
Emax Tinyhawkシリーズは、白色の1セルWhoop『Tinyhawk』や2セル『TinyhawkS』、そしてToothpick『Tinyhawk Freestyle』を飛ばしてきましたが、Tinyhawkと名が付くものはどれも飛ばしやすくてよく飛んでくれます!
どの機体も思い入れがあり大好きな機体なので、これまでいろいろと手を加えてきました。
そんなTinyhawkシリーズの新機体『Emax Tinyhawk Ⅱ』がやって来ました。
Tinyhawkシリーズの完成形ともいえる機体だと思います。
これまで個人的に気に入らなかったVTXがアップグレードされ、そしてこれはTinyhawkユーザーの方が待ち望んでいたであろうカメラがRunCam Nano2にアップグレード、カメラ角度の調整も可能となっています。


個人的に今までのTinyhawkシリーズの機体で共通して使われている600TVLのカメラは逆光に弱く、また曇りの時など光量不足の場合ノッペリした映像で、これがまた見にくく・・・
Tinyhawk Freestyleの方では早々にEOS2カメラに載せ替えました。
Whoop形状のTinyhawkもそんな理由からカメラ交換をしたかったのですが、独自形状のフレーム&カメラが使われているためカメラの変更はなかなか難しく断念していました。
今回、Tinyhawk Ⅱではカメラ角度が調整できる専用フレームが採用されこれが可能となっています。
Tinyhawkユーザーからの要望が多かったのだと思います。
これでカメラ角度の調整や標準のRunCam Nano2カメラに加えEOS2カメラなんかにも載せ替えができます。
TinyhawkSユーザーの方はフレーム変更により簡単にTinyhawk Ⅱ仕様の機体にできそうです。(フレームのみの販売はまだされていないようです)
軽量2セルWhoopとなり、TinyhawkSを飛ばしたことがある方はご存知だと思いますが2セル飛行はかなりスピードが出る機体となります。
飛びに関してはTinyhawkSとあまり変わりませんが、カメラ変更&カメラ角度の調整が出来るのは大きく、かなり飛ばしやすくなります。

今回、このTinyhawk Ⅱを飛ばせる状態にするまでのバインドから最低限のBetaflight設定を見ていこうかと思います。
ほぼデフォルト状態でも飛ばしやすいと思います。
また標準のピッグテールはJST-PH2.0となり1セルでの飛行も可能となっています。
バッテリーまわりの変換プラグを自作しておけば便利に飛ばせられるので後ほどご紹介します。
また野外飛行ではブザーがあると心強く、今回ついでにやりたかったのですが・・・
これまでのTinyhawkではモーターの配線はFCへのプラグ接続式だったのが、Tinyhawk ⅡではハンダでFC直付けに変更され作業は非常に厄介となります。
このあたりも見ていきましょう。
目次
【Emax Tinyhawk Ⅱ】バインドから最低限のBetaflight設定をやってみる!

ブザーの取り付けは非常に厄介!
Betaflight設定を見ていく前に少しブザーの話を。
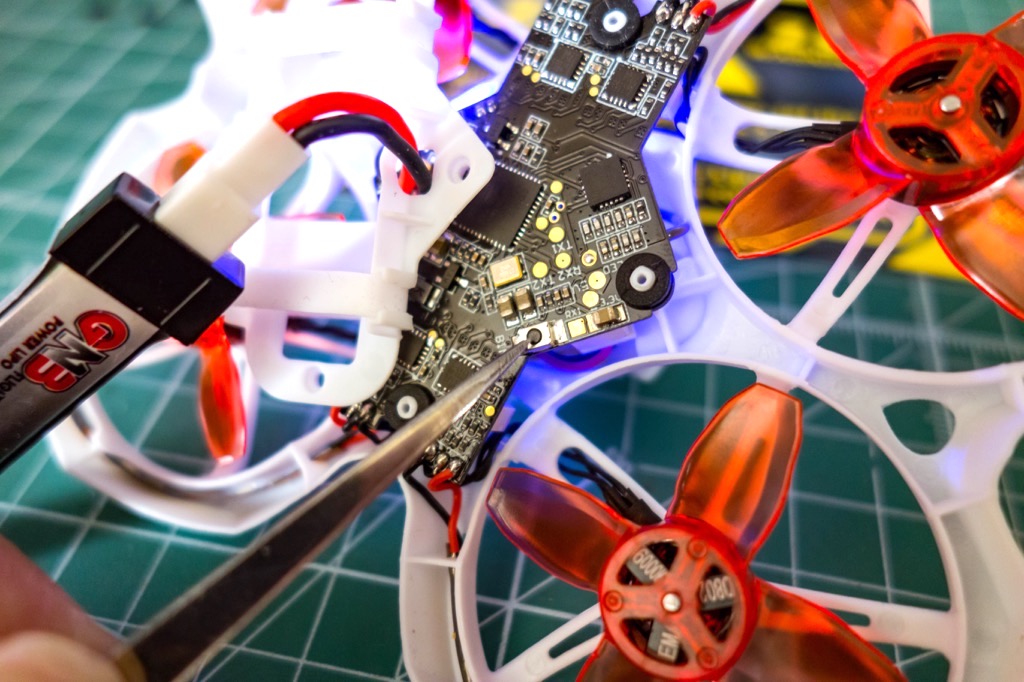
これまでのTinyhawkシリーズの機体と同じFCが使われているので、FCのブザーポートにハンダ付け・・・が出来れば簡単なんですが・・・
モーターケーブルがFCに直付けとなっているので、モーターを外しても作業スペースが取れなくてかなり厄介となります。
モーターを外した状態でもブザーをハンダする作業スペースがとれないので、ブザー設置には一旦モーターを全て外す必要がありそうで少し大変な作業となりそうです。

よく見てみるとFCの裏にLEDポートがあったので、こちらにブザーを接続し以前別の機体で試したリソースを振り直す方法を試してみたのですが・・・どうもうまく動作してくれず。



という事で今回ブザーの設置はパスします。
後々、受信機(Frsky xm+)の増設もしたいと考えていますが、カスタマイズのことを考えると非常に面倒な構造になっているのが残念なところですね!
【追記】何とかブザー取り付けました!

変換プラグを用意すれば便利です!
自作しておくとTinyhawk Ⅱを快適に飛ばす事ができる変換プラグの話も少し。
簡単に作成でき非常に便利なのでご紹介しておきます。

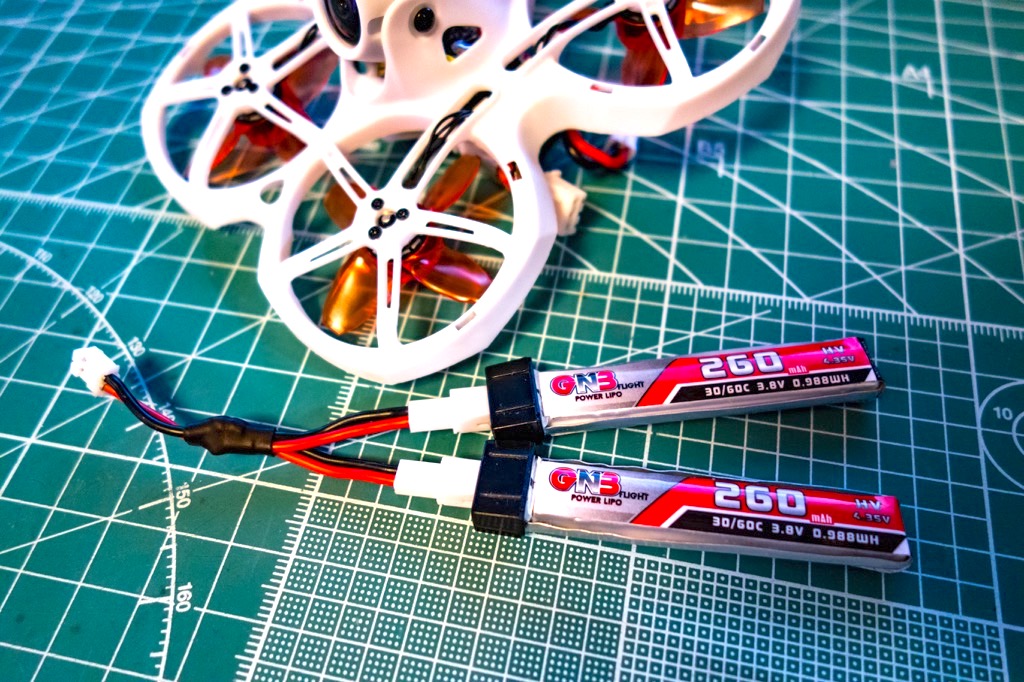
まずTinyhawk Ⅱのピッグテールには1セル2セル共通で機体本体にはJST-PH2.0プラグが使われています。
1セルWhoopなんかでお馴染みですね。
そして付属する2セルバッテリーもこのタイプのプラグが使われたものが採用されています。
普段2セル機を飛ばされている方ならご存知だと思いますが2セルバッテリーの多くはXT30プラグが使われています。
私の手持ち2セルバッテリーも全てXT30プラグタイプのものです。
やはり手持ちのバッテリーを活かしたいのでこのようなXT30⇒JST-PH2.0変換プラグを作成しておくと手持ち2セルバッテリーが使えるようになるので大変便利です!
また、1セルバッテリー×2本を直列につないで2セルとして飛ばせる変換プラグもあると便利です。
普段1セル機を飛ばす事が多い方でも2セルとして飛ばせるようになり手持ち1セルバッテリーが活かせいいかと思います。

そして大きな容量の1セルバッテリーが手元に少なくても1セル×2本並列プラグを使えば便利です。
作成は非常に簡単なので、このような変換プラグを作っておけばTinyhawk Ⅱを快適に飛ばす事ができますね!
Betaflight設定 & バインド作業!
それではBetaflight設定をやっていきます。
ファームウェアは、BTFL 4.1.0がデフォルトとなっています。
ほぼ標準の状態で問題なく飛ばすことができました。
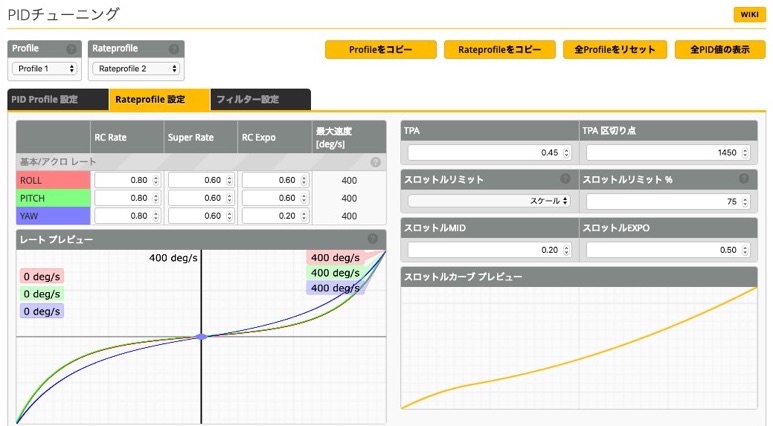
PIDやRates等の設定はあまりさわる必要はないかと思います。
初期状態の設定を保存!
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。

ポート設定!
[ポート]設定はデフォルト状態で特に問題なさそうですね。

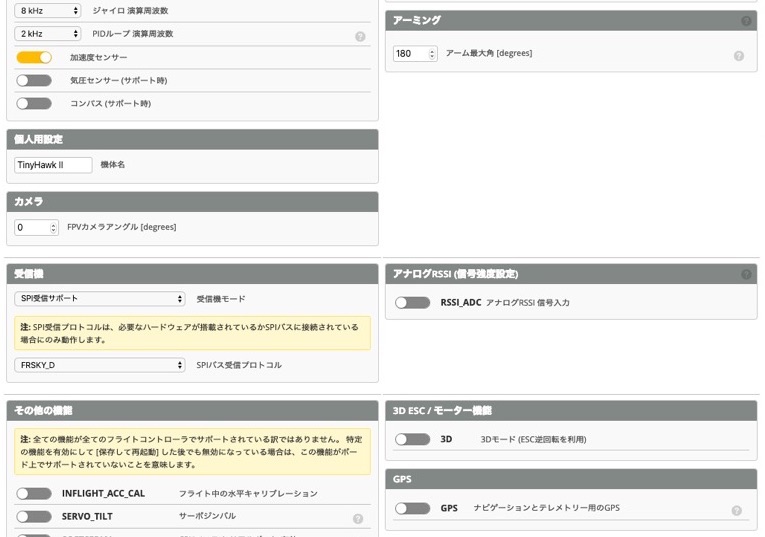
基本設定!
アーム最大角もデフォルトで180°設定されています。

受信機設定はデフォルトのFRSKY_D(D8モード)のままでいきます。
FRSKY_X(D16モード)に変更しても問題ないかと思います。
[エアーモードを常時使用」はデフォルトでONになっています。
私の場合、Angleモードで飛ばすことはなくAcroモードでいつもエアーモードはオンにしているのでこのままいきます。

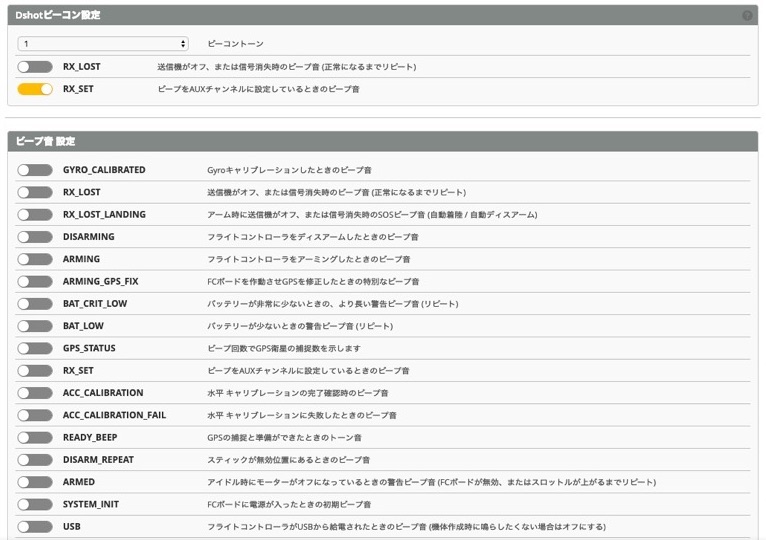
[Dshotビーコン設定]のRX_LOSTがOFFになっていたのでON設定に変更しました。
あとビープ音設定はデフォルトでは全てオフになっています。
問題ないと思うので全てオンにしました。
あとはデフォルトのままで問題なさそうですね。
電源・バッテリー!
HVタイプのバッテリー使用のことも考え最大電圧の項目を4.4Vから4.5Vまで上げました。
少し飛ばしてみて調整していますが、他は特に変更する必要はなさそうです。

PIDチューニング!
PID・Rate Profileは2パターン用意されています。

開封時にこのような警告書が入っていました。
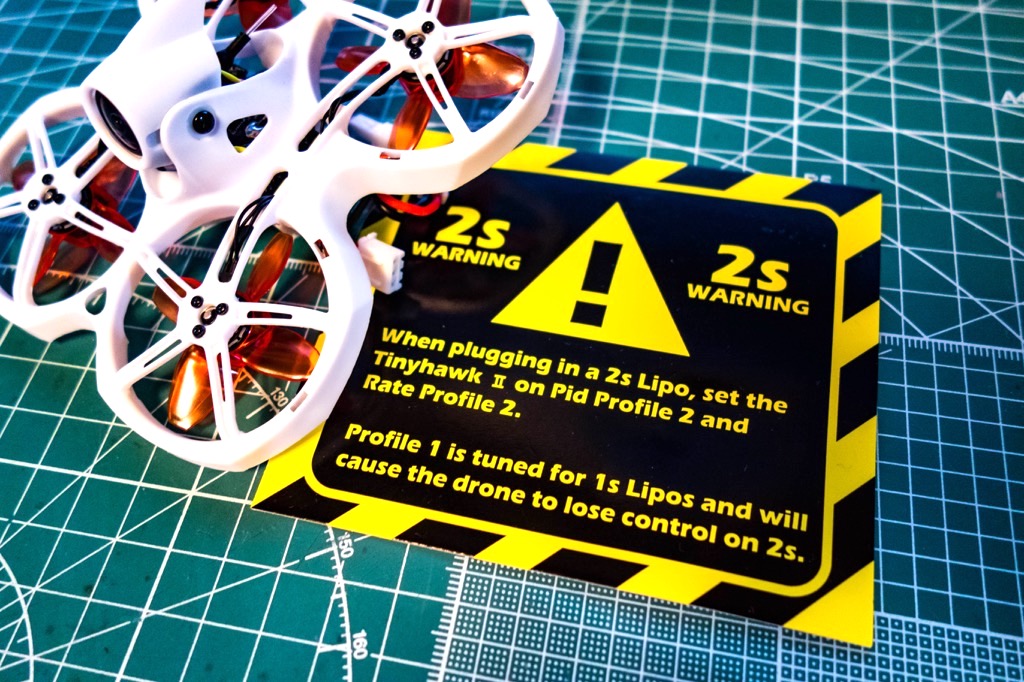
Profile1は1セル用の設定で、2セルバッテリー飛行時に使うとコントロールを失うよってな感じですね。
これはTinyhawkSと同様ですが、使用するバッテリー(1セル・2セル)により自動的に切り替わるようです。
機体とのバインド!
ここまできたら機体と送信機をバインドさせます。
バッテリー接続後、機体底面のBINDボタンを2秒押せばバインドモードに入ります。
バッテリホルダーと干渉して押しにくいですがピンセットなどで押せば問題ないです。
またCLIコマンドラインからBINDモードに入る方が簡単なのでそちらもご紹介しておきます。
付属マニュアルには[bind_rx_spi]入力でバインドモードに入るとありますが、[unknown command]エラーが出ます。
デフォルトでBetaflight 4.1.0が入っているので、バインドモードには[bind_rx]でいいようです。

あとは通常通り送信機側もバインドモードに入り機体とバインドして完了です。
受信機!
送信機とのバインドが完了したら次に[受信機]タブへと移ります。
チャンネルマップを[AETR1234]に変更。

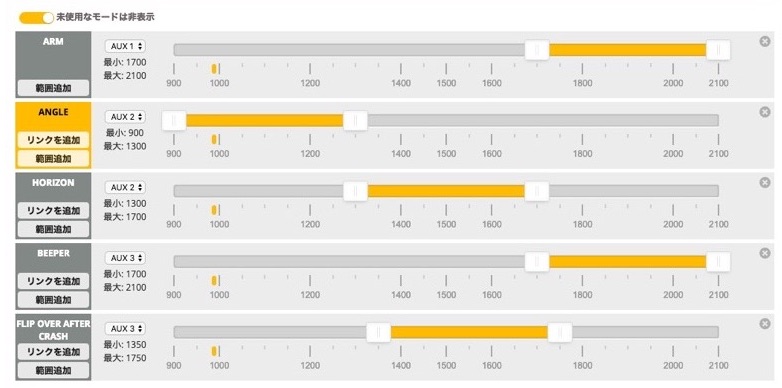
モード!
こちらがデフォルトで設定されている項目です。
スライダーの位置を調整しましたが、ブザー(BEEPER)とタートルモード(FLIP OVER AFTER CRASH)が設定されているので問題はなさそうですね。
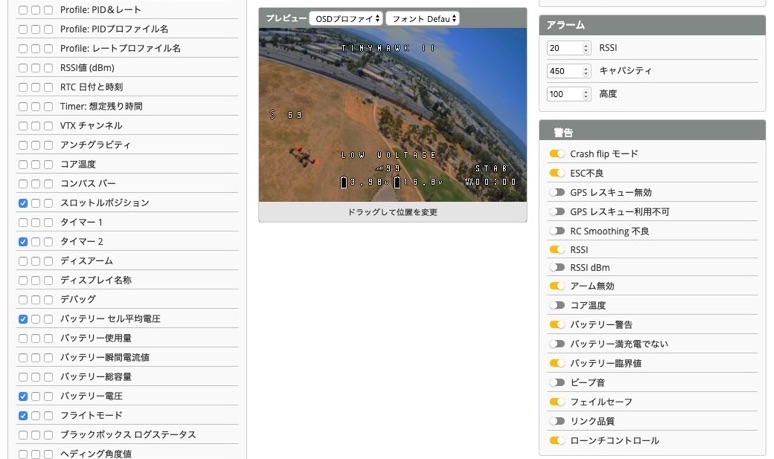
OSD
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。
VTXのBand & Channelの設定!
VTXのBandとChannelも設定しておきましょう。
マニュアルにも書いてあるのですが、搭載されているVTXは初期状態ではロック?(使用地域の違い?)がかけられているようです。
まずはこのロックを解除しないとVTXのBandやChannelの設定が出来ないようなので(使えない周波数がある)解除します。
作業は簡単で、VTX基盤上にあるスイッチを押した状態でバッテリーを接続すればLEDが点滅してロックが解除されます。(USB給電ではなくバッテリーを接続してください!)
ロックが解除されたら周波数の設定をしていきます。
青LED(Band)、緑LED(Channel)、赤LED(出力)の点灯回数により調整します。
5秒長押しで青LEDが点灯します。
あとはスイッチ短押しで、青LED(Band)→緑LED(Channel)→赤LED(出力)と切り替わるので目的の場所で2秒長押しで設定。(ボタン短押しで点灯回数が変わっていきます)
さらに2秒長押しで決定。
今回Betaflight4.1.0を私ははじめて使ったのですが、VTXテーブルというものが導入されたんですね!
VTXテーブルからSmart Audio経由で設定出来るので便利です!
これまでの40CHのバンド・チャンネルから日本でアマチュア無線で使える周波数(7波)を登録しておきファイルを出力しておけば今後便利に使えるのかな?

【追記】↓↓↓ 日本で使える周波数のみ登録してテーブル作れば便利だろうと考え、国内専用VTXテーブルを作ってみたのですが・・・どうやらこの方法だとSmart Audioがうまく動作してくれないようです!

単純にバンドとチャンネル、送信出力を決めればSmart Audio経由で設定されるんですね!
これ便利だわ!
上記方法では上手くいきませんでしたが、国内で使用できる周波数のみ残しテーブル作成。(別にやる必要ないですが)

この設定は、[ファイルへ保存]や[ファイルからロード]が可能で他の機体(同じVTX)でも使え回せるということですね!
設定データの保存!
ここまでできればBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を【CLIコマンドライン】から[diff all]で差分バックアップを取って完了となります!
まとめ!
こんな感じでEmax Tinyhawk Ⅱを飛ばせる状態に設定できました。
あとはご自分の好みやスキル等に応じて設定を調整していけばいいと思います。
75mmサイズのWhoopなのでちょっとしたスペースでは1セルで飛ばし、また野外の広い場所では2セルでかっ飛ばす(かなり速いです!)、機体が丈夫なので練習機としてガンガンぶつけられる、なかなか面白い機体ですね!

カメラやVTXがアップグレードされ、さらにカメラ角度の調整もできるようになりこれまでのTinyhawk集大成ともいえる機体に仕上がっているのではないでしょうか。
それだけにモーターがFC直付けで接続されカスタマイズしにくいのが少し残念なところです!

 Tinyhawk ⅡフレームキットがBanggoodに登場!待っていた方きっと多いはず!
Tinyhawk ⅡフレームキットがBanggoodに登場!待っていた方きっと多いはず!  やっぱり楽しいTinyhawk。そしてTinyhawk Ⅱフレームキットがようやく登場!TinyhawkSの載せ替えを考えています。
やっぱり楽しいTinyhawk。そしてTinyhawk Ⅱフレームキットがようやく登場!TinyhawkSの載せ替えを考えています。  【TinyWhoop】ゴーグルや送信機がセットになったRTFモデルのオススメは?
【TinyWhoop】ゴーグルや送信機がセットになったRTFモデルのオススメは?  ゴーグル・送信機がセットになった『Emax Tinyhawk Ⅱ』RTF版の販売が開始されました!
ゴーグル・送信機がセットになった『Emax Tinyhawk Ⅱ』RTF版の販売が開始されました!  Emax Tinyhawk Ⅱにブザーを取り付ける!作業スペースの確保が難しく難易度は高いです!
Emax Tinyhawk Ⅱにブザーを取り付ける!作業スペースの確保が難しく難易度は高いです!  【Emax Tinyhawk Ⅱ】カメラ&VTXがアップグレード!カメラ角度の調整も可能とこれまでのTinyhawkの弱点が改善されています!
【Emax Tinyhawk Ⅱ】カメラ&VTXがアップグレード!カメラ角度の調整も可能とこれまでのTinyhawkの弱点が改善されています!  【Emax Tinyhawk Ⅱ】ようやく登場!RunCam Nano2カメラ搭載でカメラ角度の調整ができるTinyhawk Ⅱ。VTXもアップグレードされTinyhawkの完成形ですかね!
【Emax Tinyhawk Ⅱ】ようやく登場!RunCam Nano2カメラ搭載でカメラ角度の調整ができるTinyhawk Ⅱ。VTXもアップグレードされTinyhawkの完成形ですかね! 

井上様
市原です。
ありとうございました。
さっそく試してみます。
よし様
Tinyhawk2は非常によく飛んでくれる機体なので、早く飛ばせるようになればと思いますが・・・
お使いのOSはWindowsですかね。
Windowsの場合、必要なドライバー?がないとシリアルポート(COMポート)として認識されないためFCの接続が出来ないことがあるようです。
私の場合、MacとWindows両方使っていますが接続できないトラブルがこれまでなかったのであまり詳しくないのですが、Betaflightに接続できないトラブルではよく下記の話を聞きます。
Betaflightを起動すると、「最新のCP210xドライバのダウンロード先はこちら」「最新のSTM USB VCPドライバのダウンロード先はこちら」という項目があるかと思いますがこのあたりのドライバインストールやその下にある「Zadig」を使って問題を解決したという話もよく聞きます。
このトラブルに遭遇したことがなく試したことがないため解説できませんが、上記ドライバのインストールやポート関連のトラブルはよく聞くのでそのあたりで検索していただくのもいいかと思います。
お役に立てず、すいません!
井上様
はじめまして、よしといいます。こちらのブログを読ませていただき初のWOOP Tinyhawk2を購入しました。しかし、BATAflightにてシリアルポートで接続できませんと表示されます。状況を説明します。
1.ケーブルはデーター用
2.機体は青と赤のLEDの点滅
3.機体のボタンを押しながらUSBを差したらLEDが点灯せず
4.機体に電池をつないでからUSBを差すも変化せず
なんかポートの設定が悪いような気がしますがわかりません。
お忙しいと思いますが、たすけていただけませんでしょうか。
お願いいます。
東京バード様
ありがとうございます。実はもう一機Tinyhawk2があり、これはバインド・設定中にFCが逝ってしまいました(笑。で、先ほどこの機体のカメラと入れ替えてみましたが、状態は変わりませんでした。試しにこの機体で見ると、ちゃんと映像が映ります。この機体はバッテリーを接続してもFCのLEDが点灯せずなので、次の方策としてこの機体のVTXを移植してみようと思います。たいへんな作業かどうかわかりませんが・・。FCの移植はモーターやLEDをはんだ付けしているようなので、とりあえず回避です。
色々とお騒がせしましたが、何か変化がありましたらご報告します。ありがとうございました。
東京バード様、ご対応いただきありがとうございます。
VTXのバンドや出力切り替えの方法やダイヤフラムはおかげさまでよくわかりました。
しかし相変わらず映像出力はされませんね。いくつか周波数を切り替えてみたのですが・・。
ゴーグルの映像では、特定の周波数でホワイトノイズが消え、受信バーもフルに立ちますが、画面は暗いまま・・。ということで、どうやらカメラの不良のようです。貴サイトを参考にしつつ、カメラ交換をやってみたいと思います。
今後ともよろしくお願いします。
井上様
カメラ不良ですか!
残念です。
カメラ交換の際、新しい?(単体購入した)Nano2やEOS2カメラの場合、プラグ(Cam・5V・GND)の配置が他のTinyhawk機体では違っていたので確認&気を付けて下さいね!
今後ともよろしくお願いします
井上様、こんにちは!
私も今回はじめてBetaflight4.1.0を使ったのですが、これに対応するBetaflight Configuratorは10.6以降となります。
以前のバージョンをお使いであれば、現在最新となる10.6.0をインストールして立ち上げるとVTXテーブル等表示されるかと思います。
ゴーグル側でオートサーチをかけても映像が来ていないという事でしょうか?
一応、現在設定されている周波数(バンドとチャンネル)の確認方法は、バッテリー接続時にVTXのLED(青・緑・赤)が光りますが、その点滅した回数で現在設定している周波数を知ることができます。
(青LEDはバンド、緑LEDはチャンネル、赤LEDは出力を表しています)
例えば、青LEDが3回点滅、緑LEDが1回点滅、赤LEDが1回点滅した場合・・・
バンドE・チャンネル1となり5705MHz(出力25mW)となります。(付属マニュアルで周波数表見て下さい)
また周波数の設定方法ですが、VTXテーブルを作り直すとどうやら上手くSmart Audio機能が動作してくれず・・・少し記事追加しました。
デフォルトのVTXテーブルからバンドとチャンネルを選択するだけで周波数の設定はでき、VTXのスイッチからよりも簡単かと思います。
こんにちは。いつも大変楽しく拝読しております。
私も今般Tinyhawk2を購入し、飛ばしていますが、FPVゴーグル(EachineD800という安いやつです)で
映像を見ることができません。
具体的には、ノイズばかりの画面と、真っ黒の画面があり、周波数によって変わるような感じです。
多分ロック解除はできていると思いますが、周波数とかバンドの設定がよくわかりません。今までは特に何もせずともFPVできたので、ちょっと驚いています。
貴殿のおっしゃるBetaflight4.1.0ですが、VTXテーブルも表示されません。
これだけでは情報不足かもしれませんが、何とかアドバイスいただければと思います。
よろしくお願いします。