
前回『【Toothpick】4セル対応Toothpick『SKYSTARS TALON X110』。標準でFrsky xm+レシーバー&100mW VTX搭載で野外でかっ飛ばすには良さそうな構成ですね!』の続きとなります。
Toothpickは、Happymodel Sailfly-XやEachine RedDevilを飛ばすようになりなりましたが、自身3機目となるこの『SKYSTARS TALON X110』は4セルまで対応しています。



4セルバッテリーなんてまだ手元になく、Toothpick機の練習は普段の練習場所が狭いこともあり(腕もないのですが!)2セルバッテリーでの飛行がメインとなっています。
最近ようやく3セルバッテリーでの飛行も慣れてきたことから3セルメインに移行しようかと思っていましたが、この4セル対応機なんて・・・

数回テスト飛行をしてみましたが、やはり3セルでの飛行は非常にパワフルでまだまだ手に余るので当面はこのSKYSTARS TALON X110くんも2〜3セルバッテリーでの運用がメインとなりそうです。
XT30プラグを2本直列に繋いだ4セル用の変換ケーブル(2セルバッテリー×2本)を作成しましたが、まだ4セル機として飛ばすのは先になりそうです!(恐怖心がまだ抜けない!)
今回は、SKYSTARS TALON X110にロスト防止用ブザーを設置しこの機体を飛ばせるようにするためバインドから最低限のBetaflight設定をやっていきます。
目次
【SKYSTARS TALON X110】バインドから飛ばすまでの最低限のBetaflight設定!
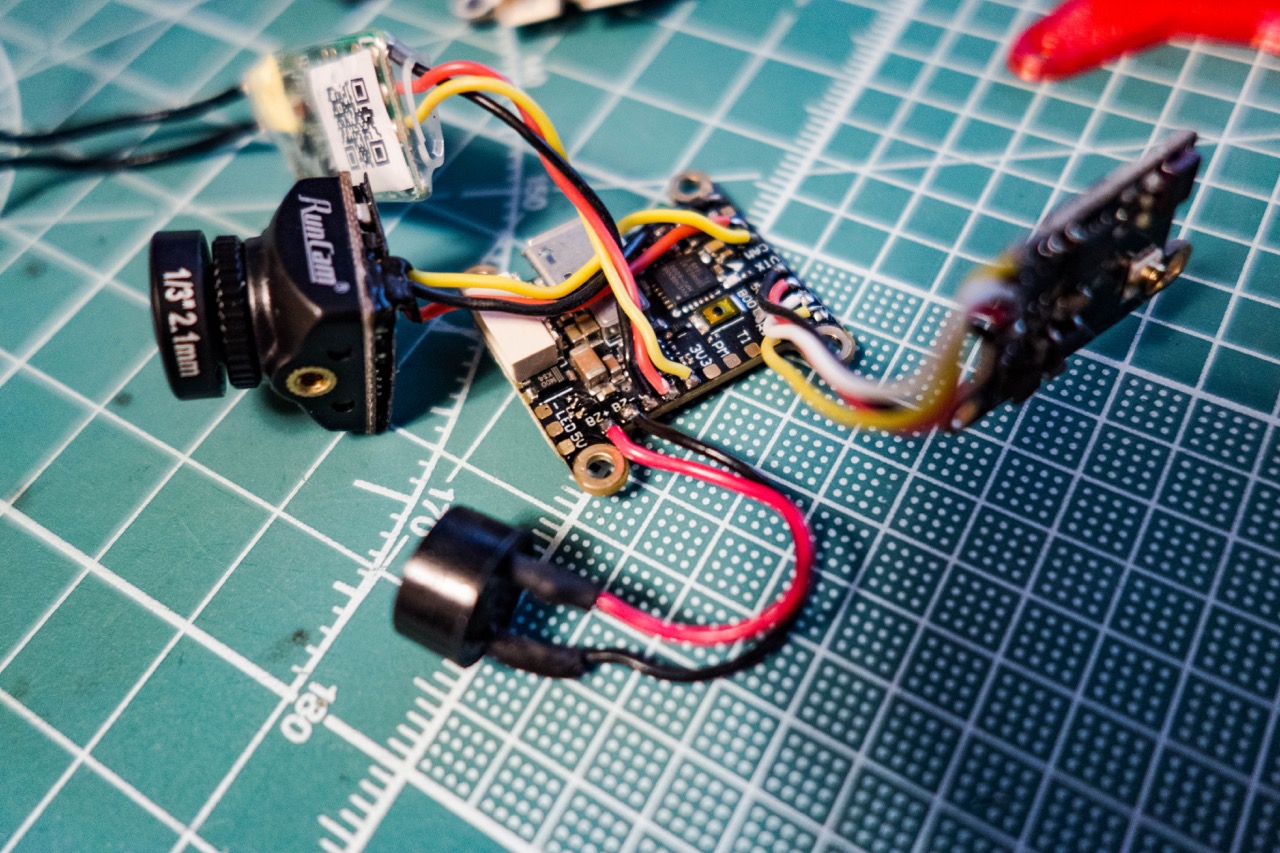
まずはロスト防止用のブザーの設置をやってみます。
こちらは前回、機体をバラし内部構成をチェックした時に一緒にやってしまいました。
FCのブザーポート(BZ+ BZ−)に接続するだけなので簡単です!
Betaflight設定 & バインド!
次にBetaflightの設定に移ります。
飛ばせる状態にする最低限の設定に限定してご紹介します。
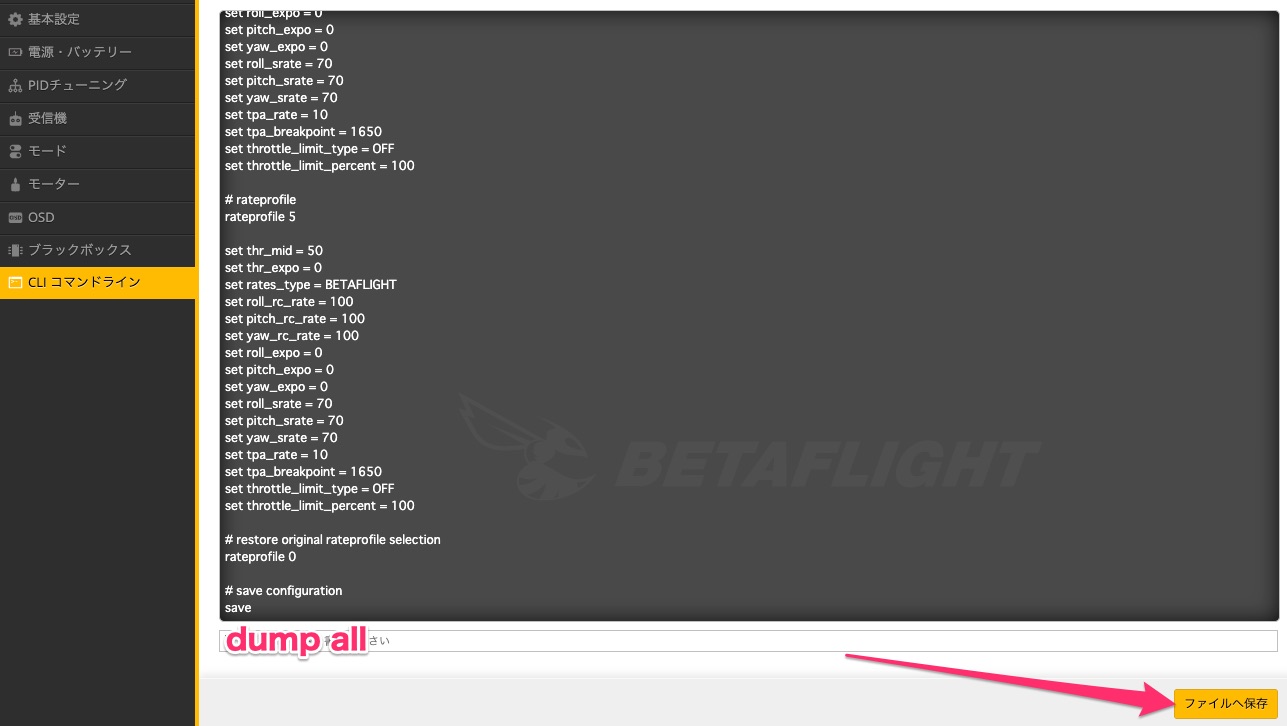
初期状態の設定値を保存!
まずは初期状態の設定を保存しておきます。
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。
ポート設定!
ポート設定はデフォルトの状態で特に問題なさそうですね!

基本設定!
デフォルトで[モーター回転方向を逆転]に設定されているようですね。
また、MOTOR_STOP(アーム後にモーターを回転させない)をオフに変更。
モーターアイドルスロットル値を初期状態の4.0から6.0に変更しました。
このあたりまで上げると(もう少し高くてもいいのですが!)、スロットルを抜いた時の浮遊感を楽しめます!
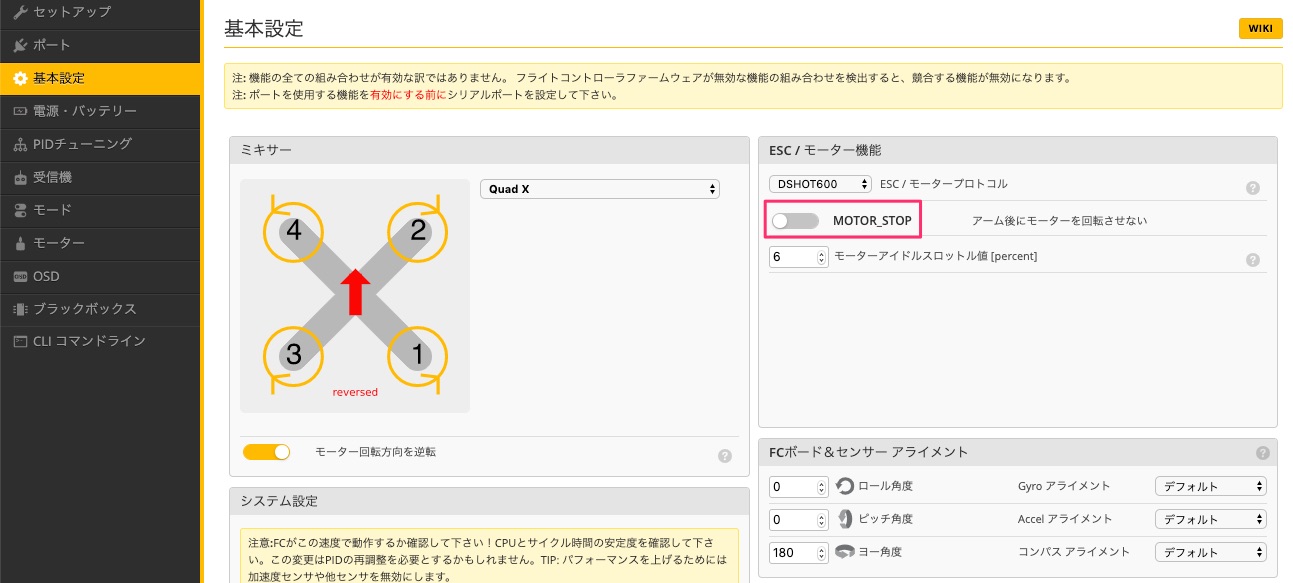
アーム最大角をデフォルトの25°から180°に変更。

機体名を入力し、カメラアングルを30°に設定。
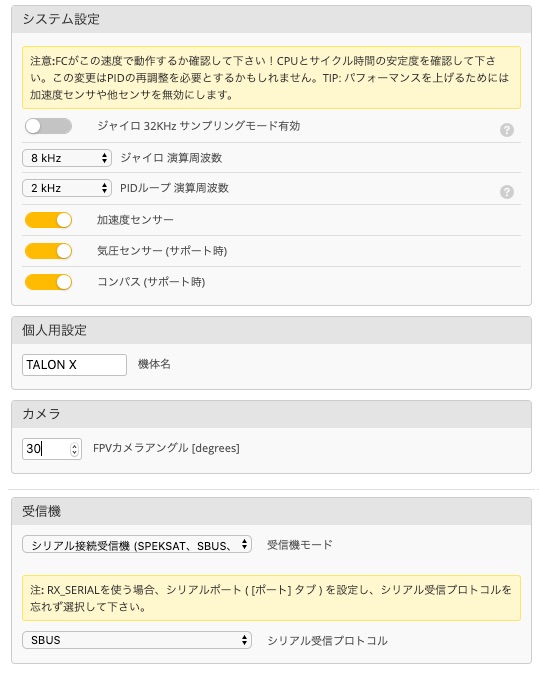
エアーモードをオンに設定しました。(こちらはお好みで!)

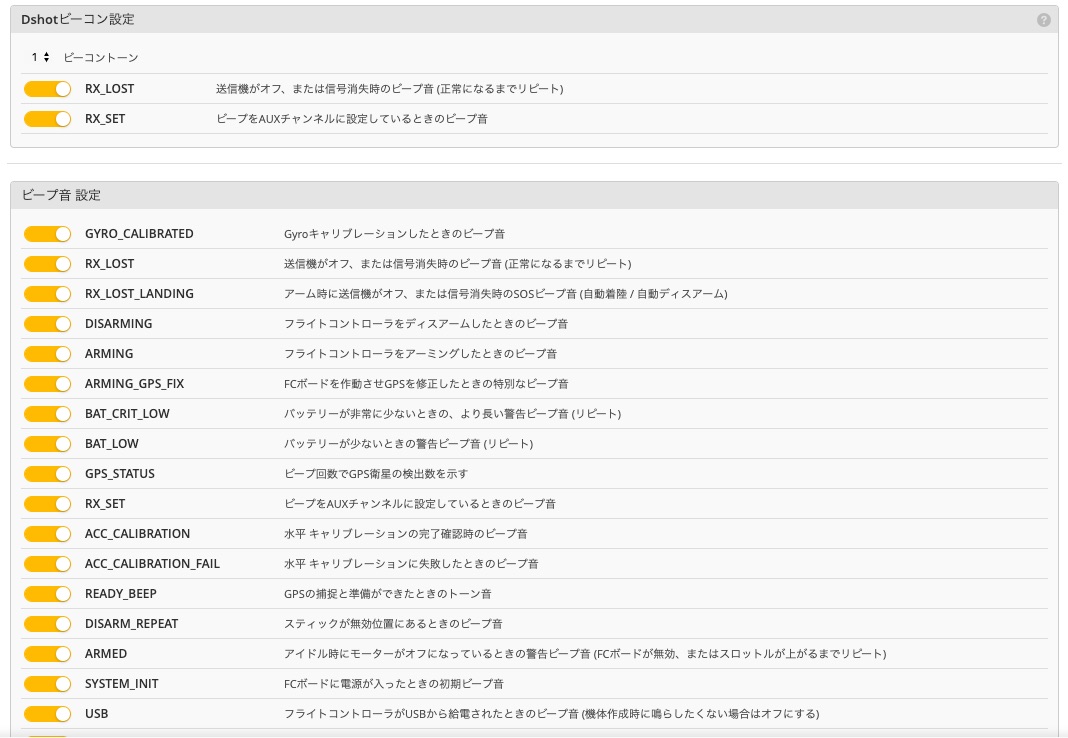
BEEP設定はデフォルトで全てオン設定になっていますが特に問題ないですね。
ビーコントーンをオン設定に変更しました。
電源・バッテリー設定!
バッテリー容量を300mAhに設定しました。
HVバッテリー使用がメインとなりそうなので最大電圧を4.5に上げました。
また初期状態では少し高く設定されているようで、最小電圧や警告電圧を少し下げてみました。
あとは飛ばしながら微調整していきたいと思います。

PIDチューニング!
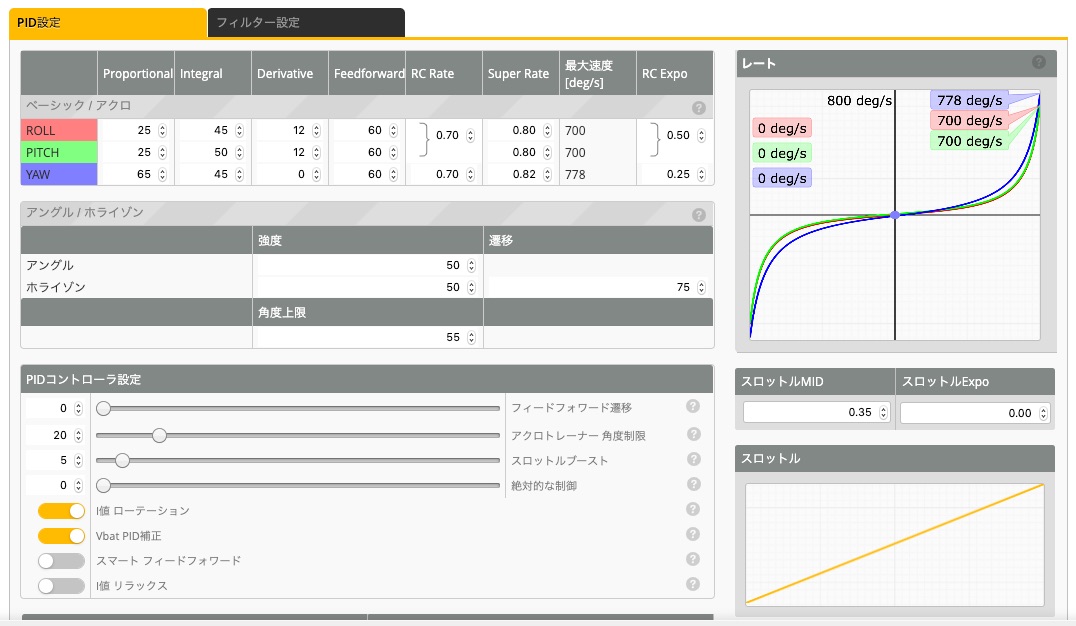
デフォルトで設定されているPID設定は以下の1つのみです。
設定は普段飛ばされている機体を参考にお好みで設定してみて下さい。

Toothpickはスロットルを入れたらすっ飛んでいくあの感覚に私はまだあまり慣れていないため、初飛行の際は普段より少しレーツを下げてテスト飛行しています!
ご参考までに。
かなりレーツを下げて望んだ初飛行の際の設定です!(数パターン作っていきましたが)
数回飛ばせば慣れてくるので徐々に自分が飛ばしやすい値(普段飛ばしている値)に近づけていけばいいかと思います。
機体とのバインド!
ここまで設定ができたら機体と送信機のバインド作業に移ります。
USB接続のみでバインド作業はできます。(バッテリー接続の必要はありません)
【Frsky xm+レシーバーの場合】
Frsky xm+レシーバー搭載機として説明を続けます。
レシーバーのバインドボタンを押した状態でUSB接続すれば受信機がバインドモード(赤と緑のLEDが点滅から点灯に変わる)に入るので、送信機とバインドします。
受信機設定!
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
チャンネルマップを確認。(AETR1234)
RSSIチャンネルをAUX12に設定して完了!

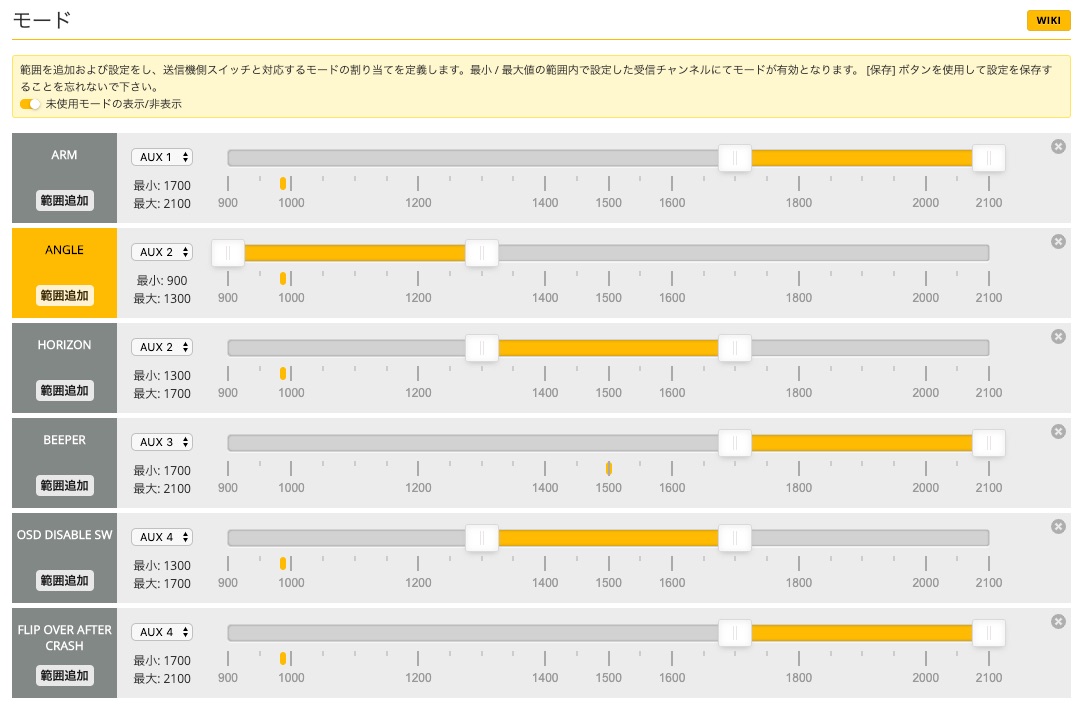
モード設定!
初期状態ではARMのみ設定されています。
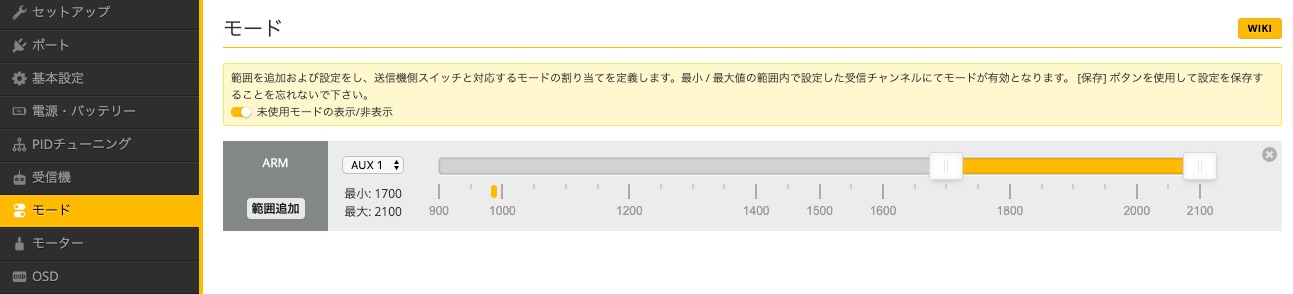
最低限の設定(フライトモード・ブザー等)を追加しておきます。
OSD設定!
こちらはお好みで設定して下さい!

NTSCに変更するとOSDが表示されないようなので注意して下さい!
デフォルトのAUTO設定で問題ないかと思います!
ここで搭載されているRunCam Nano2カメラなんですが、私の機体カメラが調子悪いのか?ゴーグルから見た映像がほぼ白黒状態になっています。
DVRで録画された映像は特に問題なく映っているのですが、なぜなんだろう?
RunCam Nano2カメラを使うのは初めてですが、こんな仕様?どこか設定の不備?
この点少し気になるので配線や設定等、再確認しています。
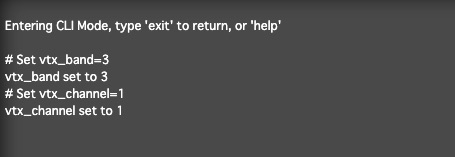
VTXのBand & Channelの設定!
VTXの送信周波数を設定します。
【CLIコマンドライン】から設定していきます。
Set vtx_channel=1
Set vtx_freq=5705
save
設定データの保存!
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
まとめ!
テストで数回、目視&FPVで飛ばしてみましたが正直なところ他の3セル対応Toothpick(Sailfly-XやRedDevil)との飛びの違いが大きく感じられず!

というのも飛ばしている場所が狭いのと、まだまだパワーが有り余り私の腕では大きな違いを感じるところまで持っていけていないというのが正直な感想です。
まぁこのあたりもう少し飛ばしてToothpick機の飛びに慣れてくれば違いも分かってくるのかな?なんて!
また4セルなんていうまだ未体験の世界も早くのぞいて見たいのですが・・・!
このあたり、また次回飛行動画等でご紹介出来たらと思っています。

あと標準で搭載されているRunCam Nano2カメラを今回はじめて使ってみたのですが、普段使い慣れているCaddx Turbo EOS2カメラの1200TVLに比べ700TVLと低いのに画像が綺麗なのに驚きました!
構成的には、フルレンジレシーバー(Frsky xm+)や100mW出力VTX搭載でこのRunCam Nano2カメラと野外でかっ飛ばすには十分な構成で完成度は高いと思います。
もう少し飛ばしてみて、Caddx Turbo EOS2カメラへの変更やVTXも200mW出力可能なVTXへの変更なんて考えています!(まぁ必要ないかな?)
Sailfly-XやRedDevilも最終的にこれに近い構成にカスタマイズしているので、4セルまで対応した機体(上記2機は3セルまで対応)と考えるとトータルコスト的にはよく出来た機体構成になっているかと思います。



 【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!
【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!  【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ!
【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ!  【Happymodel Larva X HD】標準の2.5インチから3インチToothpickに変更やWhoop形状でも楽しめるHD機です!
【Happymodel Larva X HD】標準の2.5インチから3インチToothpickに変更やWhoop形状でも楽しめるHD機です!  FCシャットダウン!?これってBT2.0の特性なのかな?【BETAFPV HX100 SE】
FCシャットダウン!?これってBT2.0の特性なのかな?【BETAFPV HX100 SE】  【EMAX Tinyhawk Freestyle 115mm】とにかく飛びが軽くて飛ばしやすいToothpickです!
【EMAX Tinyhawk Freestyle 115mm】とにかく飛びが軽くて飛ばしやすいToothpickです!  【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!
【Emax Tinyhawk Freestyle】Caddx Turbo EOS2カメラやRunCam Nano2カメラがマウント出来る便利なカメラマウントを試してみる!  【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】  1セルToothpickが楽しい!80mmサイズの可愛い1セルToothpickを作ってみた!
1セルToothpickが楽しい!80mmサイズの可愛い1セルToothpickを作ってみた! 

コメントを残す