
Emax Tinyhawkシリーズの新機体『Emax Tinyhawk Ⅱ RACE』がお仲間になりました!
Tinyhawkシリーズの機体は、ほんと飛ばしやすくてよく飛んでくれます。
ホイールベース90mmの2セル2インチサイズの小型ToothpickとなりWhoop形状のTinyhawk Ⅱのレースバージョンとして登場しました。

名前にRACEという文字が入っていますが、飛ばしてみた感じではTinyhawk ⅡのToothpick版といったところでしょうか。
Toothpick形状になりモーターサイズも大きくなっているのでパワーは上がっています。
そして野外で飛ばす機体は普段Angleモードで飛ばすことはないのですが、75mm Whoopほどのサイズなので公園やちょっとしたスペースでAngle飛行なんてのも楽しいかと思います。

そしてこれまでのTinyhawkと違い、Tinyhawk Ⅱと同じキャノピーが使われカメラ角度の調整が出来るようになっているのがいいですね。

今回、このTinyhawk Ⅱ RACEを飛ばせる状態にするまでのバインドから最低限のBetaflight設定をやっていこうかと思います。
Betaflightファームウェアは標準でBTFL4.1.0が使われています。
ほぼデフォルト設定で問題ないと思います。
4.1.0では新たにVTXテーブルが採用されていますが、これ便利なのかな?
毎回設定に手間取っています。
またTinyhawkシリーズの機体は共通して同じ5A ESC内蔵FCが使われていますが、それに直付けされているVTXの設定も毎回手間取りと・・・
Tinyhawk ⅡのBetaflight設定でもこれに関していろいろとコメントやお問い合わせを頂きました。
個人的には大好きなTinyhawkシリーズの機体なんですが、毎回ここで躓きます。
まぁ、サクッと設定していきましょうか。
目次
【Emax Tinyhawk Ⅱ RACE】バインドから最低限のBetaflight設定をやってみる!

Betaflight設定は、ほぼデフォルトの状態で問題なく飛ばすことができました。
PIDやRates等の設定はあまりさわる必要はないと思います。(Tinyhawkシリーズの機体はうまくチューニングされている印象です)
また、Angleモードで飛ばしても面白い機体でした。
Angleリミット等かなり低い値に設定にされているので変更した方がいいかもしれません。
それではBetaflight設定をやっていきます。
初期状態の設定を保存
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
ポート設定
【ポート】設定はデフォルト設定で特に問題なさそうですね。

基本設定
標準では[モーター回転方向を逆転]に設定されていません。
今回はこのままで進めていきます。
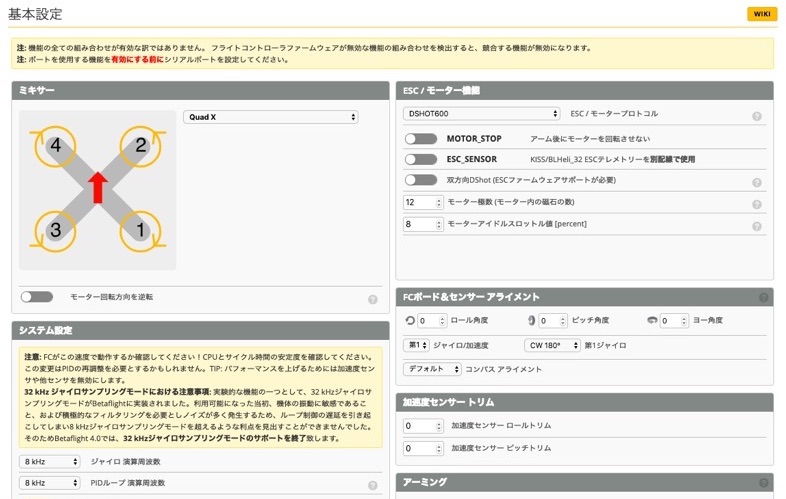
変更箇所を中心に見ていきます。
アーム最大角はデフォルトでは60°に設定されていましたが、180°に変更しました。

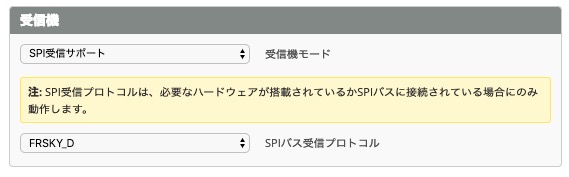
受信機設定はデフォルトのFRSKY_D(D8モード)のままでいきます。
FRSKY_X(D16モード)に変更も可能です。
[AIRMODEを常時使用]はデフォルトではONになっています。
Angleモードで飛ばしても面白い機体なので、OFFに変更しました。
後述する【モード設定】でAcroモードでの飛行時のみAIRMODEを入れる設定にしました。

[Dshotビーコン設定]のRX_LOSTがOFFになっていたのでON設定に変更しました。

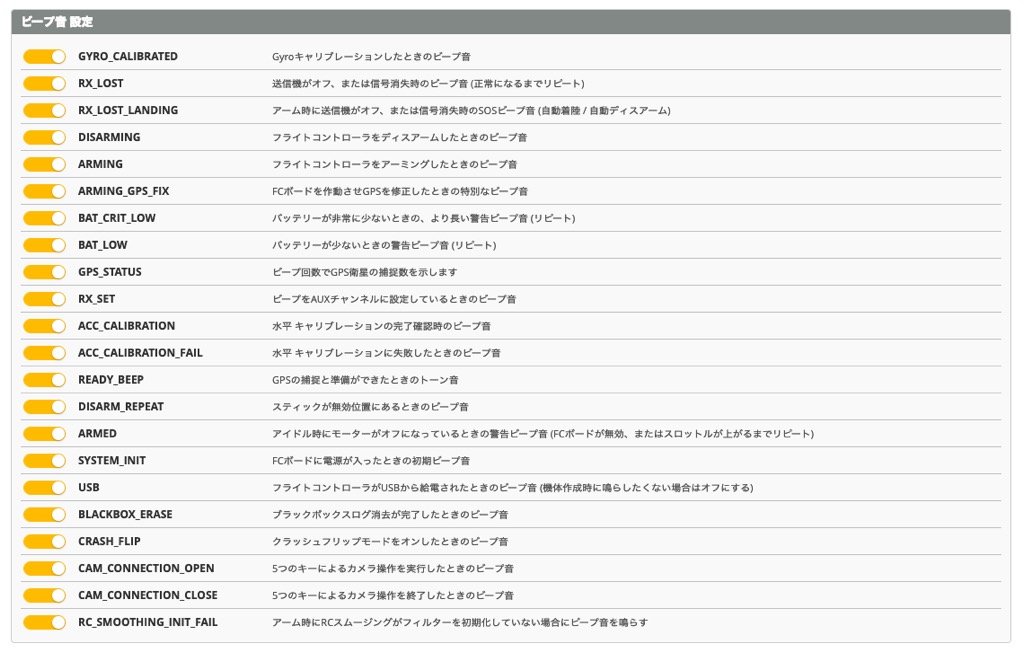
あと[ビープ音 設定]はデフォルトでは全てオフになっています。
関係ない項目もありますが全てオンに変更しました。
問題ないでしょう。
あとはデフォルトのままで問題なさそうですね。
電源・バッテリー
こちらは特に変更する必要はなさそうです。

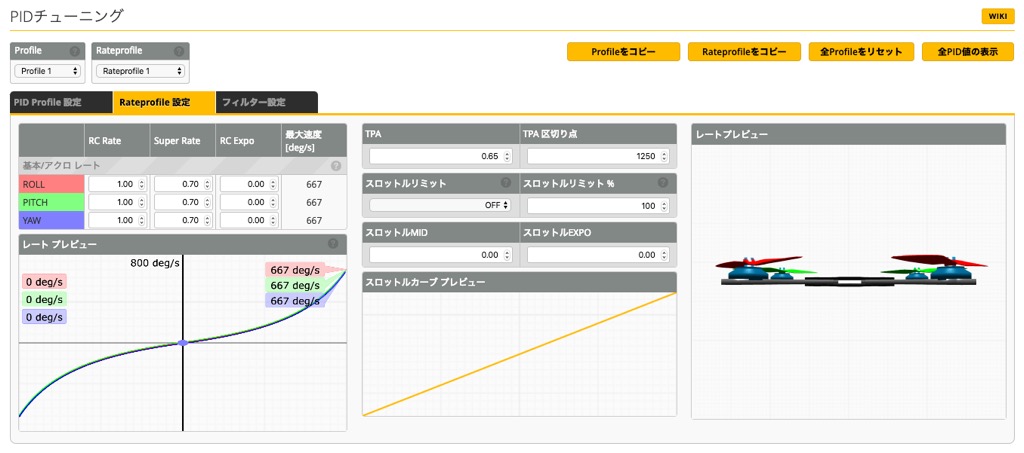
PIDチューニング
PID Profileは2つ、Rate Profile1が独自設定値になっているようです。


1セル飛行はPID Profile1、2セル飛行時はPID Profile2を使えということなのかな?
TinyhawkSやTinyhawk Ⅱでは接続するバッテリーのセル数により自動的にPID設定が切り替わっていましたが、この機体はそのような設定にはされていないようです。
機体とのバインド!
ここまで来たら機体と送信機をバインドさせます。
CLIコマンドラインからやってしまいましょう。
【CLIコマンドライン】から、[bind_rx]入力でバインドモードに入ります。
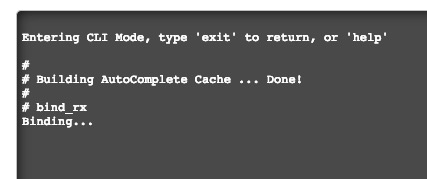
あとは送信機側もバインドモードにし機体とのバインドを完了させて下さい。
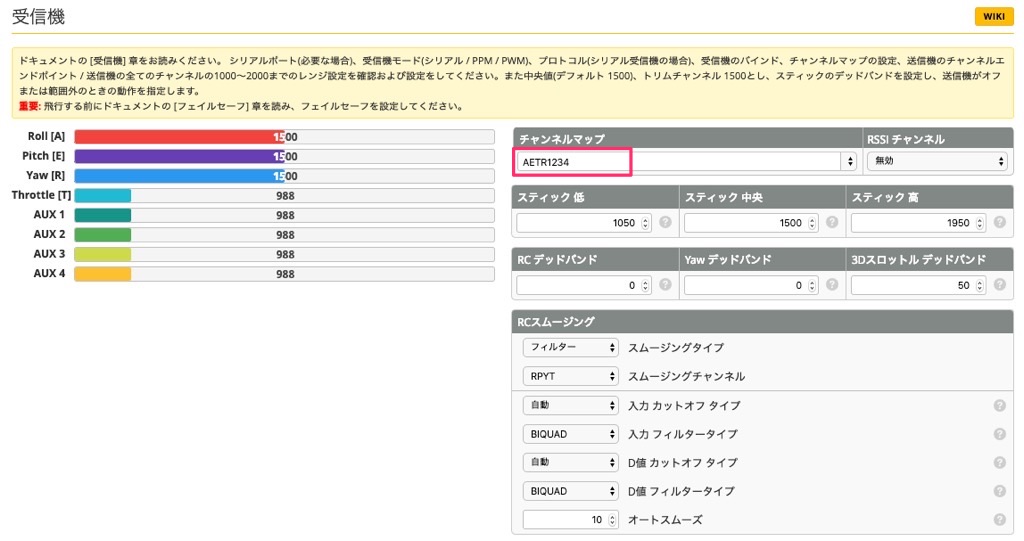
受信機
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
チャンネルマップを[AETR1234]に変更して完了です。
モード
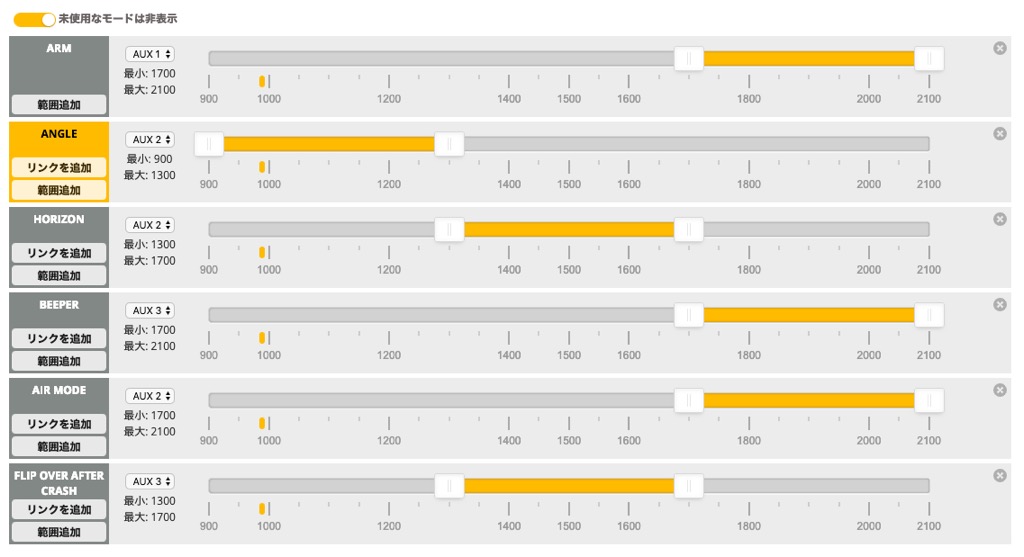
次に【モード】設定です。
こちらがデフォルトで設定されている項目です。
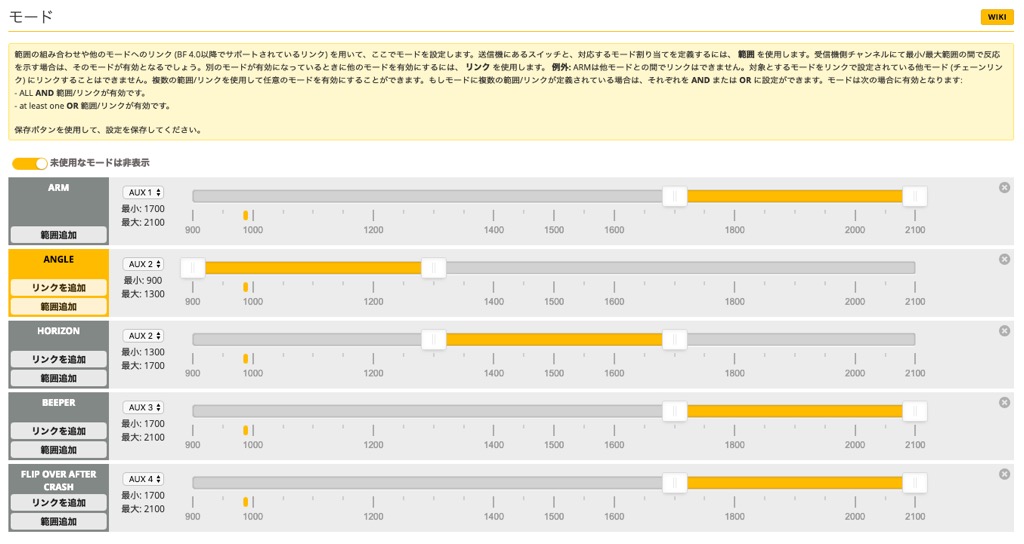
最低限の設定がされているのでこのままでも問題はなさそうですが、[AIR MODE]の設定を追加しました。
モード切替でAcroモードの時だけこのAIR MODEが入るように設定しました。
OSD
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。

映像伝送用送信機
VTXの周波数も設定しておきましょう。
Betaflight 4.1からVTXテーブルというものが採用され、私なんかはまだ全ての機体を移行しきれていなく慣れていないため手間取りました。
以前Tinyhawk Ⅱで作成したファイルをそのまま読み込めば設定完了と便利なようですが・・・
1から設定していくとSmart Audioが機能しなかったり、出力設定を変更するとVTXテーブル自体が消える(起動しなくなる)・・・など、まだまだ理解しきれていません。
そしてTinyhawkシリーズの機体はVTXに初期状態ではロックがかかっている?(使用地域の違い?)
ようで、ダブルでややこしくて・・・
まずはこのVTXのロック解除をやっておきます。
作業自体は簡単です。
VTX基盤上にあるスイッチを押した状態でバッテリーを接続すればLEDが点滅してロックが解除されます。(USB給電ではなくバッテリーを接続してください!)

そしてVTXテーブルの設定をやっていきます。
以前作成したファイルを読み込んで簡単に設定できましたが、理解しきれていない部分があったので今回1から設定してみました。
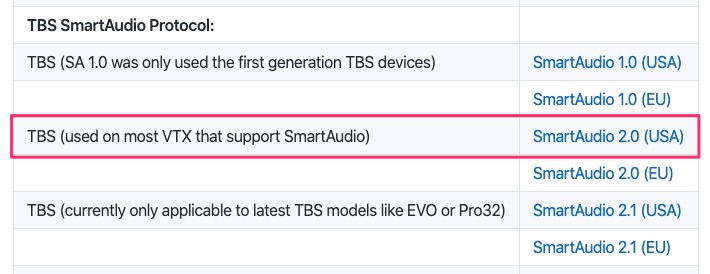
まずはVTXテーブルで使用するファイルをこちらから入手します。
参考 VTX TablesGitHubSmart Audioのバージョンにより設定ファイルが異なりますが、Smart Audio2.0対応ファイルで問題ありません。
JSON形式のファイルを一旦PCに保存後、[ファイルからロード]から読み込みます。

送信出力レベル値のラベルを変更。

あとは[モード選択]からバンド&チャンネル、送信出力をご希望値に合わせて完了となります。
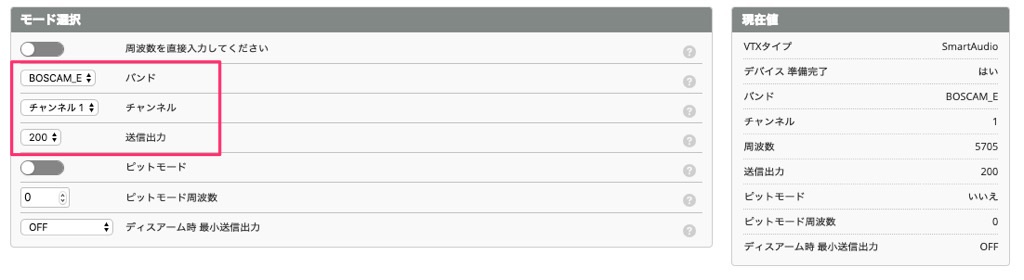
国内で使用できる周波数帯のみ残し使用しない項目は[0]にすることにより選択できないようにも出来ます。(もっといい方法ありそうですが!)

こちらも参考にしてみて下さい。

設定データの保存
これでBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を【CLIコマンドライン】から保存しておきます。
[diff all]で差分バックアップを取って完了となります。
まとめ!
こんな感じでEmax Tinyhawk Ⅱ RACEを飛ばせる状態に設定できました。
あとはご自分の好みやスキル等に応じて設定を調整していけばいいと思います。
普段野外でAngleモードで飛ばすことはないのですが、ちょっとしたスペースのある公園で1セル or 2セルAngleモードなんて飛ばし方でも楽しめる機体でした。(機体が小さいのでWhoop感覚で!)
かと言っても2セルではパワー持て余しちゃいますが・・・

Angleモードで飛ばすのがメインという方はPID設定の項目でAngleリミットなど調整して下さい。
デフォルトではかなり低い値となっているので飛ばしにくいかと思います。

かなり面白い機体なのでいろいろとやってみたいのですが、コロナの影響でなかなか外に飛ばしに行く事ができず・・・
あと今回ご紹介出来ませんでしたが、こんな小さな機体ですがかなりスピードも出せるのでブザーの設置は早めにやった方がよさそうですね!






初めまして。この機体の初期設定を消してしまいました。初期データのコピー頂けますでしょうか。
よろしくお願いいたします。