
世界最軽量4Kドローンと銘打つ『Eachine Cinecan 85mm 4K Cinewhoop』が最近仲間に加わりました。

4セルまで対応した4K CineWhoopですが機体重量が約64gと超軽量な機体となっており野外3〜4セル空撮機としてはもちろん、2セル室内機としても十分楽しめます!
前回、ロスト防止にブザーの取り付けを行いBetaflight設定をやっていきました。

室内&野外で軽く飛ばしたテストフライトでは問題なく飛んでくれたので、今回は外部受信機(Frsky xm+)増設を行いました。
基本、野外機は同様に受信機を増設しVTXも200mW出力が可能なものにカスタマイズするようにしています。
FC内臓の受信機は電波到達範囲300mとよく書かれているのですが、これには個体差があるようで私の手持ちの機体でいうとMobula7は特に弱く(FCの個体差等あると思います)、50mほど離れると電波が途切れノーコン状態になる・・・これにはほんとうに苦労しました!

飛ばし方にもよるかと思いますが、このEachine Cinecanくん野外4セル空撮機として飛ばせるので外部受信機を増設しておけば安心して飛ばせられるかと思われます。
今回このEachine Cinecanくんにも受信機(Frsky xm+)を増設してあげました!
それでは受信機の取り付けをやっていきましょう!

目次
【Eachine Cinecan カスタマイズ】外部受信機(Frsky xm+)の増設をやってみる!
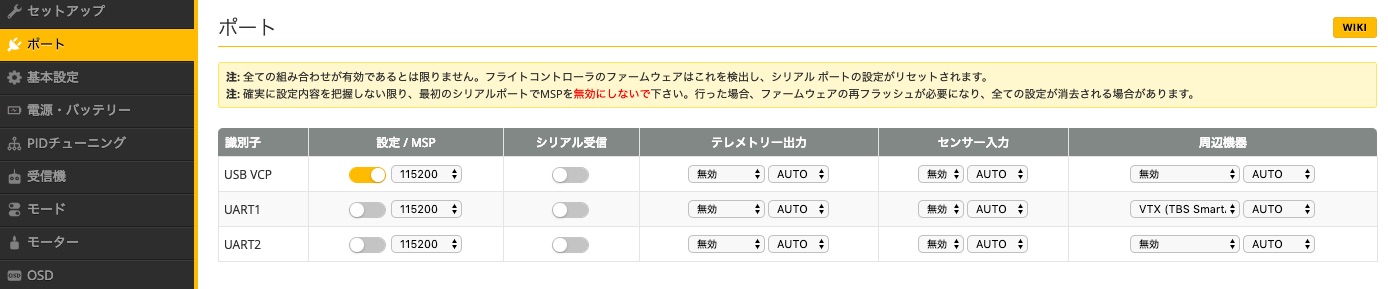
まずはBetaflightから受信機設定を確認してみましょう。
初期状態では、UART1にSmart Audio機能が割り振られています。
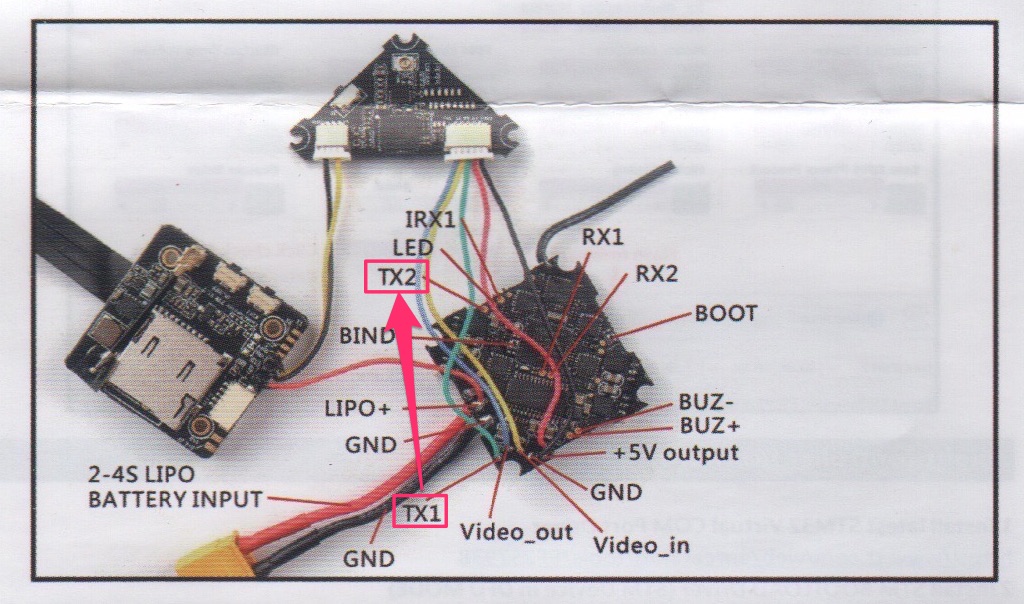
そして付属のマニュアルから『Crazybee F4 PRO V3.0 Flight Controller』のポートを確認してみます。
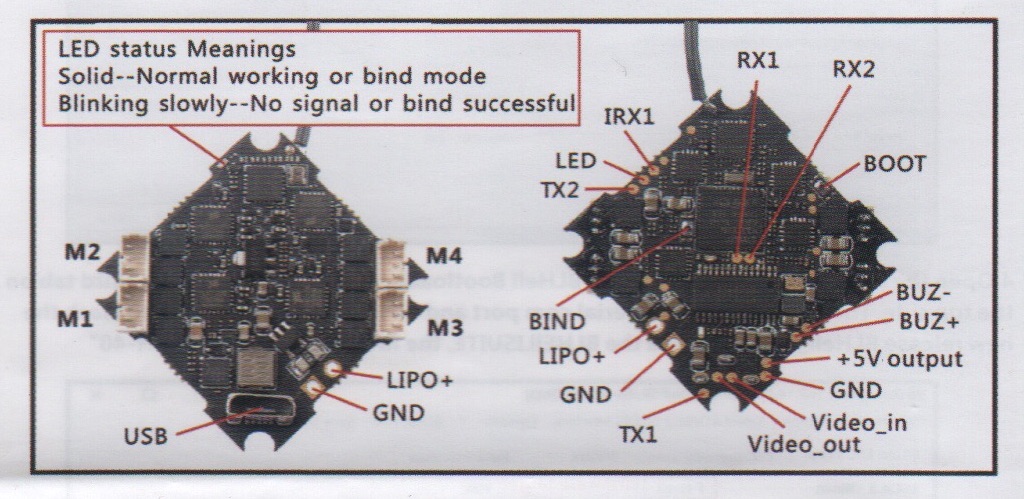
IRX1(Inverter for SBUS input)ポートが確認できます。
Frsky xm+のSBUS入力はこのIRX1に接続する必要があります。
しかし初期状態ではUART1にはSmart Audio機能が割り振られているので変更する必要があります。
具体的にはこのような作業手順となります!
- ①IRX1にFrsky xm+受信機のSBUSを接続し、電源(+5VとGND)をVTX用のポートから取る。
- ②初期状態でTX1ポートに接続されているSmart Audioの配線をTX2に接続し直す。
- ③BetaflightでUARTの割り振りを変更する。
- ④バインド作業。
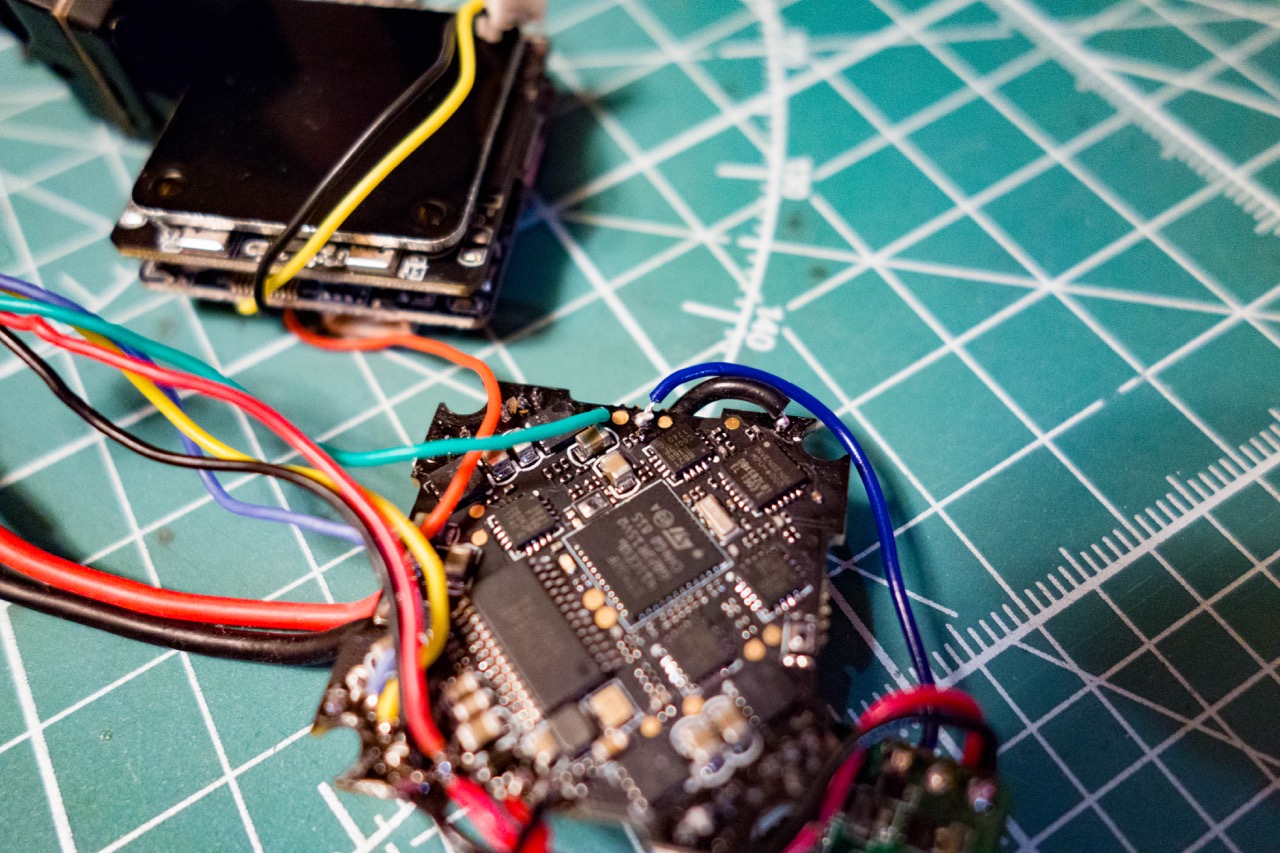
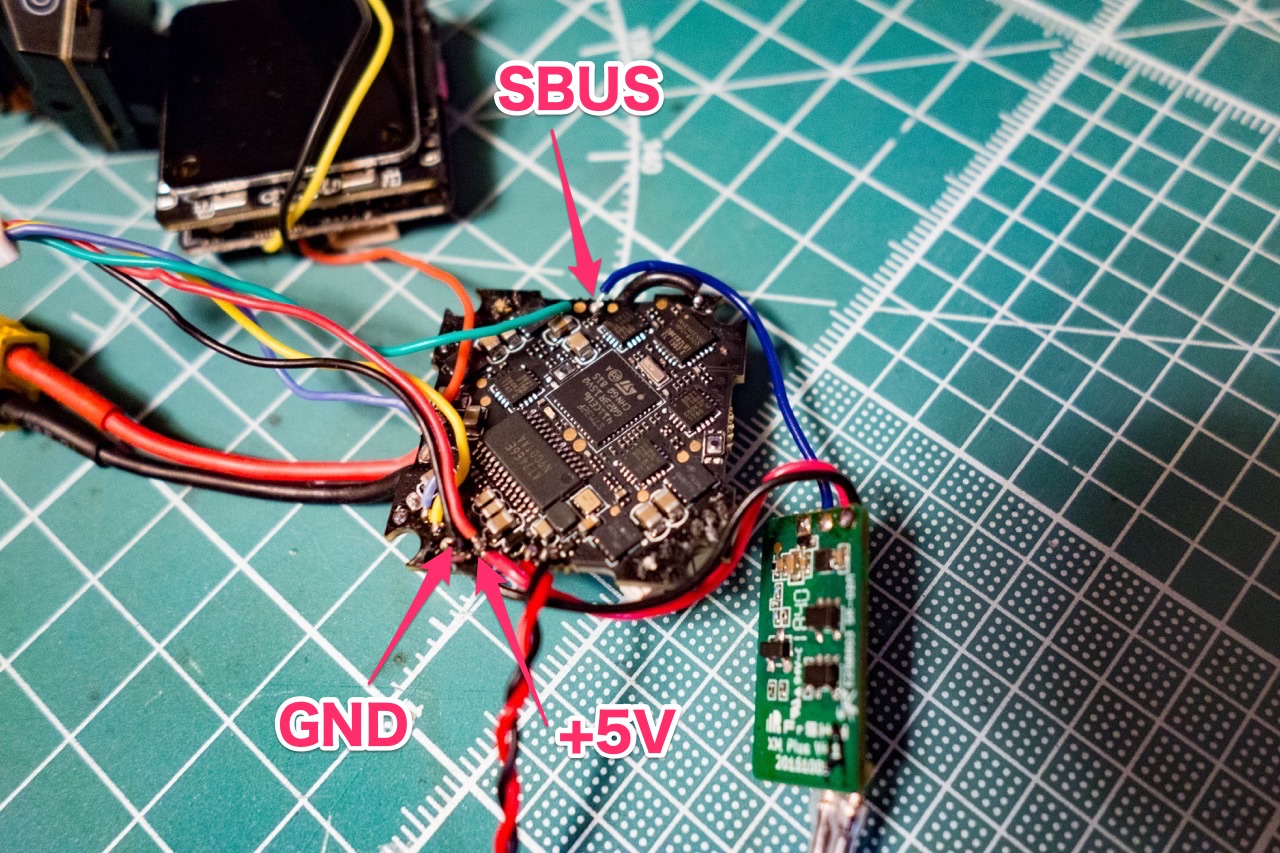
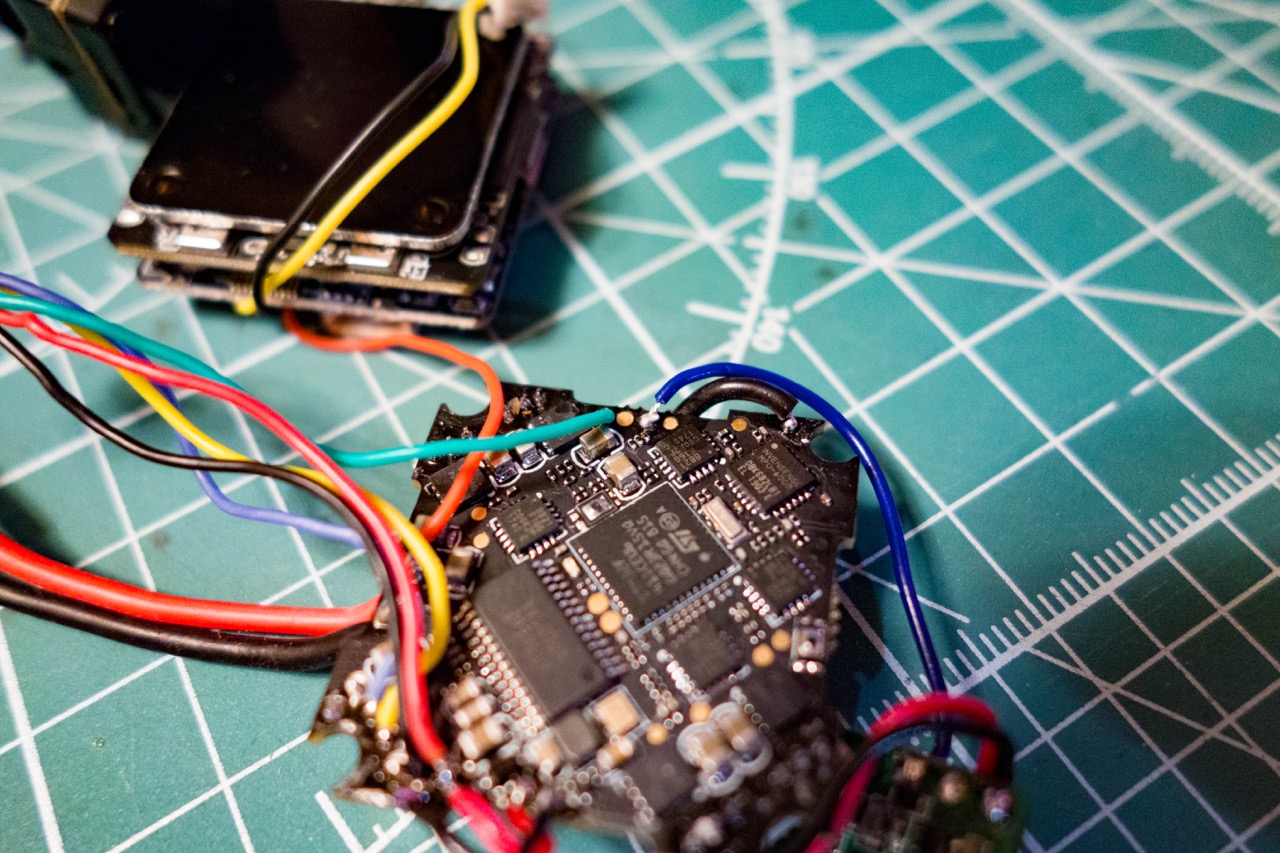
①IRX1にFrsky xm+受信機のSBUSを接続し、電源(+5VとGND)をVTX用のポートから取る!
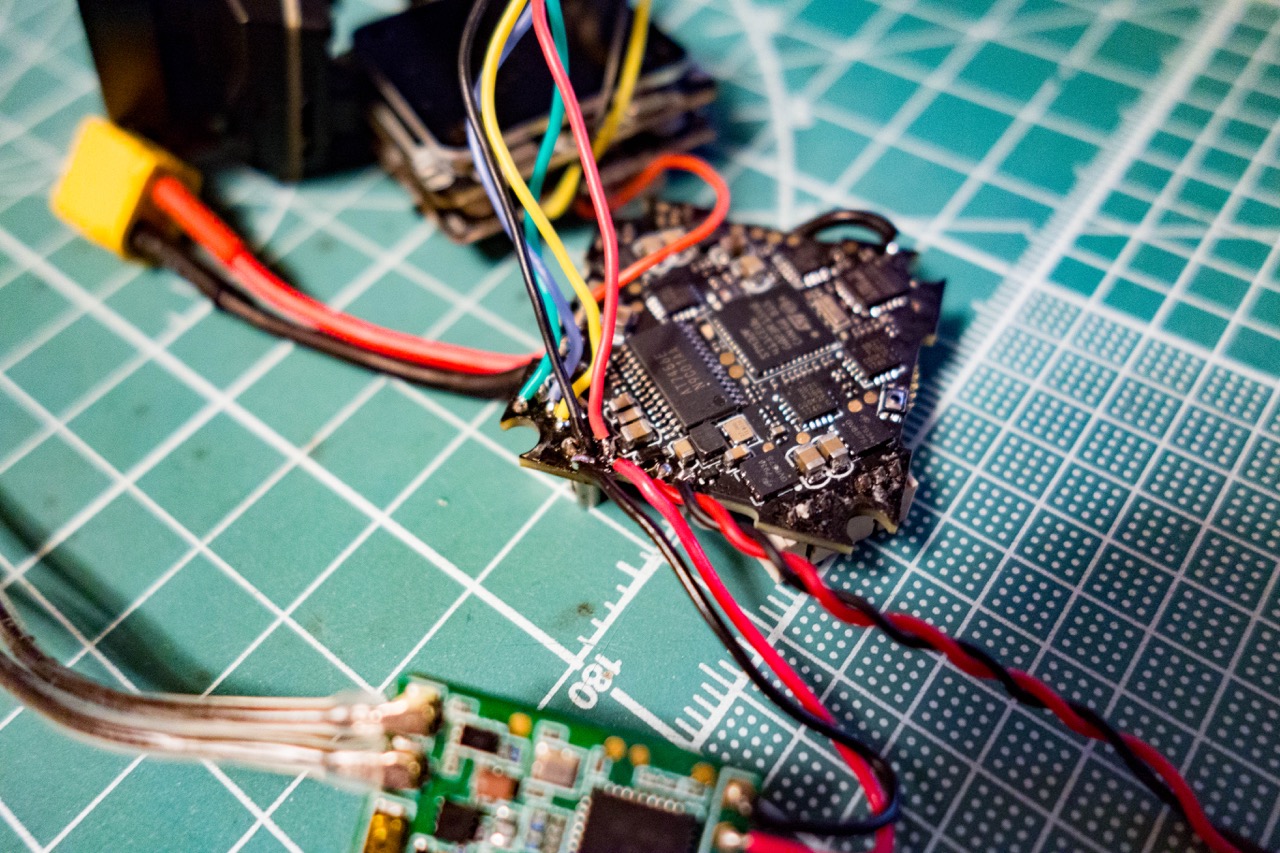
それでは受信機の取り付けをやっていきます。
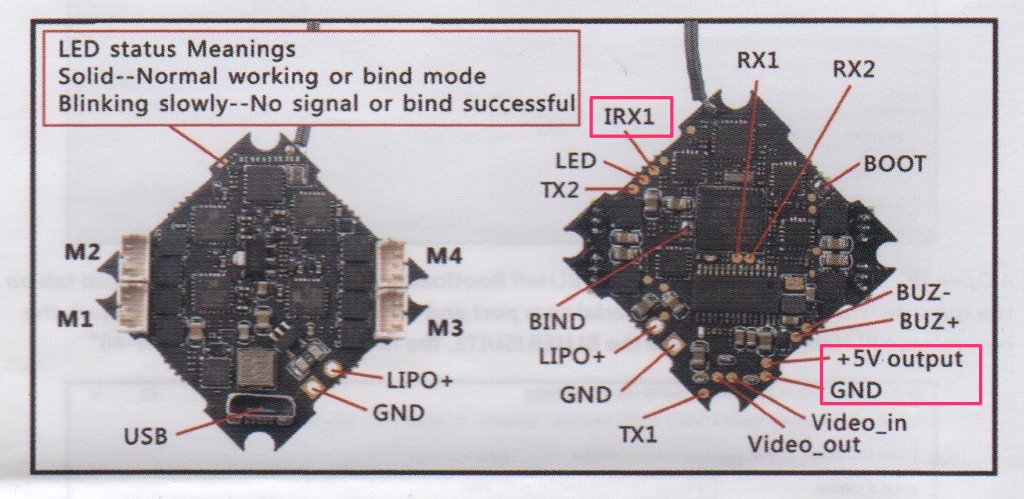
Frsky xm+受信機のSBUSをIRX1ポートに接続します。
また、このFCには電源を取れる空きポートがないのでVTXで使っている電源を共有することにしました。
②初期状態でTX1ポートに接続されているSmart Audioの配線をTX2に接続し直す。
SBUSでIRX1ポート(UART1)を使うので、初期状態でTX1ポートに繋がれているSmart AudioケーブルをTX2(UART2)に接続し直します。
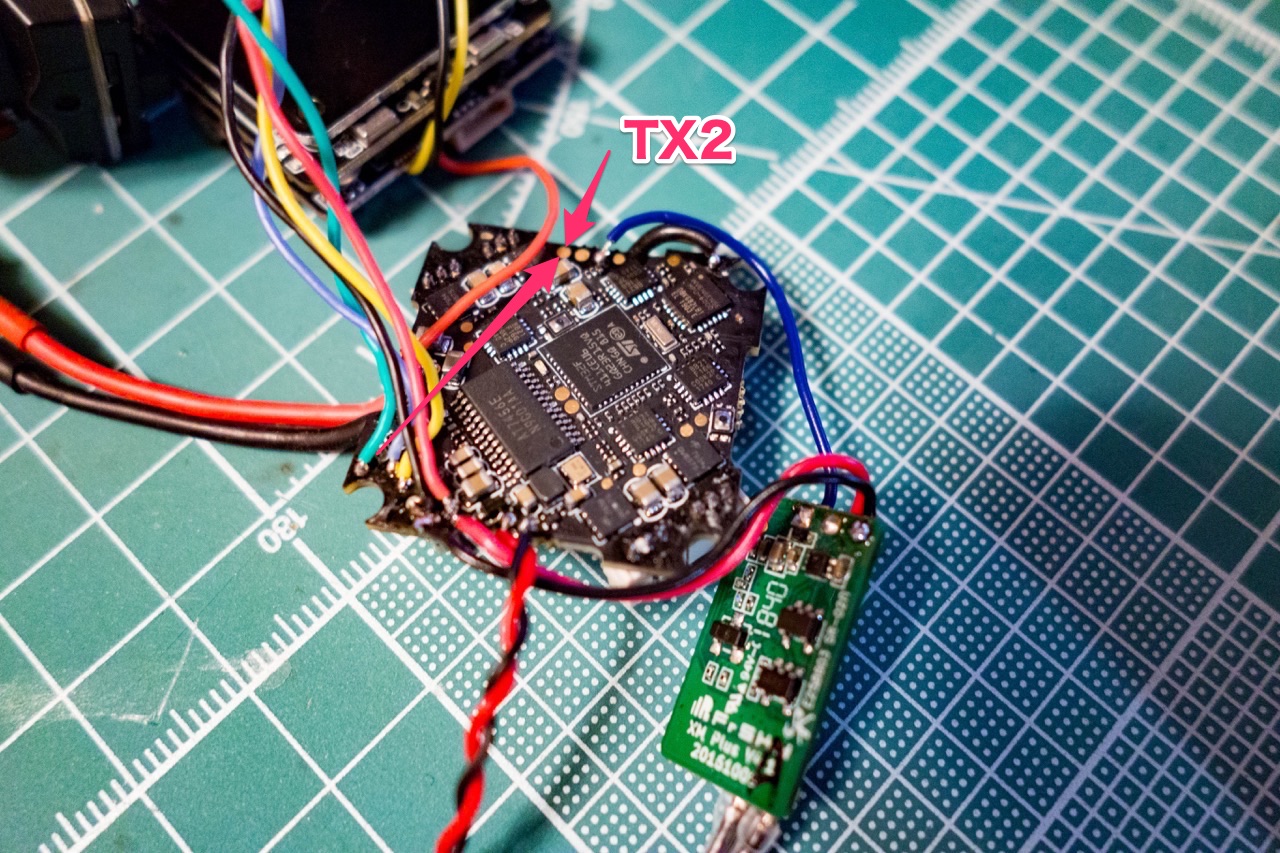
受信機の取り付けは以上となります。
③BetaflightでUARTの割り振りを変更する。
次にBetaflightの設定に移ります。
取り付けたFrsky xm+受信機とのバインド作業もあるのでこの状態のまま作業を進めていきます。
【ポート】タブからUART1のSmart Audioを無効にしシリアル受信をオンにし、UART2にSmart Audioを割り当てます。

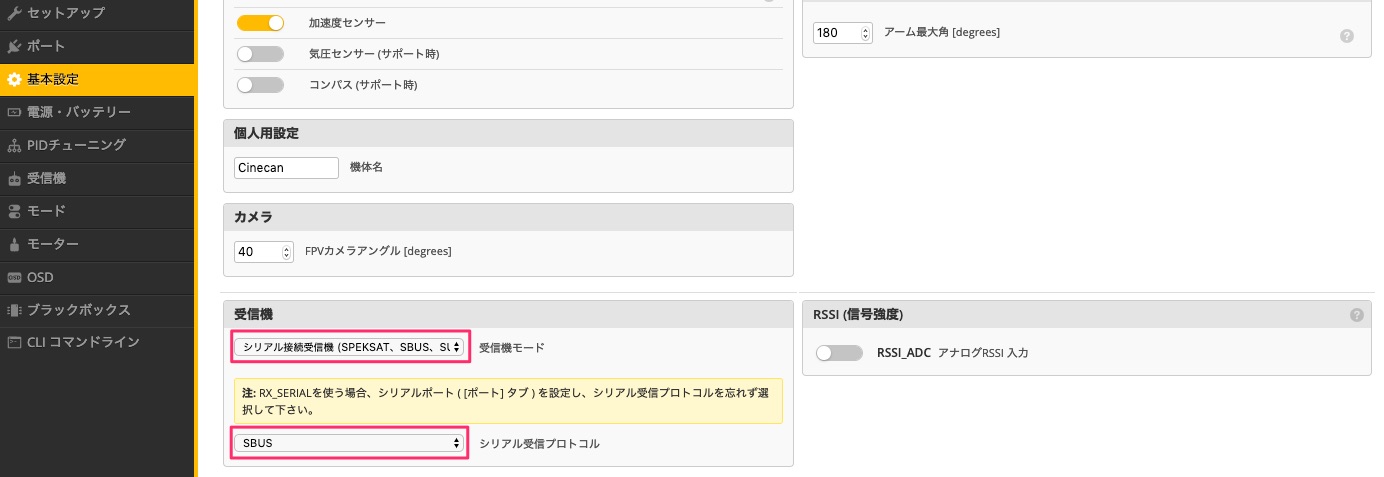
次に【基本設定】タブの[受信機]項目にシリアル接続受信機(SPEKSAT,SBUS,SUMD)を選択し、シリアル受信プロトコルに[SBUS]を選択して完了です!
④バインド作業!
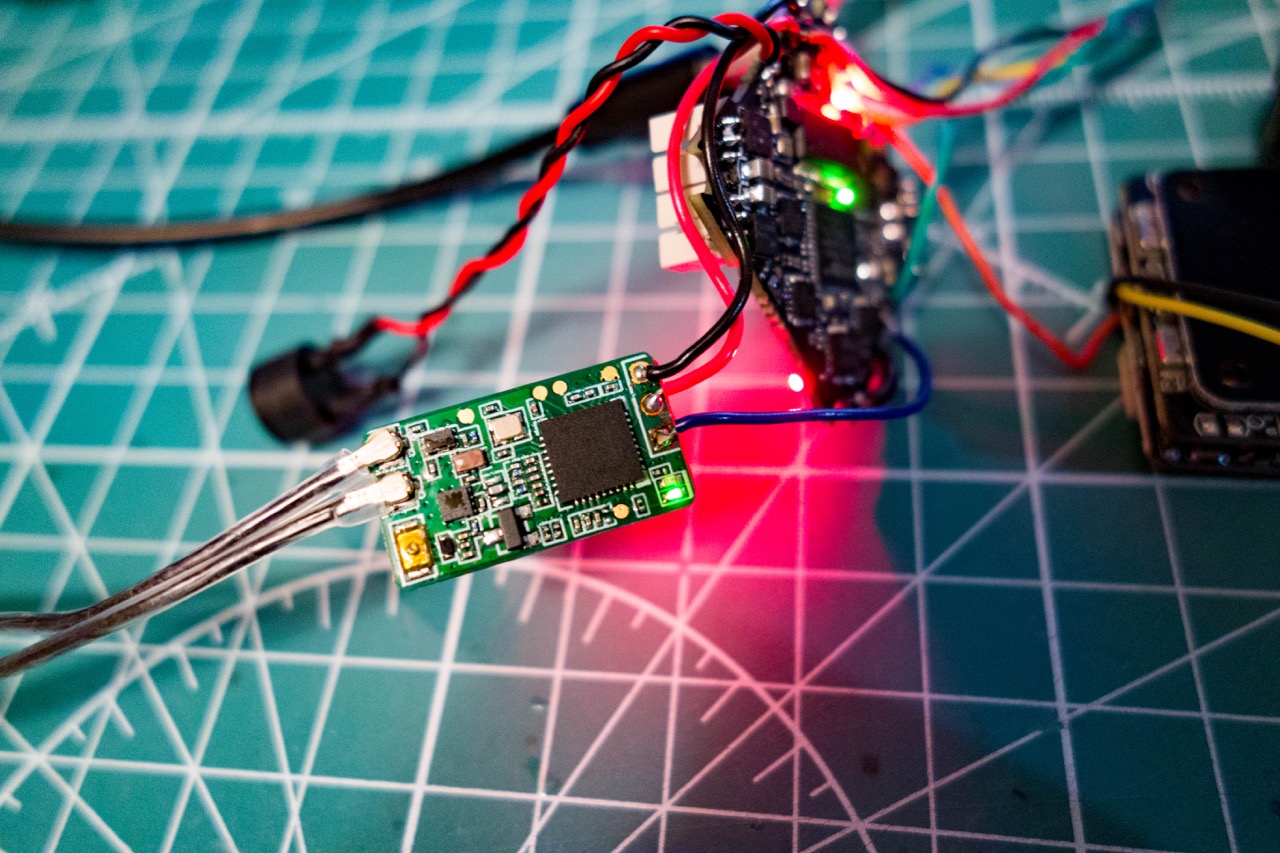
最後にFrsky xm+受信機とのバインド作業に移ります。
受信機のバインドボタンを押した状態で電源を投入(USB端子に接続)するとFrsky xm+受信機がバインドモード(赤と緑のLEDが点灯します)に入ります。
あとは通常通り送信機側もバインドモードにしてバインド作業。
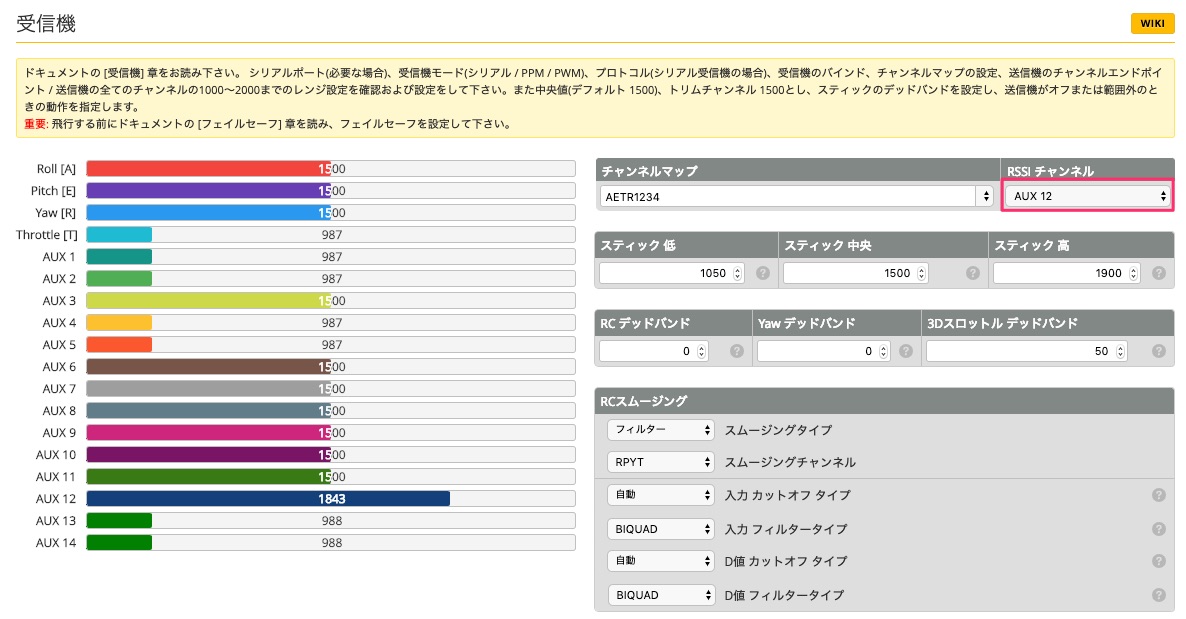
送信機とのバインドが完了したら、【受信機】タブのRSSIチャンネルをAux12に設定して完了です!
あとは機体を組み直して完了です!
キャノピー内に受信機を収めるにはスペース的に厳しいので、FCとフレームの間に収納しました。

まとめ!
これで200mW出力VTXにフルレンジレシーバーFrsky xm+という構成になりました。

あとは来週末辺りから遅れた盆休みが取れるのでガンガン飛ばしてあげましょー!
ということで、今回はこの辺で・・・。


 【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!
【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!  【Caddx Loris】重量10gの60fps 4Kカメラ『Caddx Loris』が登場!そして搭載機『iFlight Alpha A85』や『ANGER 85X 4K HD CineWhoop』が早くもリリース!
【Caddx Loris】重量10gの60fps 4Kカメラ『Caddx Loris』が登場!そして搭載機『iFlight Alpha A85』や『ANGER 85X 4K HD CineWhoop』が早くもリリース!  【FullSpeed TinyLeader】安定感抜群で飛ばしやすい!完成度の高いCine Whoop『FullSpeed TinyLeader HD』。
【FullSpeed TinyLeader】安定感抜群で飛ばしやすい!完成度の高いCine Whoop『FullSpeed TinyLeader HD』。  激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました!
激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました!  【Makerfire】Armor 85 HD 85mm Brushless FPV CineWhoop V2 レビュー!
【Makerfire】Armor 85 HD 85mm Brushless FPV CineWhoop V2 レビュー!  【FullSpeed TinyLeader】初期状態ではロックされているVTXのBandやChannel、送信出力を変更する方法!
【FullSpeed TinyLeader】初期状態ではロックされているVTXのBandやChannel、送信出力を変更する方法!  念願のCine Whoop『Beta85X HD』がやって来た!【BETAFPV】
念願のCine Whoop『Beta85X HD』がやって来た!【BETAFPV】  【FullSpeed TinyLeader】狭いスペースに何とかロスト防止用ブザーを取り付けることが出来ました!
【FullSpeed TinyLeader】狭いスペースに何とかロスト防止用ブザーを取り付けることが出来ました! 

いよいよ、外付けレジバー設置!フライト楽しみ!
一つ教えてください。この機体についてBanggood のページみとりましたら、トランスミッターに、Frsky NON-EU receiver Versionとありました。そういえば、mobula7の仕様見てたら、Frsky NON-EU receiver VersionとともにFrsky EU-LBTバージョンがありました!この違いはなんなんですか?良ければ、教えてください
(外部XM +受信機)