
標準で0802 25000KVモーター搭載の1セルブラシレスWhoop『HBFPV HB64 V5』、なかなかマニアックな機体です。
1セルブラシレスWhoopでいえばEachine US65やBeta65 Pro(1S)などは標準の0603モーターから0802モーターに変更することによりパワー&飛行時間が延びます!
現在2機あるUS65のうち1機は0802 17500KVモーター構成にしていますが、1セルブラシレスWhoopで0802モーターを使う場合このあたりのKV値がパワー&飛行時間の面で一番バランスが取れているように感じます。

そしてこのHBFPV HB64にはさらにKV値が高い25000KVモーターが標準で搭載されています。
KV値が高いモーターが使われているのでパワーがあるのは感じます。
しかし電費が非常に悪い!
室内飛行で260mAhバッテリー使用で1分半〜2分が限界です!(17500KVモーターでは4分近く飛びます!)
この飛行時間では普段の練習機としてはなかなか厳しく感じます。
しかしパワーがある分、室内アクロ飛行(フリップやロールなど)はやりやすくなる印象です。
使用用途が限定されそうですが、このKV値での飛行に慣れてくるとコース周回など速くなるのでしょうね!
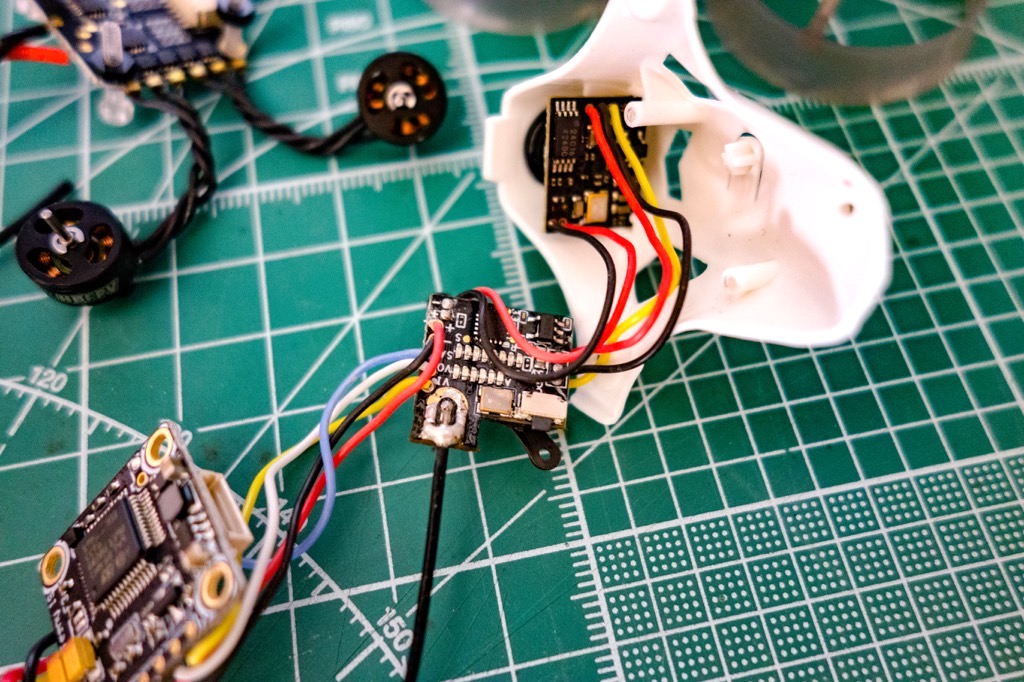
機体の内部構成も1セル機にしては少し複雑でメンテナンスなど機体をバラす際は少し手間がかかりそうですが、Toothpick化したりカスタマイズの面からいうと面白い機体だと思います。

何とか慣らしてやろうと飛ばしていますが・・・
今回この機体を飛ばせる状態にするまでのBetaflightの設定をやっていきます。
目次
【HBFPV HB64 V5】Betaflight設定をやってみる!
それではBetaflightの設定をやっていきます。

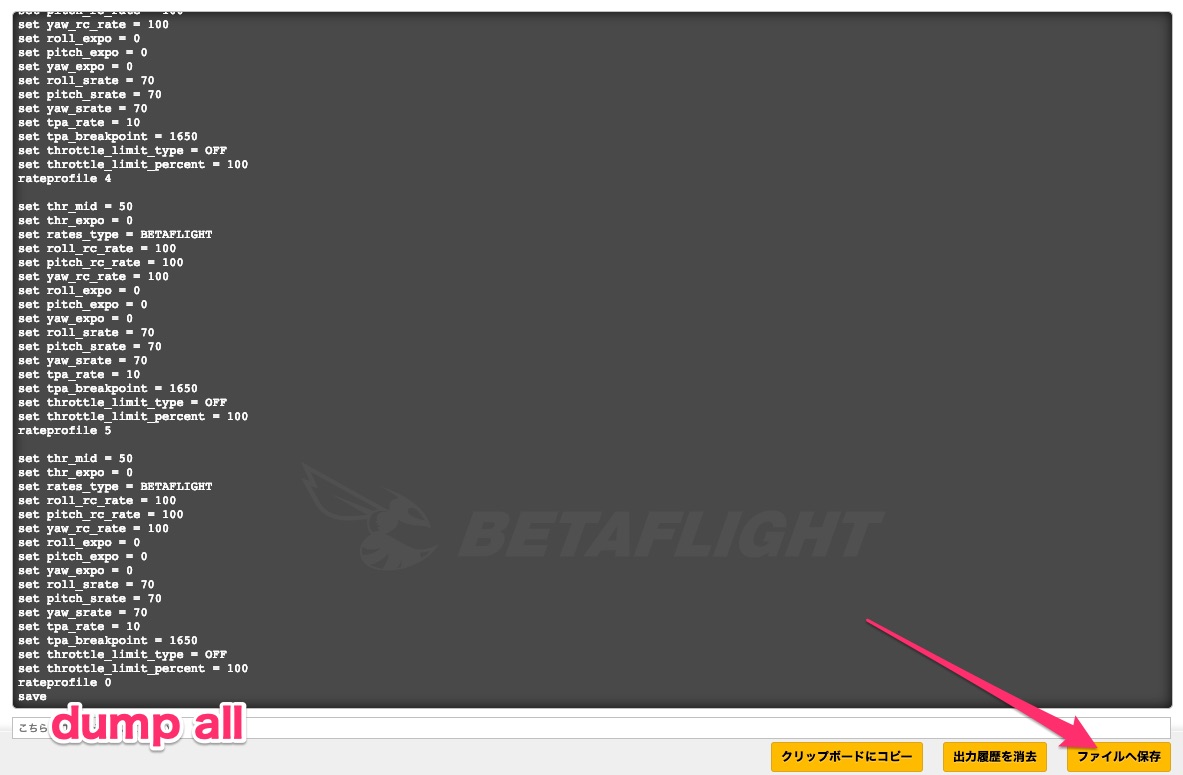
初期状態の設定を保存!
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
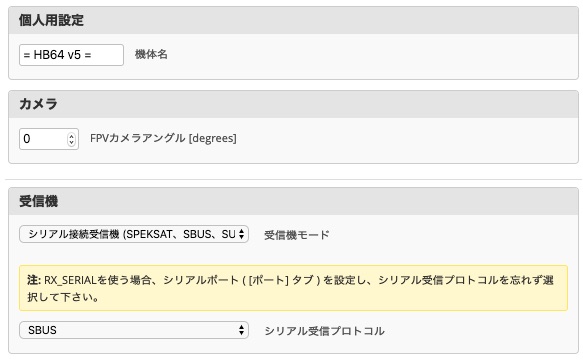
ポート設定!
[ポート]設定はデフォルト状態で特に問題なさそうですね。

基本設定!
アーム最大角はデフォルトで180°に設定されているので問題ないですね。
[モーター回転方向を逆転]設定に変更しました。
また、[MOTOR_STOP]をオフに変更。
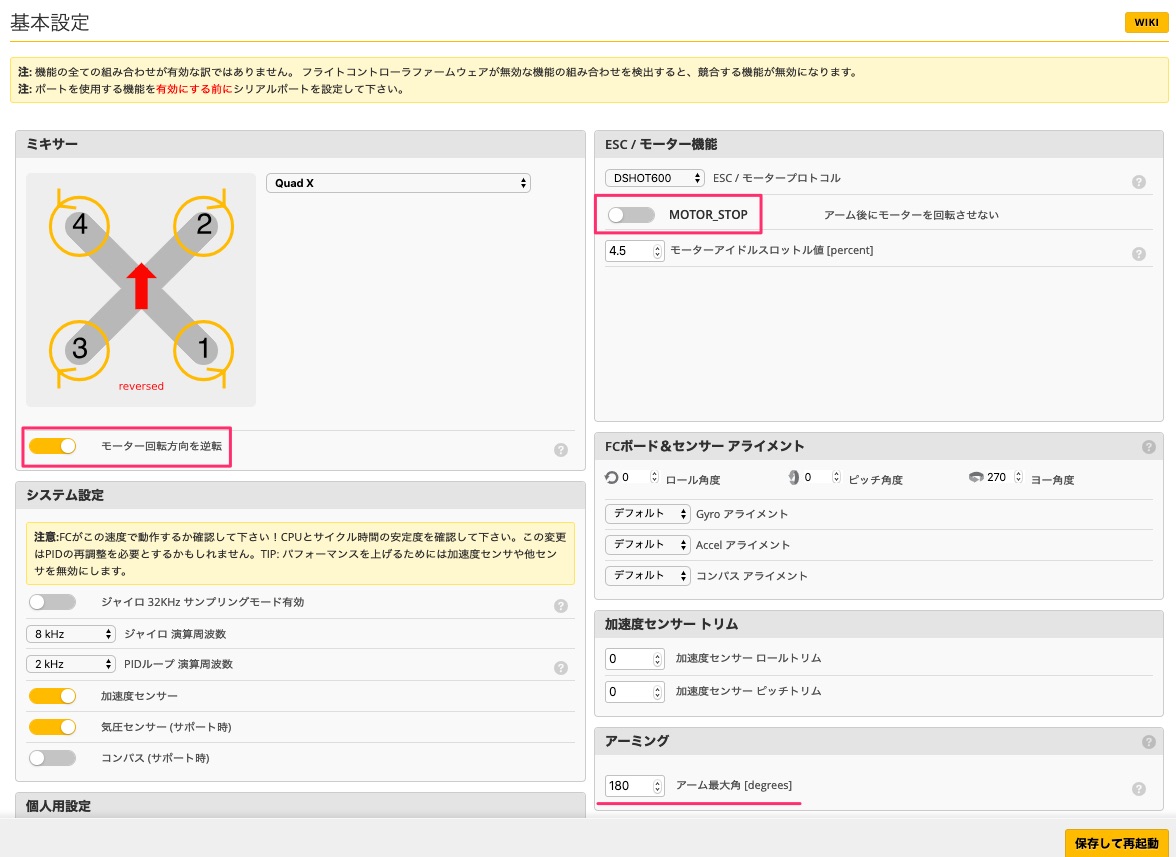

[Dshotビーコン設定]をオンに設定しました。
あとはデフォルトのままで問題なさそうです。

電源・バッテリー!
HVタイプのバッテリー使用がメインなので最大電圧の項目を4.3から4.5Vまで上げ、警告電圧を3.1Vまで下げました。

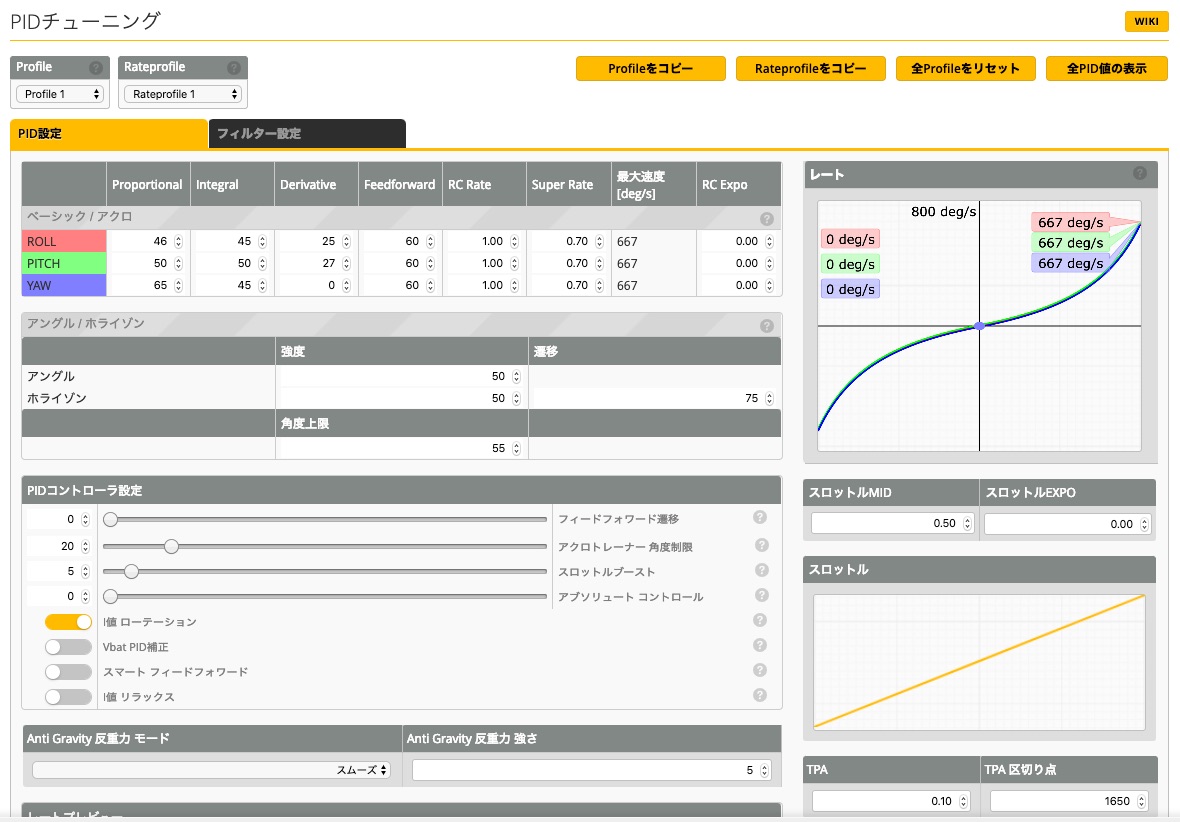
PIDチューニング!
PID・Rate Profileは1パターンのみとなっています。
このあたりの設定は普段飛ばされている機体を参考にお好みで!
機体とのバインド!
ここまできたら機体と送信機をバインドさせます。
ここではFrsky D8 Pro受信機で進めていきます。
Frsky D8 Pro受信機のバインドボタンを押した状態でバッテリーを接続することによりバインドモードに入ります。(緑のLEDが点灯状態になります)

受信機がバインドモードに入るとあとは通常通り送信機側もバインドモードで接続、バインドが完了すると受信機の緑LEDが点滅します。
バインドが完了したら一旦電源を切り、再び接続してBetaflight設定に戻ります。
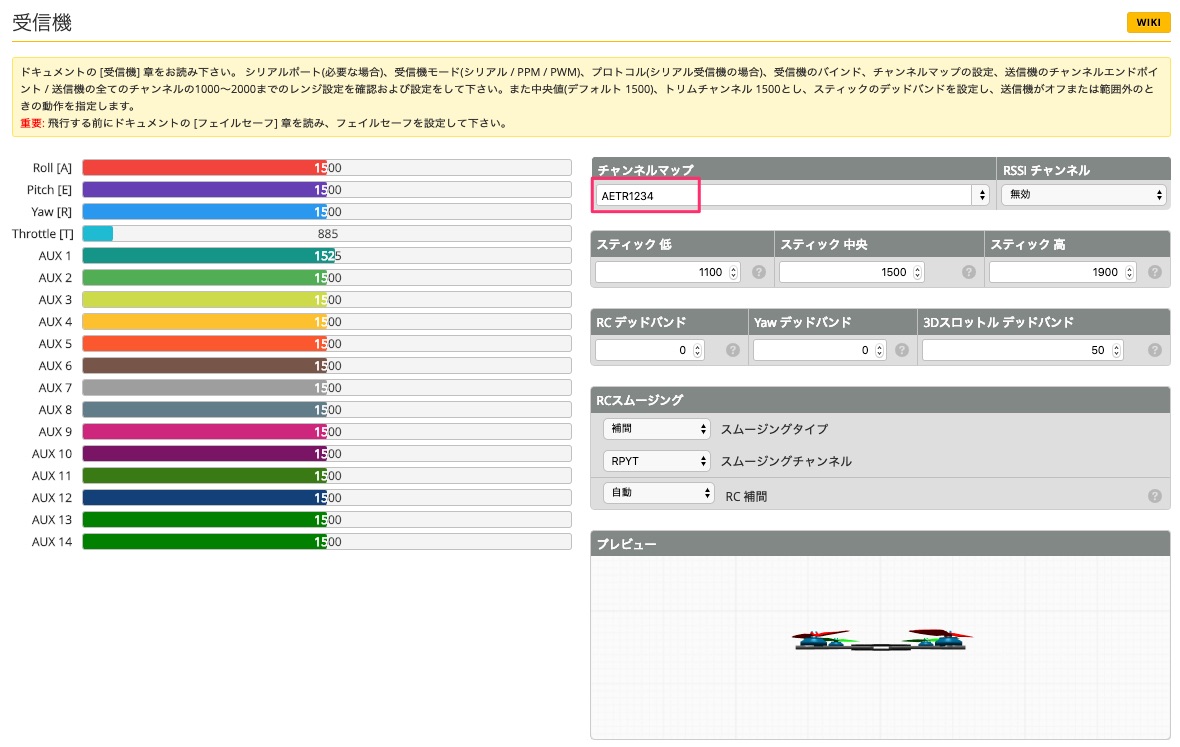
受信機!
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
チャンネルマップはAETR1234に設定して完了です。
D8 Pro受信機ではテレメトリは取れないようですね!
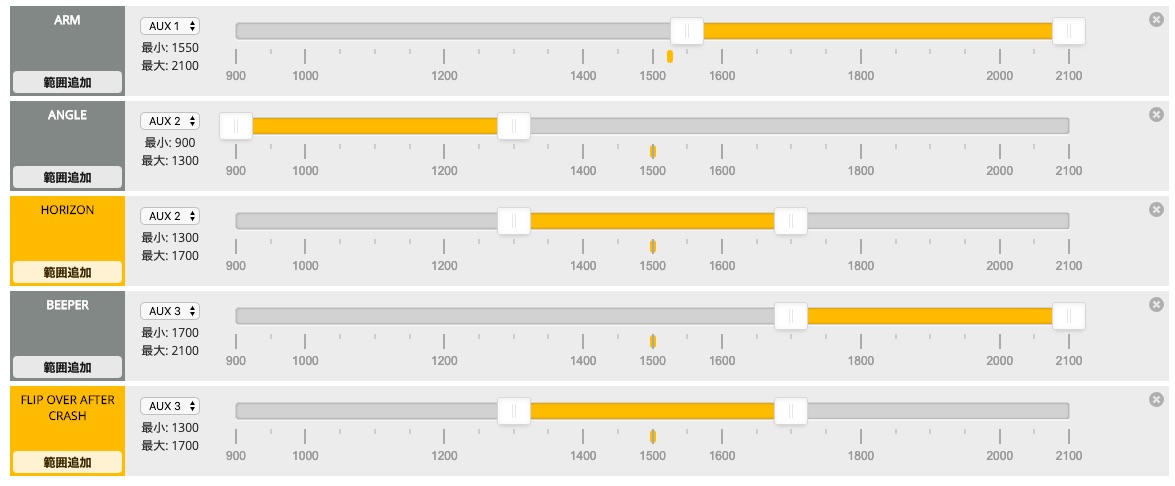
モード!
こちらがデフォルト状態で設定されている項目です。
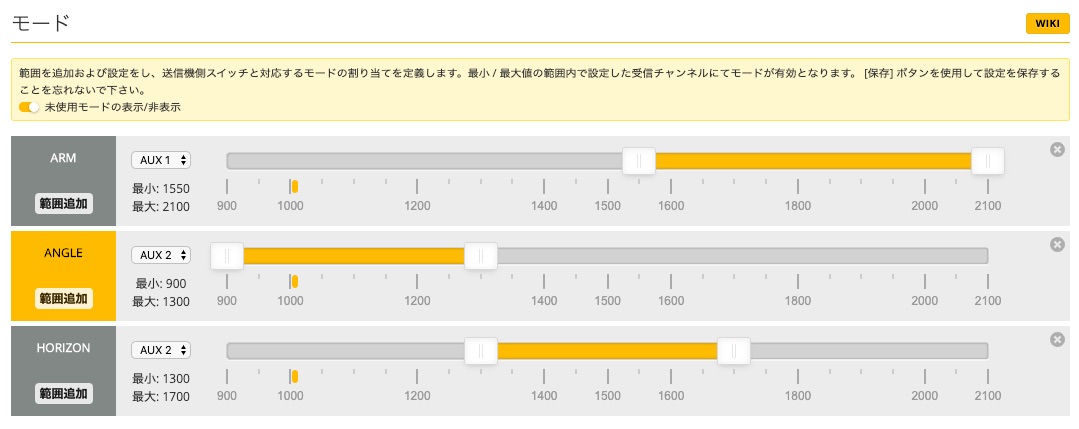
ブザー(BEEPER)とタートルモード(FLIP OVER AFTER CRASH)を追加しました。
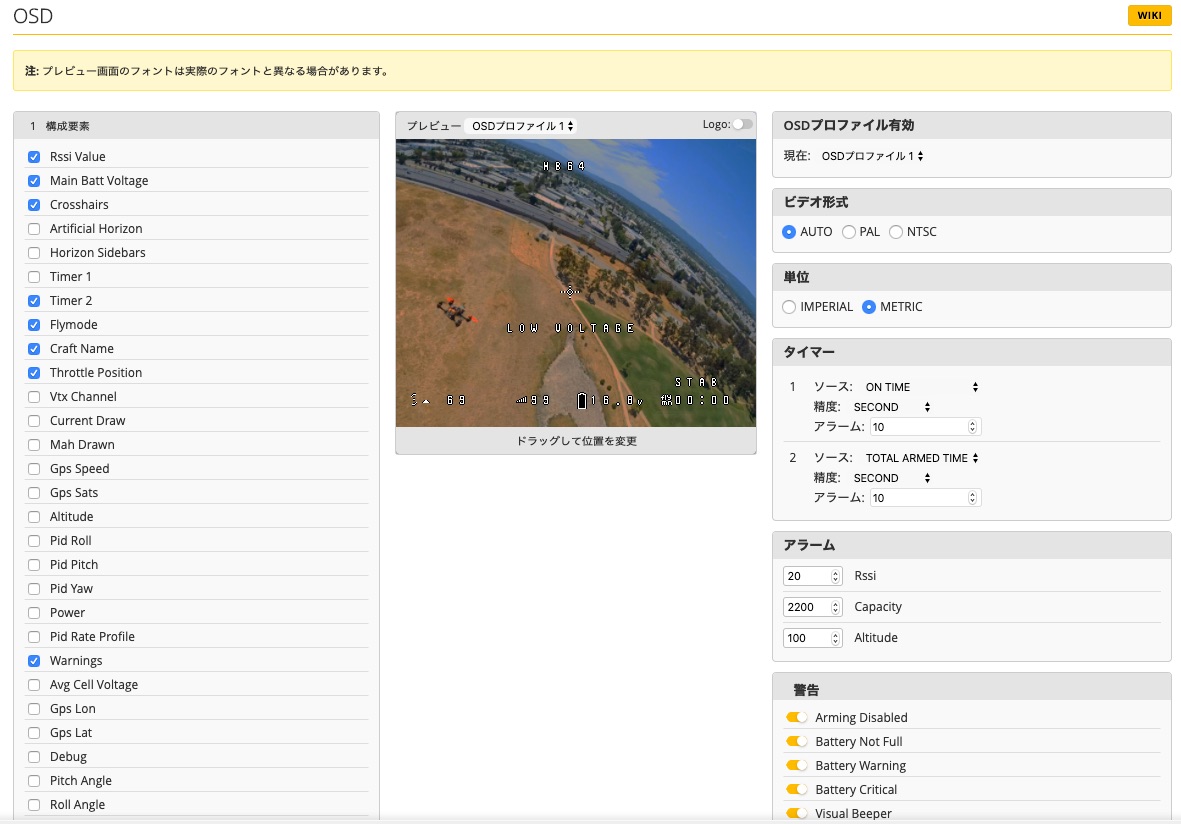
OSD!
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。
VTXのBand & Channelの設定!
いつもは【CLIコマンドライン】から設定していますが、上手く設定できなかったのでVTXの物理ボタンから直接設定しました。
設定データの保存!
ここまでくればBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップを取って完了です。
ペラの入れ替え & BLHeli設定!
[モーター回転方向を逆転]設定にしたのでまずはペラを入れ替えます。

次にBLHeliからモーターにReversed設定をかけます。
なぜか3番モーター(ESC 3)のみリバース設定がされていました。(モーターの配線の問題?)

このデフォルトの状態から全て反転設定にさせます。(Normal→Reversed Reversed→Normal)
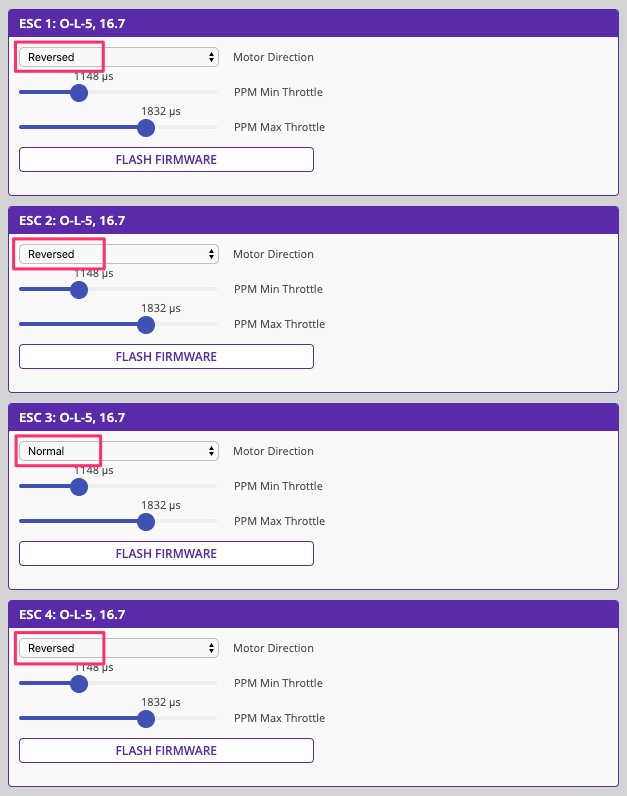
以上で設定完了です!
まとめ!
1セルブラシレスWhoopは、0603 19000KVモーター機と0802 17500KV機、そしてこのHB64の0802 25000KVと3機体制で現在楽しんでおります。
比べてみるとその飛びの違いが体感でき、またペラの変更による飛びの違いと・・なかなか面白いものです!

前々から気になっていた1セル機での25000KVモーターの飛びなんですが、ちょっと試してみたい場合は既存の機体にモーターだけ載せ換えるのが手っ取り早いのですが、構成が面白い機体なのでフレームのサイズアップやToothpick化などカスタマイズさせるには面白そうな機体です。
その前にこの25000KVモーターになかなか慣れずにいます・・・。



コメントを残す