
前回『【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】』の続きとなります。
今日はせっかくの休みなのにあいにくの雨でドローンくんを飛ばしに行けない!
もう今組んじゃうしかないだろうということでToothpickを1機組んでみました。
『Eachine Tyro69 115mm』という機体ですが、完成機ではなく必要なパーツが同封されていて自分で組み上げるToothpick DIYキットとなっています。
自分で組み上げる手間はかかりますが、その分価格も大変リーズナブル!
前回、同封されているパーツを見ていきましたがスペックもそこそこ(高い?)なので部品取りにもいいかもしれませんね。

また今回はじめてこのようなキットを使い機体を1から組んでみましたが、工作好きにはもってこい、メチャ楽しかったです!
そしてモーターの配線やパーツの配置などいろいろ勉強できました。
途中ちょっとしたトラブルがあり組み上げるのに時間がかかってしまいましたが、慣れている方なら1時間ほどあれば作れちゃうと思います。
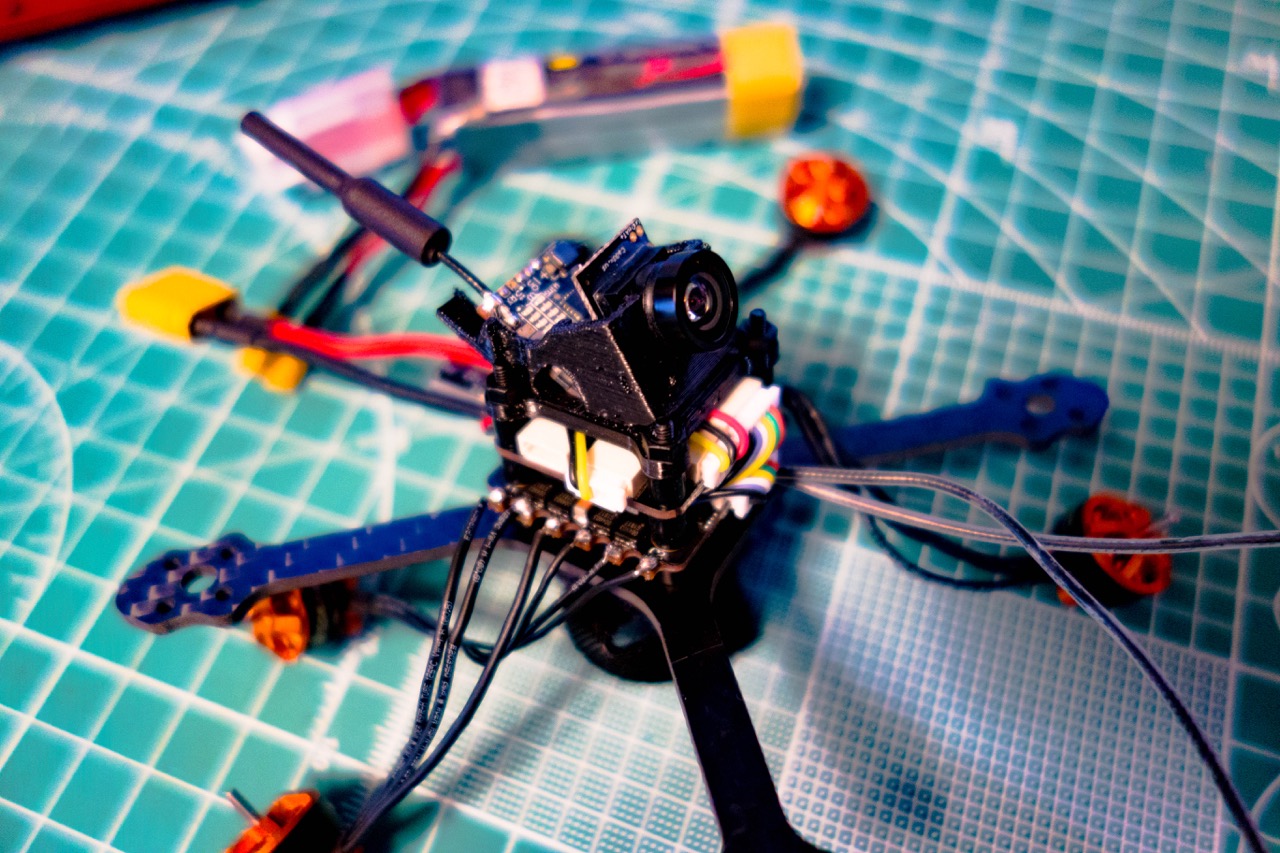
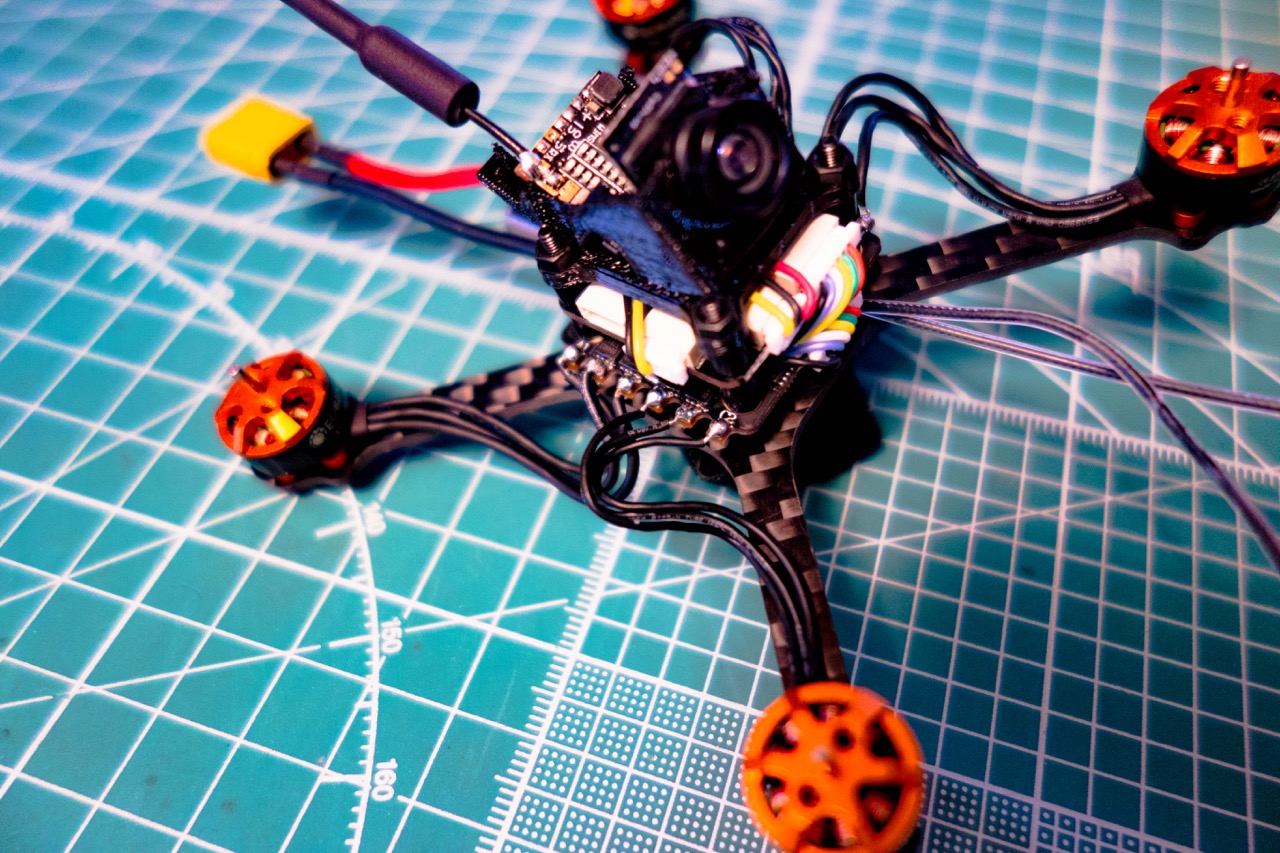
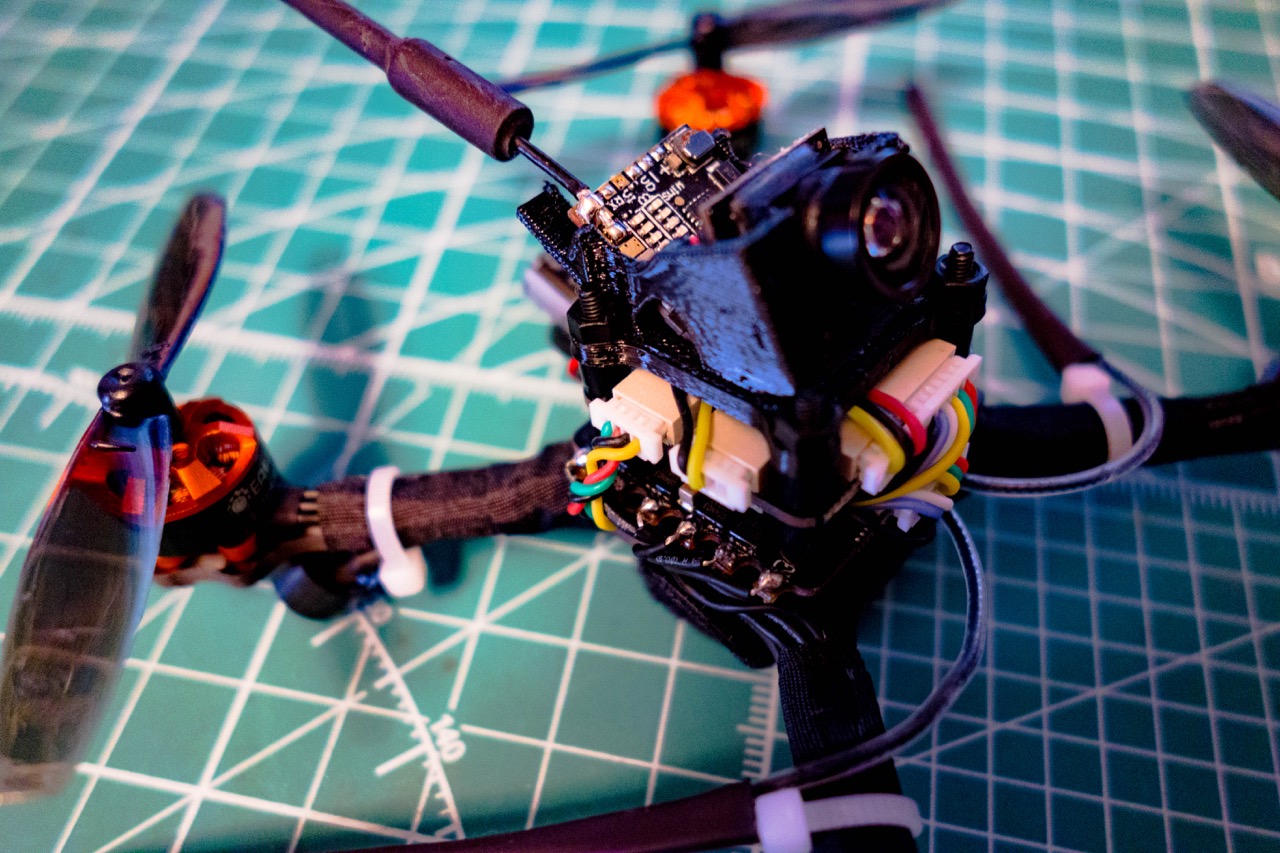
とりあえず完成した機体を先にご紹介!
なかなか綺麗に組み上がりました。

Betaflightの設定をしてまだ室内テストのみですが、コイツも飛んでくれますよきっと・・・
Toothpickはパワーがありすぎるので、ちゃんと浮いて正常に動くのか?程度のテストしか室内でできないのが痛いですね。
この状態で野外で飛ばすとあれっ?なんてのが最近結構あります。
それでは組んでいきますよ!
Eachine Tyro69 105mm F4 OSD 2.5 Inch 2-3S DIY FPV Racing Drone PNP w/ Caddx Beetle V2 1200TVL Camera

【Eachine Tyro69】機体を組み上げる!
それでは機体を組んでいきます。
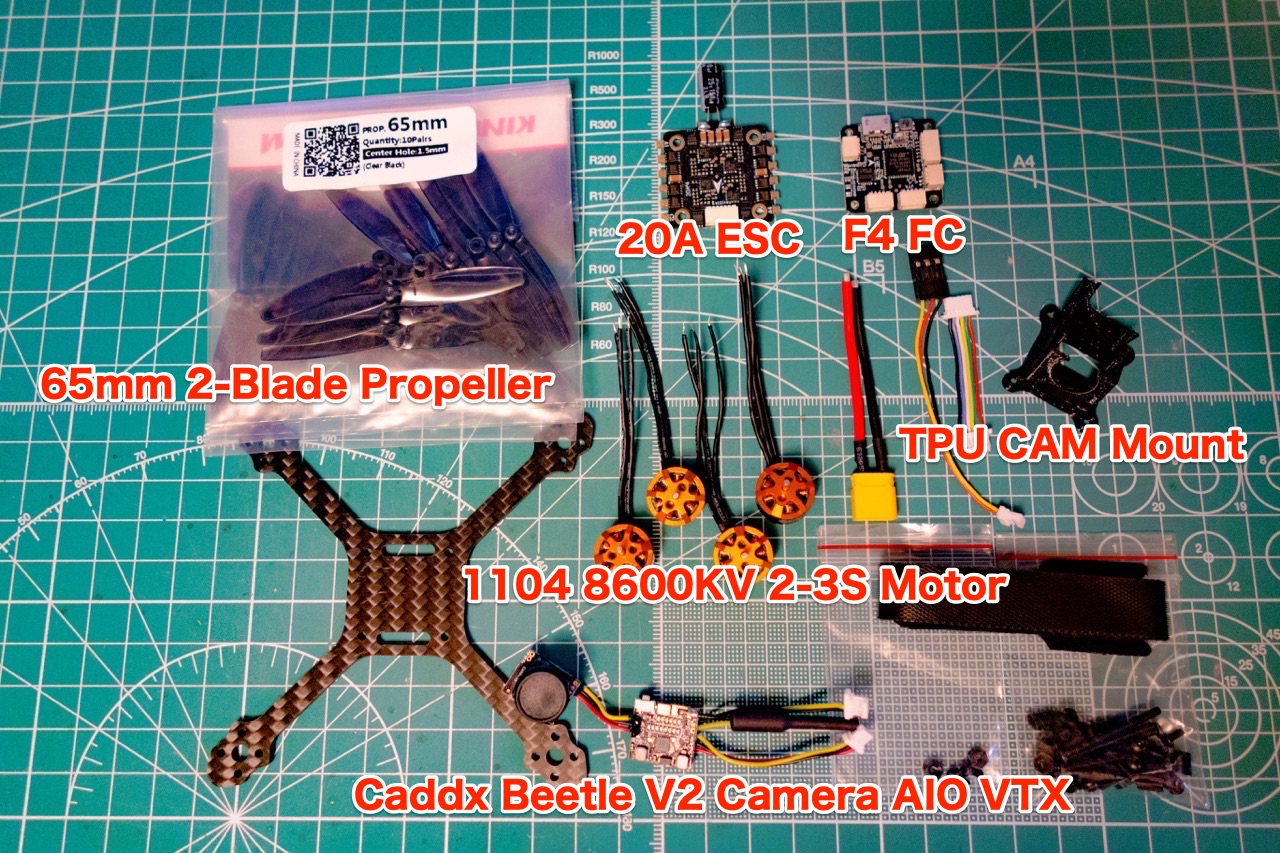
同封されている全パーツはこちらとなります。
とりあえずパーツのはんだ付けからやっていきました。
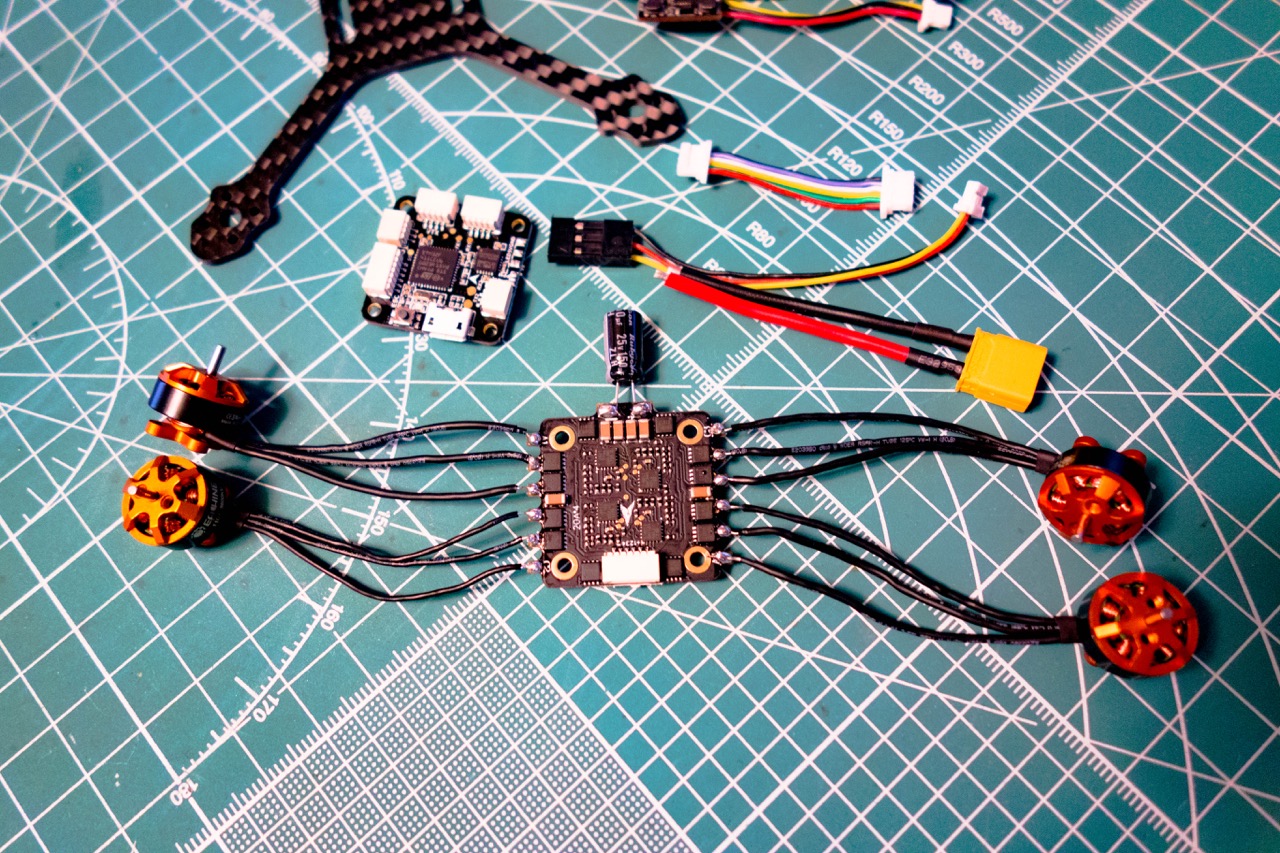
フレームにESCとモーターをマウントさせ配線の取り回しを考慮してケーブルを最適な長さにカットしてからはんだ付けした方が良かったです。
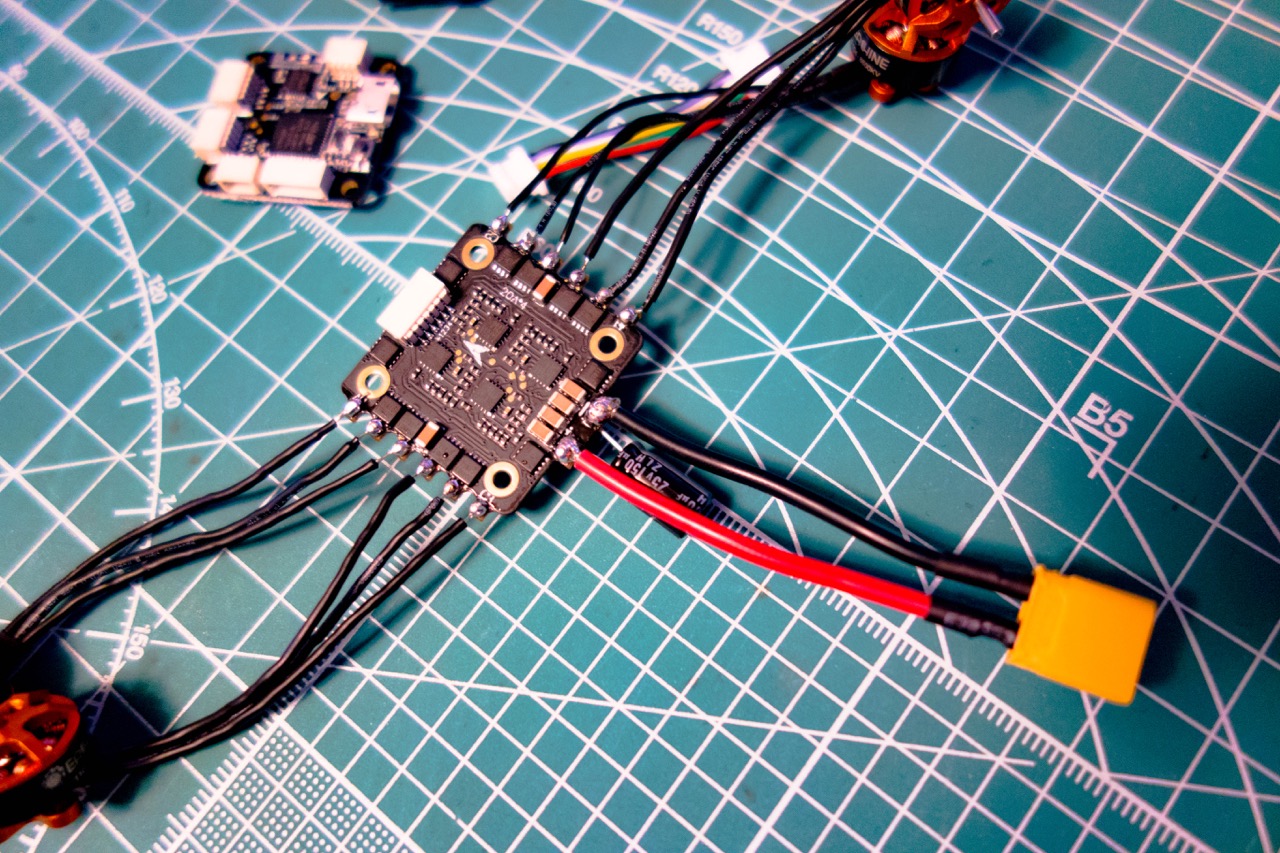
まずはESCにモーターを接続していきます。
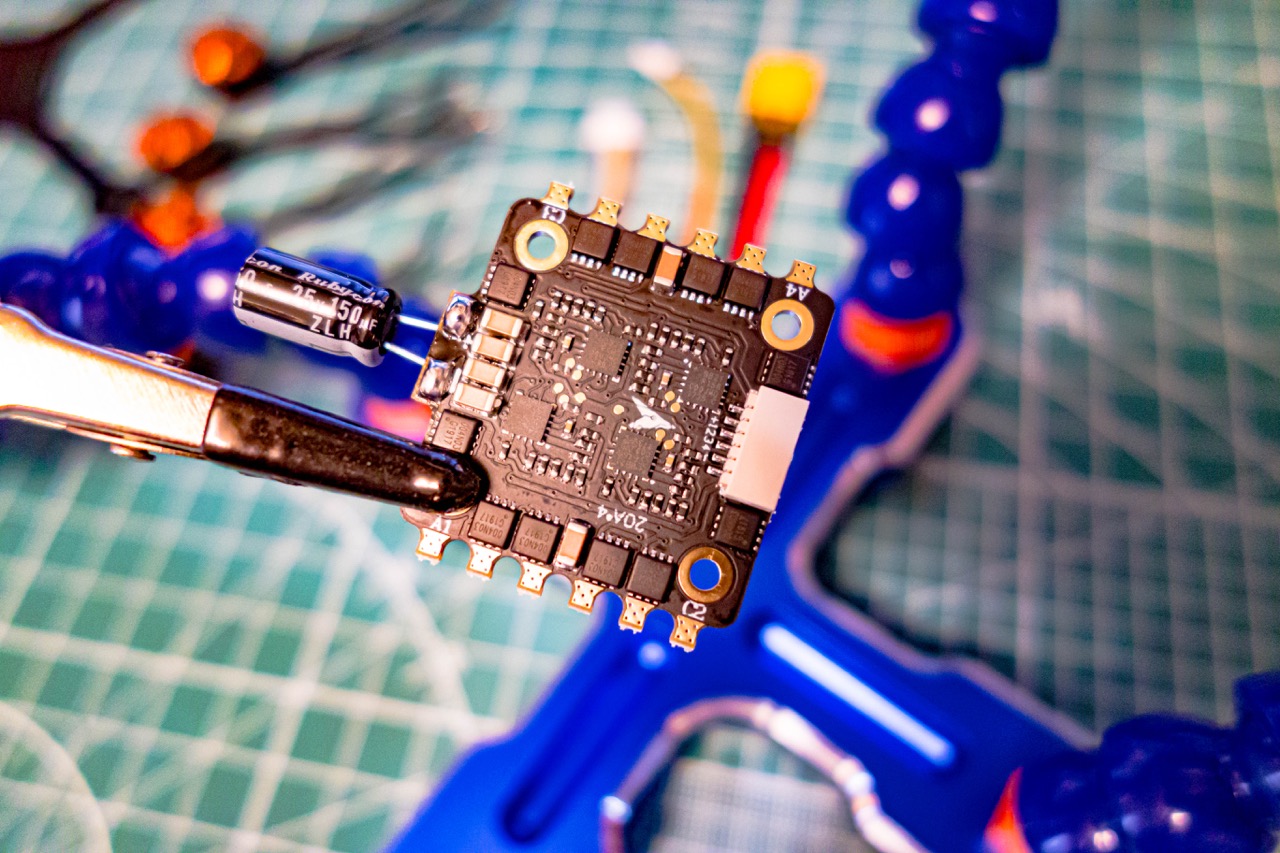
ESCに予備ハンダをしておきモーターを付けちゃいます。

これ多分失敗例。
最終的にフレームにマウントさせる際にケーブルが長すぎました。
そしてXT30プラグを付けます。
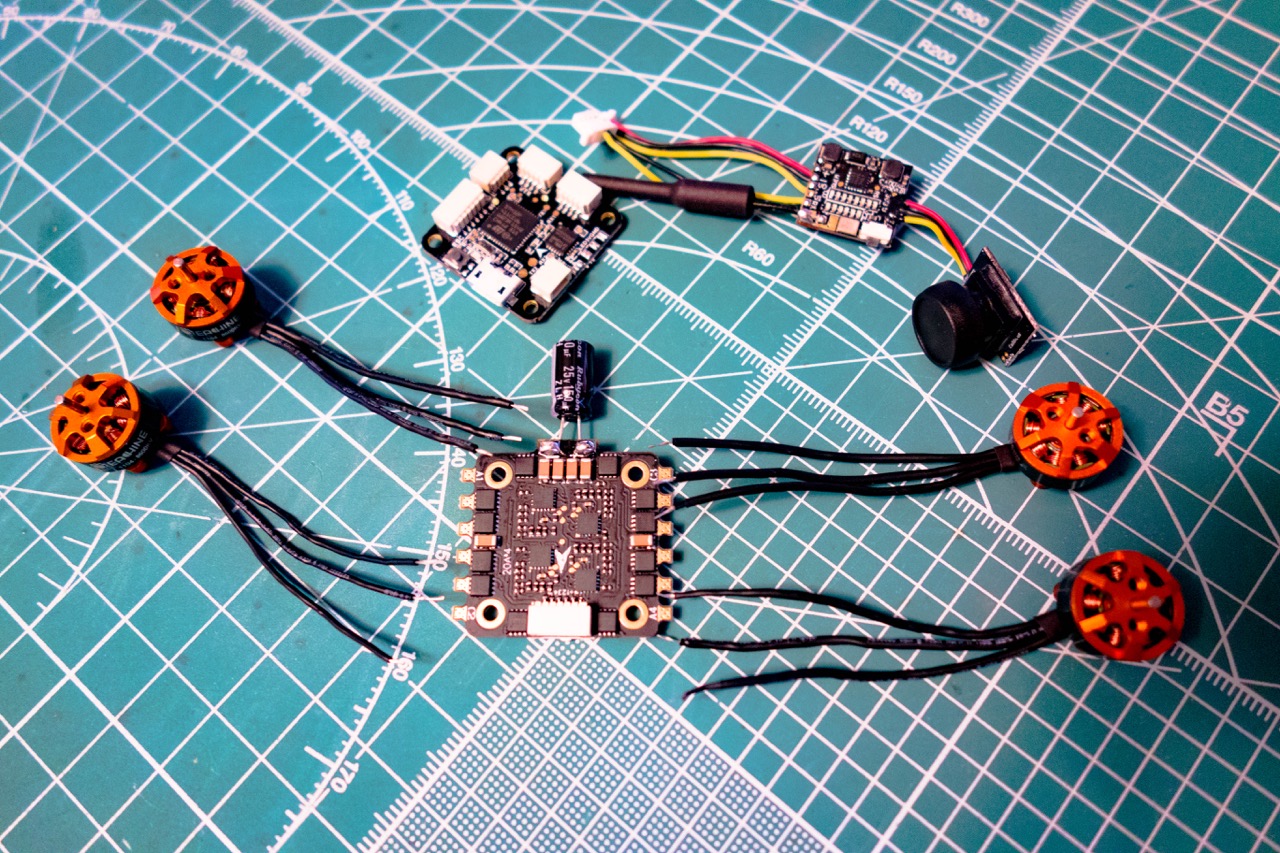
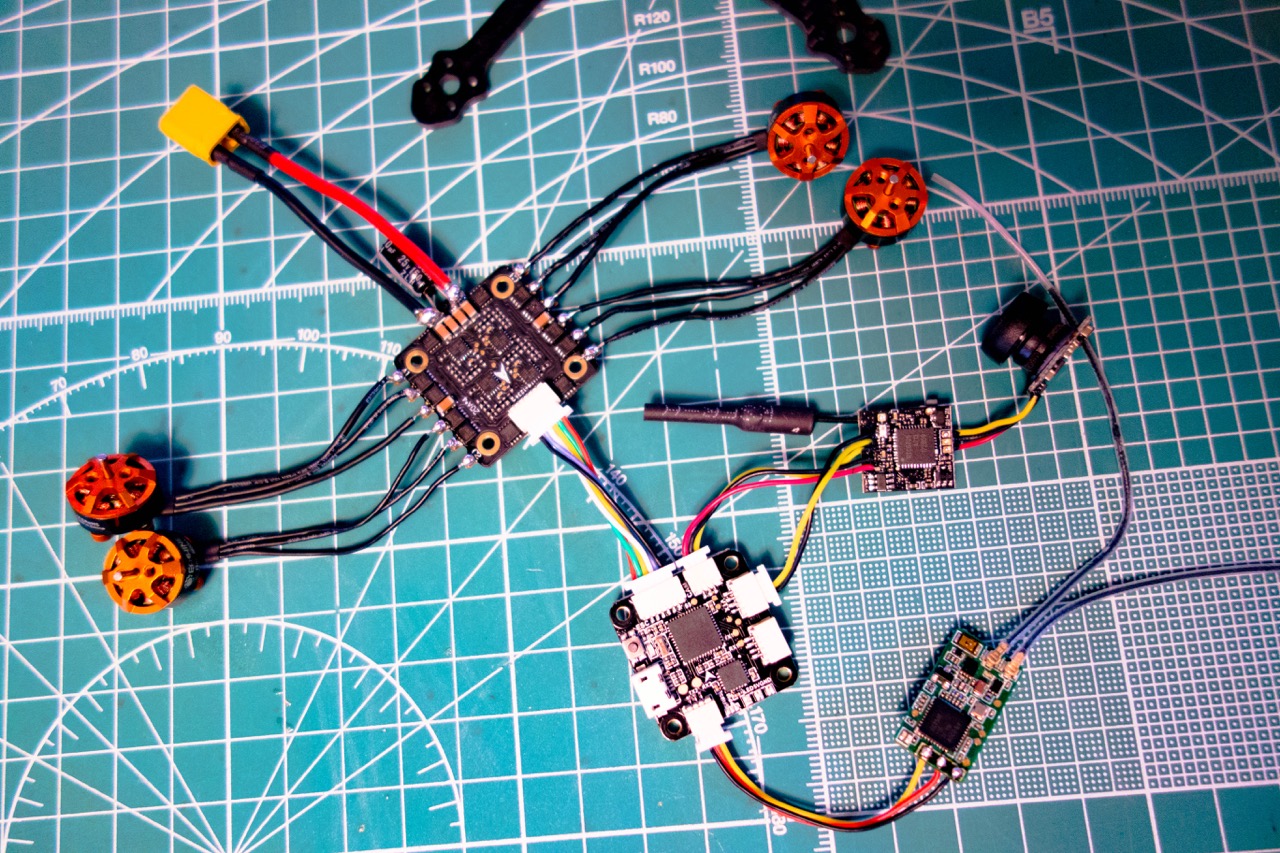
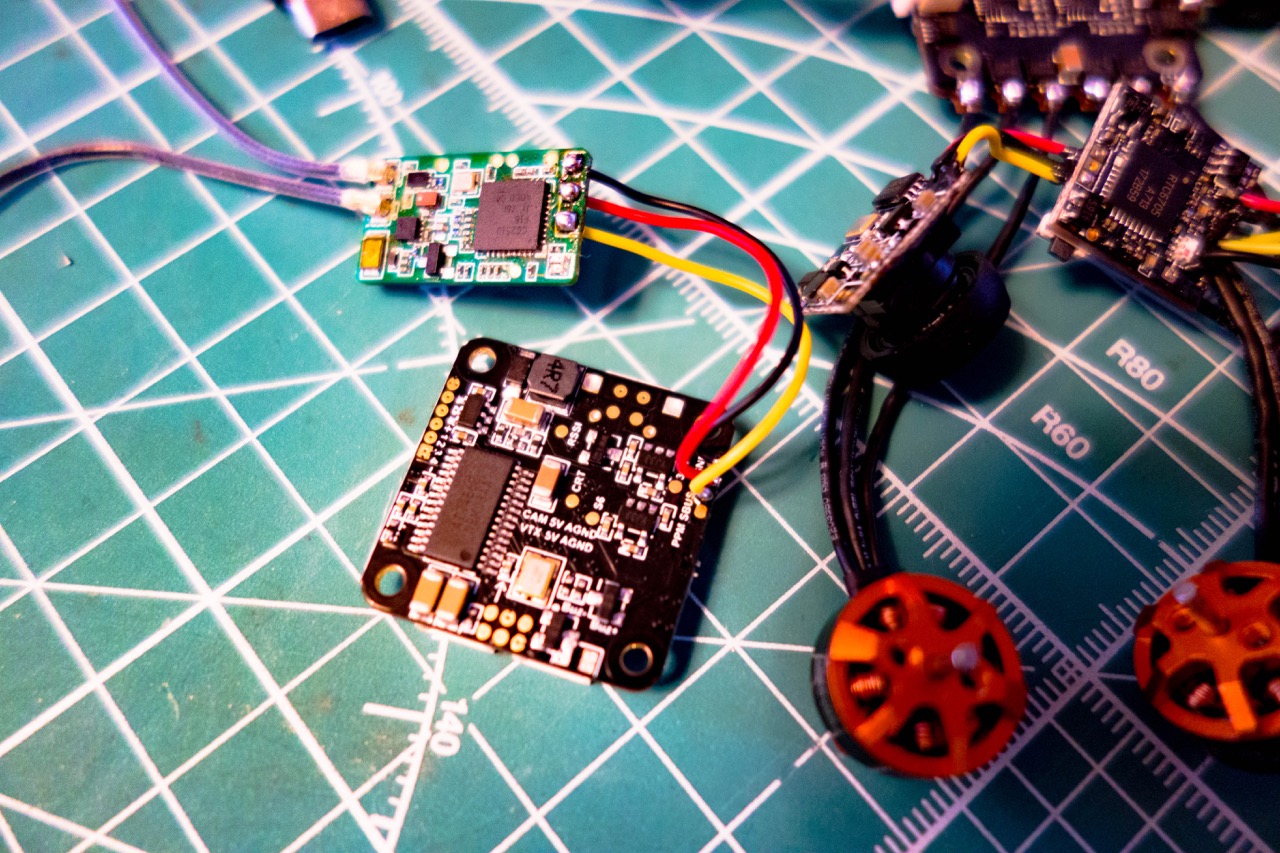
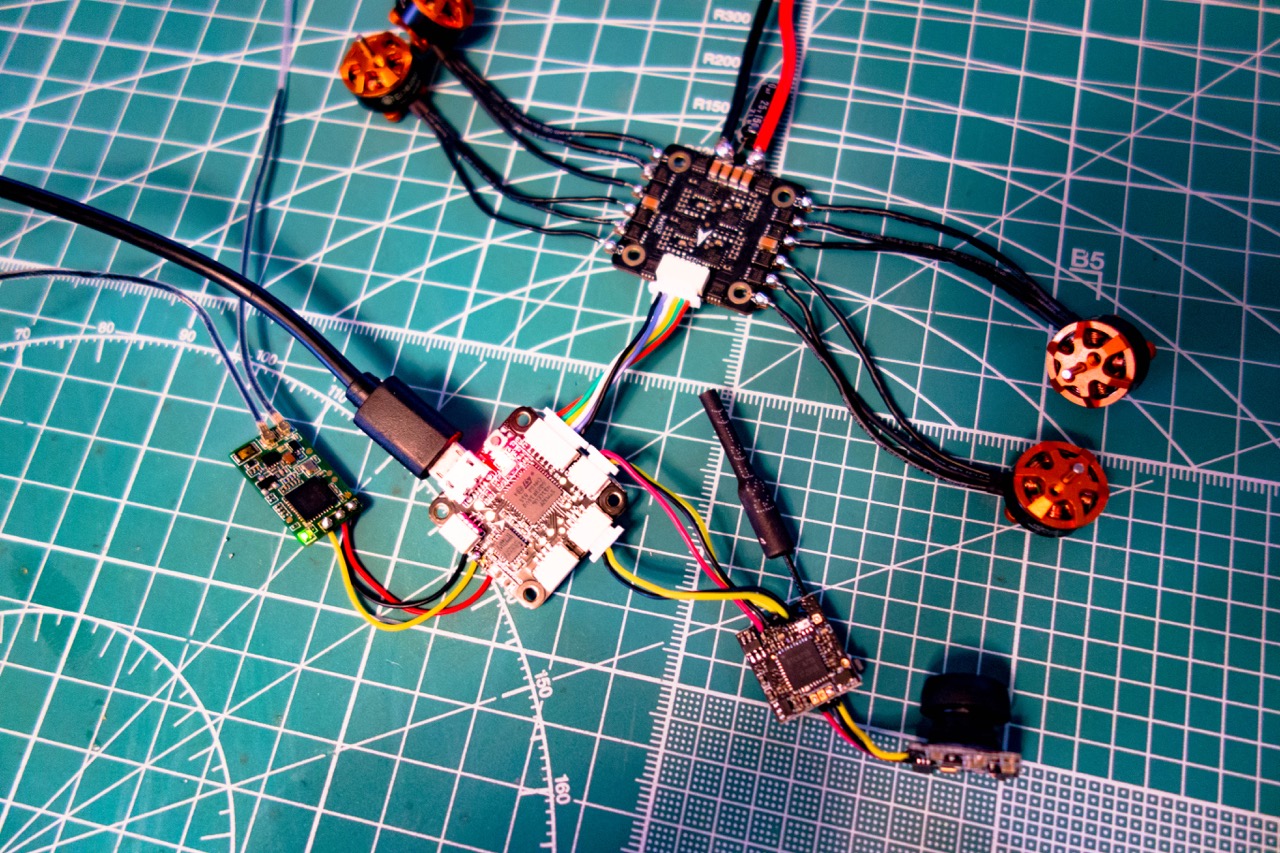
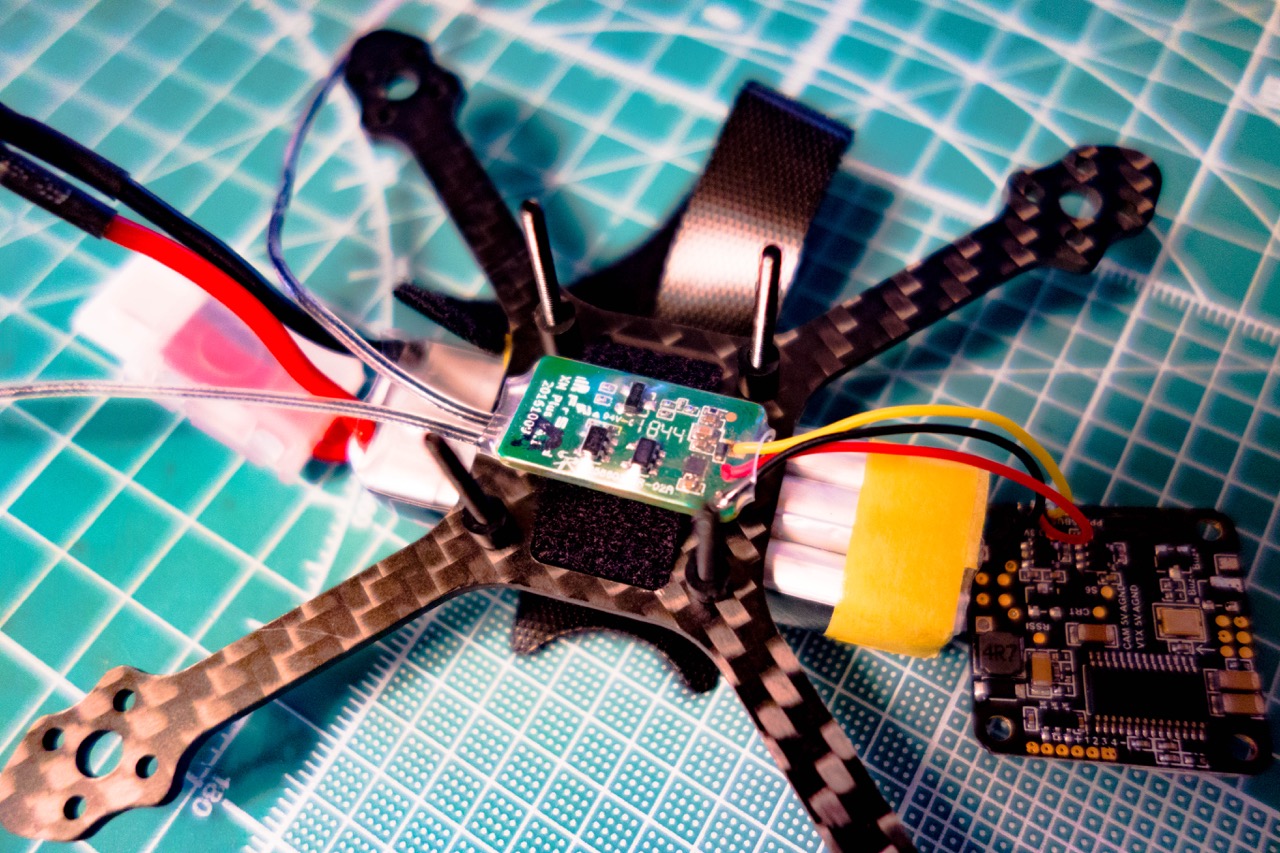
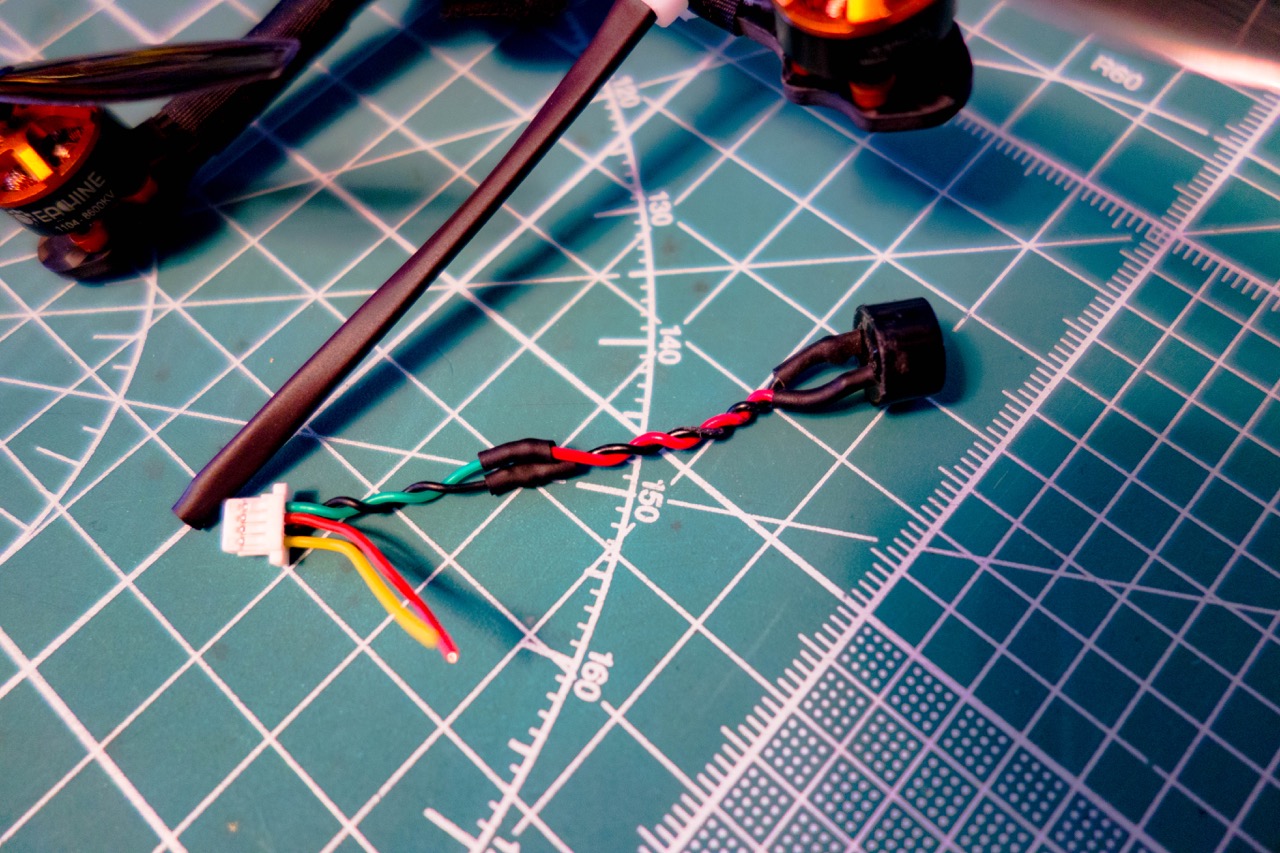
個別パーツのマニュアルはこちらから確認出来るのですが、機体を組む説明書的なものが一切付属していないので、ここで一旦仮配線してみることに。
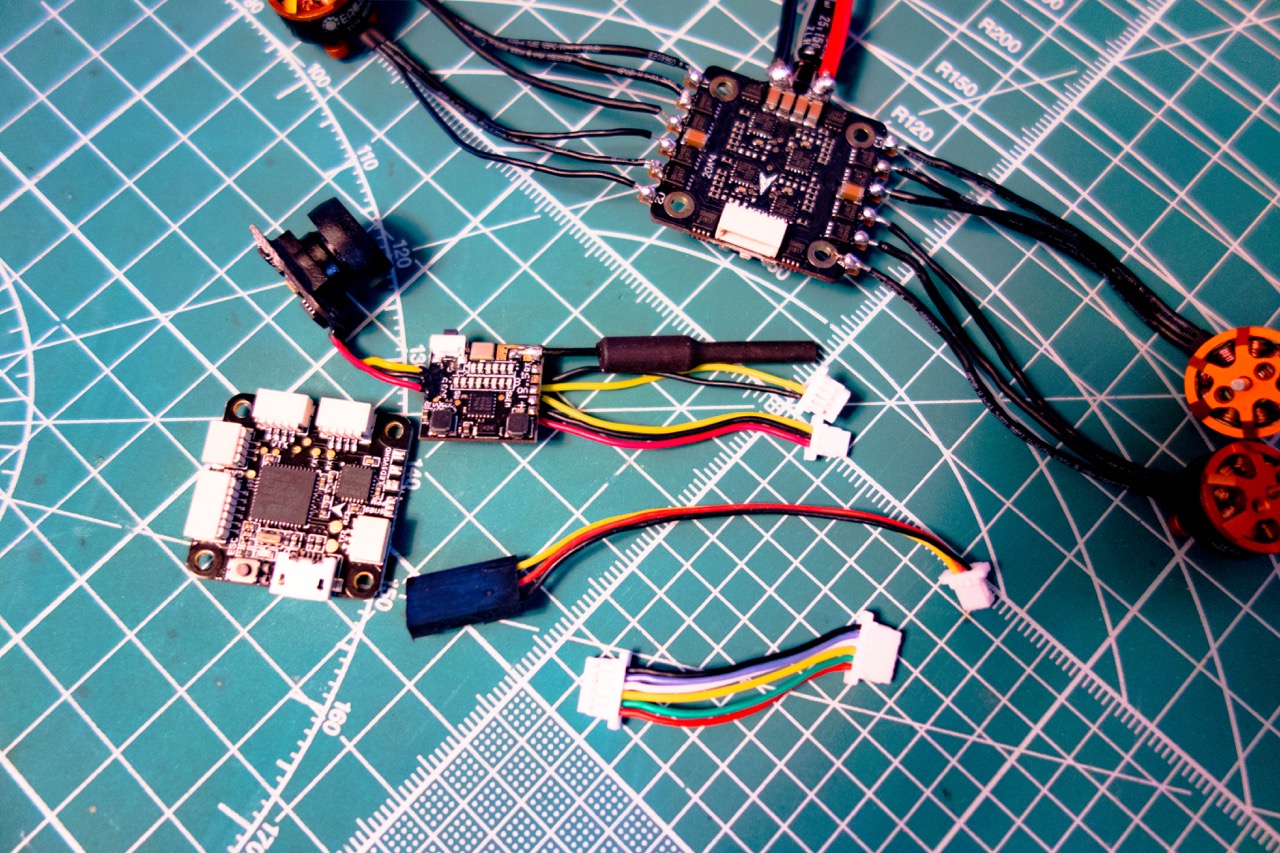
上記マニュアルを参考に接続するとこんな感じなります。
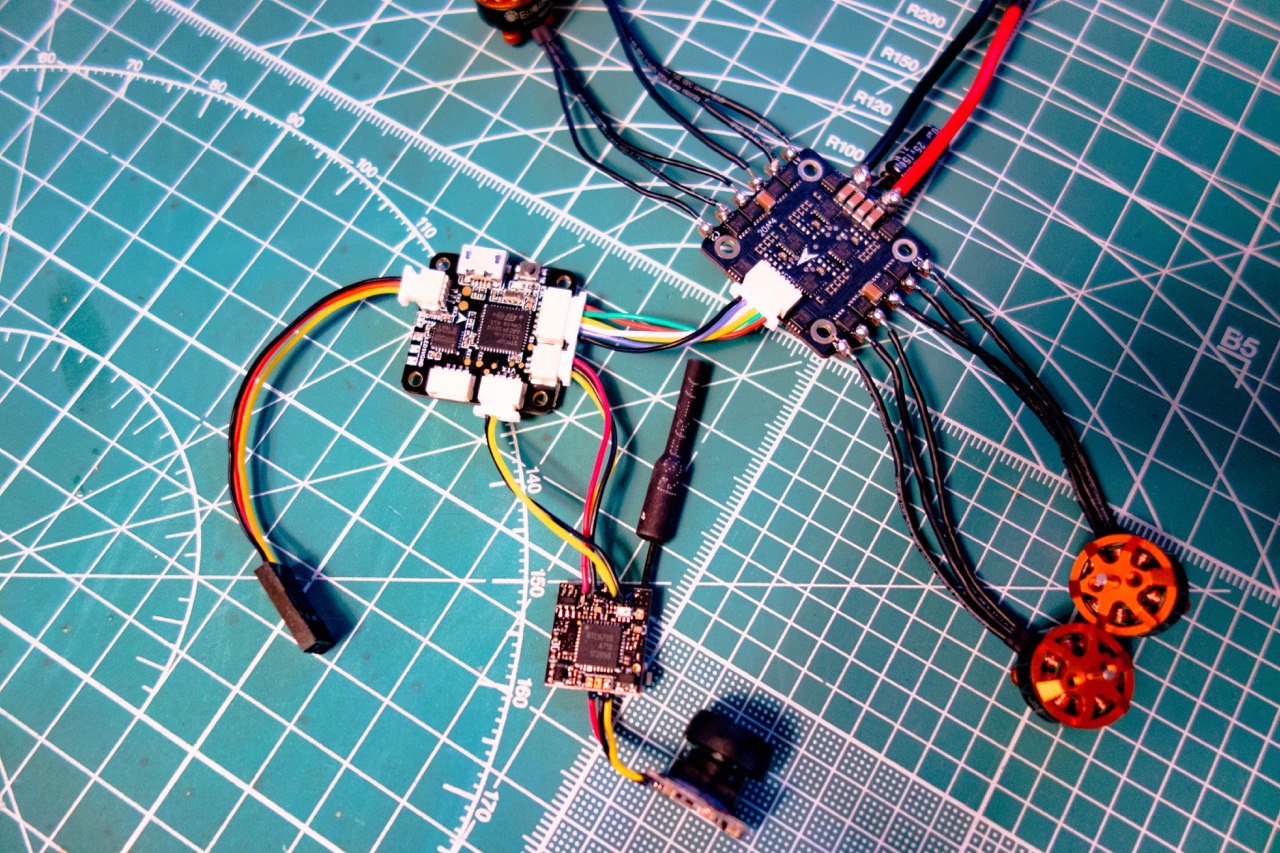
この変換プラグを使って受信機と接続しろということみたいですね。
使わない片側をカットして受信機に直接はんだ付け。
この状態でバインドしてみることにしましたが・・・ここからが長かった!(トラブル発生)
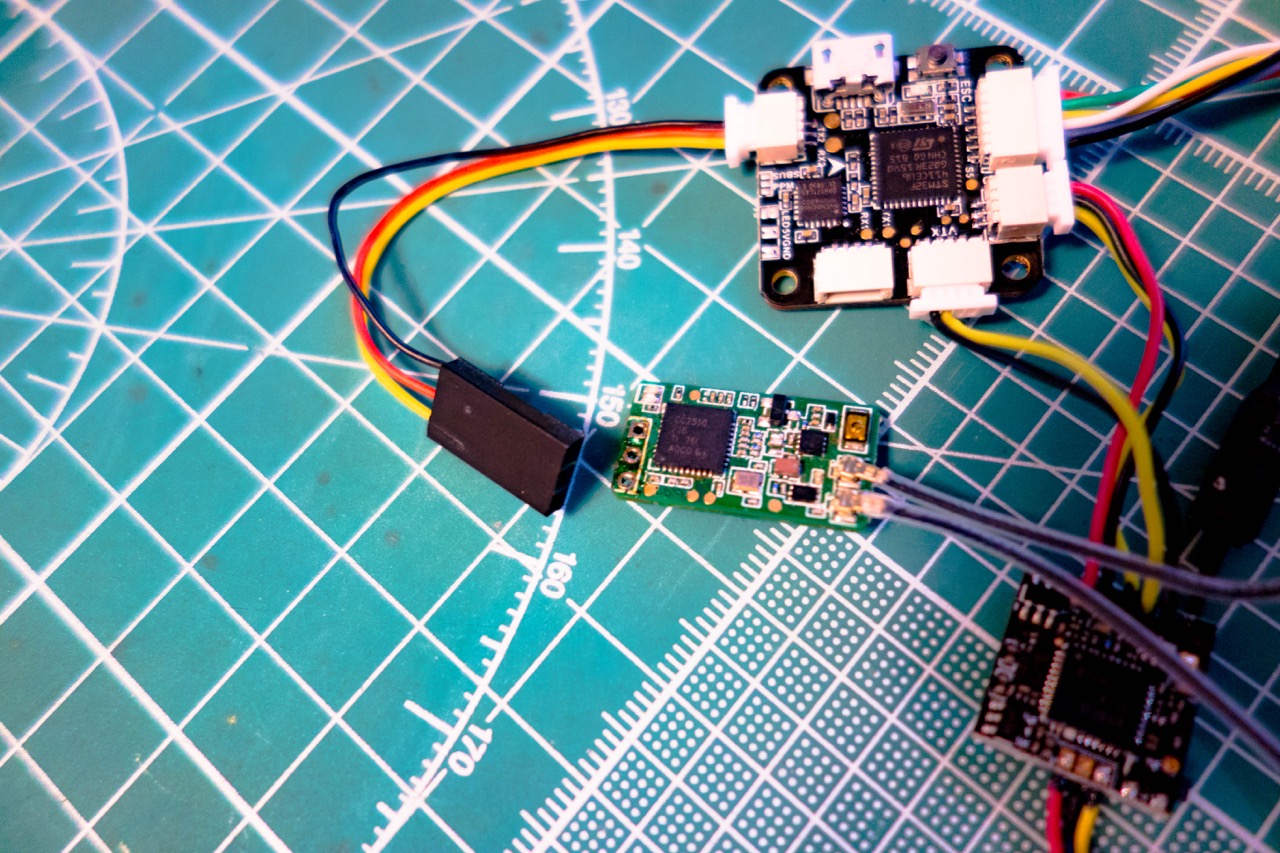
バインド作業が完了し、Frsky xm+レシーバーの緑LEDが点灯して送信機と無事繋がったのですが・・・Betaflightの受信機タブが全く動かない。
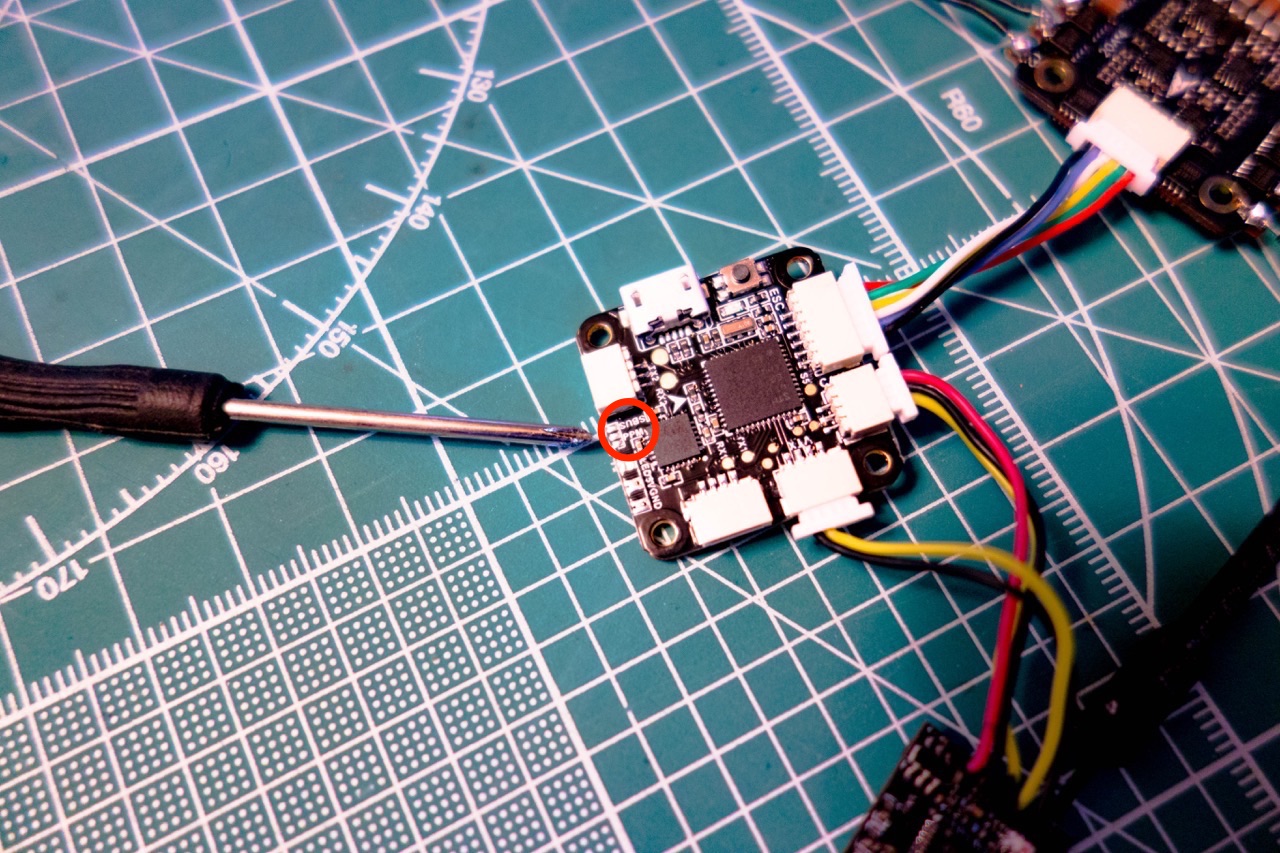
SBUS使用にはFC上のポートを短絡させる必要がある!
マニュアルを見るとどうやらSBUS入力には、FC上のポートを短絡させる必要があるようです。

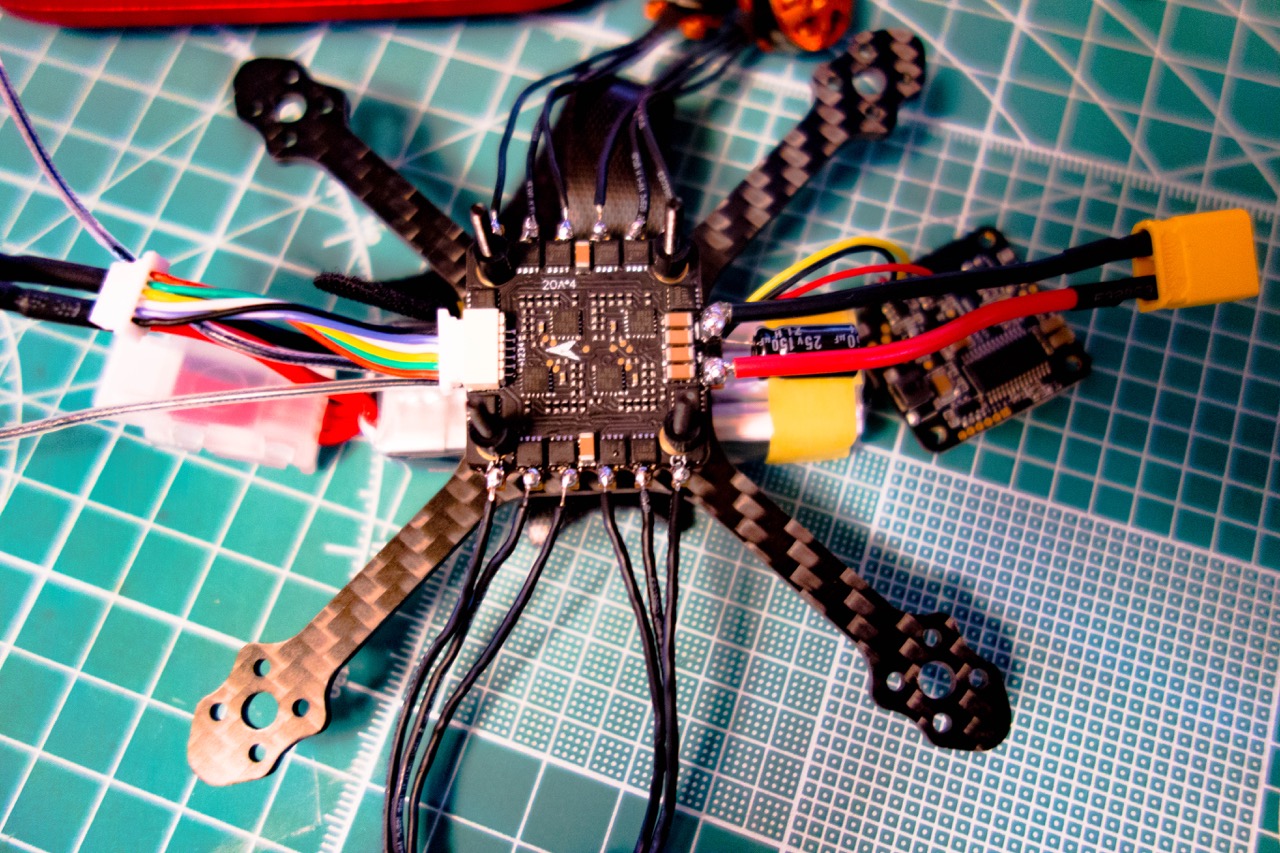
SBUSとPPMポートがあります。(見えるかな?)
SBUSと真ん中を半田付けして短絡させます。
で、再度やってみるが・・・同じく受信機とバインドは出来ているのですが、Betaflightの受信機タブは動かない・・・
次にファームウェアのバージョンを確認すると3.5.5と古かったため最新の4.0.6にファームアップさせてみるも・・・同じく反応してくれず。
・・・2時間経過!
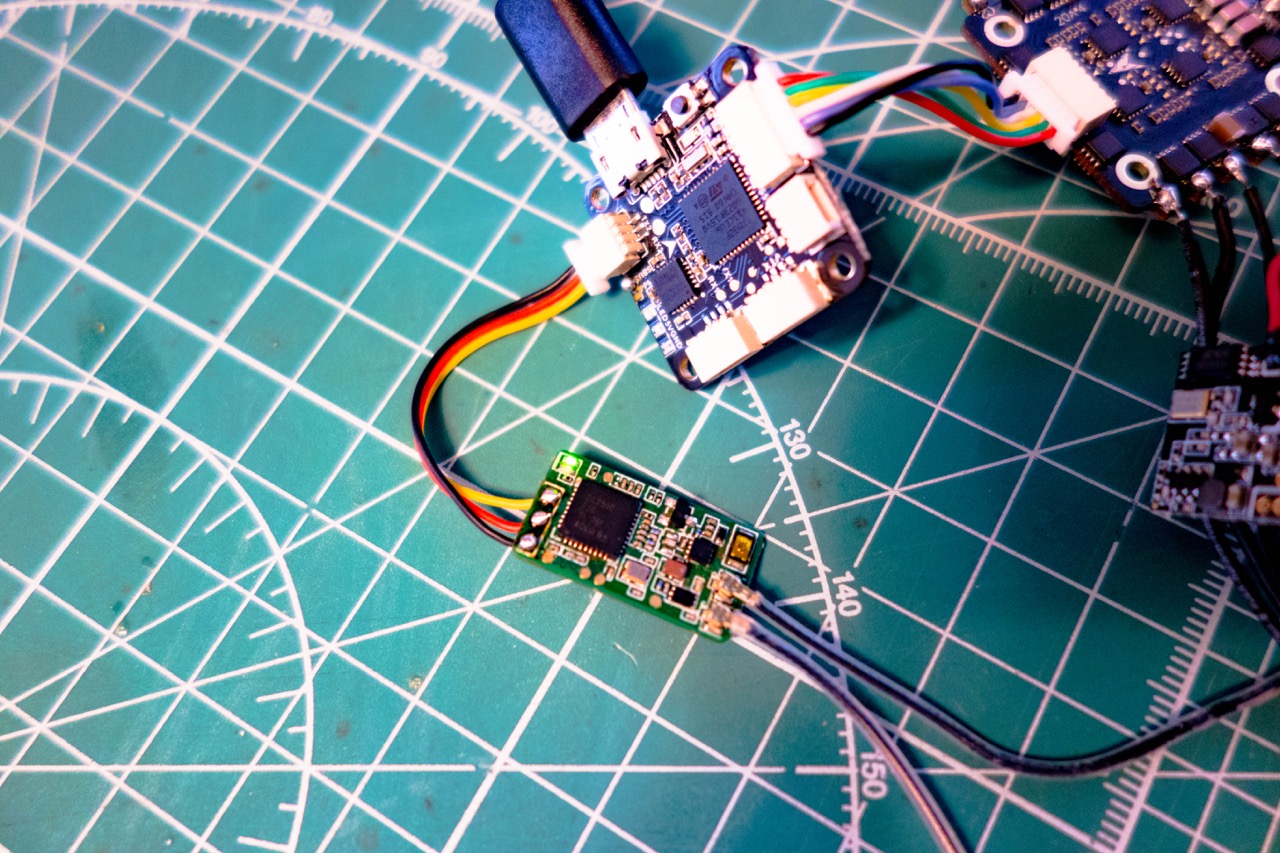
そしてようやく発見?
FCのポートをいろいろ確認していると、受信機接続用の3ピンコネクタの裏にPPM・SBUS・5V・GNDの文字が!
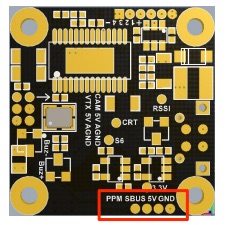
これかな?そもそもこの3ピンプラグがSBUS用ではないのか?
マニュアルには、5V・GND・RCという記載が。
RCって何?
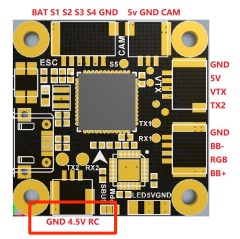
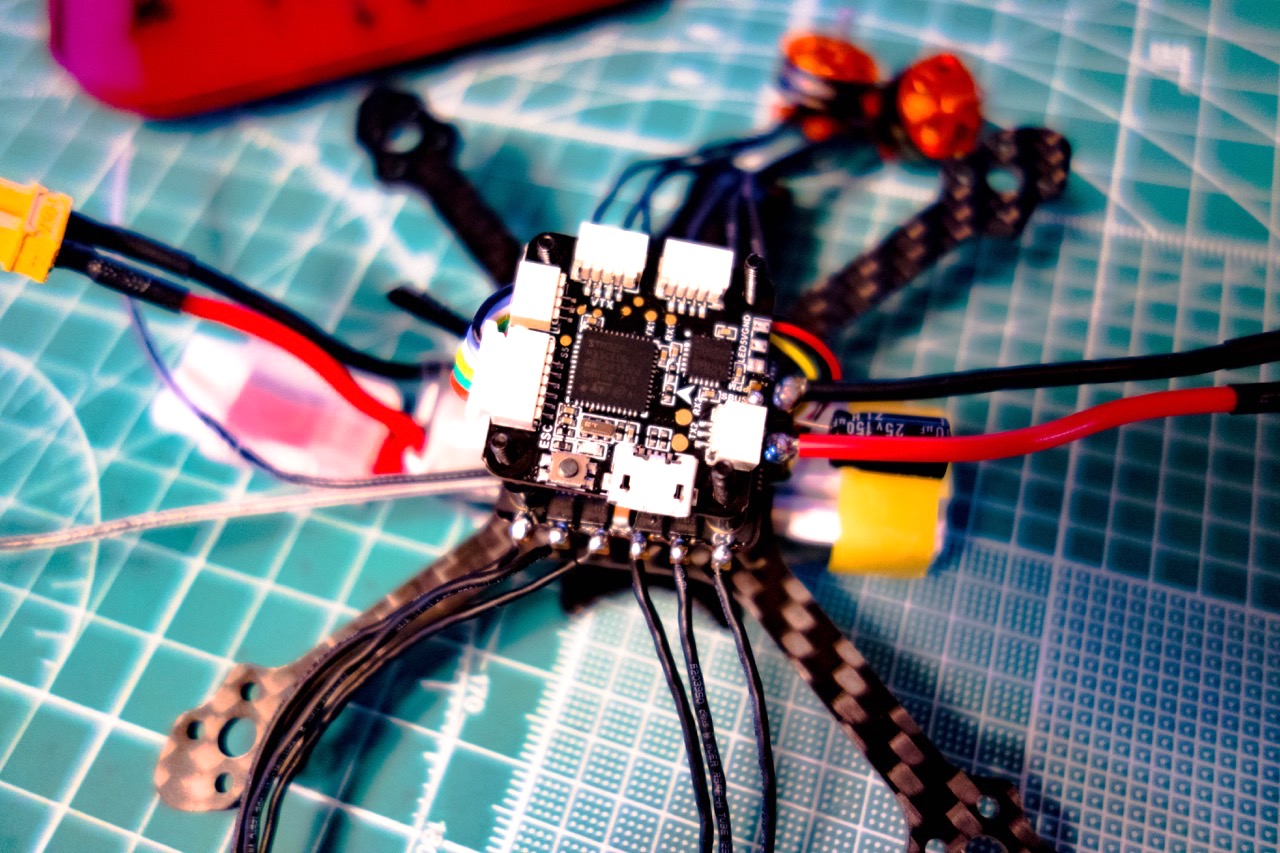
とりあえず配線をし直し、基盤裏のSBUS・5V・GND端子に受信機を接続すると見事に問題解決!
時間かかったぁ〜!
Betaflightでの各種設定を終え問題なさそうなので機体の組み上げ作業に戻ります。
機体の組み上げ!
サクッと組み上げていきます。
フレームに付属の長ネジをブッ刺しゴムダンパーを装着。
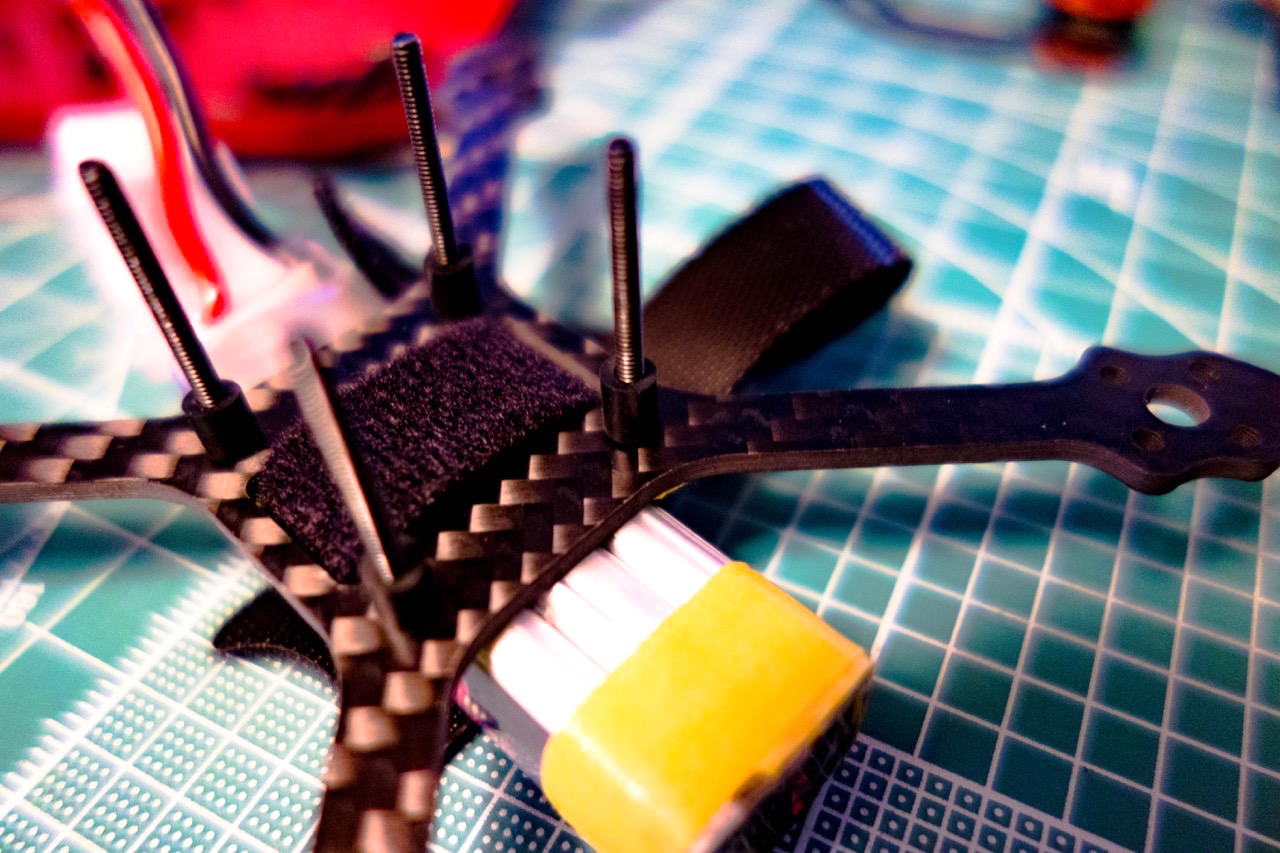
そのかさ上げ部分に受信機を配置してESCを載っけます。
さらにゴムダンパーをかまして次にFCを載っけます。
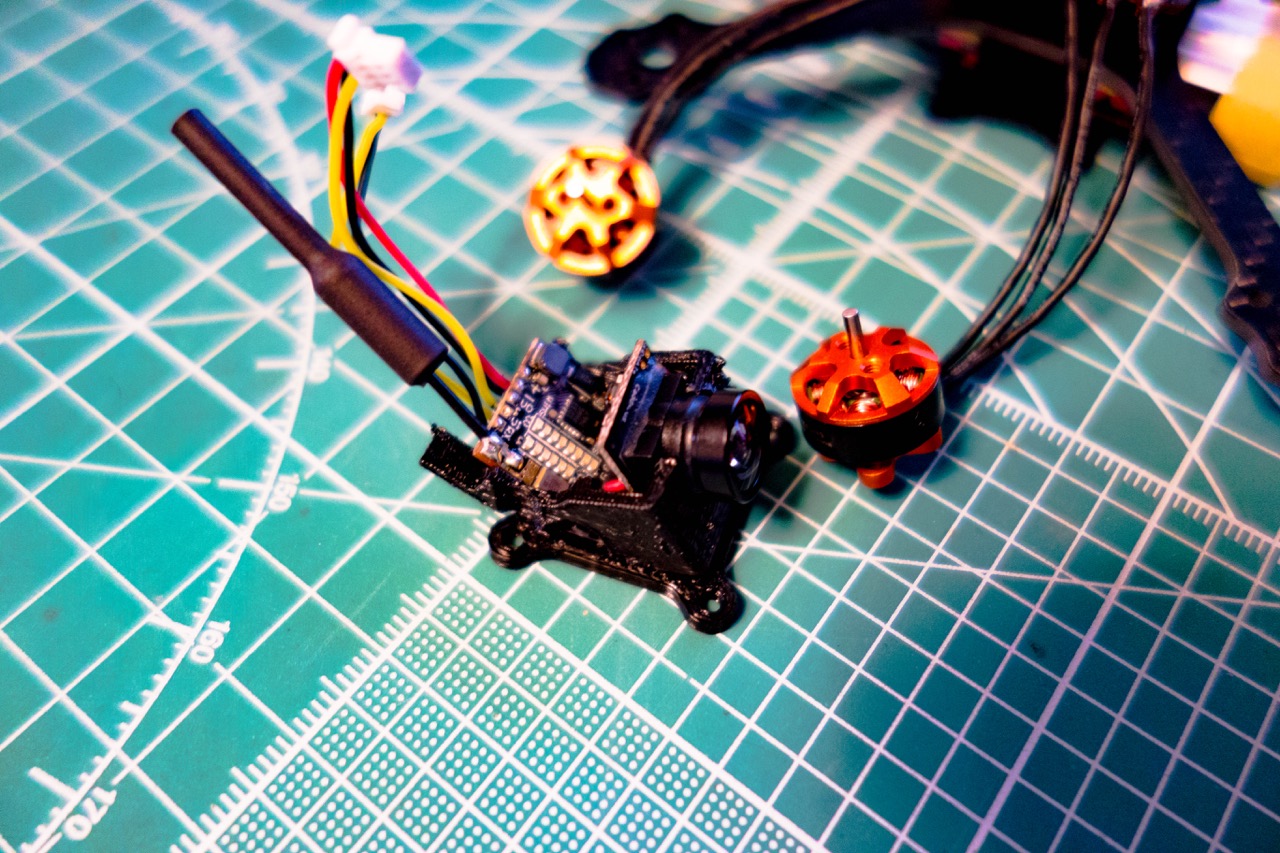
キャノピーにカメラ&VTXを装着。(↓カメラの向きが90°間違っています!)
これをトップに載っけてM2ナットで締め上げればほぼ完成です!
最後にモーターを固定して完成・・・なんですが、ここではじめて配線の取り回しを考えておけばよかったと少し後悔!
かなりケーブルが余ってしまいました。
なんとかESCの下にもぐらせテープで固定して綺麗に仕上がりました。
手順的には、フレームにESCとモーターを固定してケーブルの取り回しを考えて適度な長さにカットしてからはんだ付け・・・これが正解なんでしょうね、きっと!
まぁなんとか綺麗に収まったのでよしとしましょう。
あとは受信機のアンテナをシュリンクチューブで固定して完成っと!
意外と大変だった!
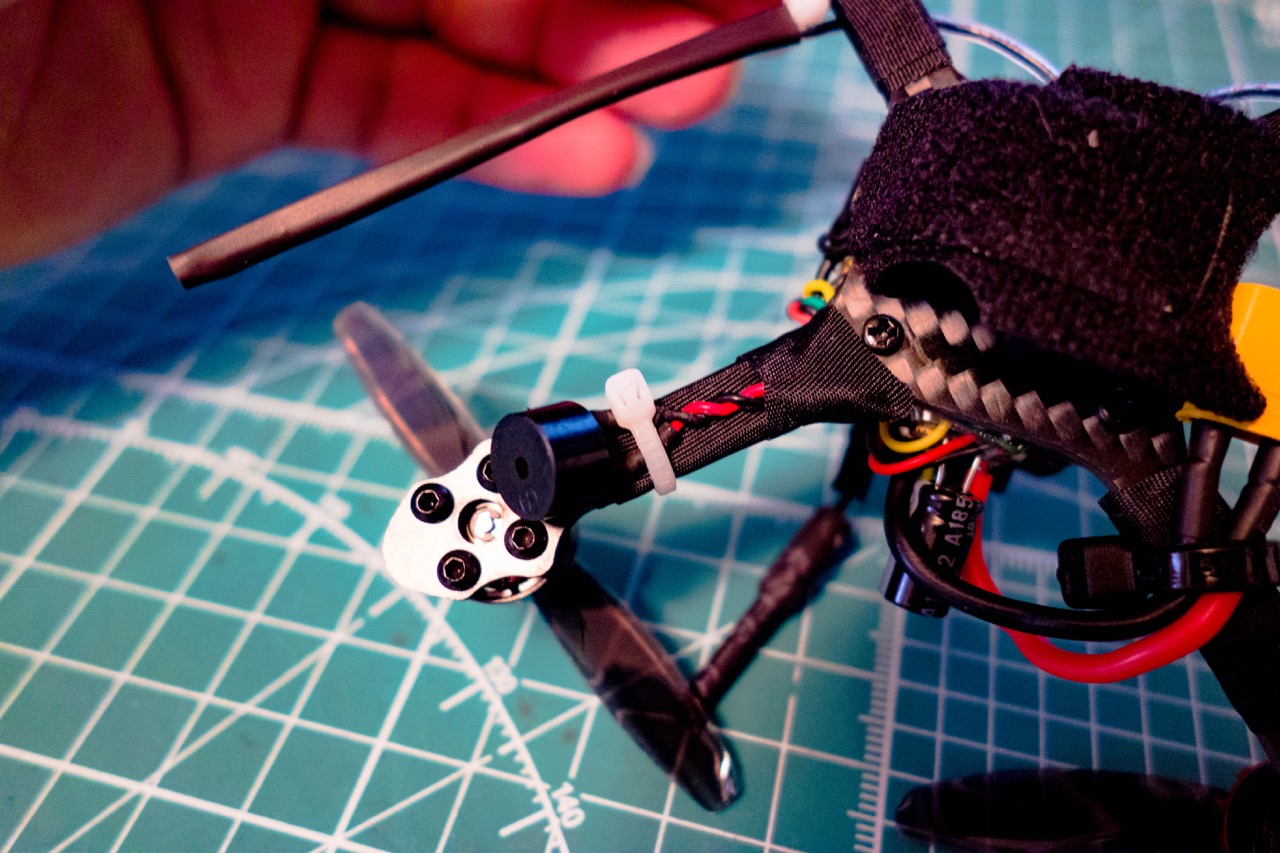
ブザーの取り付け!
ブザーの取り付けは簡単です!
FCの使っていないコネクタ部分にブザーポートがあります。

手元にたまたまあったプラグを使いましたがマイクロJST1.0mm 4ピンコネクタだと思います?
このコネクタのBB+とBB-部分にザーを接続するだけで完了!
機体を解体する必要もないのであとから簡単に取り付けができます。
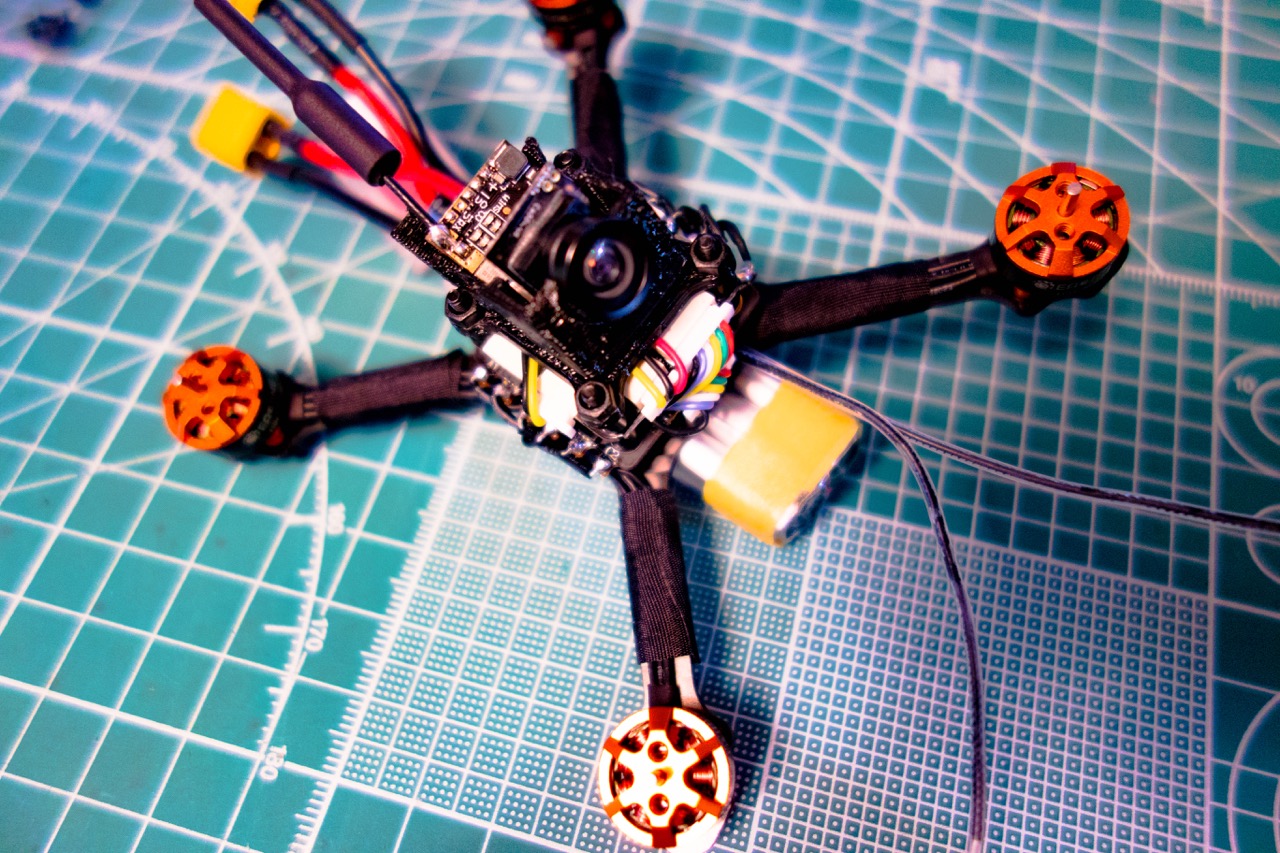
こんな感じに設置完了!
機体重量は約53gとなりました。

Betaflight設定!
少し長くなったのでBetaflight設定の話はまた別で詳しくご紹介したいと思いますが、少し要点だけご説明。
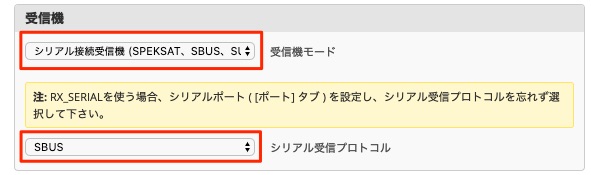
外付け受信機のSBUS入力なので、【ポート】でUART1を[シリアル受信]に設定。

【基本設定】の[受信機]をシリアル接続受信機、SBUSに設定。
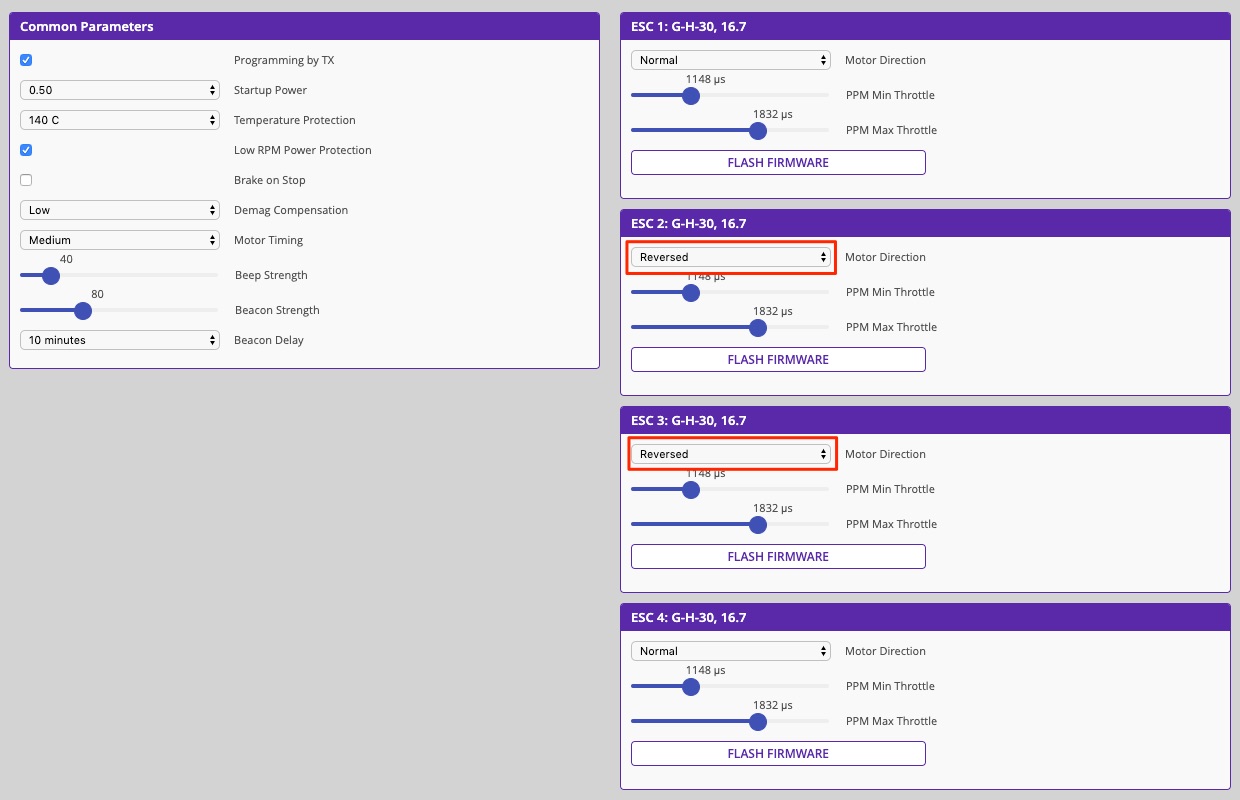
BLHeli設定!
今回、ESCへのモーター接続は全てノーマル接続(正回転)にしています。(Betaflight側でもモーター回転方向を逆転設定にはしていません)
なのでBLHeliで、2番と3番モーターにReversed設定をしています。
keraさんありがとうございました。
https://twitter.com/walkunaikera/status/1175277909860220934
まとめ!
なかなか面白いToothpick DIYキットです。
1から機体を組んだのが初めてだったのでいろいろと手間取り時間がかかってしまいましたが、その分得るものもありました。
このスペックのToothpick完成機を買うよりお安く、また部品取りとしてやここからさらにカスタマイズもでき、そして自作機へのベース機体としてもいいかもしれませんね。
ようやく完成し安堵していると余ったパーツが・・・
M2ナットは予備だとしてもこのサイズのビスなんて使ってないし?
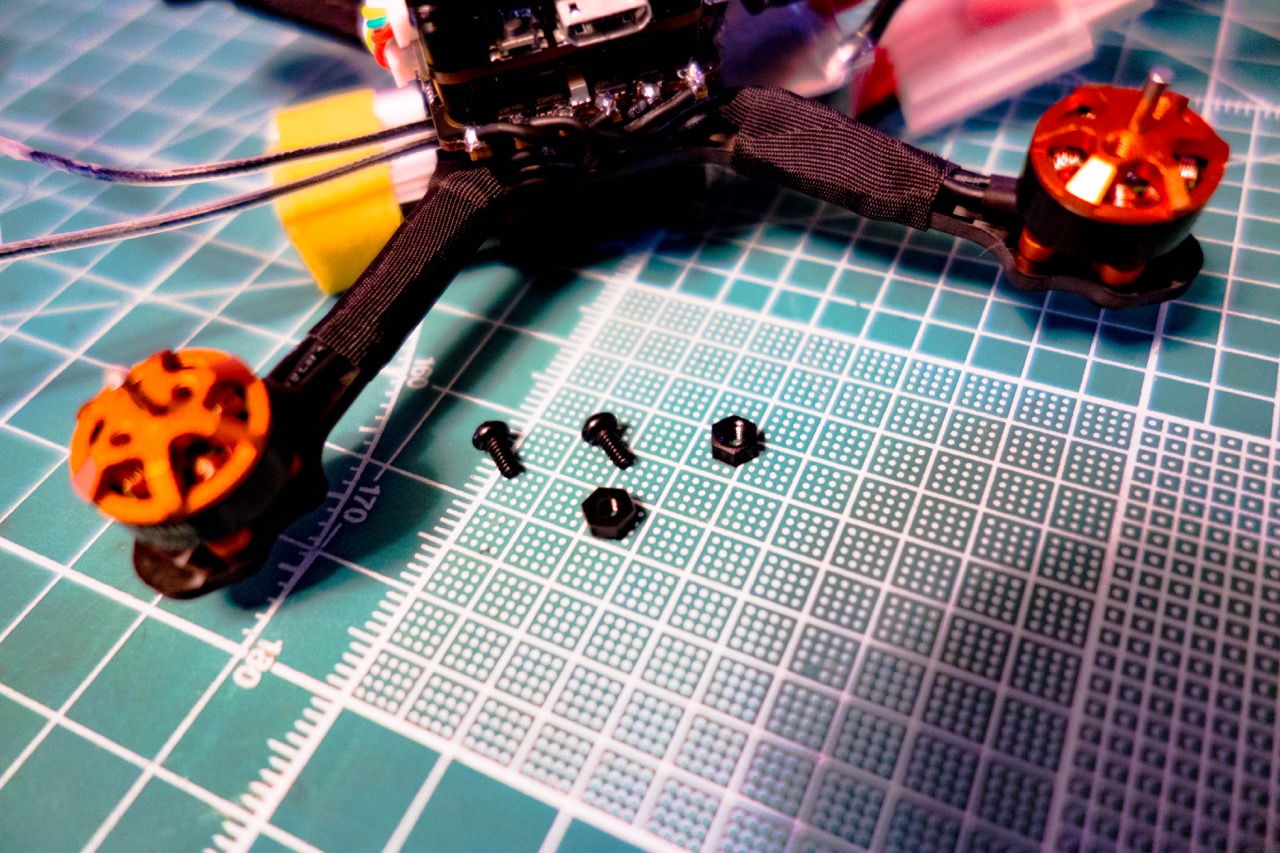
お分かりになる方教えて下さい。
とりあえず、そっとしまっておきます。
あー疲れた!!!

Eachine Tyro69 105mm F4 OSD 2.5 Inch 2-3S DIY FPV Racing Drone PNP w/ Caddx Beetle V2 1200TVL Camera
 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  【Eachine Tyro69 105mm】Betaflightの設定&ブザーの取り付けをやってみる!そこそこ高い構成パーツなので部品取りや自作Toothpickのベース機体にも良さそうですね!
【Eachine Tyro69 105mm】Betaflightの設定&ブザーの取り付けをやってみる!そこそこ高い構成パーツなので部品取りや自作Toothpickのベース機体にも良さそうですね!  【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】  気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】
気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】  【Emax Tinyhawk Freestyle 115mm】バインドからBetaflight設定、ブザーの取り付けをやってみる!VTXの調整はロック解除が必要なようですね!
【Emax Tinyhawk Freestyle 115mm】バインドからBetaflight設定、ブザーの取り付けをやってみる!VTXの調整はロック解除が必要なようですね!  お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!
お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!  いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】
いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】  【Eachine Twig】お手頃価格で初3インチ機にオススメなEachine Twig。受信機増設は必須かも?
【Eachine Twig】お手頃価格で初3インチ機にオススメなEachine Twig。受信機増設は必須かも?  【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!
【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!  気になるToothpick『FLYWOO XBOT65 HD』『FLYWOO XBOT3 HD』
気になるToothpick『FLYWOO XBOT65 HD』『FLYWOO XBOT3 HD』  【Emax Tinyhawk Ⅱ RACE】最低限のBetaflight設定をやってみる!
【Emax Tinyhawk Ⅱ RACE】最低限のBetaflight設定をやってみる!  【BETAFPV HX100】手持ちの余ったパーツでサクッとHX100を組んでみました!簡単に組めるのによく飛んでくれます!
【BETAFPV HX100】手持ちの余ったパーツでサクッとHX100を組んでみました!簡単に組めるのによく飛んでくれます!


Caddx Beatle V2の系統図、どうやって入手したんだろう…