
前回『最軽量4K CineWhoop『Eachine Cinecan 85mm 4K Cinewhoop』がやって来た!』の続きとなります。
4K CineWhoop『Eachine Cinecan 85mm 4K Cinewhoop』を飛ばせる状態にするまでのバインドから最低限のBetaflight設定をやっていこうかと思います。
85mmフレームサイズの機体ですが、室内2セルでも飛ばせられるのは驚きです!
今回のBetaflight設定を仕事の空き時間でやってしまい軽く室内テストフライトのつもりが・・・普通に室内2セル飛行が出来ちゃうからもうハマっちゃいますよねー!
最近はToothpickを飛ばすようになり、メインだった2セルバッテリーから徐々に3セルバッテリーへと移行しているのですが、Toothpickのすっ飛んでいく3セル飛行にはまだまだ慣れず・・・
このEachine Cinecanくんでの野外3セル飛行も少しビビりながらテストフライトに望んだのですが・・・。

Eachine製ということや見た目から2セル機のTRASHCANのような少し癖のある(ピーキーな感じ?)をイメージしてたのですが、どちらかと言うとMobula7のようなマイルド?な飛びに近くて飛ばしやすく!
4K CineWhoopはお初なので比べる対象がないのですが、手持ちの機体で言うとBeta85X HDの2セル飛行の時のような重さはほぼ感じられず、3セル飛行時の重量機を飛ばしている感覚とは対照的な、Mobula7を3セルで飛ばしているような感覚に近いかと思います。
そして前回、機体を解体して内部構成をチェックした際にブザーの設置をしたのですが・・・後々受信機の増設(Frsky xm+)も考えておりもう一度機体を解体することを考えると一緒にやってしまった方が良かったかなと少し後悔!
受信機の増設に関しては次回ご紹介したいと思います。
同様のことをお考えの方は、ブザーの取り付け&受信機の増設作業を一度でやってしまった方がいいかもしれませんね!
かなかな機体の解体作業が面倒ですから・・・。
それではBetaflight設定をやっていきましょう。

目次
【Eachine Cinecan】バインドから最低限のBetaflight設定!

ブザーの取り付け!
Betaflight設定の前にロスト防止のためブザーの取り付けをやっていきます。(不要な方は飛ばしてください!)
こちらは前回、機体を解体し内部構成をチェックした際にやってしまいました。
FCのブザーポートにアクセスするにはここまで機体を解体する必要があります。
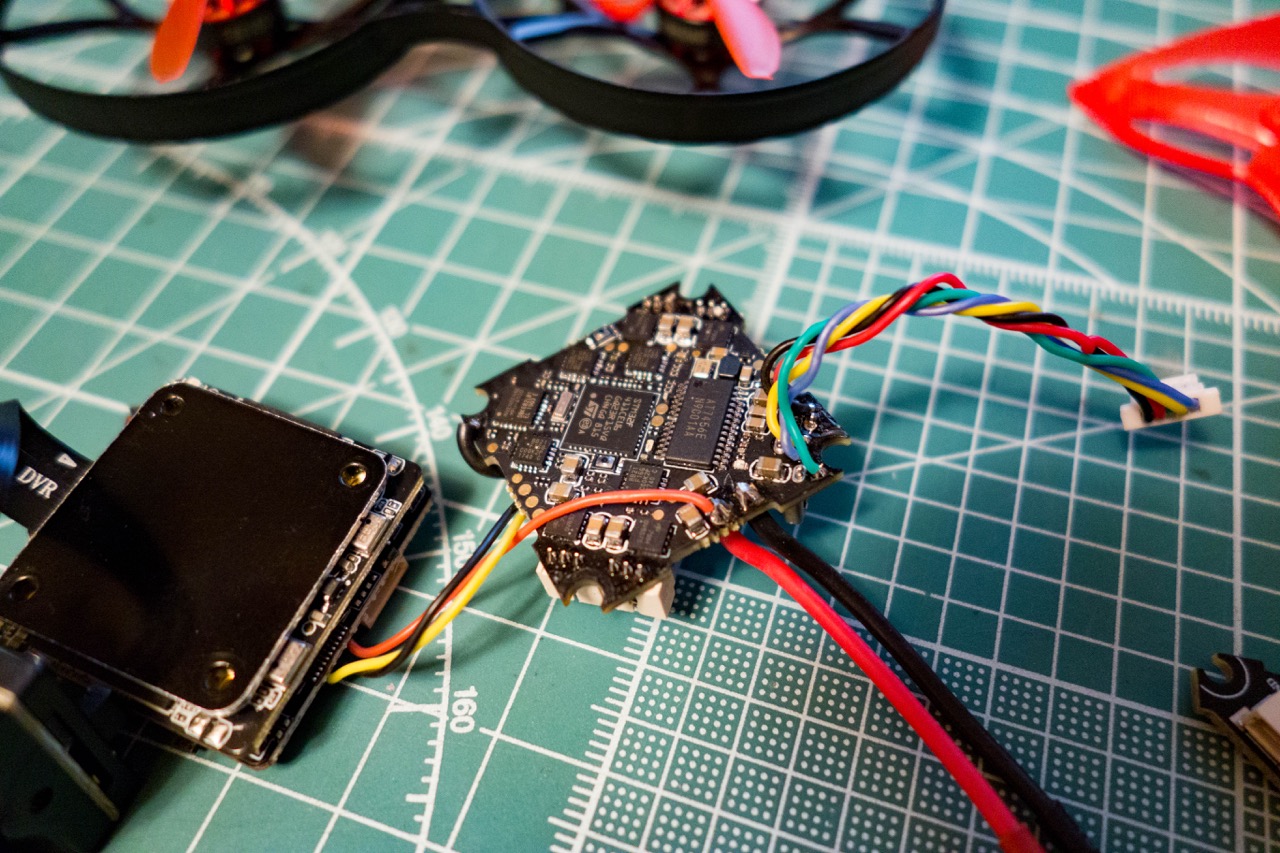
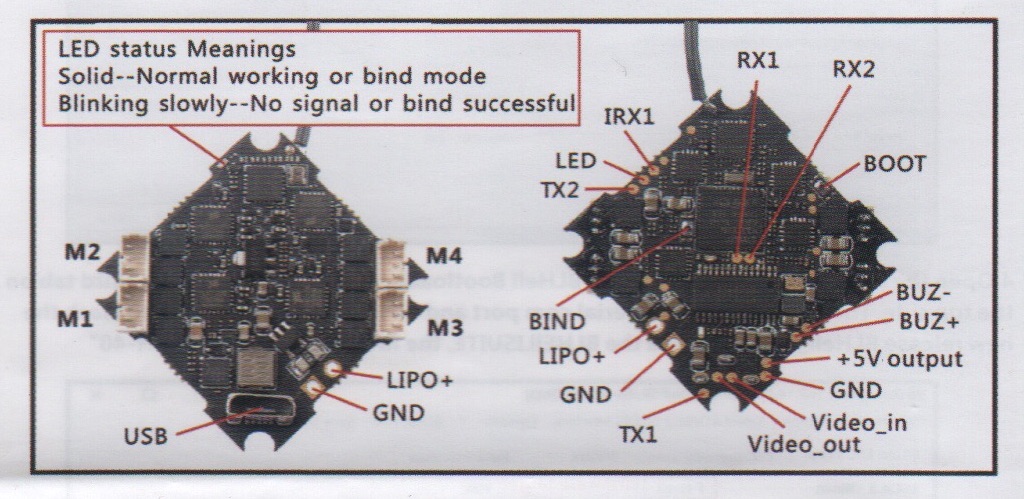
付属のマニュアルで『Crazybee F4 PRO V3.0 Flight Controller』のブザーポートを確認します。

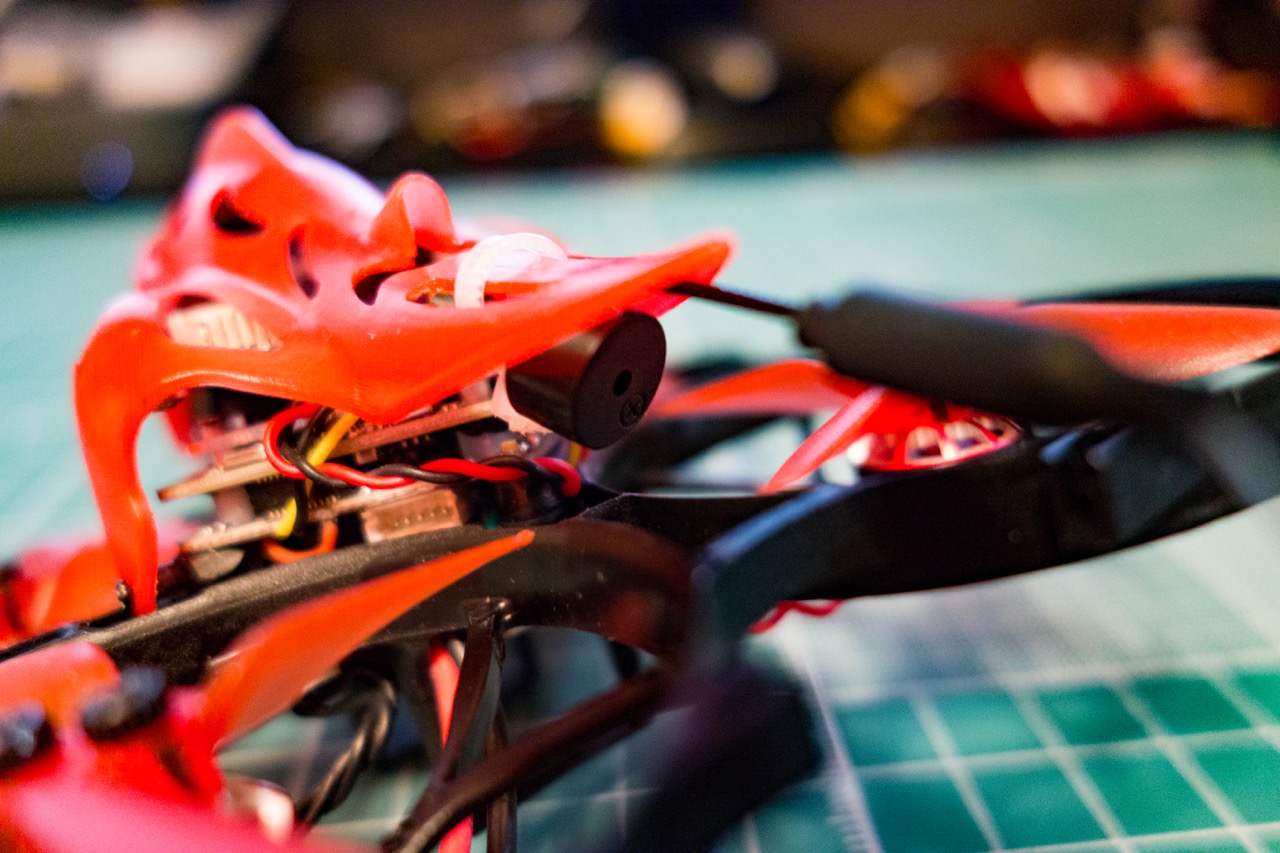
機体の解体は少し大変ですが、ブザーの取り付け自体は簡単です!

こんな感じでブザーの設置は完了です!
それではBetaflight設定をやっていきましょう。
Betaflight 設定 & バインド!
ここからBetaflightの設定に移りますが、飛ばせる状態にするまでの最低限の設定に限定してご紹介したいと思います。
デフォルトの設定値を保存!
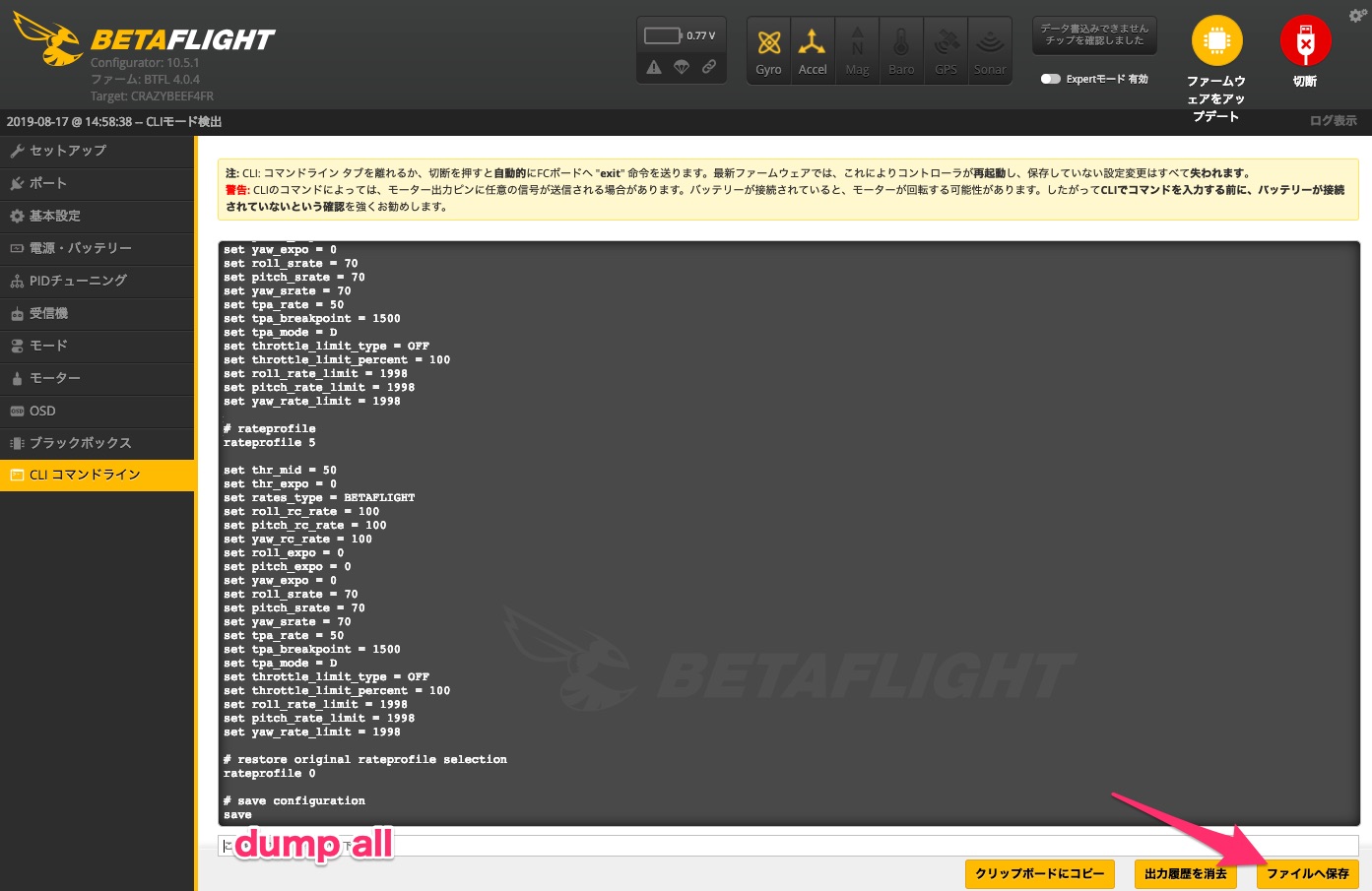
まずは初期状態の設定を保存しておきます。
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。
ポート設定!
ポート設定はデフォルトの状態で特に問題なさそうですね!
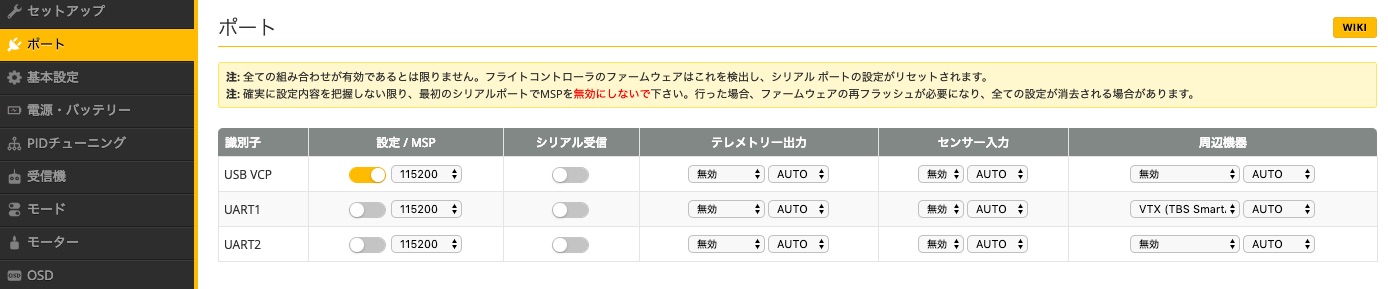
外部受信機(Frsky xm+)増設の際は、FCのIRX1ポートに受信機のSBUSを繋ぎUART1にシリアル受信を割り振り、VTXからFCに接続されているSmart Audio端子もTX2ポートに繋ぎUART2に割り振り直す必要があります!
このEachine Cinecanは標準で200mW出力VTXが搭載されていますが、これに伴いFC内蔵の受信機では野外で飛ばす際に少し心もとないので上記のような受信機の増設を考えています。
FC内蔵受信機の電波到達距離は300mとよく書かれていますが、私の手持ちの機体で言うとMobula7やBeta65ProのFC内蔵受信機では50mほどしか飛ばず何度もノーコン状態になり機体探しに苦労した覚えがあります。

FCの個体差などもあると思いますが、野外機では基本受信機を増設した構成が望ましいと個人的には思っています。
受信機増設に関しては次回詳しくご紹介したいと思います。
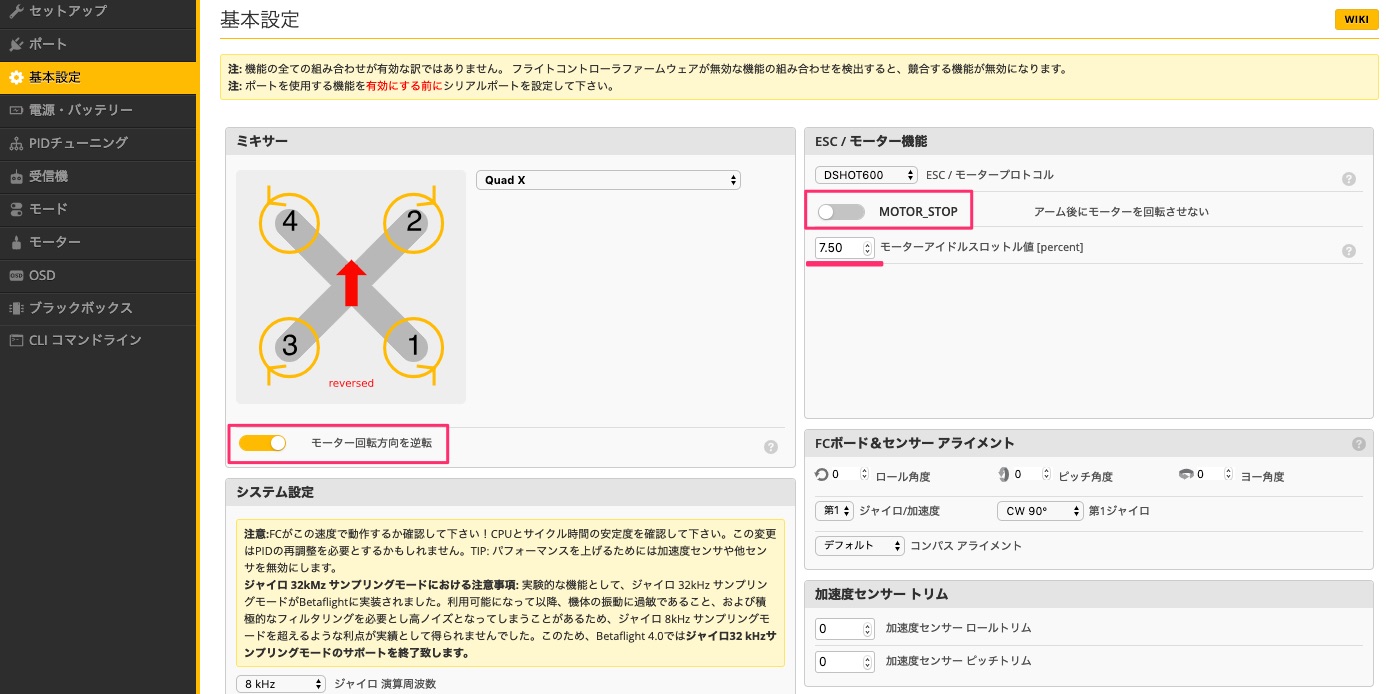
基本設定!
デフォルトで[モーター回転方向を逆転]設定にされていないので、PropWash対策のために逆転設定にしました。
[アーム後にモーターを回転させない]をオフに変更。
モーターアイドルスロットル値を初期状態の5.5から7.5まで上げてみました。(こちらはお好みで!)
機体が軽いのでこれくらい上げてあげると浮遊感を楽しめます。
今回はBLHELIでモーターの回転をreversed設定にしペラを付け替える方法でやってみました。
詳しくは後述します。
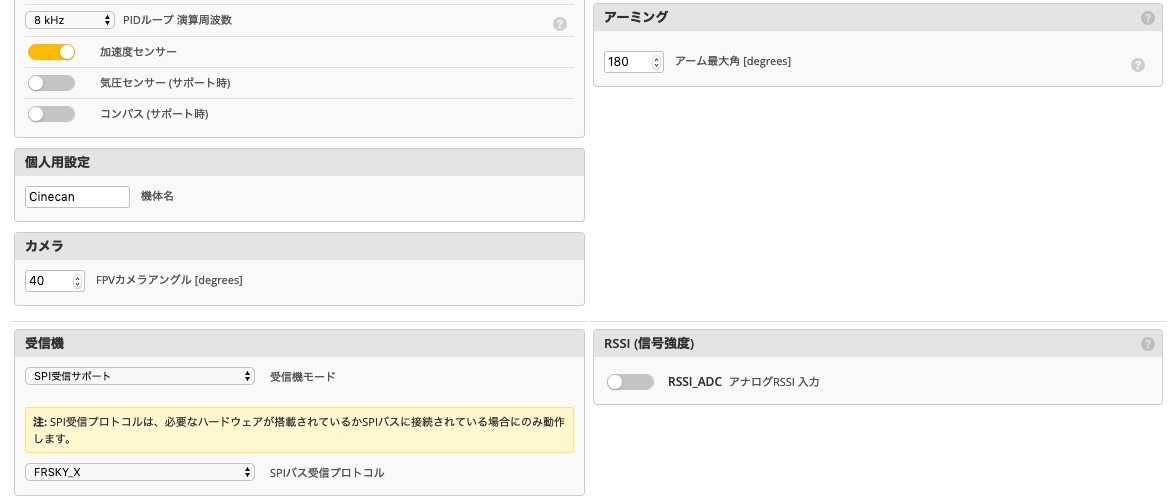
アーム最大角はデフォルトで180°に設定されているので問題ないですね!
機体名を入力し、カメラアングルを40°に変更しました。
[受信機]設定をデフォルトのFRSKY_DからFRSKY_Xに変更しました。(デフォルトでも問題ありません!)
エアーモードを常時使用をオンに設定しました。(こちらはお好みで!)

[ビープ音設定]はデフォルト状態のままで特に問題ないですが、[Dshotビーコン設定]をオン設定に変更しました。

電源・バッテリー設定!
バッテリー容量を300mAhに設定。
その他は特に初期状態の設定で問題ないようですが、HVバッテリー使用がメインとなりそうなので最大電圧を4.5に上げ、警告電圧及び最低電圧を少し下げました。
あとは飛ばしながら微調整していけばいいと思います。

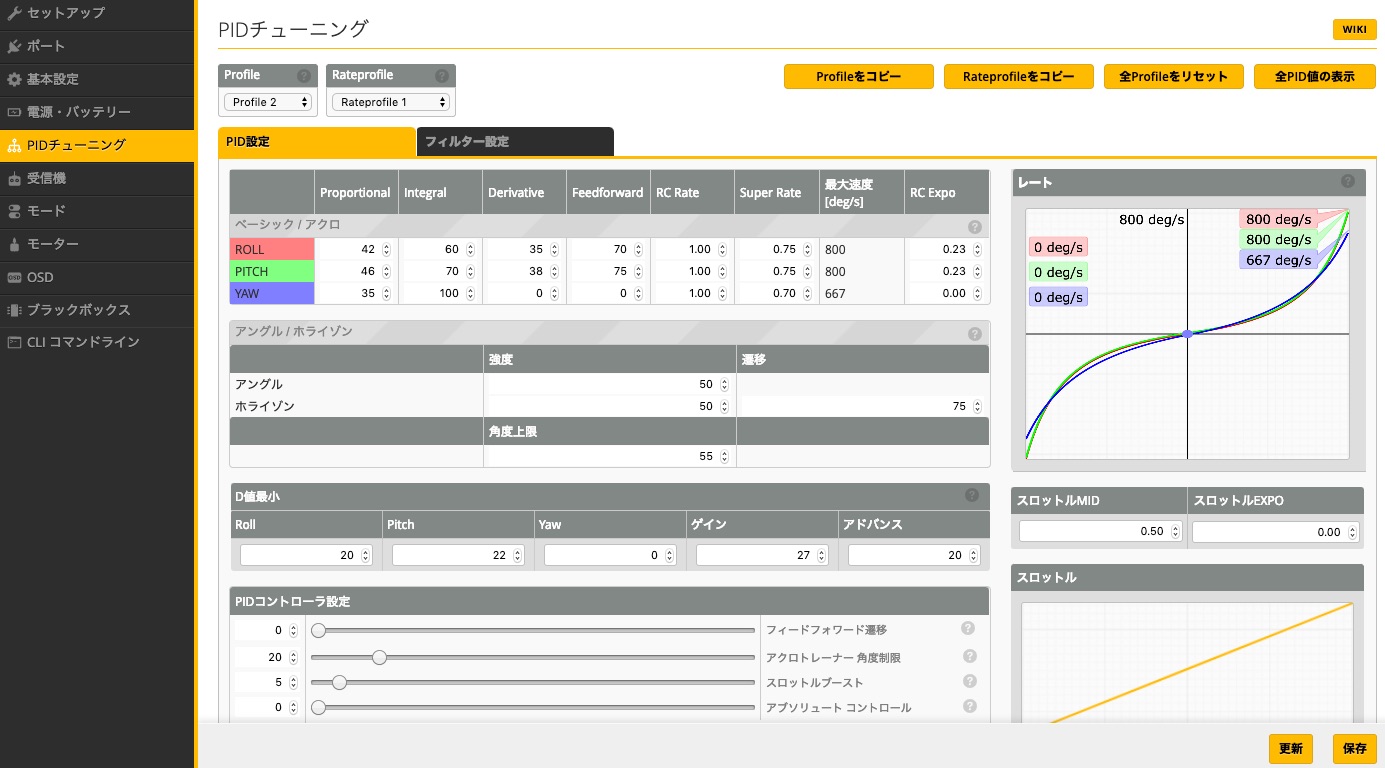
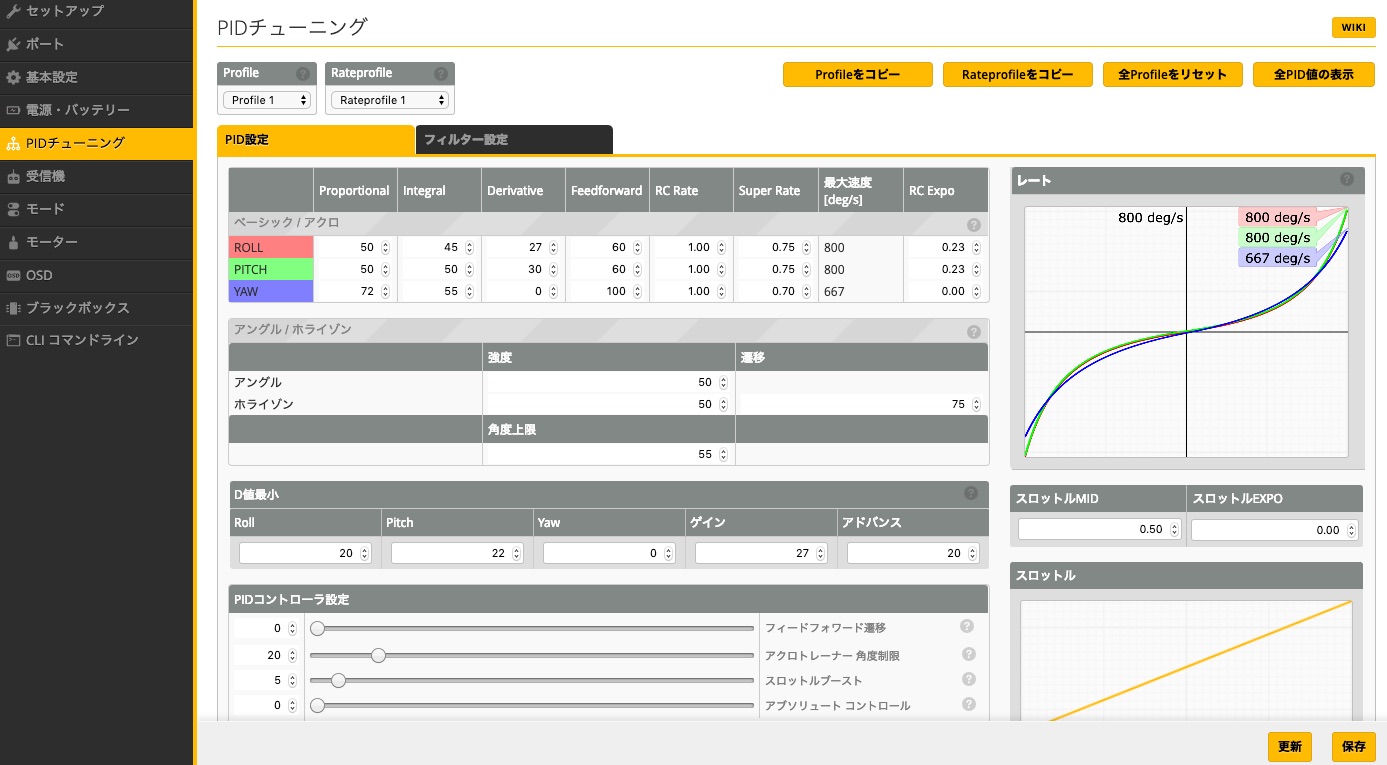
PIDチューニング!
デフォルトで設定されているPID設定は以下の2つです。
設定は普段飛ばされている機体を参考にお好みで設定してみて下さい。
機体とのバインド!
ここまで設定ができたら機体と送信機のバインド作業に移ります。
USB接続のみでバインド作業はできます。(バッテリー接続の必要はありません)
物理的にFCのBINDボタンを押すのが困難なので(機体をバラさないとボタンが押せない)、CLIコマンドラインからバインドモードに入り送信機とのバインドを行いました。
CLIコマンドラインから【bind_rx_spi】と入力しバインドモードに入ります。
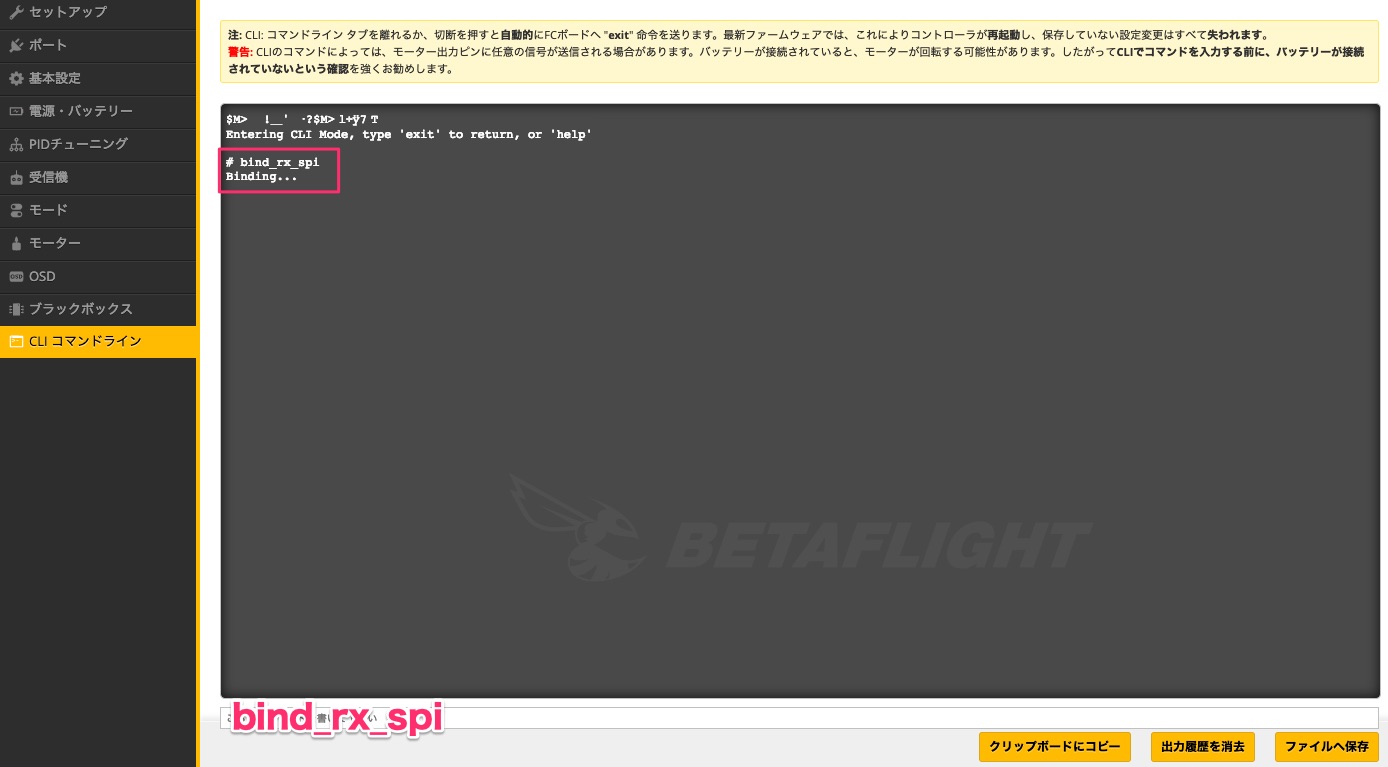
あとは通常の作業(送信機側もバインドモードに)でバインドして完了です。
送信機とのバインドが完了したら、一旦USB接続を解除し電源オフ後、もう一度Betaflightに接続し他の設定をしていきます。
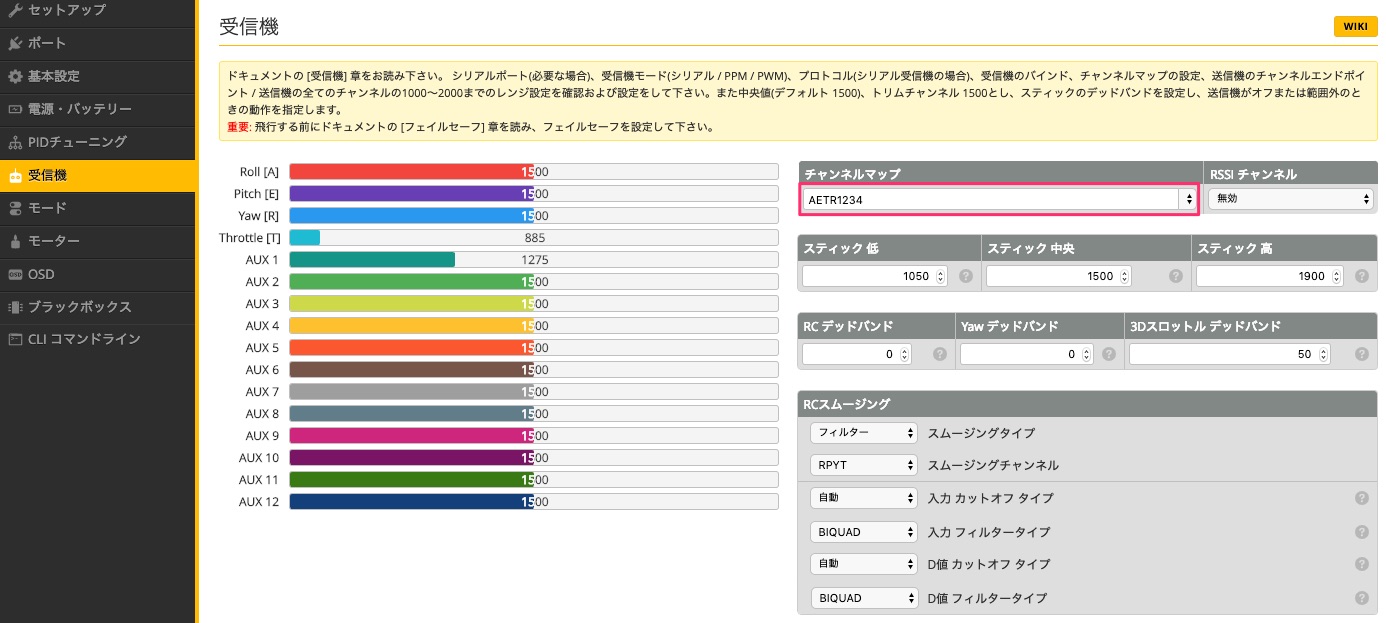
受信機設定!
送信機とのバインド作業が完了したら、次に【受信機】タブへと移ります。
チャンネルマップをAETR1234に設定。(ここではFC内蔵受信機がFrskyで説明していきます。)
モード設定!
初期状態ではARMとHORIZONのみが設定されています。
最低限の設定(フライトモード・ブザー等)を追加します。

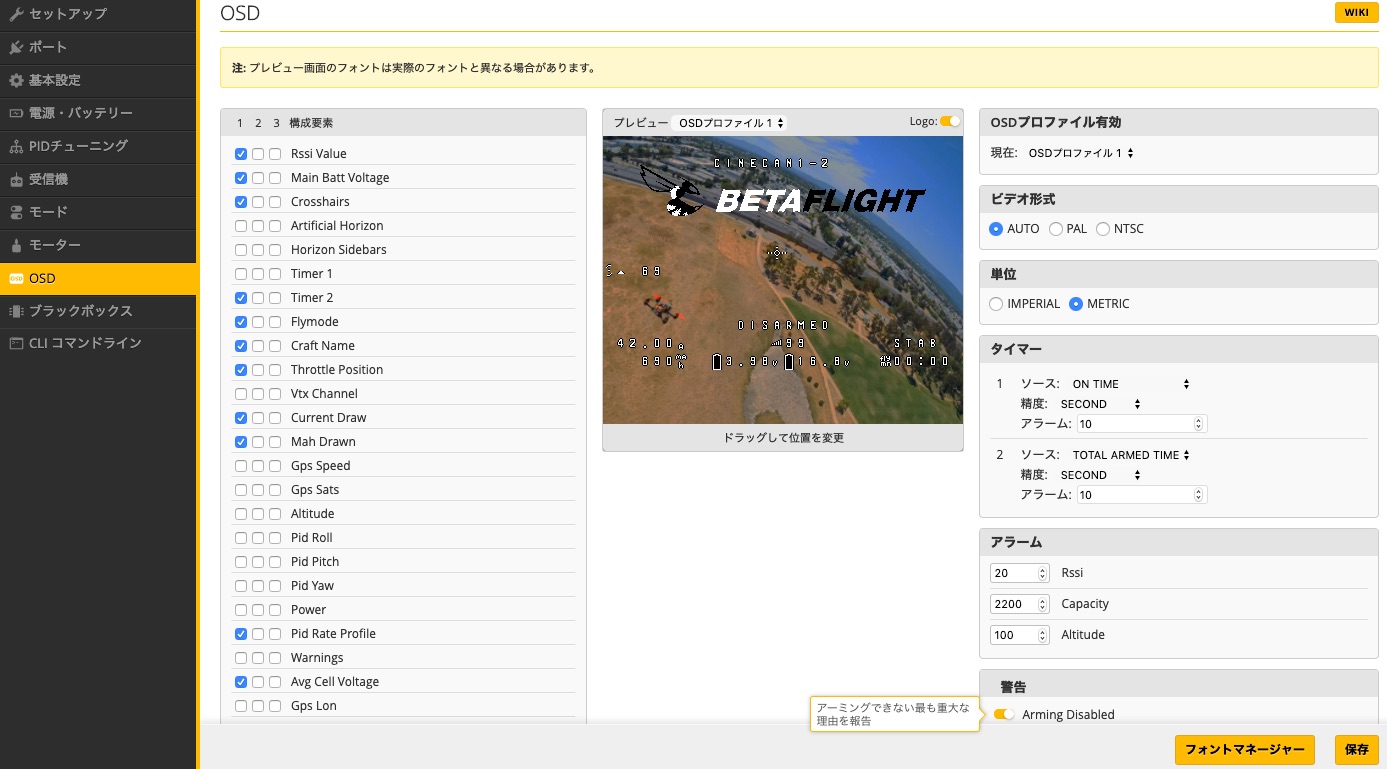
OSD設定!
こちらはお好みで設定して下さい!
VTXのBand & Channelの設定!
ゴーグルに映像を送信するためのVTXの送信周波数を設定します。
【CLIコマンドライン】から設定していきます。
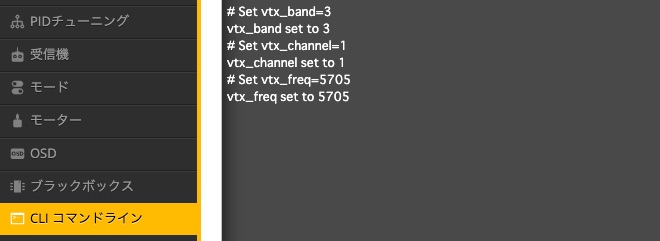
Set vtx_channel=1
Set vtx_freq=5705
save
設定データの保存!
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
BLHELIでの設定!
上記Betaflightでの設定で、[モーター回転方向を逆転]設定にしました。
その際に物理的にモーターの配置を入れ替えた場合は必要ありませんが、今回はBLHELIからモーター回転を逆転させました。
BLHELIで全てのモーターをreversed設定して完了です!
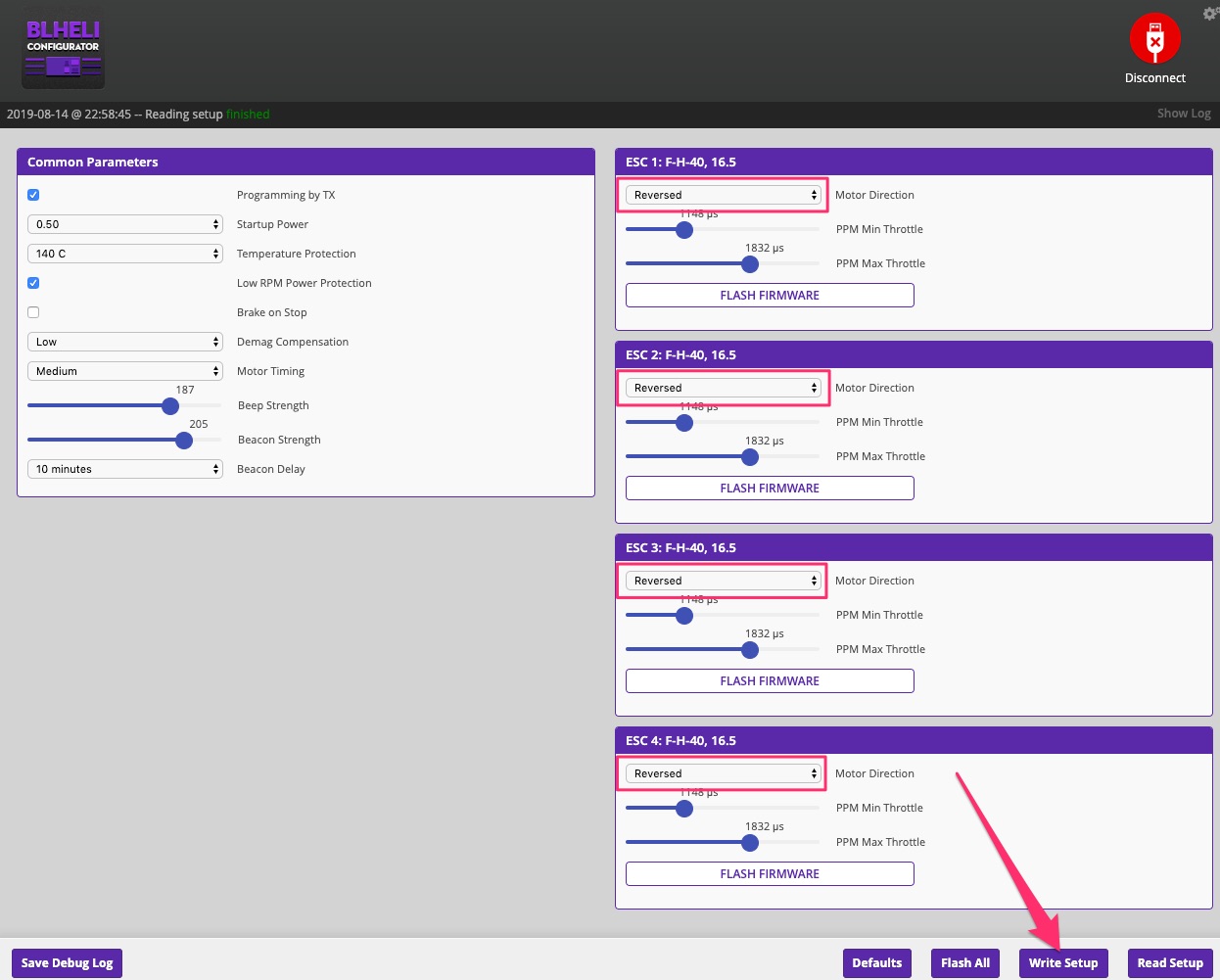
そしてペラの入れ替えもお忘れなく!

まとめ!
今回ブザーの取り付けからバインド、Betaflight設定をやっていきました。
室内2セル機としても楽しめ、また野外では3〜4セルの空撮機として飛ばせる・・・なかなか面白い機体ですね!

既にサクッと受信機の増設をやってしまったのですが、こちらは次回詳しくご紹介したいと思います。

 念願のCine Whoop『Beta85X HD』がやって来た!【BETAFPV】
念願のCine Whoop『Beta85X HD』がやって来た!【BETAFPV】  【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!
【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!  【BETAFPV】Beta85X HDにブザーを取り付ける!ブザー付きLEDボードを使えば一本配線を足すだけで意外と簡単に設置が出来ます!
【BETAFPV】Beta85X HDにブザーを取り付ける!ブザー付きLEDボードを使えば一本配線を足すだけで意外と簡単に設置が出来ます!  【FullSpeed TinyLeader】狭いスペースに何とかロスト防止用ブザーを取り付けることが出来ました!
【FullSpeed TinyLeader】狭いスペースに何とかロスト防止用ブザーを取り付けることが出来ました!  【Makerfire】Armor 85 HD 85mm Brushless FPV CineWhoop V2 レビュー!
【Makerfire】Armor 85 HD 85mm Brushless FPV CineWhoop V2 レビュー!  【Eachine Cinecanカスタマイズ】受信機(Frsky xm+)増設をやってみる!
【Eachine Cinecanカスタマイズ】受信機(Frsky xm+)増設をやってみる!  【FullSpeed TinyLeader】初期状態ではロックされているVTXのBandやChannel、送信出力を変更する方法!
【FullSpeed TinyLeader】初期状態ではロックされているVTXのBandやChannel、送信出力を変更する方法!  激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました!
激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました! 

コメントを残す