
前回『【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!』の続きとなります。
この新しく相棒になった『Happymodel Larva X 100mm』を飛ばせる状態にするまでのBetaflightの基本設定とロスト防止のためブザーの設置をやってみました。
今回ご紹介する私の機体はFC内蔵受信機Frsky D8バージョンとなります。
もちろんD16でのバインドも可能となっています。
正直、このスペックの機体で野外で飛ばすにはFC内蔵受信機では少し心許ないので後日、外部受信機(Frsky xm+)を増設予定です。(手元にレシーバーのストックがなくて)
搭載されているVTXは200mW出力が可能な『Happymodel Diamond VTX』が使われています。
このVTXの特徴として、1280×720(25FPS)の解像度で録画が出来るDVR機能が搭載されています。

Mobula7やTRASHCANなどで使われている三角形のWhoop_VTXにDVR機能が付いた新しいVTXとなります。
前回機体を解体して内部構成をチェックした際に、録画のオンオフが毎回面倒なようであればこのWhoop_VTXに変更してゴーグルからの録画でいいかな?なんて考えていましたが、やはりVTX搭載のDVRだけありかなり綺麗な録画が出来るのでこのままの構成でいこうかと思います。(25FPVってのが微妙なんですが!)
またブザーの取り付けもやってみました。
最近では墜落や激突等あまりなくなりましたが(Toothpickはかなり慎重に飛ばしているから?)やはり野外機は付けれるならブザーの設置は必須になるかと思います。

それでは設定をやっていきましょう。

目次
【Happymodel Larva X 100mm】ブザーの取り付け & Betaflightの基本設定!

ブザーの取り付け!
まずはブザーの取り付けをやっていきます。
これは前回、機体を解体した際にやってしまいましたがFCのブザーポートへのはんだ付け作業だけなので問題ないですね!

付属のマニュアルを参考にブザーを取り付けます。

後日、Frsky xm+受信機の取り付けも考えていますが受信機とブザーはスペース的にキャノピー内に収めることは難しそうなのでフレームに固定する形となります。
Betaflightの基本設定 & バインド作業!
次にBetafilghtの設定に移ります。
飛ばせる状態にするまでの基本的な設定に限定したいと思います。
PIDやRates等々はお好みで変更して下さい!
初期状態の設定を保存!
まずはストック状態の設定を保存しておきます。
[CLIコマンドライン]からdump allでファイルを保存しておきます。

ポート設定!
次にポート設定です。
初期状態で特に問題なさそうですね。

UART1にSmart Audio機能が割り当てられています。
外部受信機を増設の際は、FCのTX1ポートに配線されているSmart Audio端子をTX2に配線しIRX1ポートに受信機のSBUS入力、UARTの設定も変更する必要がありそうです。
これは次回、受信機増設の際に詳しくご紹介したいと思います。
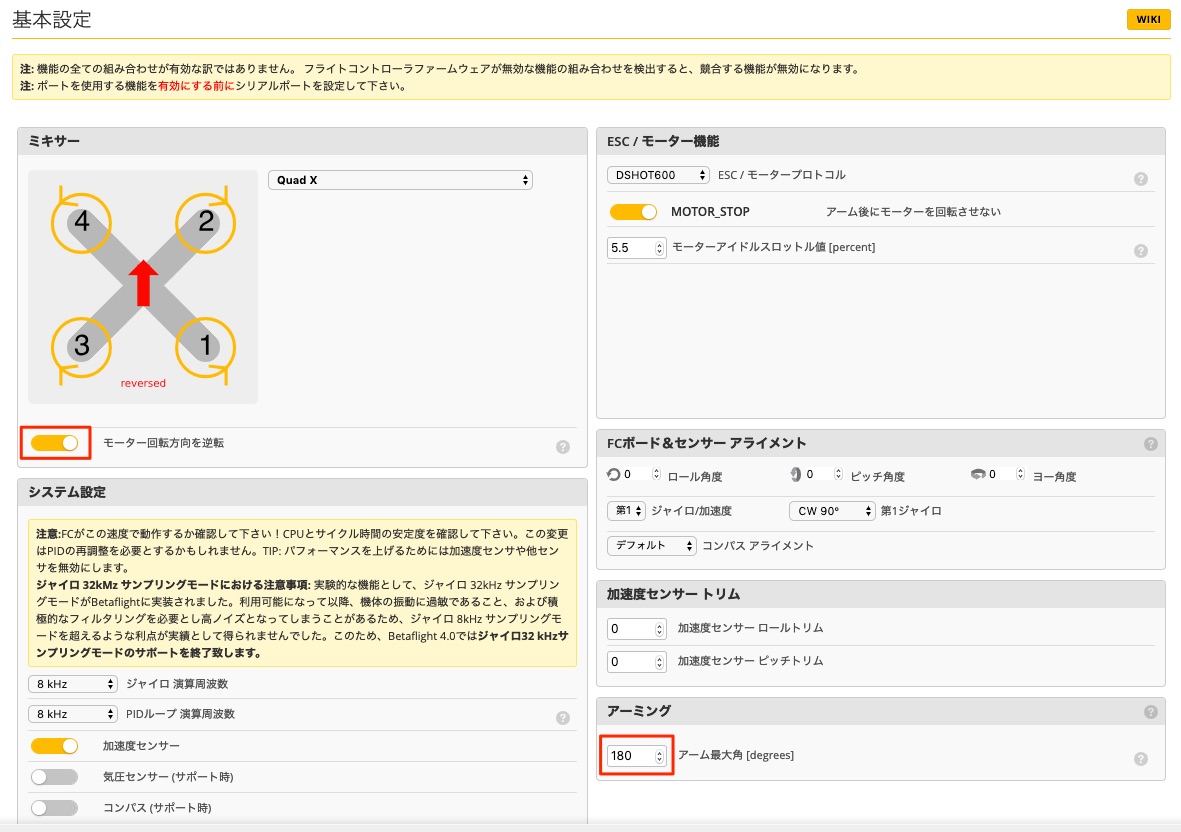
基本設定!
まずは、[モーター回転方向を逆転]に設定にしました。
Whoopの場合、この逆転設定でプロップウォッシュ対策に効果的でしたがToothpickにこの設定はどうなのか?
このあたり効果があるか?理解しきれていませんが、デフォルトの正回転設定のままで設定したEmax Tinyhawk Freestyleでは特に問題はなく・・・

手持ち機体のペラの向きを統一させるという意味合いで今回逆転設定にしています。(こちらも特に問題はありませんでした)
ペラごとモーターを付け替えてもいいのですが、(赤配線モーターと黒配線モーターを入れ替える)今回はペラのみ入れ替え、BLHeliから全モーターにReversed設定をしています。
これは後ほどご説明します。
モーターアイドルスロットル値は他の機体に比べると少し高めに設定されています。
私の場合、他の機体は6.0〜6.5あたりまで上げていますが今回は初期状態の5.0で様子を見たいと思います。
アーミング角度は180°に設定されているので問題ないですね。
受信機設定はデフォルトでFRSKY_D(D8モード)が設定されています。
今回はこの設定でいきたいと思いますが、もちろんFRSKY_X(D16モード)も使えます。

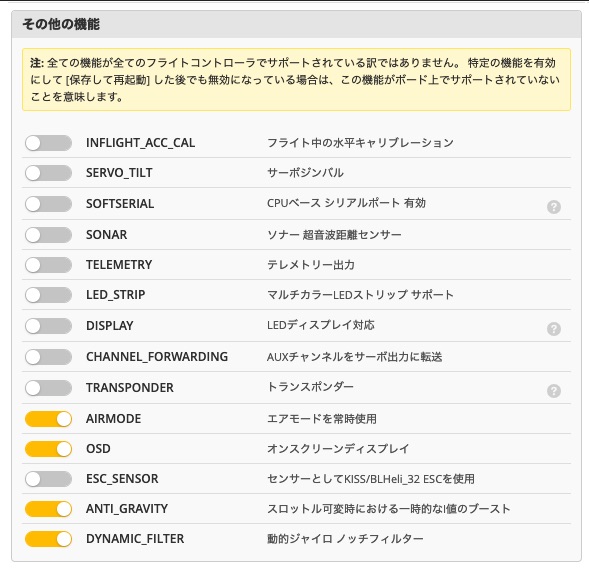
その他の設定も問題ないようですね。
AIRMODEは常時使用がオンになっています。
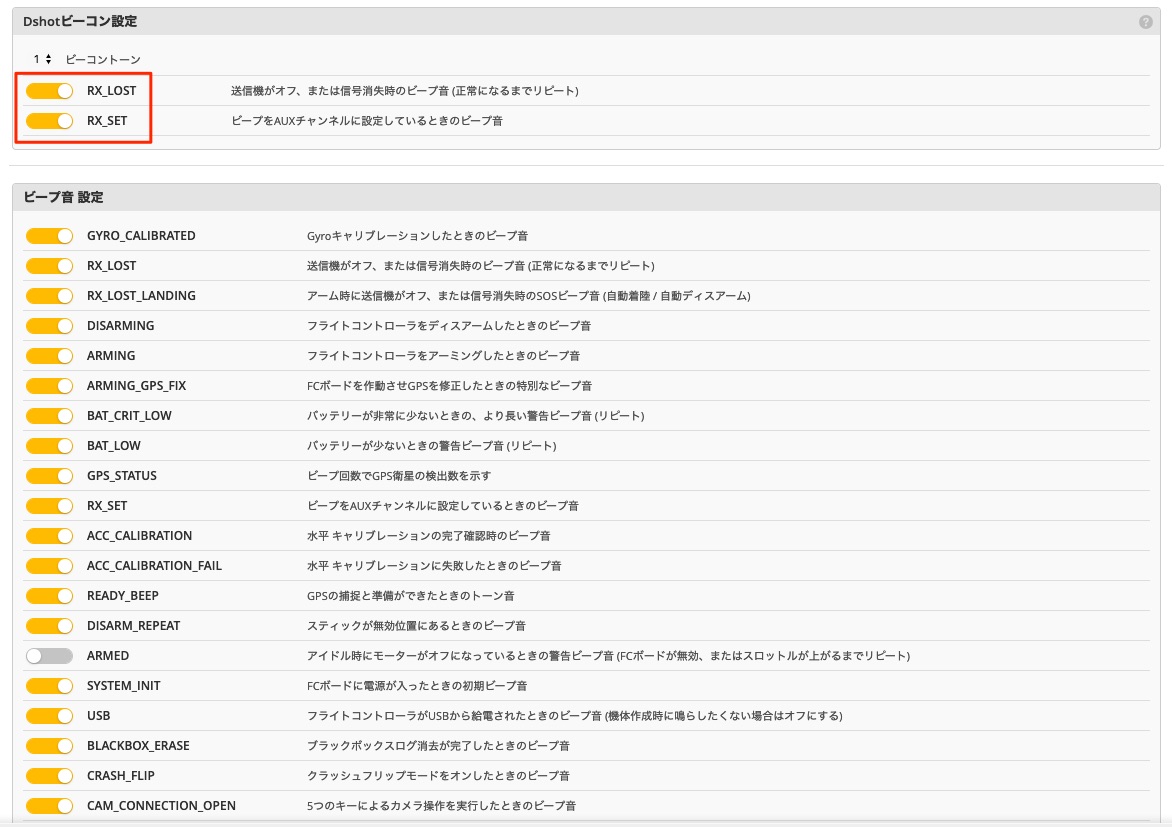
[DSHOTビーコン設定]がオフになっていたのでオン設定にしました。
あとは特に問題なさそうです。
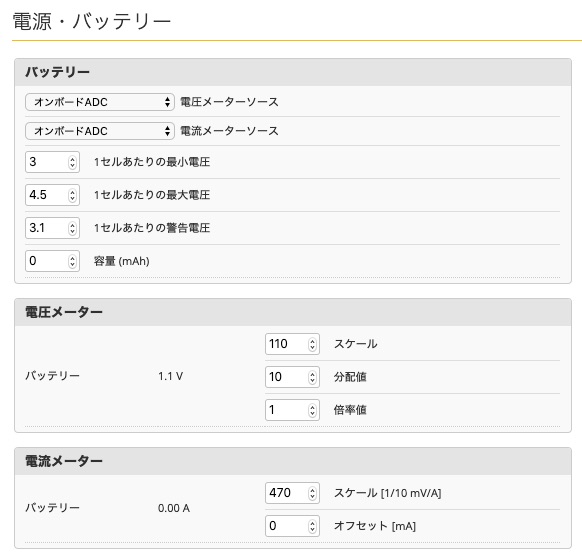
電源・バッテリー!
最大電圧値を4.5Vまで上げ、警告電圧等少し下げこのあたりに設定。
飛ばしながら詰めていけばと思います。
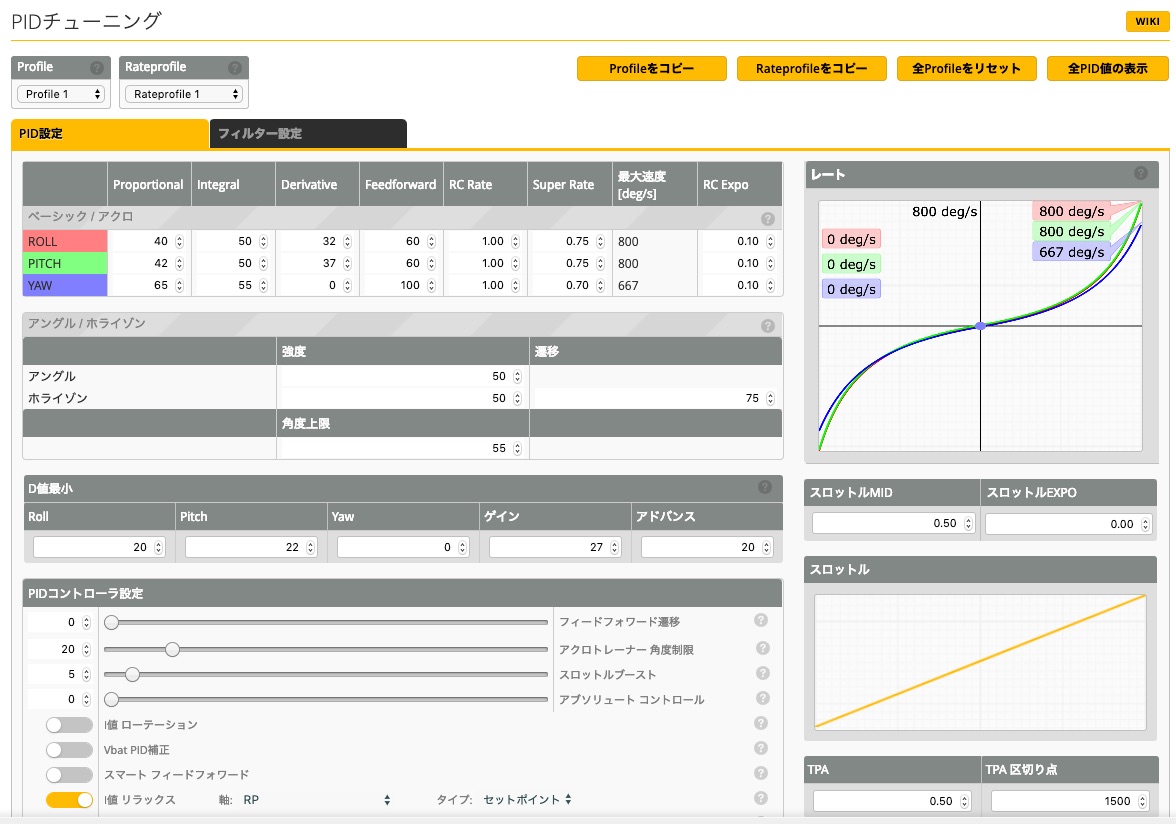
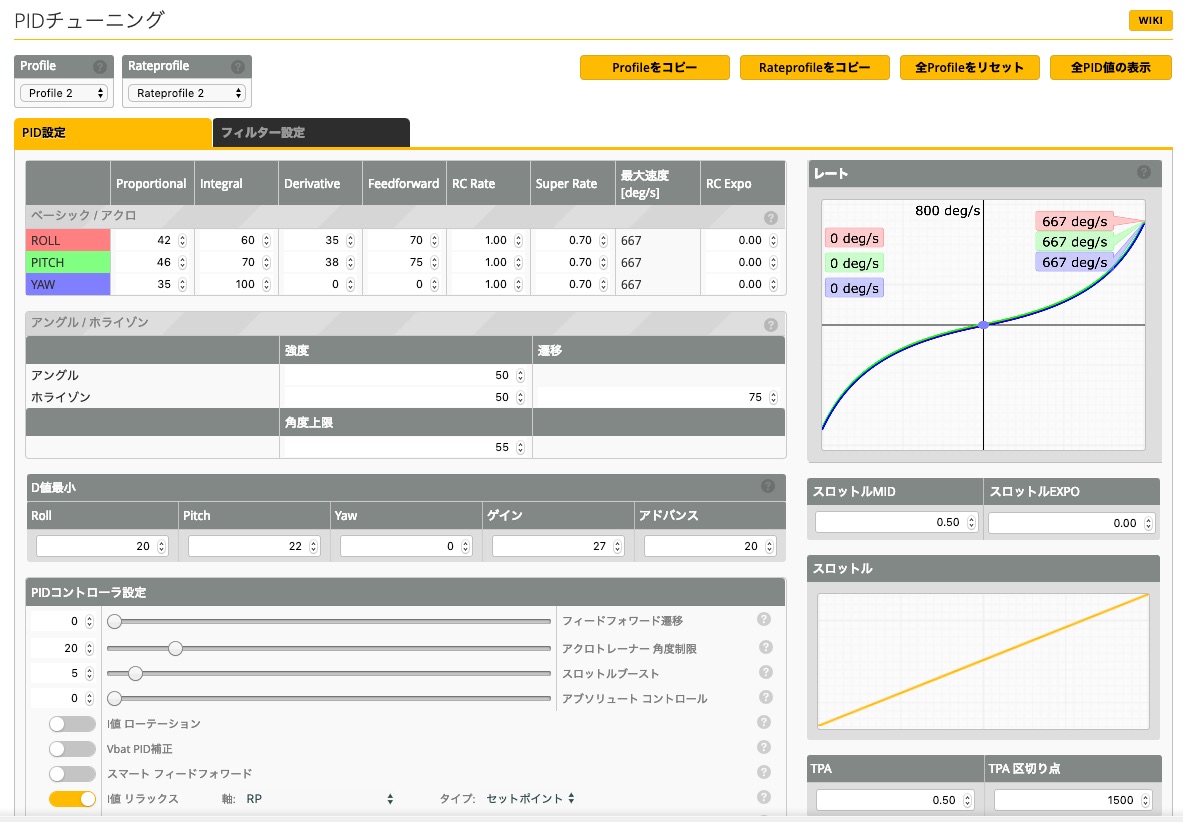
PIDチューニング!
PIDやRate設定はお好みで!
デフォルトのPID値はこの2パターン。
機体とのバインド!
ここまできたら機体と送信機のバインド作業に移ります。
これも前回機体を解体した際にFCのバインドボタンを押してやってしまいましたが、キャノピーを取り外しFCの物理ボタンを押すのも大変なので、[CLIコマンドライン]から設定していきます。
USB接続でBetaflightに接続した状態で(バッテリー接続の必要はありません!)CLIコマンドラインから、bind_rx_spiを打ち込みバインドモードに入ります。
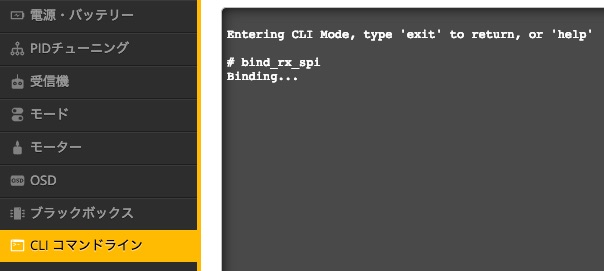
あとは送信機との通常バインド作業なので問題ないですね!
バインドが完了したら再度Betaflightに接続し設定を進めていきます。
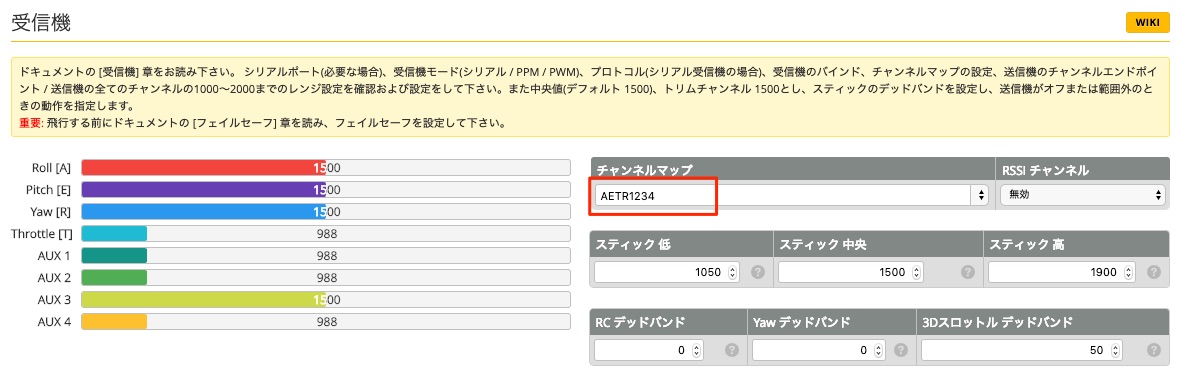
受信機!
送信機とのバインド作業が完了したら次に[受信機]タブへと移ります。
チャンネルマップを[AETR1234]に変更。
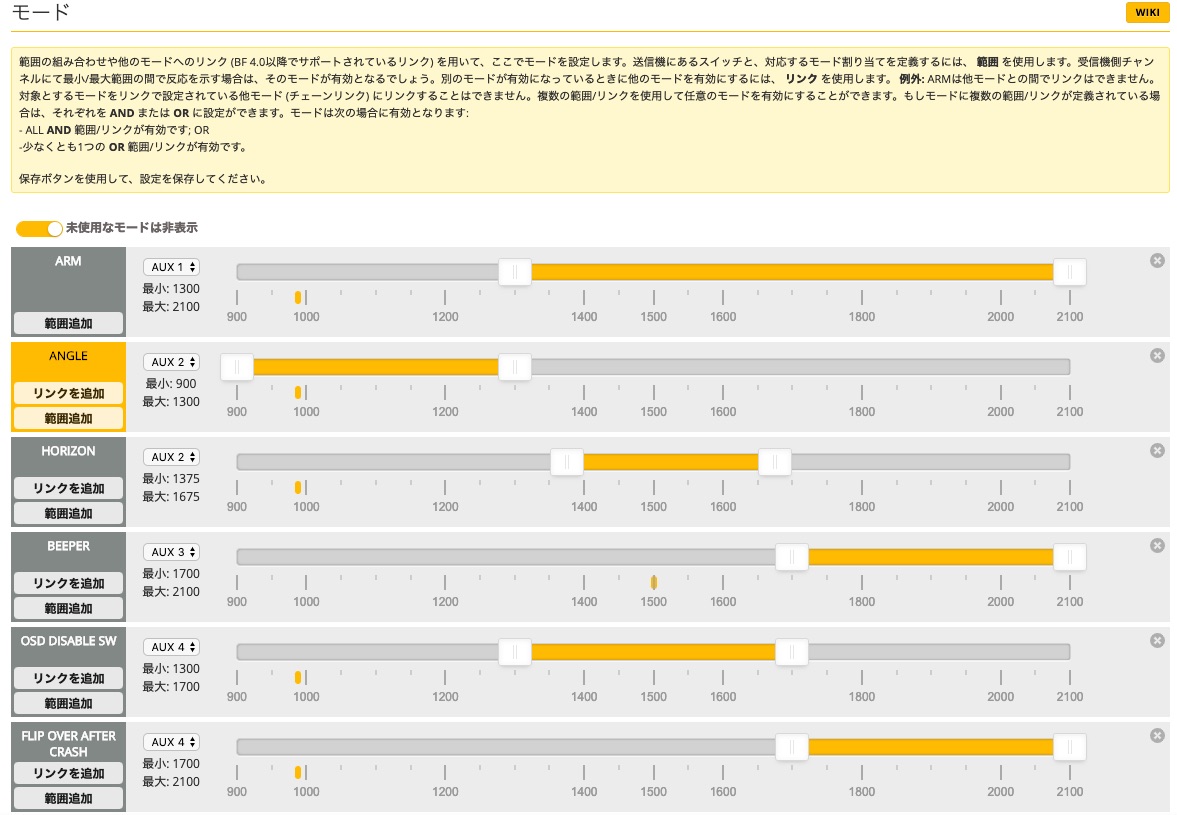
モード!
初期状態で設定されているのは、ARMとHORIZONのみ。
最低限必要な設定を追加しておきます。
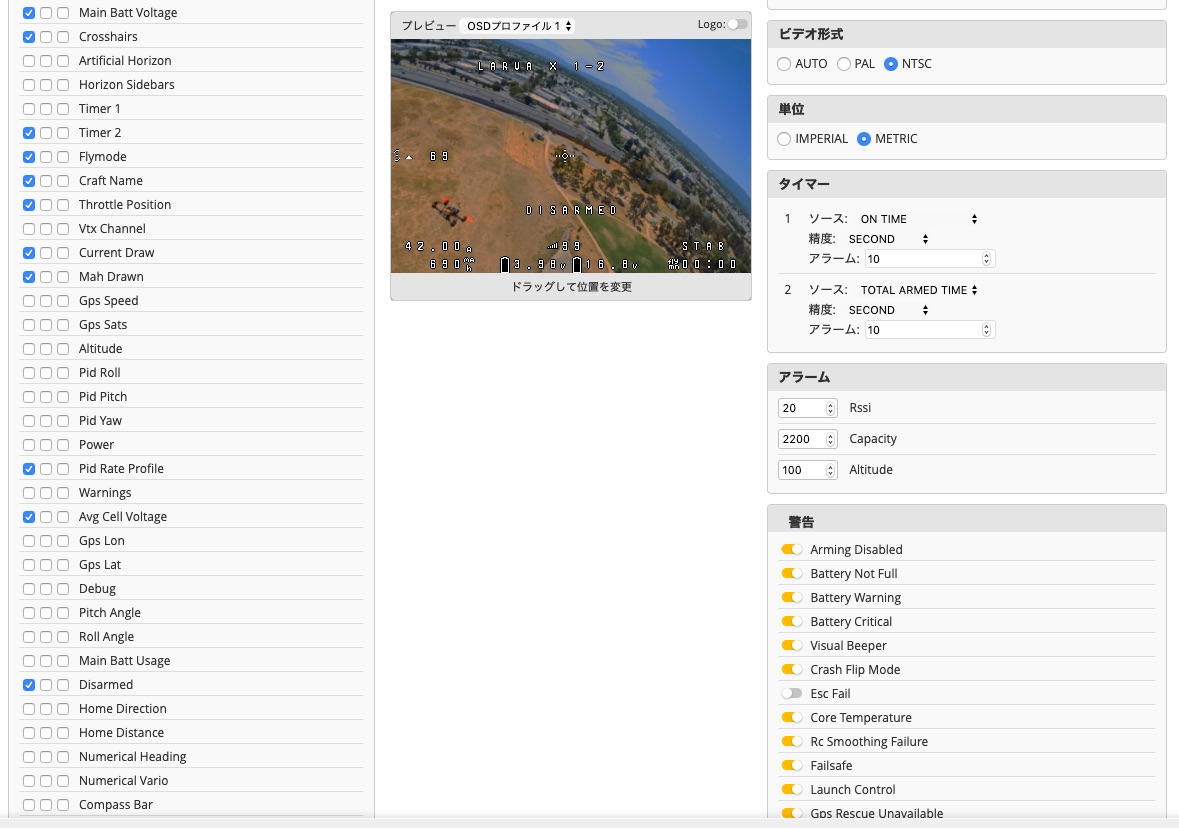
OSD!
こちらはお好みで設定して下さい。
いつも私はこんな感じにしています。
VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきましょう。
VTXの物理ボタンを押して設定してもいいのですが、[CLIコマンドライン]からの方が簡単なのでこちらで設定。
set vtx_channel=1
set vtx_freq=5705
set vtx_power=3 (200mW)【vtx_power=1(25mW)、vtx_power=2(100mW)】
save
設定データの保存!
ここまで設定できたらBetaflightでの最低限の設定は完了です!
これまでの設定内容を[CLIコマンドライン]からdiff allで差分バックアップを取って完了です。
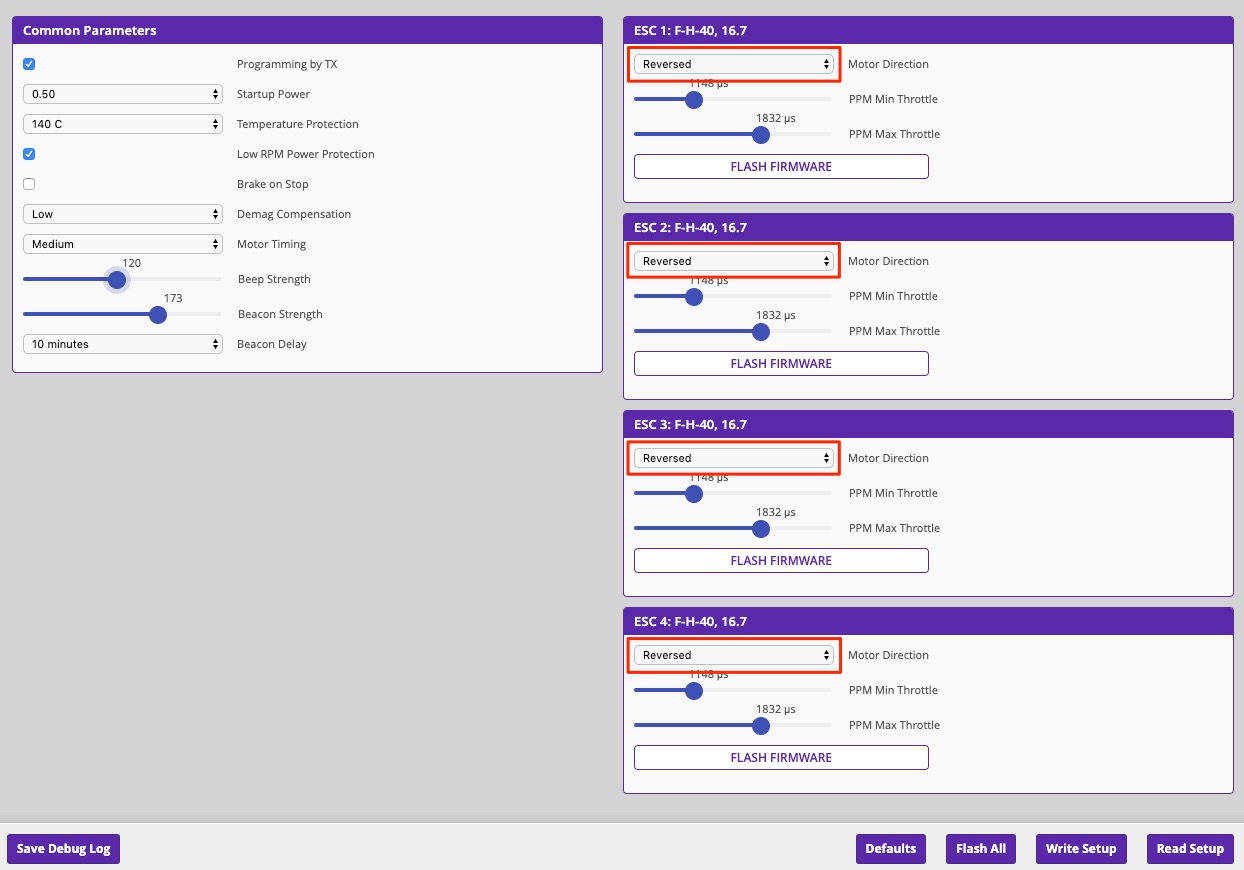
BLHeliでモーター回転方向を設定!
今回モーター回転方向を逆転設定にしました。
そしてモーターは入れ替えずペラの入れ替えのみ行いました。

BLHeliから全モーターにReversed設定して完了です。
まとめ!
こんな感じでHappymodel Larva Xを飛ばせる状態に設定できました。
あとはご自分の好みやスキル等で設定していけばいいかと思います。
あとは早く受信機の増設をやりたいのですが、手持ちのFrsky xm+が底をついてしまい・・・(もうすぐ届くはず!)
私の機体はFC内蔵のFrsky D8受信機バージョンなんですが、Frsky xm+受信機バージョンも販売されているようなので機体に興味を持たれている方は、はじめからこちらのバージョンを選択されるのもいいかもしれませんね!



 HX100 SEが面白すぎて2号機を作ってしまいました!
HX100 SEが面白すぎて2号機を作ってしまいました!  【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!
【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!  【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!
【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!  【BETAFPV HX100 SE FPV Quad】新規格BT2.0コネクタ採用BETAFPVの新しい1セルToothpick HX100 SEがやって来た!
【BETAFPV HX100 SE FPV Quad】新規格BT2.0コネクタ採用BETAFPVの新しい1セルToothpick HX100 SEがやって来た!  【 Happymodel Sailfly-X】外部受信機(Frsky xm+)増設。これでCaddx Turbo EOS2カメラ&200mW出力VTX&フルレンジレシーバーのSailfly-X完成!
【 Happymodel Sailfly-X】外部受信機(Frsky xm+)増設。これでCaddx Turbo EOS2カメラ&200mW出力VTX&フルレンジレシーバーのSailfly-X完成!  いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】
いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】  【Emax Tinyhawk Ⅱ RACE カスタマイズ】ピッグテールを交換。2セル&BT2.0バッテリー使用可能な変換ケーブルを作成!
【Emax Tinyhawk Ⅱ RACE カスタマイズ】ピッグテールを交換。2セル&BT2.0バッテリー使用可能な変換ケーブルを作成!  【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!
【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!


コメントを残す