
先日作成したDIY Toothpick『Eachine Tyro69』を野外でテスト飛行してきました。
これもよく飛んでくれます!
というか、Toothpickで飛んでくれない機体ってあるのかな?

なんせよく飛んでくれます。
この機体重量(約53g)でToothpick機でよく使われている65mmサイズの大きなペラ、3セルバッテリーで飛ばすと自転車にエンジン付けてるような感覚すら感じます。(ど素人ですいません!)

2セルでは普段飛ばしているToothpick機に近い設定で気持ちよく飛んでくれました。
3セルとなるとスロットル値を80%まで下げていたのですがそれでもかなりピーキーな飛びで・・・
Sailfly-Xなどはこれくらいスロットルを抑えてあげると普通に飛ばせてたのですが・・・少し設定を見直さなくてはいけないかも!
まぁこのあたり私の腕がないのが大きな要因なんでしょうが、20A ESCってのも関係してるのかな?
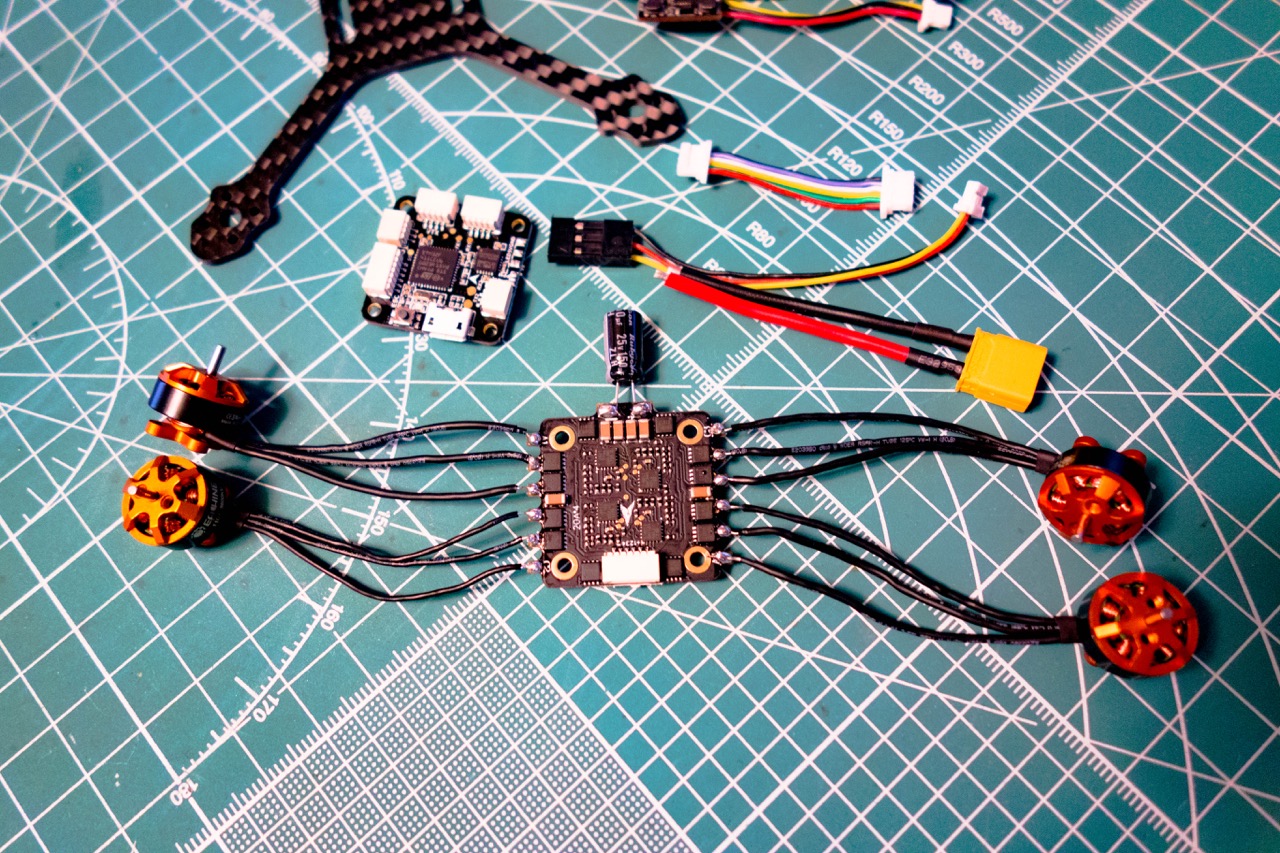
この機体が面白いのは、完成機ではなくパーツから組み上げていくDIY Toothpickキットということ。
必要なパーツが同封されており(受信機は別途用意する必要があります)自分で組み上げていく必要があります。
これがなかなか勉強になりました。

組み上げる手間はかかりますが、その分非常にお安い!(7,500円くらい!)
このスペックの機体としては破格な価格設定ではないでしょうか?
1104 8600KVモーターの2〜3セル機となりますが、20A ESCが使われているのでモーター交換でセル数上げたりフレーム変更で大型化させたり・・・とカスタマイズや自作機のベース機体としてもいいかもしれませんね!

また、一回り機体サイズが大きい同じくDIYキット『Eachine Tyro79』なんてのも気になっていますが、こちらは今の私ではおそらく扱いきれないでしょうね、たぶん?
今回、飛ばせる状態にするまでの最低限のBetaflight設定やブザーの取り付けをご紹介します。
Eachine Tyro69 105mm F4 OSD 2.5 Inch 2-3S DIY FPV Racing Drone PNP w/ Caddx Beetle V2 1200TVL Camera

目次
【Eachine Tyro69】Betaflight設定 & ブザーの取り付け!
まずはブザーの取り付けをやっていきます。
このスペックの機体でブザーがないのは私の腕では考えられません。
ロストしちゃいますね、きっと!
ブザーの取り付けは簡単!
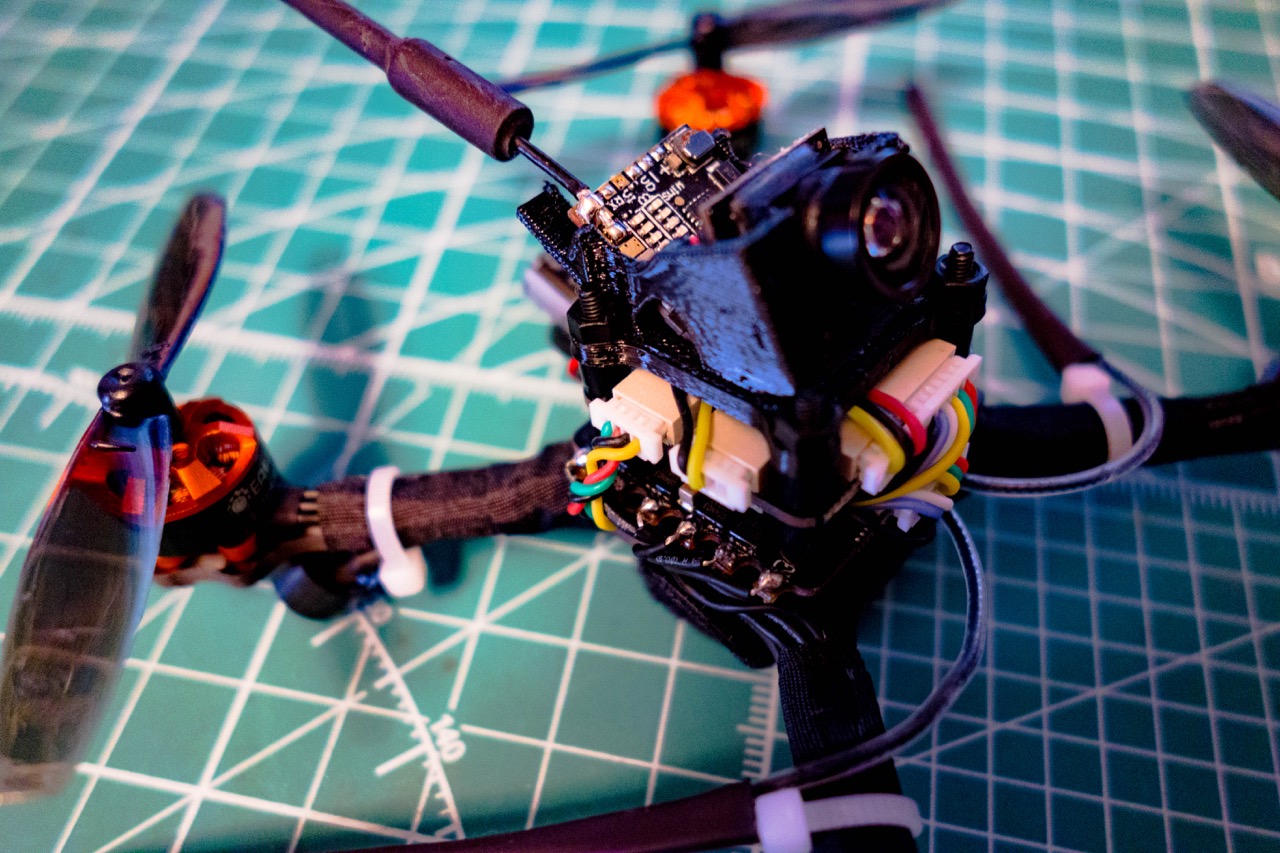
これは前回、機体を組み上げた際にやってしまいました。
機体を解体してFCにはんだ付け作業等の必要がなくプラグに挿すだけなので後から簡単に設置できます。
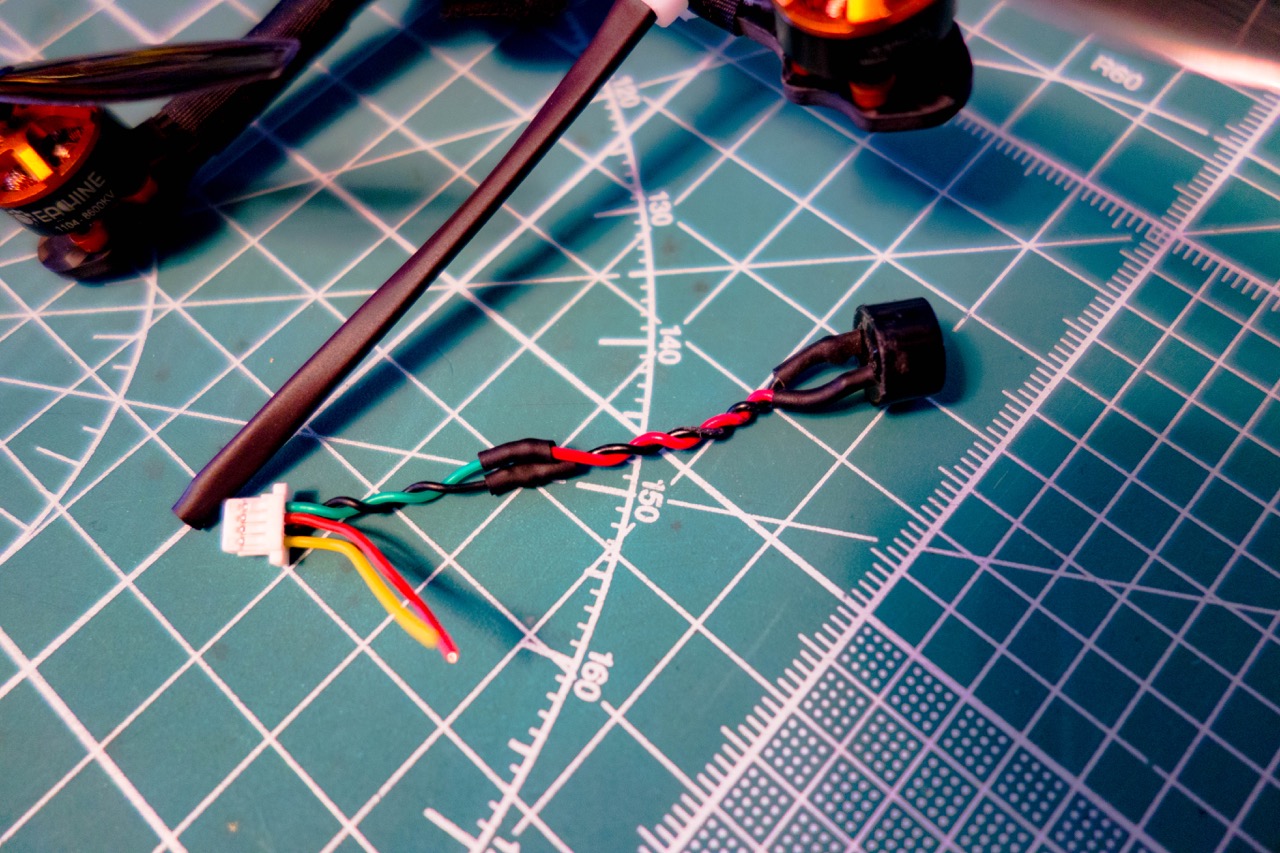
FCの使われていないプラグにブザーポートがあります。(残りはLED_STRIPかな)
4ピンのプラグを用意する必要があります。(同封されていません。別途用意する必要があります!)

手元にあったプラグを使いましたが、形状はマイクロJST1.0mm 4ピンプラグだと思うのですが?(←すいません)
使うのは2ピンのみ。
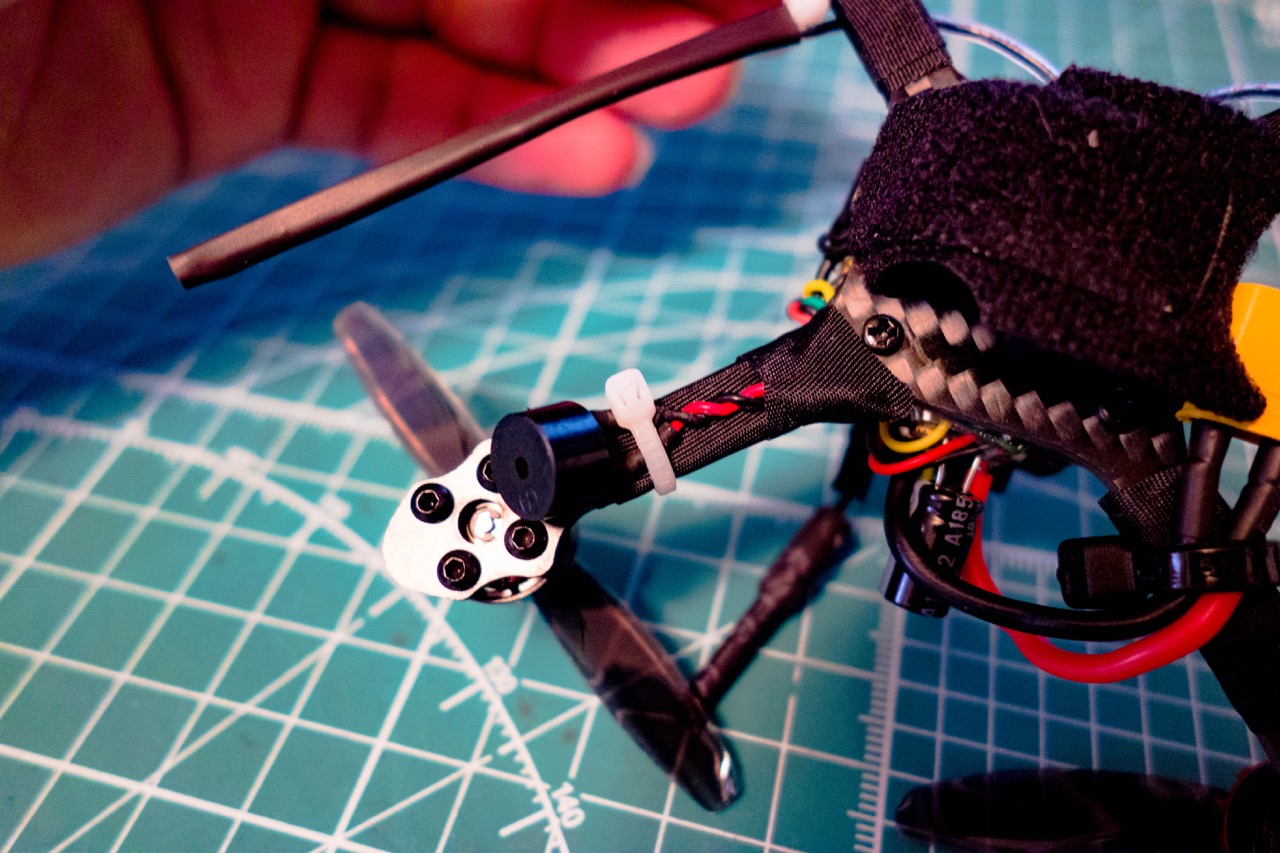
BB+ とBB−端子にブザーを取り付ければ完了です。
こんな感じに設置しました。
Betaflight設定 & バインド作業!
次にBetafilghtの設定に移ります。
飛ばせるまでの最低限の設定に限定したいと思います。
PIDやRates等々はお好みで変更して下さい!
初期状態の設定を保存!
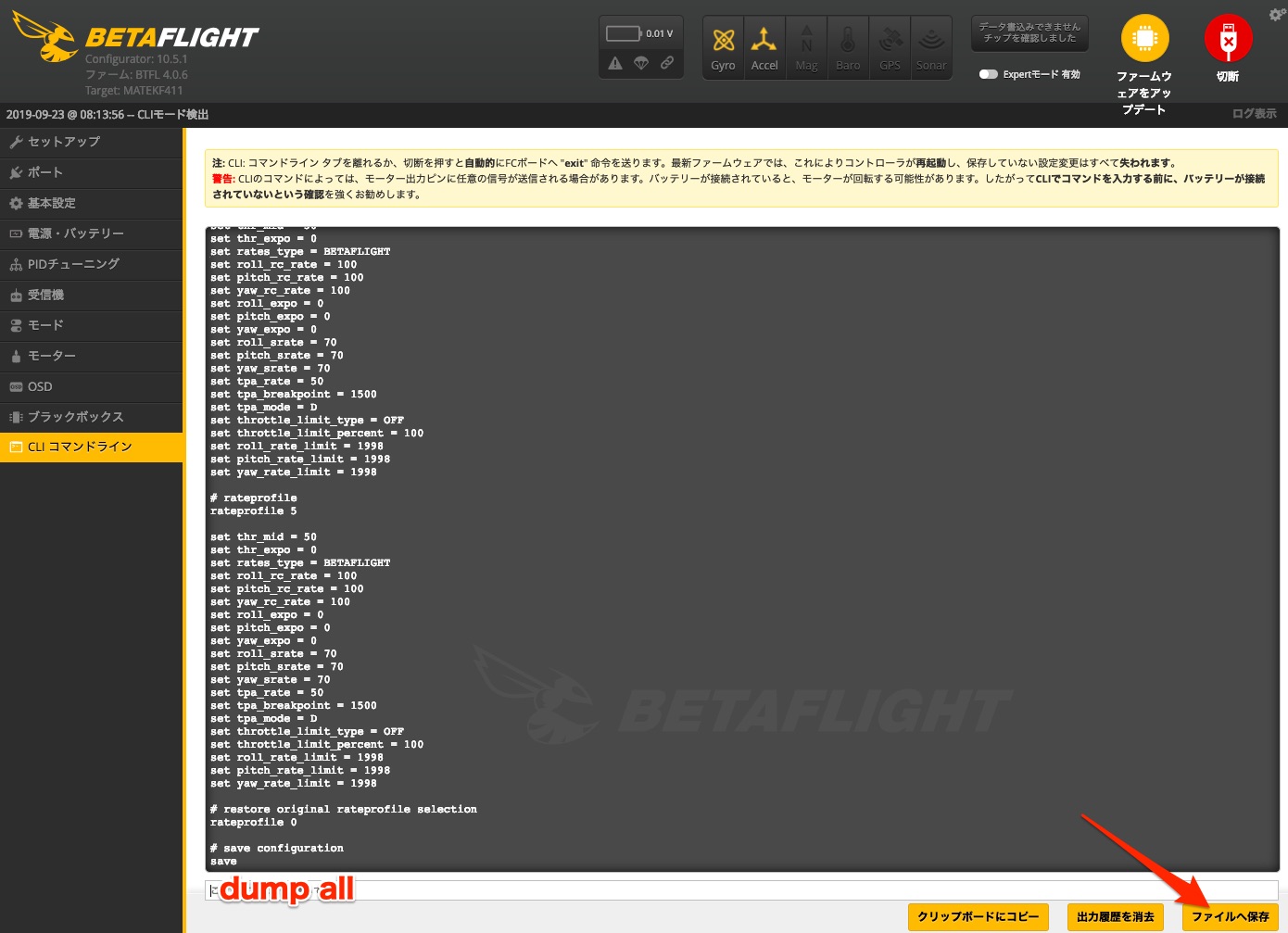
まず初期状態の設定を保存しておきます。
[CLIコマンドライン]からdump allでファイルを保存しておきます。
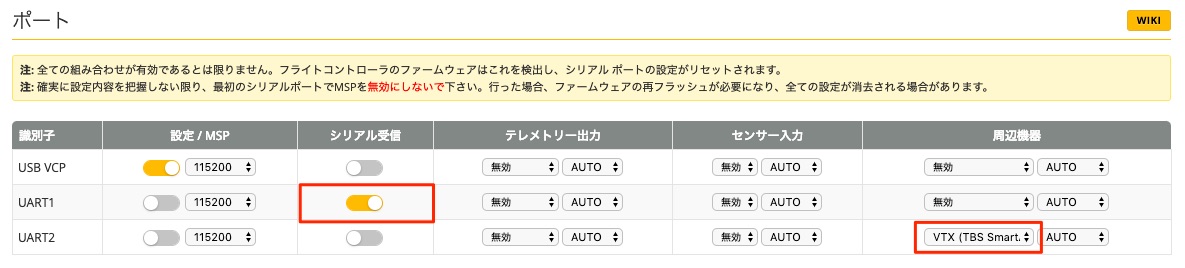
ポート設定!
次にポート設定。
UART1の[シリアル受信]をON設定。
UART2の[周辺機器]にSmart Audioを割り当てます。
基本設定!
[ESC/モータープロトコル]をDSHOT600に変更しました。
モーターアイドルスロットル値は少し上げています。(こちらはお好みで!)
ジャイロ演算周波数を8kHz、PIDループ演算周波数を2kHzに変更しました。
アーム最大角を180°に変更。

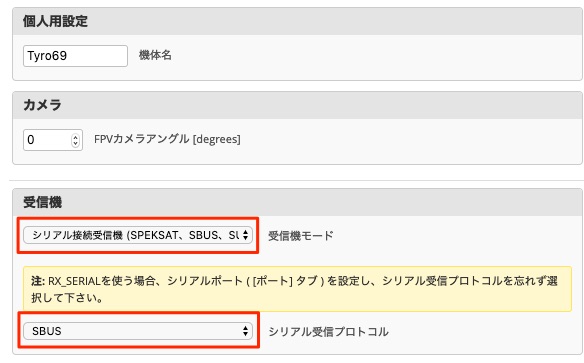
機体名の入力。
[受信機モード]をシリアル接続受信機、[シリアル受信プロトコル]をSBUSに変更。
[Dshotビーコン設定]をONに設定しました。

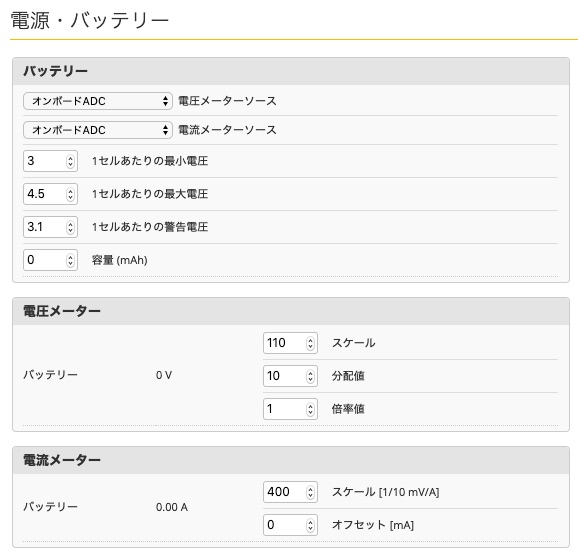
電源・バッテリー!
こんな感じに設定。
飛ばしながら詰めていけばと思います。
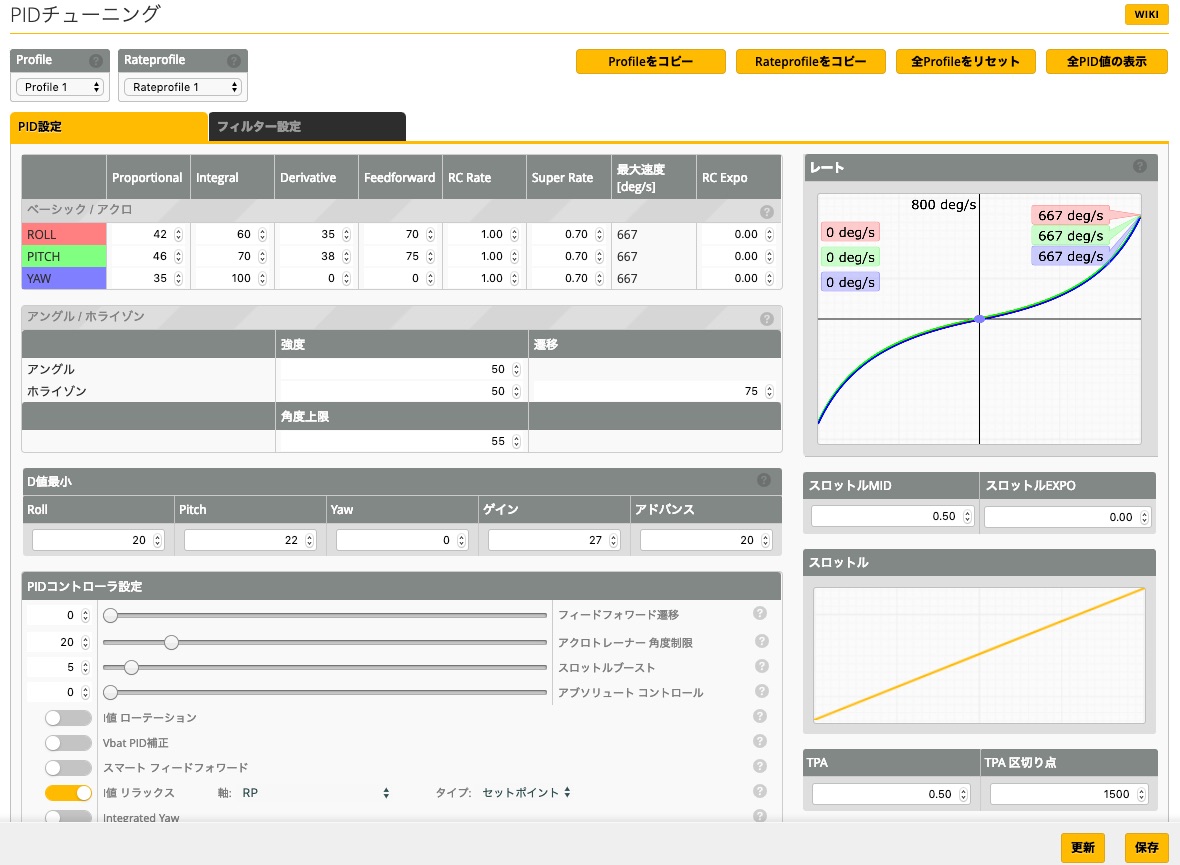
PIDチューニング!
PIDやRate設定はお好みで!
デフォルト値はこんな感じです。
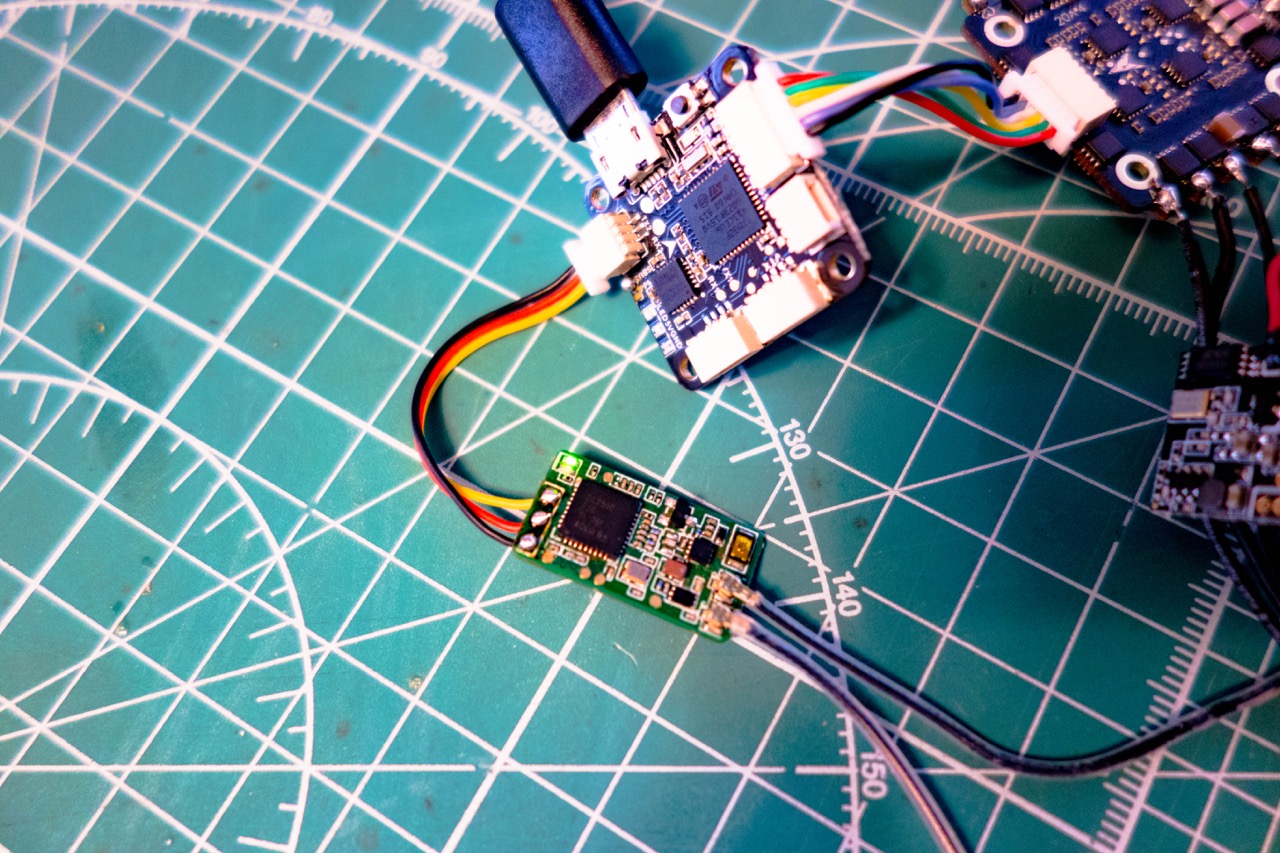
機体とのバインド!
ここまで来たら機体と送信機をバインドしておきまます。
今回受信機はFrsky xm+レシーバーを使っています。
Frsky xm+の場合、受信機のBINDボタンを押した状態で電源を投入することによりバインドモードとなります。(受信機の赤と緑LEDが点灯)
あとは送信機との通常バインド作業なので問題ないですね!
バインドが成功すれば受信機の緑LEDが点灯状態になります。
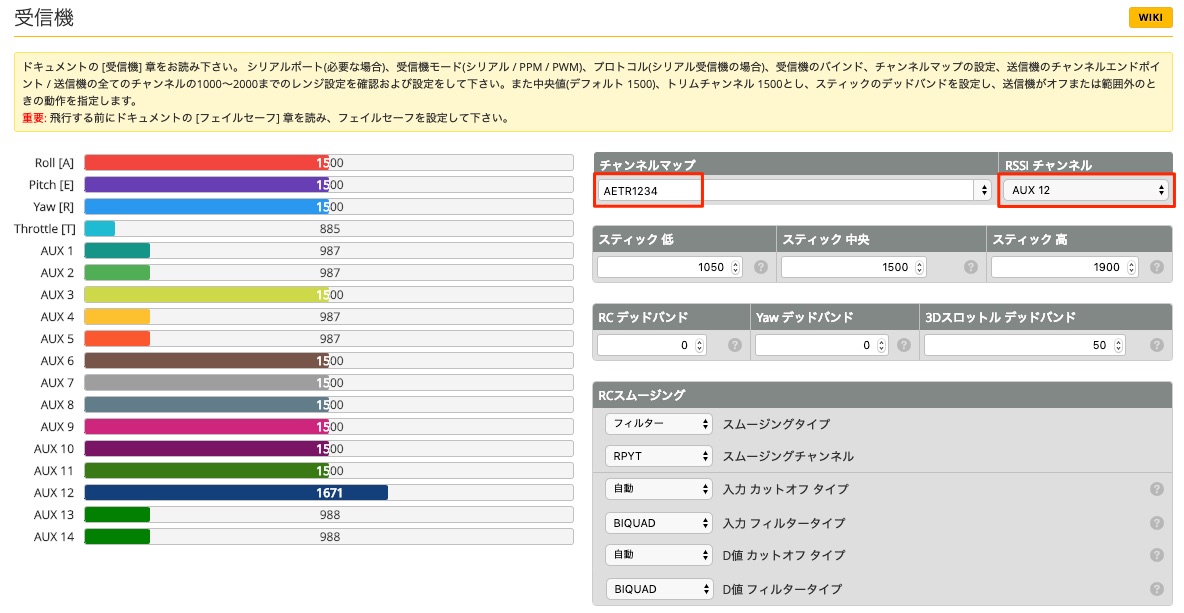
受信機!
送信機とのバインド作業が完了したら次に[受信機]タブへと移ります。
チャンネルマップをAETR1234に変更。
RSSIチャンネルをAUX12に変更。
モード!
初期状態で設定されている項目はなく、今回最低限の設定を追加しておきました。

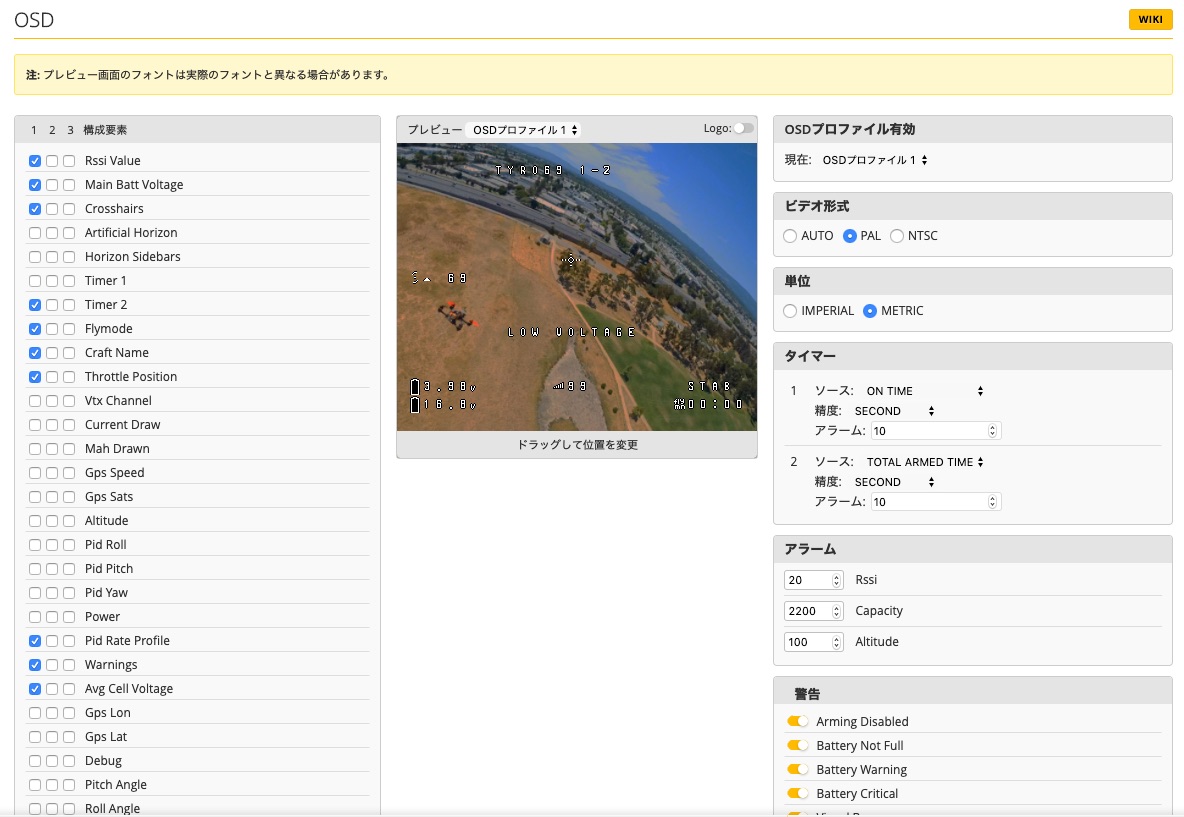
OSD!
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。
VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきましょう。
VTXのボタンを押して設定してもいいのですが、せっかくなのでBetaflightの[CLIコマンドライン]から設定しておきます。
set vtx_channel=1
set vtx_freq=5705
save
設定データの保存!
ここまで設定ができればBetaflightでの最低限の設定は完了です!
これまでの設定内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップを取って完了です。
BLHeliでモーター回転方向を設定!
今回、ESCへのモーター接続はこのように全て正回転で接続しました。
そこで2番と3番モーターをReversed設定し[Write Setup]で書き込んで完了です!

こんな感じでEachine Tyro69を最低限飛ばせる状態に設定できました。
あとはご自分の好みやスキル等で設定していけばいいと思います。
まとめ!
DIY Toothpickキット、なかなか面白いですね!
機体を組み上げ、とりあえず飛ばせる状態にできました。

デフォルト状態でもよく飛んでくれますが、カスタマイズ好きにはここからがこの機体の本当の楽しみとなるのかな?
HDカメラを積んでCinepick化してみるもあり・・・モーター変更でセル数アップさせぶっ飛び機体を作るのもあり・・・フレーム変更で大型化してみるもあり・・・となかなか面白そう!
この価格なので部品取りや自作機のベース機体とするもよしと自由度がありいいですね!
一回り大きな機体サイズのDIY Toothpickキット『Eachine Tyro79』なんてのもあるので、普段バリバリ飛ばされている方はこちらの選択肢もありですね。
私の場合おそらく手に余りすぎるかと思いますが・・・。
なかなかコスパ最高なDIY Toothpickキットですね!

Eachine Tyro69 105mm F4 OSD 2.5 Inch 2-3S DIY FPV Racing Drone PNP w/ Caddx Beetle V2 1200TVL Camera
 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  【Eachine Tyro69 105mm】DIY Toothpickを組み上げる!配線の取り回しやパーツの配置など勉強になるキットですね!
【Eachine Tyro69 105mm】DIY Toothpickを組み上げる!配線の取り回しやパーツの配置など勉強になるキットですね!  【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】  気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】
気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】  【Happymodel Sailfly-X】飛ばすまでの初期設定!バインドからBetaflight設定まで!
【Happymodel Sailfly-X】飛ばすまでの初期設定!バインドからBetaflight設定まで!  【Happymodel Larva X 100mm】飛ばせる状態にするまでのBetaflight基本設定&ブザーの取り付けをやってみる!
【Happymodel Larva X 100mm】飛ばせる状態にするまでのBetaflight基本設定&ブザーの取り付けをやってみる!  【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね! 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね! 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  【BETAFPV HX100 SE】BETAFPVの新しい軽量1セルToothpick HX100 SE。新規格BT2.0コネクタを採用でその飛びが気になります! 【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【BETAFPV HX100 SE】BETAFPVの新しい軽量1セルToothpick HX100 SE。新規格BT2.0コネクタを採用でその飛びが気になります! 【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】  【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!
【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!  Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!
Emax Tinyhawk Ⅱ Freestyleが登場!待望のカメラ&VTXが強化されています!


コメントを残す