
前回『【EMAX Tinyhawk Freestyle 115mm】とにかく飛びが軽くて飛ばしやすいToothpickです!』の続きとなります。
2セルToothpick『Emax Tinyhawk Freestyle』カッコいいですねぇ!
そして飛びがマイルド(表現が?)なのも飛ばしやすくていい!
1103 7000KVモーターが使われていますが、2セル機にしては他の同サイズのToothpick機と比べると少しKV値が低いものが使われている感じです。
これがこの飛びへとつながっているのかな?
手裏剣ペラ(EMAX AVAN Rush2.5インチペラ)が関係しているのか?
このあたりよく分かりませんが、Toothpick初心者(ドローン自体初心者ですが)の私には飛ばしやすい印象です。
Toothpickと言えば、初めて飛ばしたSailfly-Xでの初3セル飛行ではあまりにもぶっ飛びすぎてお漏らししかけたのを覚えています。
この『Emax Tinyhawk Freestyle』は2セル機となりますが、過度な飛びをすることなく扱いやすいのでToothpick初心者の方にはいいかもしれませんね!(それでもスピードはかなり出ますよ!)

数回飛ばした感じだとこれから長らく楽しめそうな機体ですが、いろいろと不満点もあります。
1セルバッテリー2本を直結して2セルとして飛ばす機体ですが、1セルバッテリーは普段Whoopで使っている250〜300mAhくらいの容量のものしかなく(300mAh×2本でも3分近く飛んでくれたので問題ないのですが)、この機体のためだけに新たに大きな容量のバッテリー(付属の450mAhバッテリーで4〜5分近く)を用意するのも・・・。
ピッグテールをXT30プラグに交換して2セルバッテリーでの運用が私的には扱いやすいのですが、2セル機で(5A ESC)で問題ないのか?このあたりも少し心配だし・・・。
あと、プラグコードが出ているタイプの1セルバッテリー(名前が?)では飛行中にペラに接触しプラグごとすっ飛んでいき墜落なんてこともありました。(完全に不注意です!)


目次
【Emax Tinyhawk Freestyle 115mm】バインドからBetaflight設定 & ブザーの取り付け!

ブザーの取り付け!
まずはブザーの取り付けをやっていきます。
これは前回、機体を解体して内部構成をチェックした際にやったのでこちらも参考にしてみて下さい。

トッププレートを外すだけでFC上のブザーポートにアクセスできるので取り付けは簡単です。
はんだ付けの際、シュリンクチューブで固定されたVTXのアンテナが邪魔になってくるのでいったんチューブを外した方が作業はしやすいかと思います。
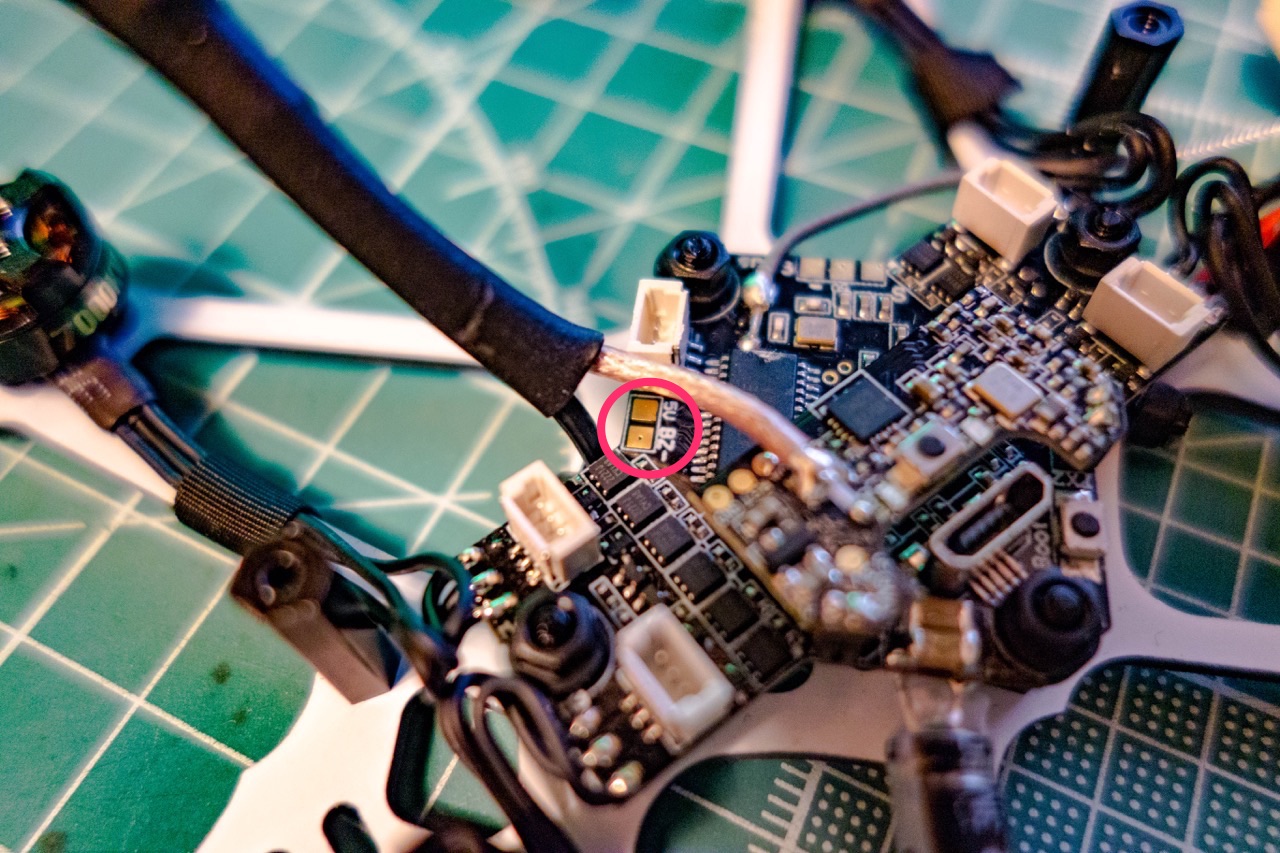
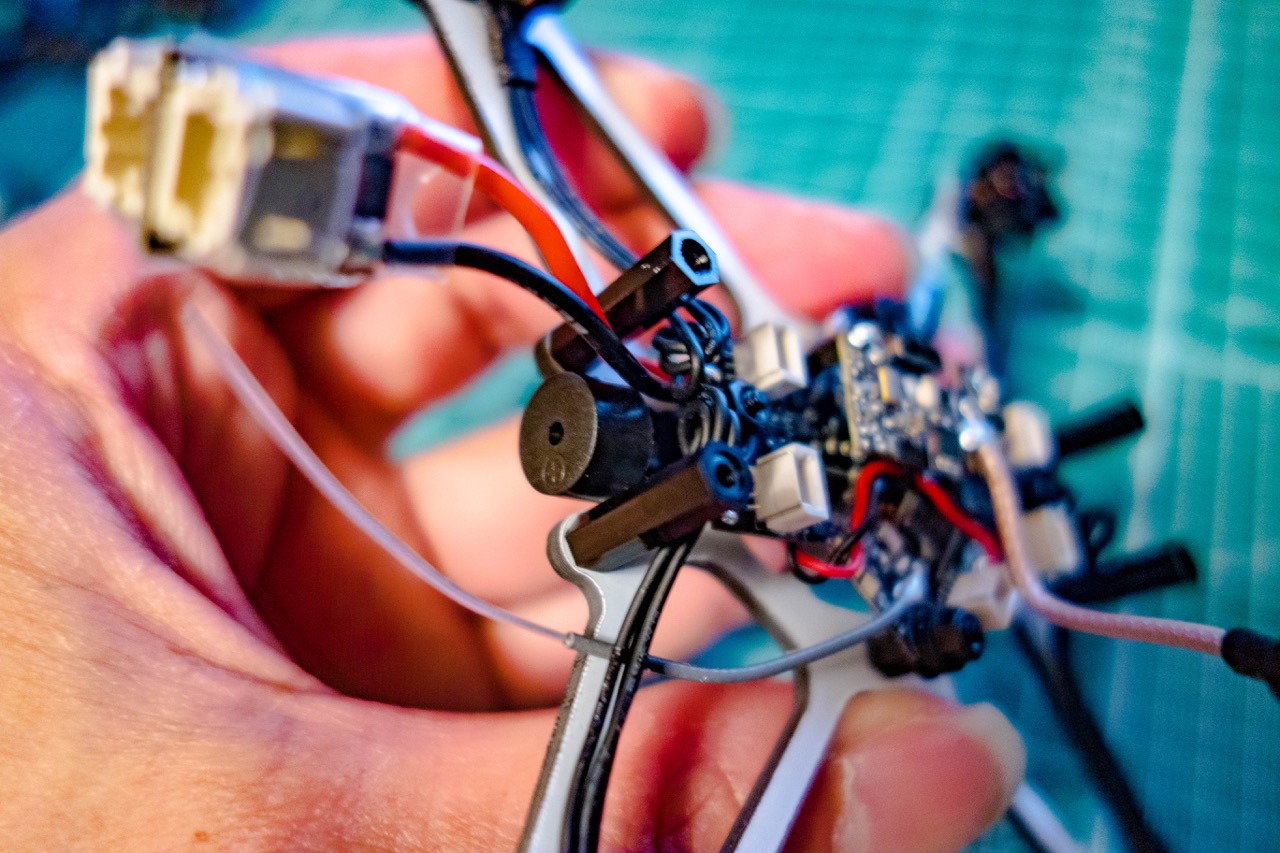
そしてブザー本体はFC(メインボード)を固定している機体後部のスペーサーに挟む感じで設置すると綺麗に収まります。
Betaflight設定 & バインド作業!
Betaflightの設定をやっていきますが、ほぼデフォルトの状態で問題なく飛ばすことができました。
細かいPIDやRates等の設定はお好みで変更して下さい!
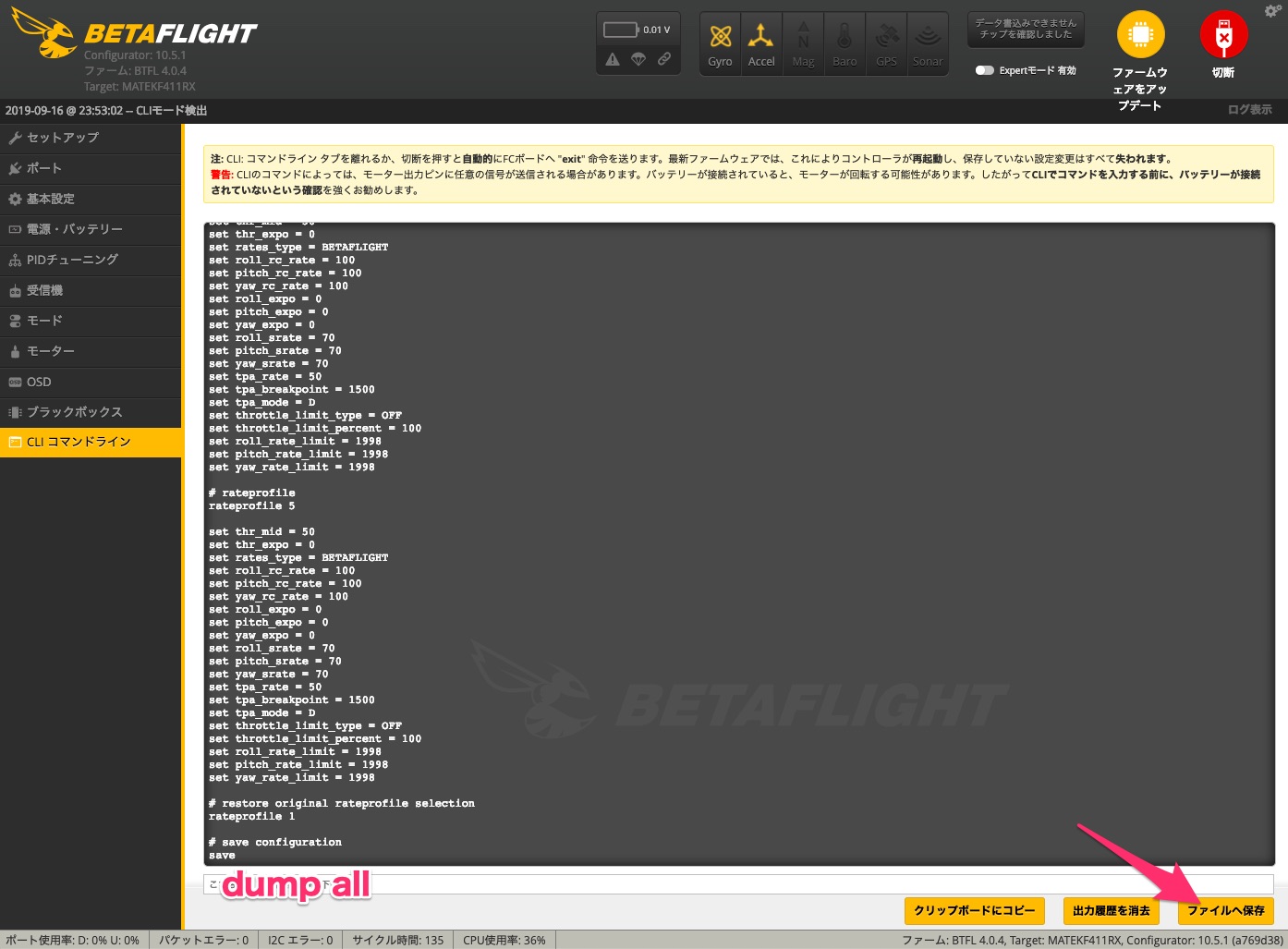
初期状態の設定を保存!
まずは[CLIコマンドライン]から【dump all】で初期状態の設定を保存しておきます。
ポート設定!
ポート設定はデフォルト状態で特に問題なさそうですね。

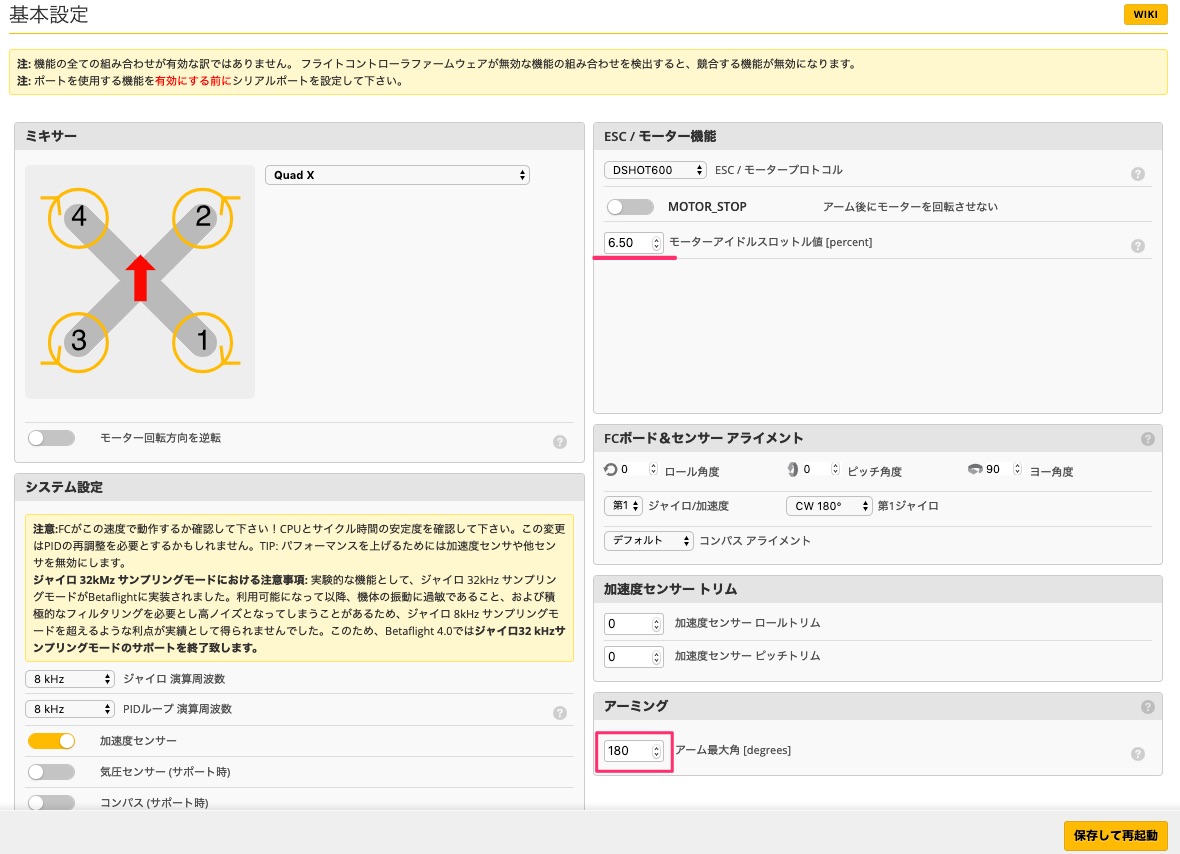
基本設定!
Whoopではプロップウォッシュ対策としてモーター回転方向を逆転させる設定をしていましたが、Toothpickでは必要あるのでしょうか?
今回デフォルト状態のままにしておきました。
モーターアイドルスロットル値をデフォルト値の4.0から6.5に変更。
こちらはお好みで!
[アーム最大角]をデフォルトの50°から180°に変更しました。
受信機設定は[FRSKY_X(D16モード)]に変更しました。
[エアーモードを常時使用」はデフォルトでONになっています。

[Dshotビーコン設定]がOFFになっていたのでON設定に変更しました。

あとはデフォルトのままで問題なさそうですね。
電源・バッテリー!
バッテリー容量を450mAhとしました。
電圧設定は数回飛ばして微調整していきたいと思いますが特にデフォルト値で問題なさそうです。

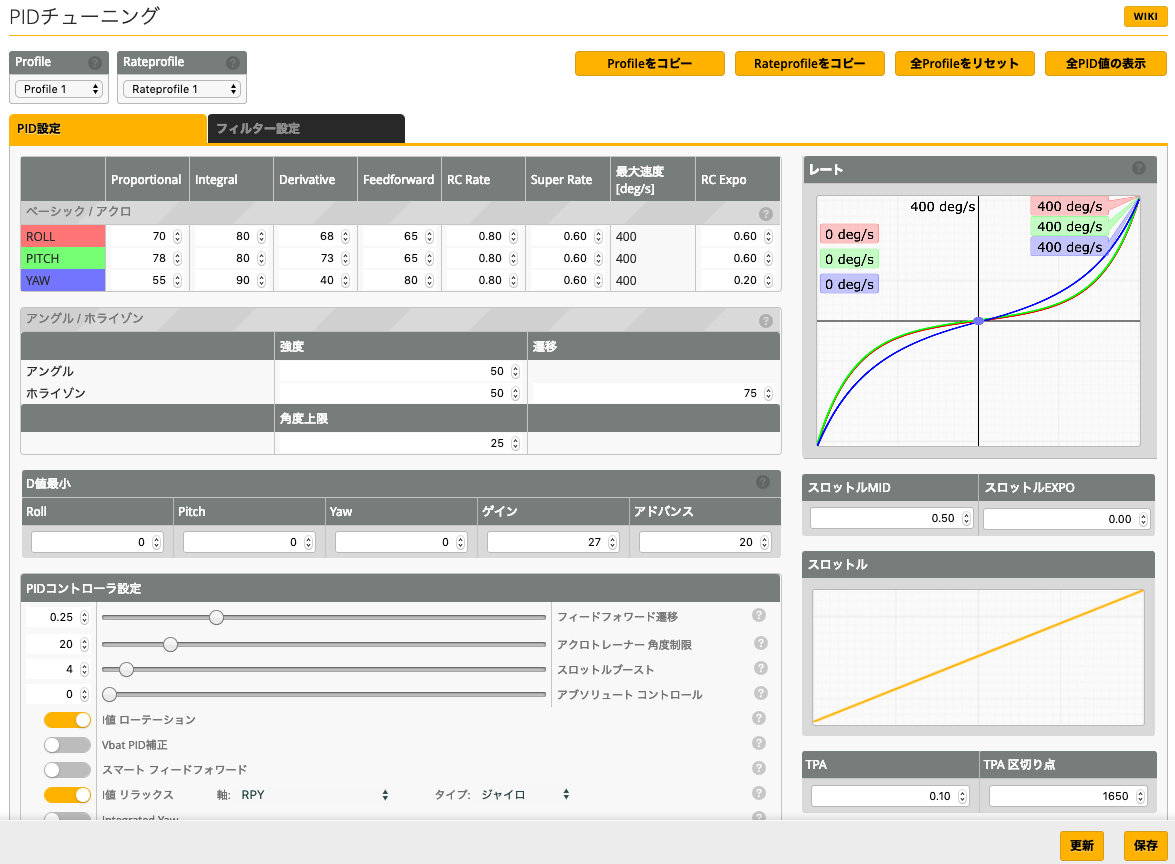
PIDチューニング!
デフォルトで3種類のPID/Rate Profilesが用意されています。
PIDやRate設定はお好みで!
機体とのバインド!
ここまで設定できたら機体と送信機をバインドさせます。
USB接続の給電でバインド作業は可能です。
機体底面のバインドボタンを押しバインドモードに入ります。
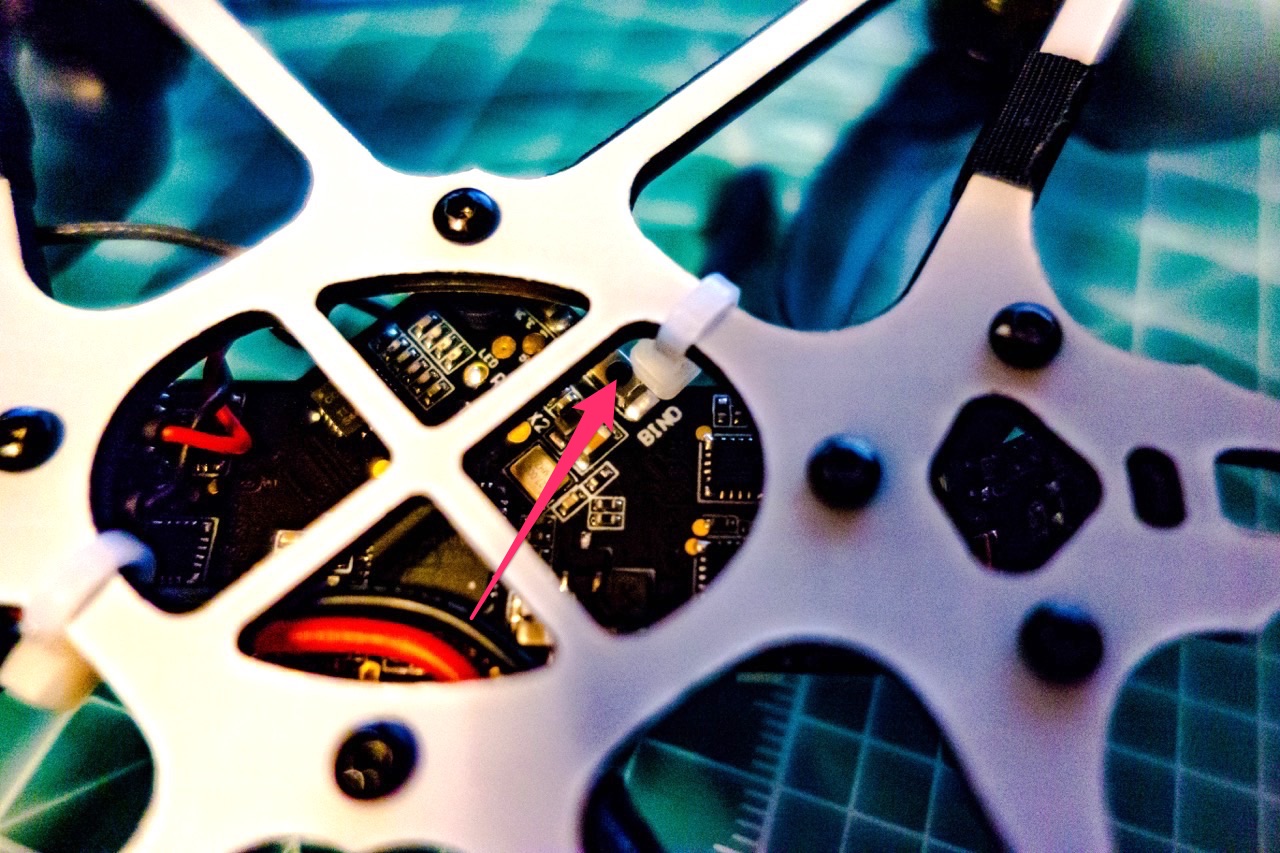
あとは送信機との通常作業なので問題ないですね!
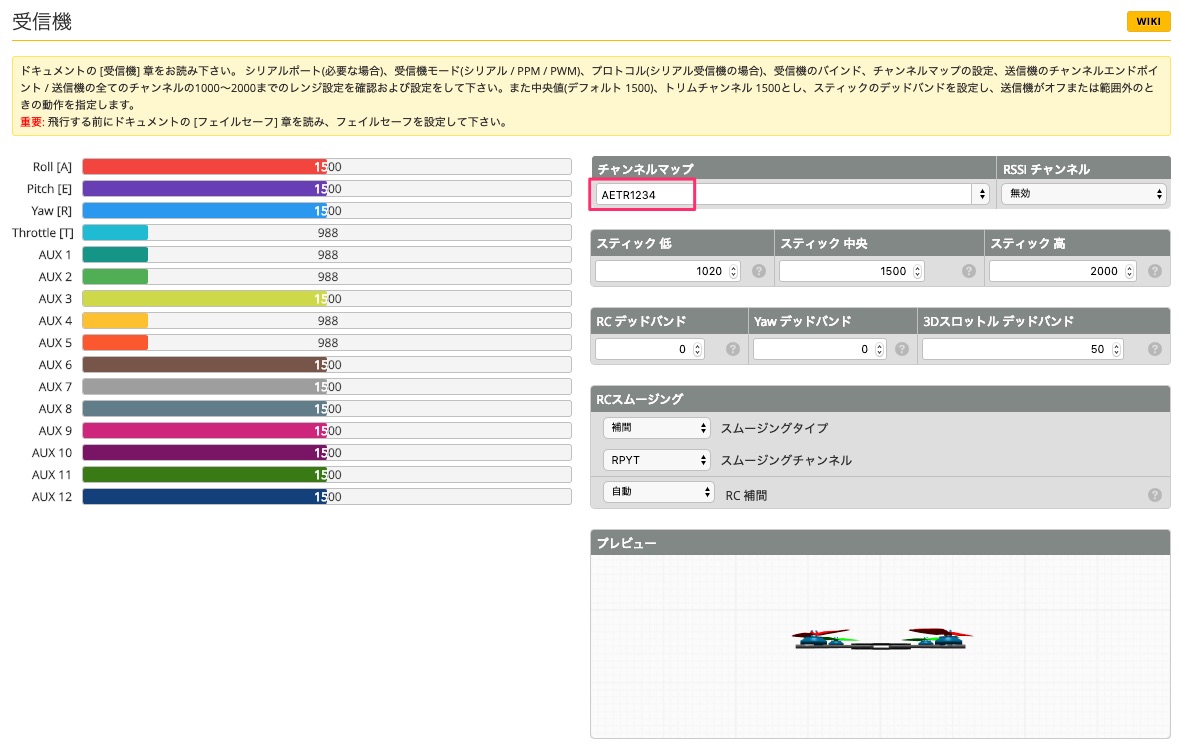
受信機!
送信機とのバインドが完了したら次に[受信機]タブへと移ります。
チャンネルマップを[AETR1234]に変更して完了です。
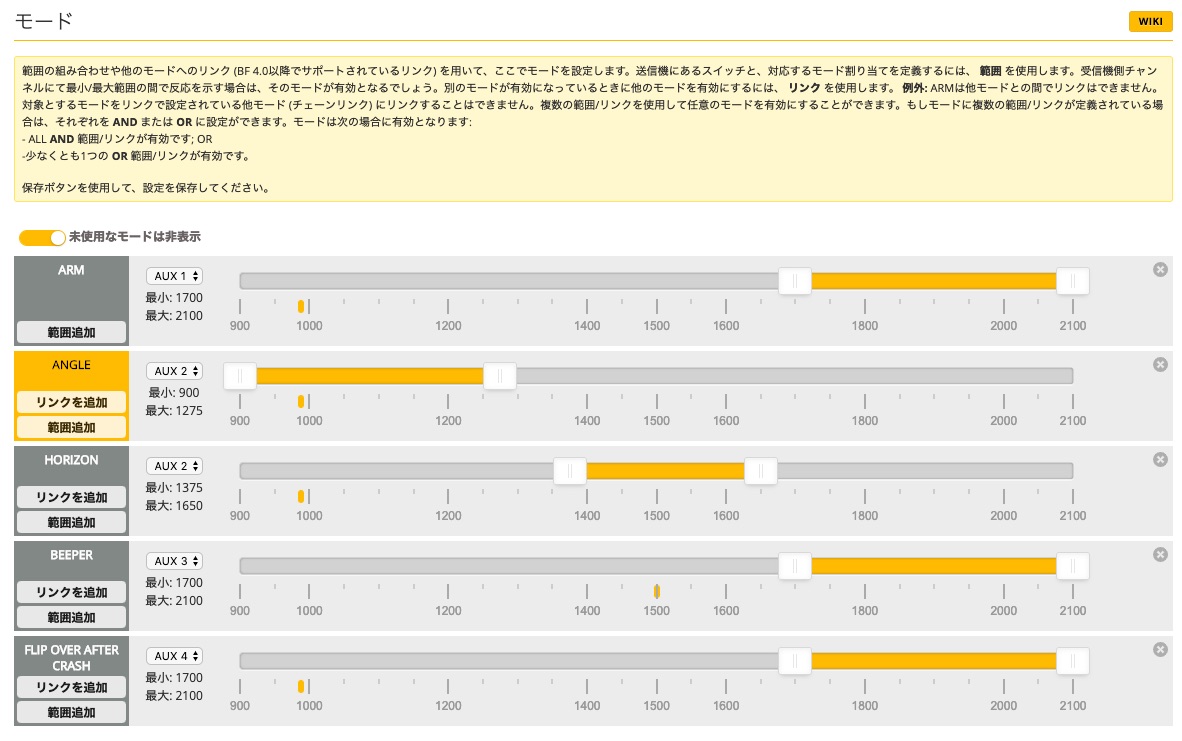
モード!
デフォルト状態で最低限の設定がされているので問題なさそうですね。
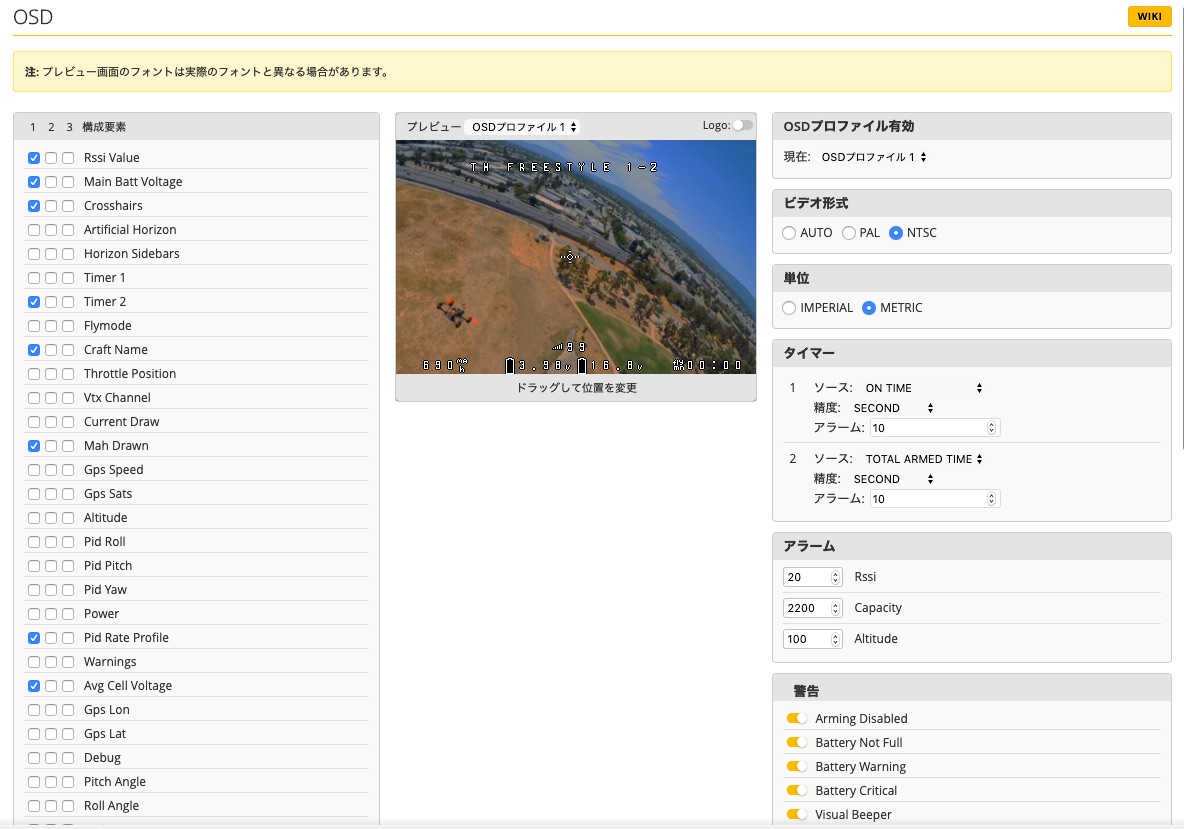
OSD!
こちらもお好みで設定して下さい。
いつも私はこんな感じで設定しています。
VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきましょう。
マニュアルにも書いてあるのですが、搭載されているVTXは初期状態ではロックがかけられているようです。
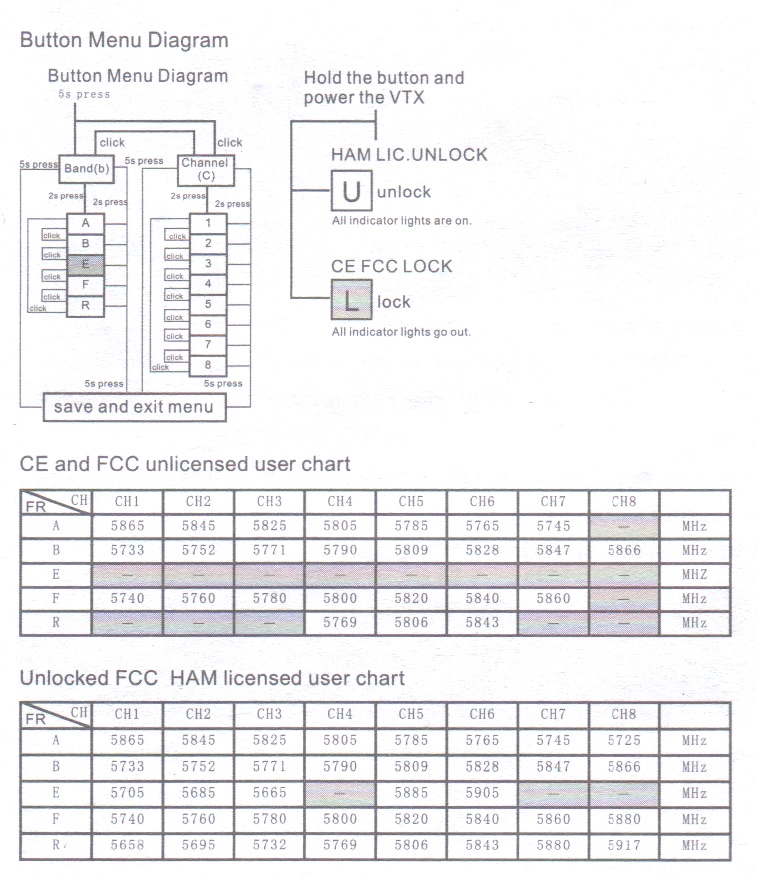
まずはこのロックを解除しないとVTXのBandやChannelの設定が出来ないようなので(使えない周波数がある)解除します。
作業は簡単で、VTX基盤上にあるスイッチを押した状態でバッテリーを接続すればLEDが点滅してロックが解除されます。(USB給電ではなくバッテリーを接続してください!)

ロックが解除されたら周波数の設定をしていきますが、5秒長押しで設定を保存や2秒押しで次の項目などVTXの物理ボタンで設定するのは少しめんどくさい操作が必要なので、ロック解除後は[CLIコマンドライン]から設定した方が簡単です。
set vtx_channel=1
set vtx_freq=5705
save
設定データの保存!
ここまでくればBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を[CLIコマンドライン]から保存しておきます。
【diff all】で差分バックアップを取って完了です。
こんな感じでEmax Tinyhawk Freestyleを飛ばせる状態に設定できました。
あとはご自分の好みやスキル等に応じて設定していけばいいかと思います。
超カッコいい見た目から裏切られることなく飛ばしやすくよく飛んでくれる・・・いい相棒がまた1つ増えました。

 名機Emax Tinyhawk Ⅱ FreestyleにRTFモデルが登場!
名機Emax Tinyhawk Ⅱ FreestyleにRTFモデルが登場!  Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!
Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!  お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!
お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!  【Emax Tinyhawk Freestyle】バッテリーのマウントはトップ or ボトム?結局どっちがいいのだろうか?
【Emax Tinyhawk Freestyle】バッテリーのマウントはトップ or ボトム?結局どっちがいいのだろうか?  勝手にTop3!今年ハマったWhoopくんランキング2019!
勝手にTop3!今年ハマったWhoopくんランキング2019!  【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!
【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!  【Emax Tinyhawk Freestyleまとめ!】大好きすぎて限定クーポン発行してもらいました!
【Emax Tinyhawk Freestyleまとめ!】大好きすぎて限定クーポン発行してもらいました!  【Emax Tinyhawk Freestyle】RunCam Nano2やCaddx Turbo EOS2カメラがマウントできる3Dプリントパーツが発売されましたね!
【Emax Tinyhawk Freestyle】RunCam Nano2やCaddx Turbo EOS2カメラがマウントできる3Dプリントパーツが発売されましたね!  久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  【BETAFPV HX100】手持ちの余ったパーツでサクッとHX100を組んでみました!簡単に組めるのによく飛んでくれます! 名機Emax Tinyhawk Ⅱ FreestyleにRTFモデルが登場! 勝手にTop3!今年ハマったWhoopくんランキング2019!
【BETAFPV HX100】手持ちの余ったパーツでサクッとHX100を組んでみました!簡単に組めるのによく飛んでくれます! 名機Emax Tinyhawk Ⅱ FreestyleにRTFモデルが登場! 勝手にTop3!今年ハマったWhoopくんランキング2019!  1セルToothpickが楽しくて構成変えてもう1台作ってみました。軽量2セルや3セル機としても面白そうです!
1セルToothpickが楽しくて構成変えてもう1台作ってみました。軽量2セルや3セル機としても面白そうです!  気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】
気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】  初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました! 【Emax Tinyhawk Freestyleまとめ!】大好きすぎて限定クーポン発行してもらいました!
初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました! 【Emax Tinyhawk Freestyleまとめ!】大好きすぎて限定クーポン発行してもらいました! 

コメントを残す