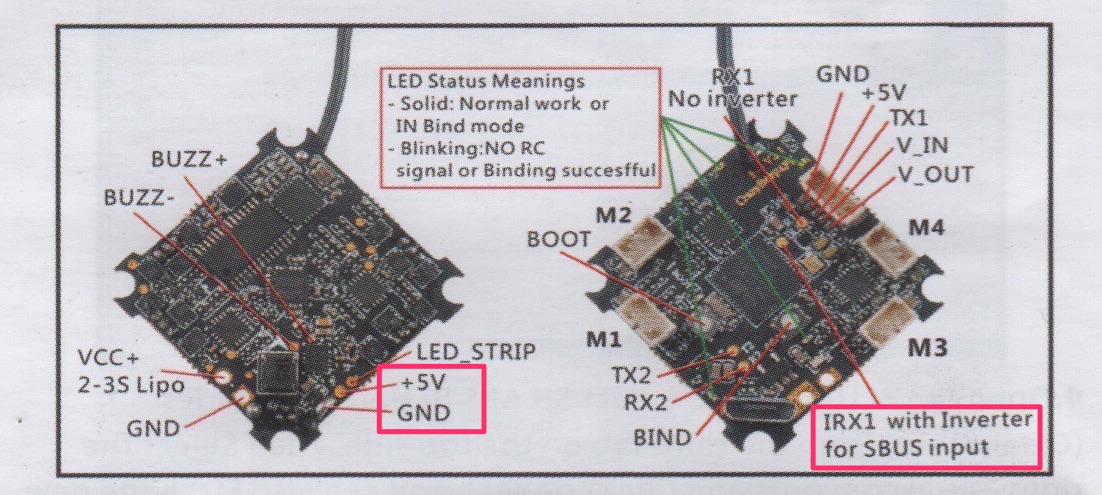
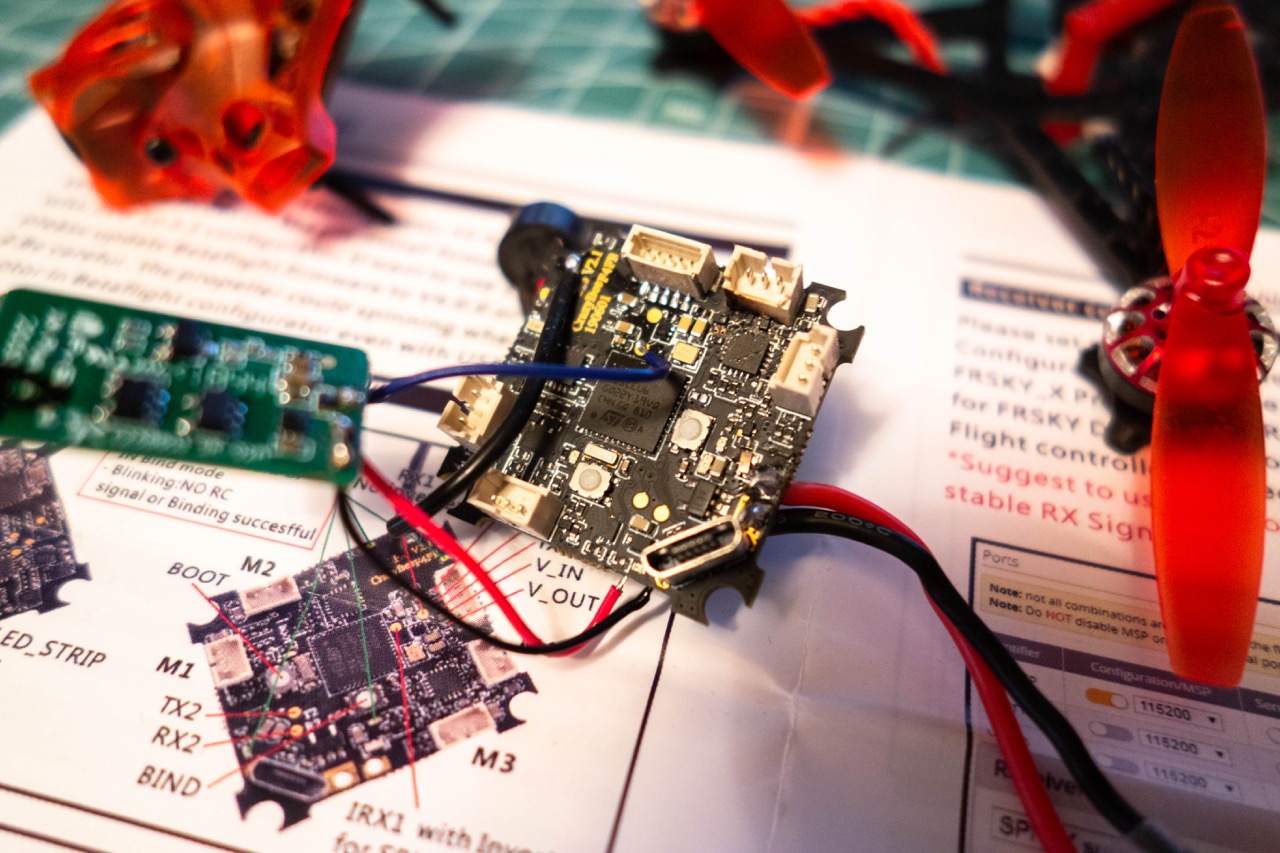
そして電源は、LED_STRIPの電源が空いているのでこちらを使うことにします。
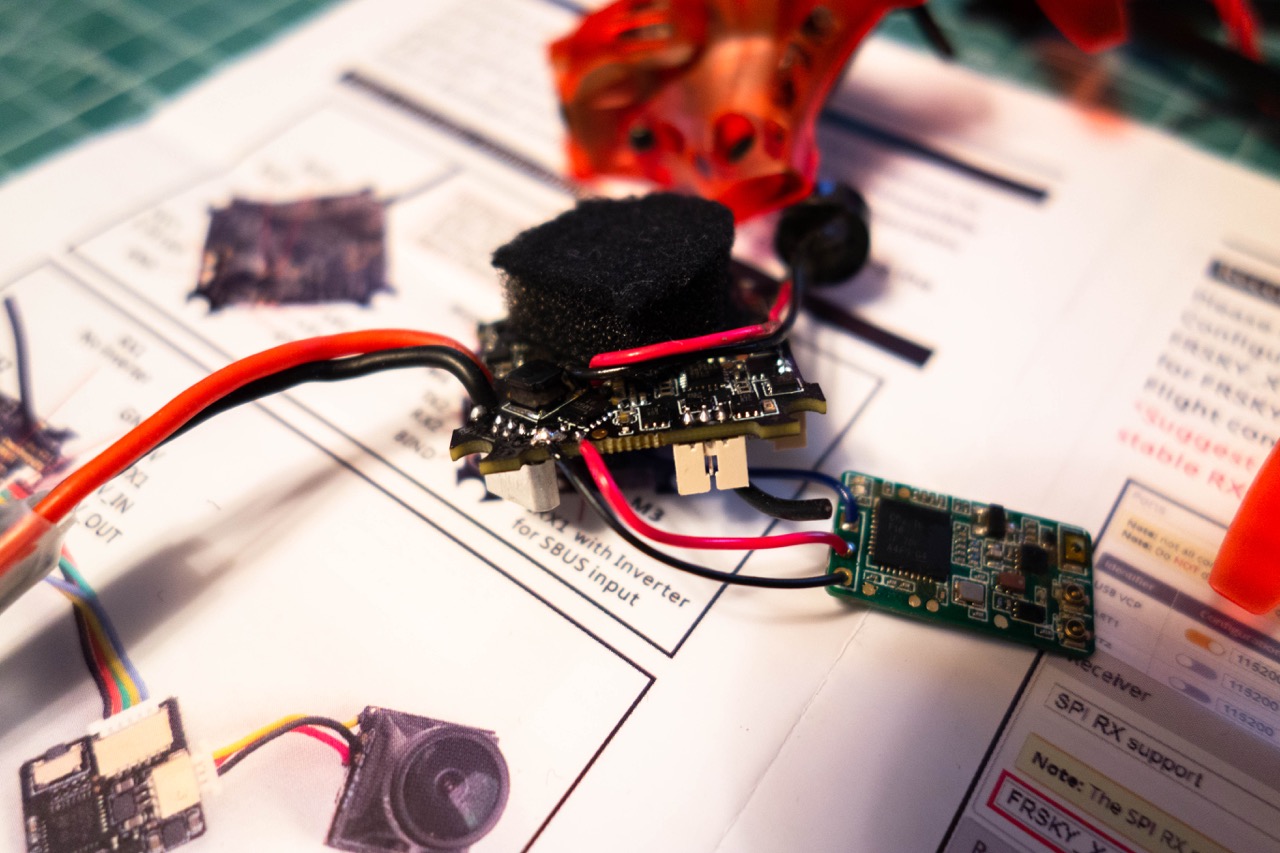
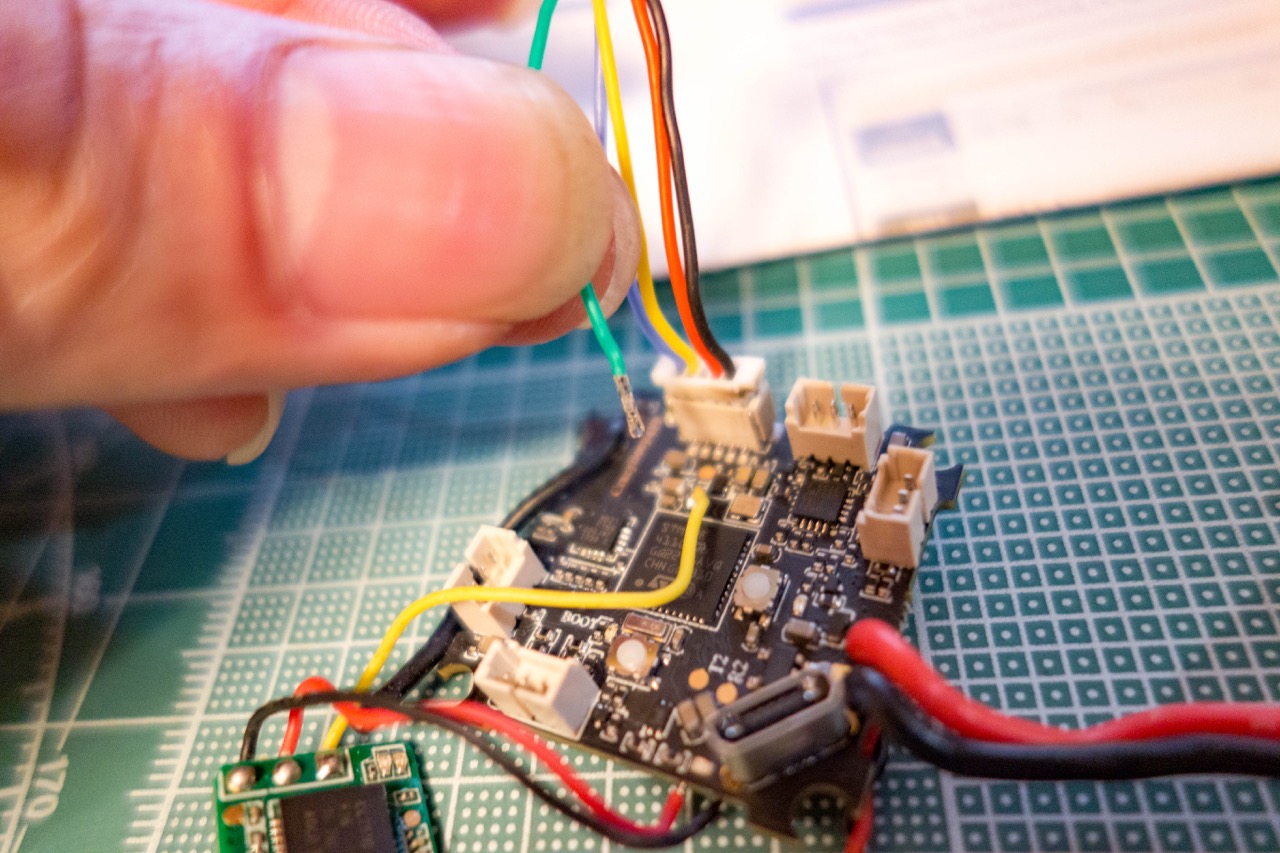
そしてプラグからSmart Audio端子(緑ケーブル)だけを抜き取り、TX2ポートにはんだ付けします。
Betaflightの設定変更!
接続が完了したら組み直す前にまずBetaflightの設定変更を行い動作確認をしておきましょう。
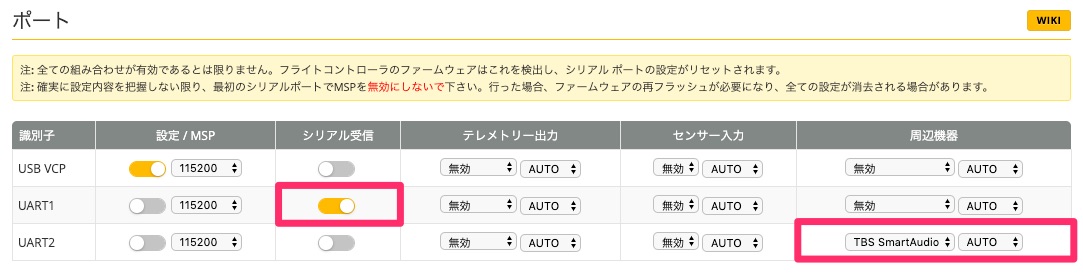
【ポート】タブからUART1のシリアル受信をオンにし、UART2の周辺機器にTBS Smart Audioを設定します。
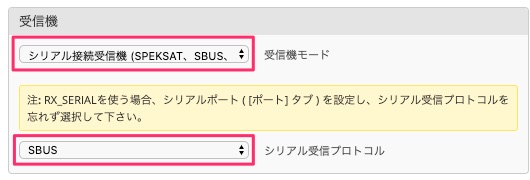
保存後、【基本設定】タブの[受信機]項目にシリアル接続受信機(SPEKSAT,SBUS,SUMD)を選択し、シリアル受信プロトコルに[SBUS]を選択して完了です。
バインドが完了したら【受信機】タブのRSSIチャンネルの設定もお忘れなく!

機体を組み直す!
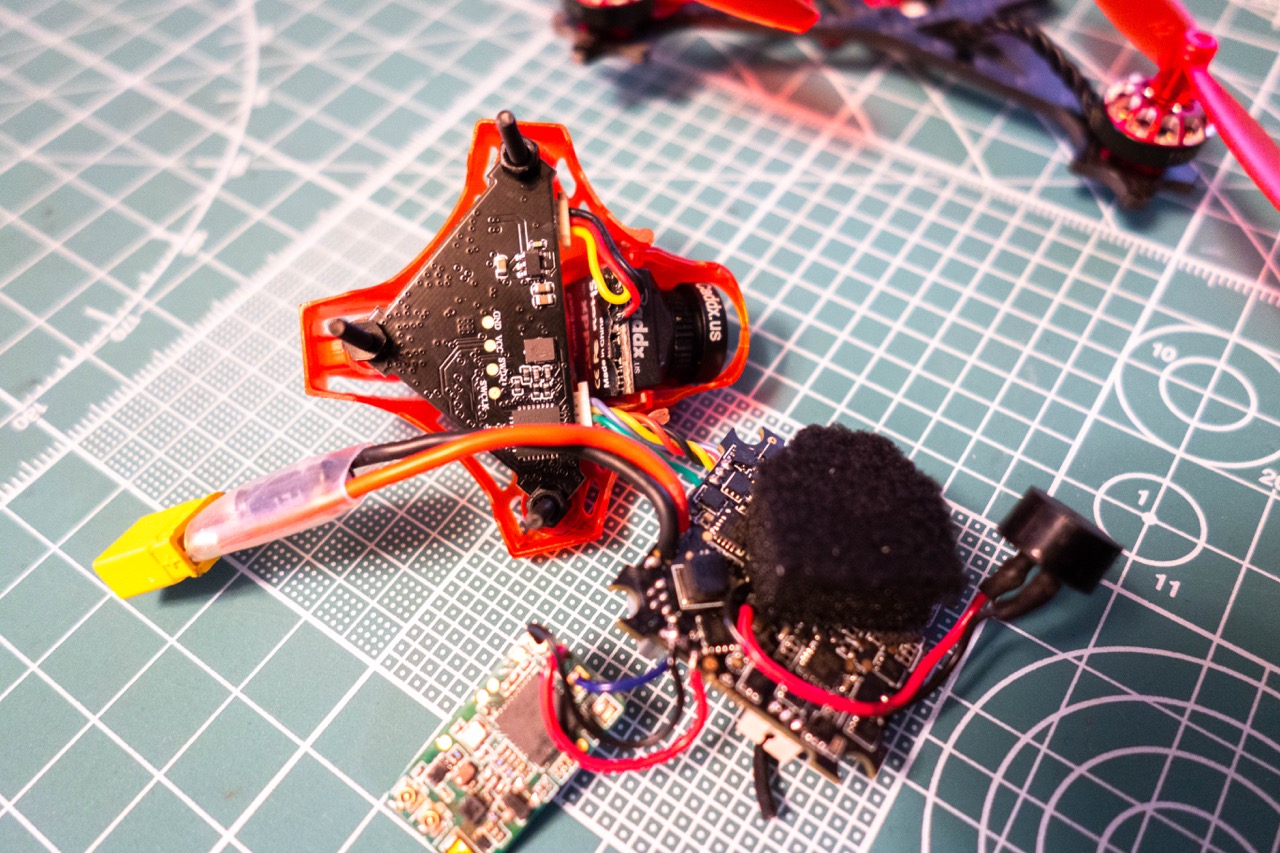
ブザーと外部受信機の接続が完了しBetaflightの設定変更によりバインドや動作確認ができたら機体を組み直していきます。
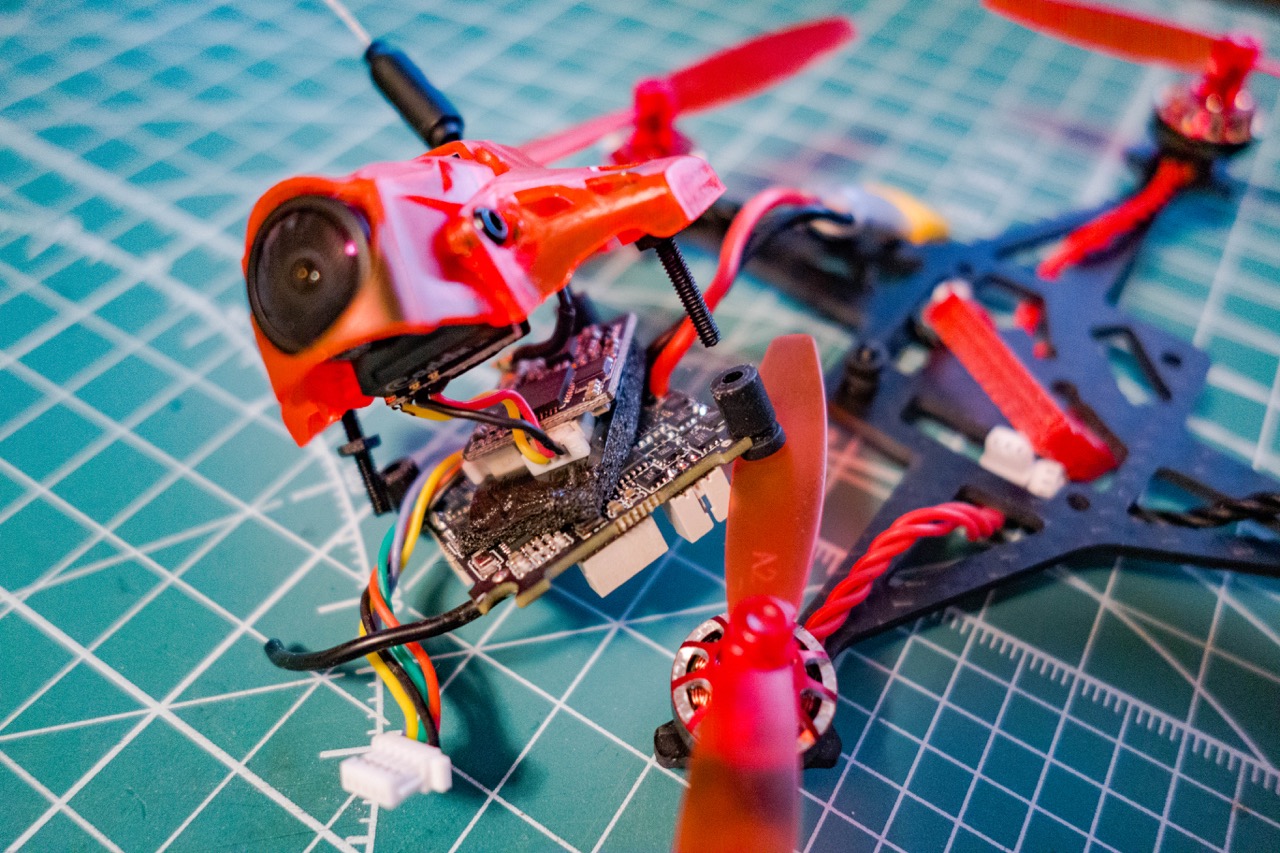
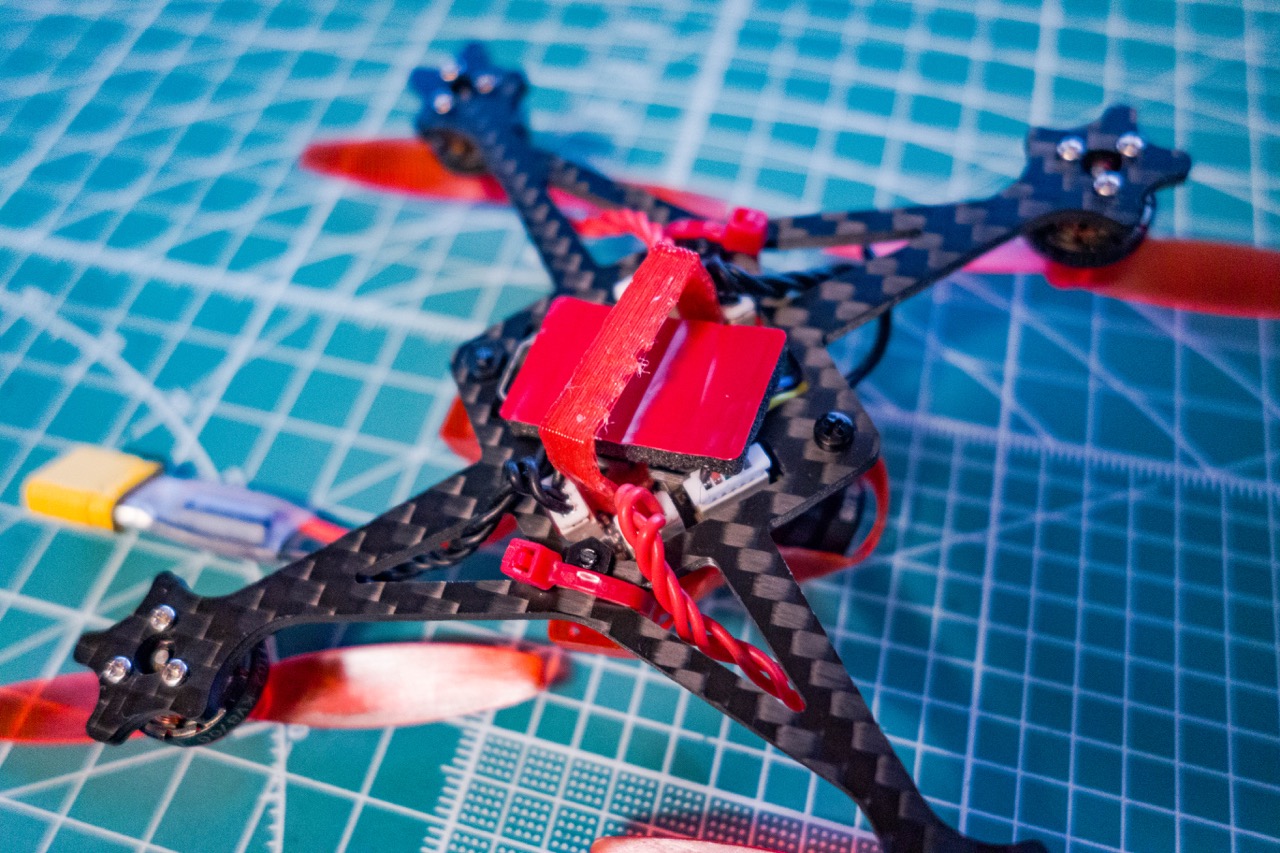
ここで取り付けたFrsky xm+レシーバーの配置なんですが、かなりシビアになりますがキャノピー内に収める事は可能です。
しかしFC・VTX・レシーバーとかなりキャノピー内が密接状態になります!
特に問題はないと思うのですが・・・熱の問題も多少気にはなります。
標準の状態でFC上に両面テープで固定されていた新しいNano VTXもあまりよろしくなさそうな気もします。
このあたり少し気になりますので、機体のカスタマイズをしてみたいと思います。
まず標準の状態でRedDevilの気になる所を挙げてみます。
改善点① プラグ部分の耐久性が気になる!
バッテリーを装着時、クッションがありますがプラグ部分にテンションがかなりかかることからこの部分の耐久性が気になります!
これはdrone4さんもおっしゃっていて、できれば改善した方が良さそうですね!
バッテリーの抜き差しをやっていくにつれ多分、プラグ部分が断線しそうです。
改善点② ペラの写り込みが気になる!
Sailfly-Xと比べるとキャノピーの高さが少し低いので結構ペラが映り込む感じがしました。
40度ぐらいまで上げると写り込みは無くなりますが、FCとEOS2カメラ底面がほぼ接地した状態になります。
一応クッションが付いていますが激突時、FCにかなり力が加わってしまいそうで心配です。
また2セルバッテリーでカメラ角度を下げてまったり練習したいという方もいるかと思います。(今の私です!)
30度ぐらいまで下げてしまうとかなりペラが写り込んでしまいます。
改善点③ 外部受信機の設置場所
先にも述べましたが増設したレシーバーをキャノピー内に収めることも可能ですが(かなりキツキツ状態!)熱の問題も気になります。
以上3点を踏まえて今回少しカスタマイズしてみることにしました。
現時点でのカスタマイズなので今後いろいろ変更するかもしれませんが、カスタマイズの一例として参考にしていただければと思います。
まずは、いきなりですがVTXを変更しました。
標準のNano VTXは200mW出力が可能にもかかわらず非常に小型なので現在Sailfly-Xのカスタマイズに使用しもう一つ注文中です。
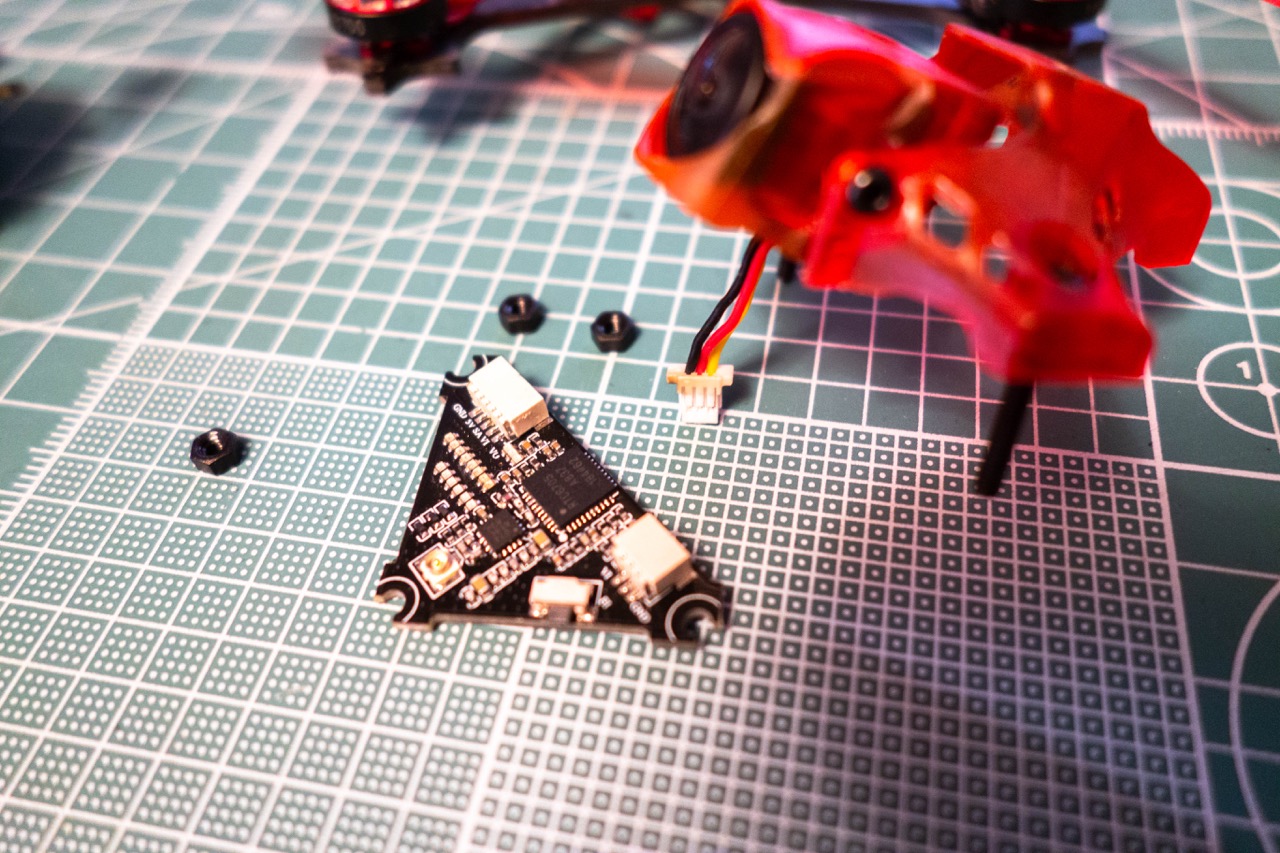
そこでみなさん大好き?三角形のWhoop_VTXを使いました。
TRASHCANやUR85などで使われているVTXです。
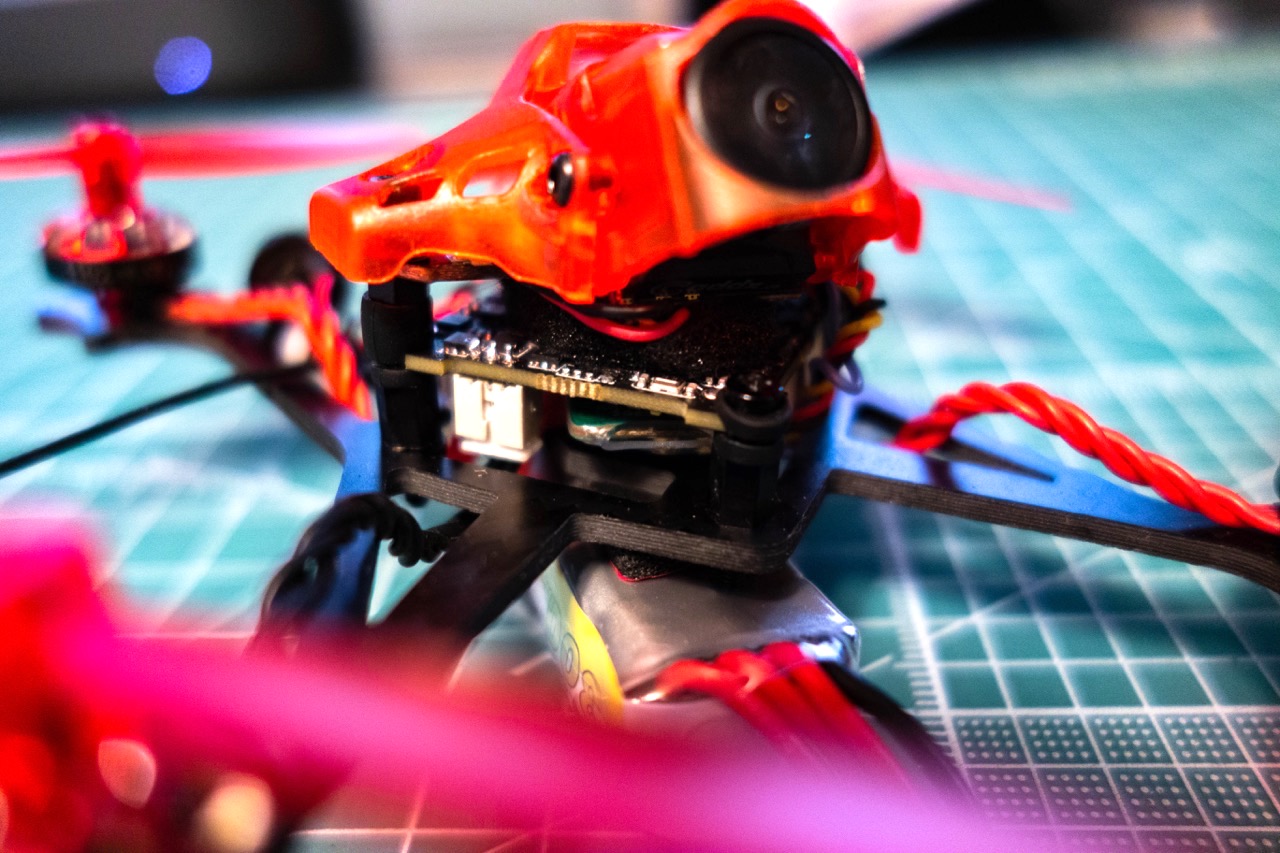
実はこのVTXを使ったのは、キャノピーとFCの隙間をこのVTXの基盤の厚さ分(M2ナットとプラスして1.5mm 程ですが)かさ上げしたかったからです。
このかさ上げが非常に重要で、これでEOS2カメラをFCに接触することなく自由に動かせるようになります。
そしてキャノピー側から組んでいきますが、一度仮組みをしてみて付属のM2×18mmのネジでは後で説明するFC部分のかさ上げにより強度的に弱くなる(プラネジなので結構グラグラ)ので、M2×16mmの金属製のネジに変更しました。
まずはキャノピー3カ所にこの16mmネジを差し込みM2ナットで固定します。

そしてWhoop_VTXをはめ込みさらにM2ナットで固定します。
このM2ナットとVTXの基盤の厚さ分、デフォルト状態よりもFCとEOS2カメラの隙間が開きます。
標準のNano VTX使用の場合は、M2ナット2枚入れてあげれば問題ないかと思います。
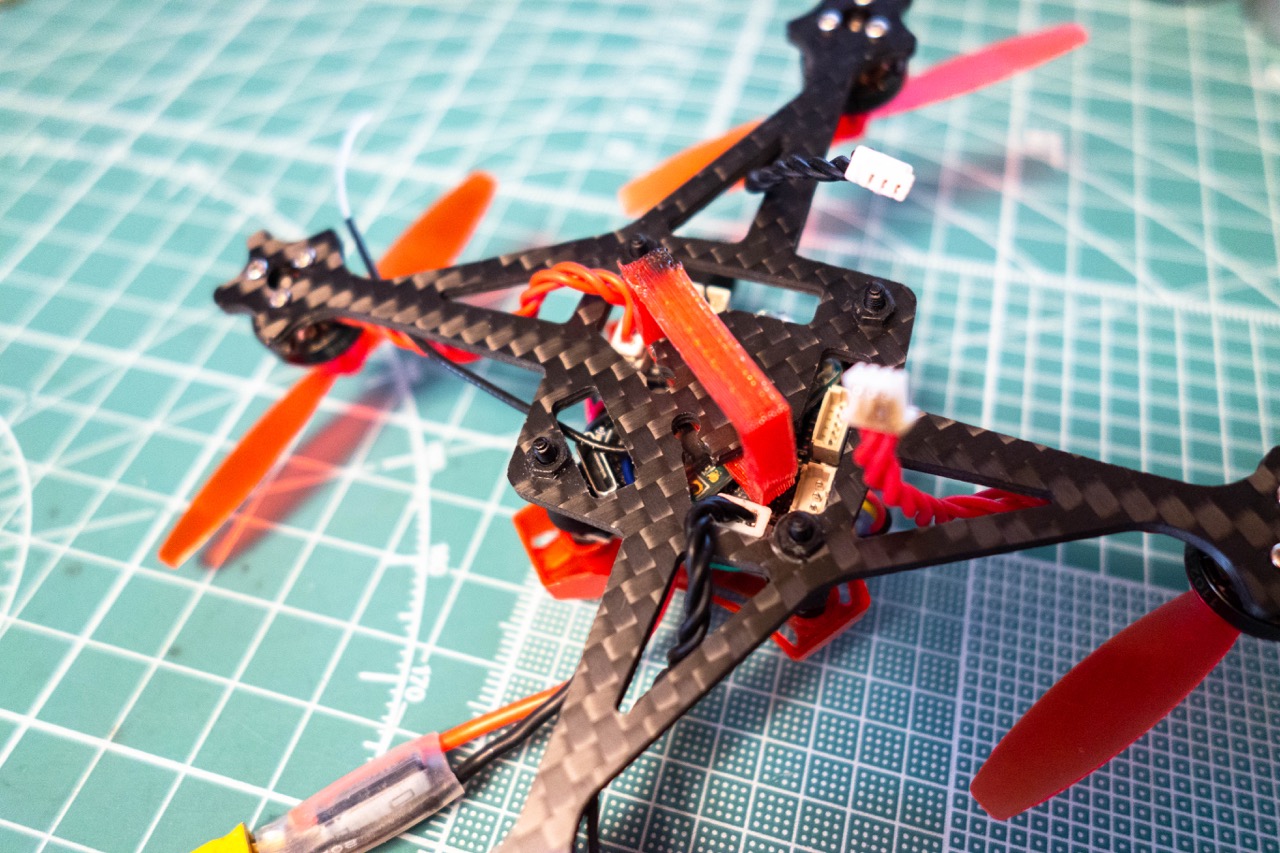
そして付属の長いゴムダンパーを使いFCを装着します。
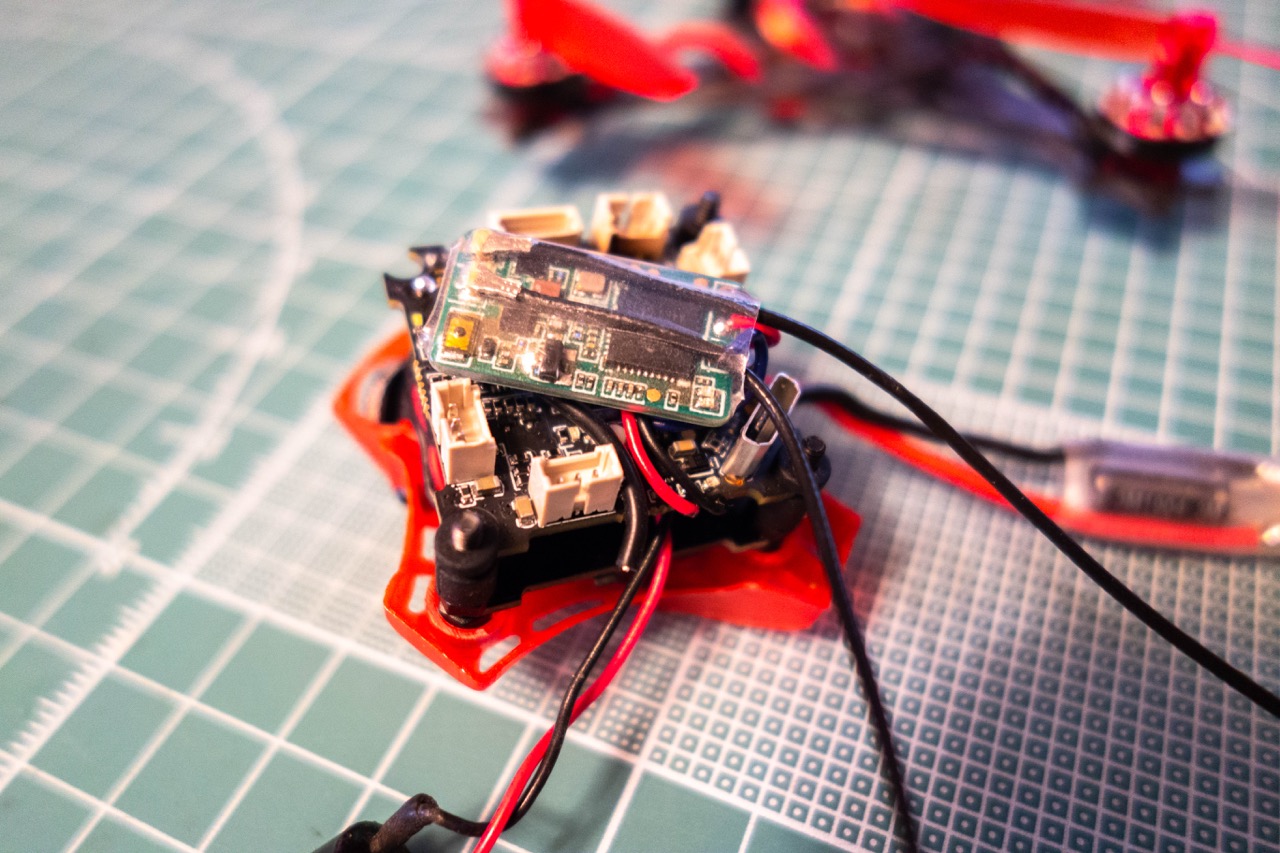
そしてフレームとFCの間をかさ上げするため(レシーバーを格納する予定)、M2×5+6mmのHex Spacerで固定します。

こんな感じですね。
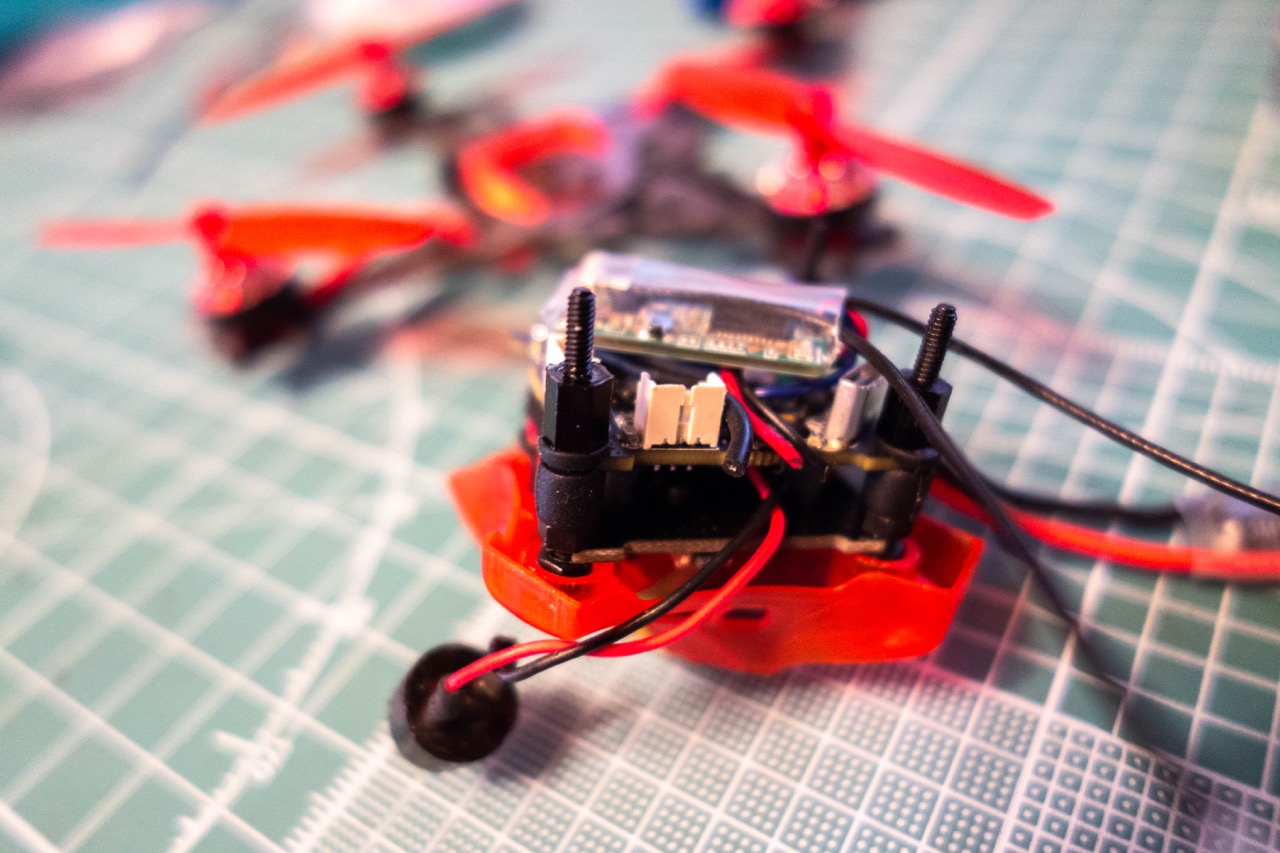
あとは前方部分もかさ上げしてあげます。
同様にM2×5+6mmのHex Spacerを使い短いゴムダンパーを固定しておきます。

あとはキャノピー部分をごっそりフレームに差し込みフレーム底面からM2ナットで固定して完了です。
グラつくことなくかなりしっかりと固定できました。
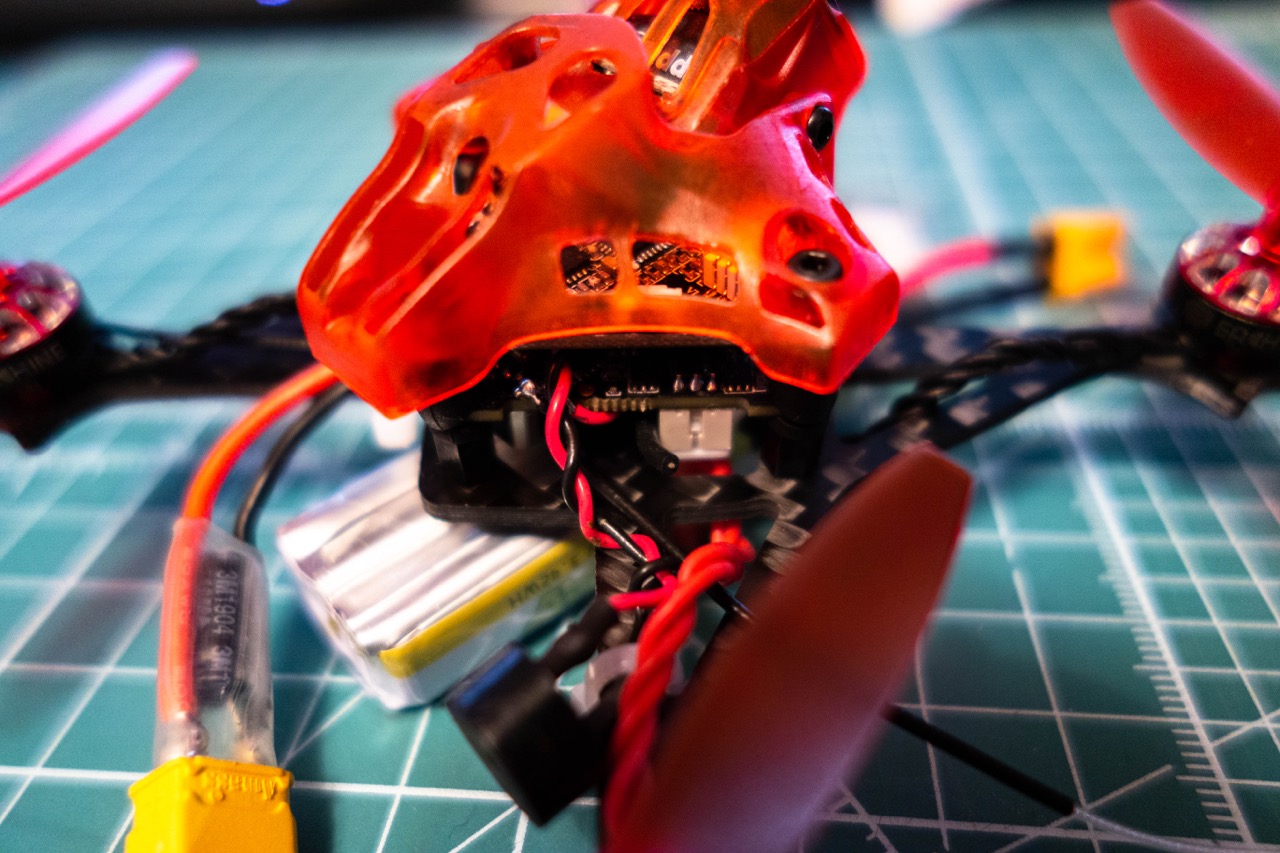
これで上記の3点も改善されたかと思います。

室内テストでは特に問題はなかったのですが、野外で飛ばしてみて新たな問題点も見つかるかもしれません!
カスタマイズの一例として参考にしていただければと思います。
いろいろカスタマイズを自分で考えるのもドローンの楽しさの一つですね!



 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  Sailfly-XくんのFC焼けました!3セルToothpickで5A ESCってどうなの?FC変えて作り替えてみました!
Sailfly-XくんのFC焼けました!3セルToothpickで5A ESCってどうなの?FC変えて作り替えてみました!  Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!
Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!  【BETAFPV HX100 SE】BETAFPVの新しい軽量1セルToothpick HX100 SE。新規格BT2.0コネクタを採用でその飛びが気になります!
【BETAFPV HX100 SE】BETAFPVの新しい軽量1セルToothpick HX100 SE。新規格BT2.0コネクタを採用でその飛びが気になります!  初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました!
初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました!  【Tiny Whoop】今年も楽しかったドローン生活2019年を振り返ってみる!
【Tiny Whoop】今年も楽しかったドローン生活2019年を振り返ってみる!  気になるToothpick『FLYWOO XBOT65 HD』『FLYWOO XBOT3 HD』
気になるToothpick『FLYWOO XBOT65 HD』『FLYWOO XBOT3 HD』  【BETAFPV HX100 SEカスタマイズ 】C01 Proカメラ&Diamond VTXにカスタマイズ!したのですが・・・接続切れ続出!
【BETAFPV HX100 SEカスタマイズ 】C01 Proカメラ&Diamond VTXにカスタマイズ!したのですが・・・接続切れ続出!


ご丁寧にありがとうございます。
日曜日に、この機体をポチリまして、改良が必要とのことで頑張ってみます。
私は、Mobula7で初めてアクロモードの楽しさを実感しました。そしてさらなる新しい体験を楽しみにしています。
ありがとうございました。
改良が必ず必要という訳ではないのですが、Whoopの感覚で飛ばすとぶっ飛んでいくので、受信機の増設時にいろいろ気になるところを改良してみました。
ほんと楽しい機体です。
これからもよろしくお願いしますー!
tacalikaさん、はじめまして!
すいません、リンク先入れるの忘れてました!
リンク貼っておきましたのであらためて見ていただけますでしょうか。
私はヘリモンさんで購入したのですが、先程見てみたら在庫切れ状態でした。
近いサイズのものも購入して数パターン試してみて私的にベストなサイズと思われるのがブログでお伝えしたものでした。
ヘリモンさんは何度か問い合わせしたことがありますが、かなり早く対応して頂けると思いますので、もし同サイズのもので組まれるのであれば一度問い合わせしてみてはいかがでしょうか。
いつも楽しく拝見しています。
下記、部品が見つかりません。リンクを教えて頂けないでしょうか。
M2×16mmの金属製のネジ と M2×5+6mmのHex Spacer
宜しくお願い致します。