
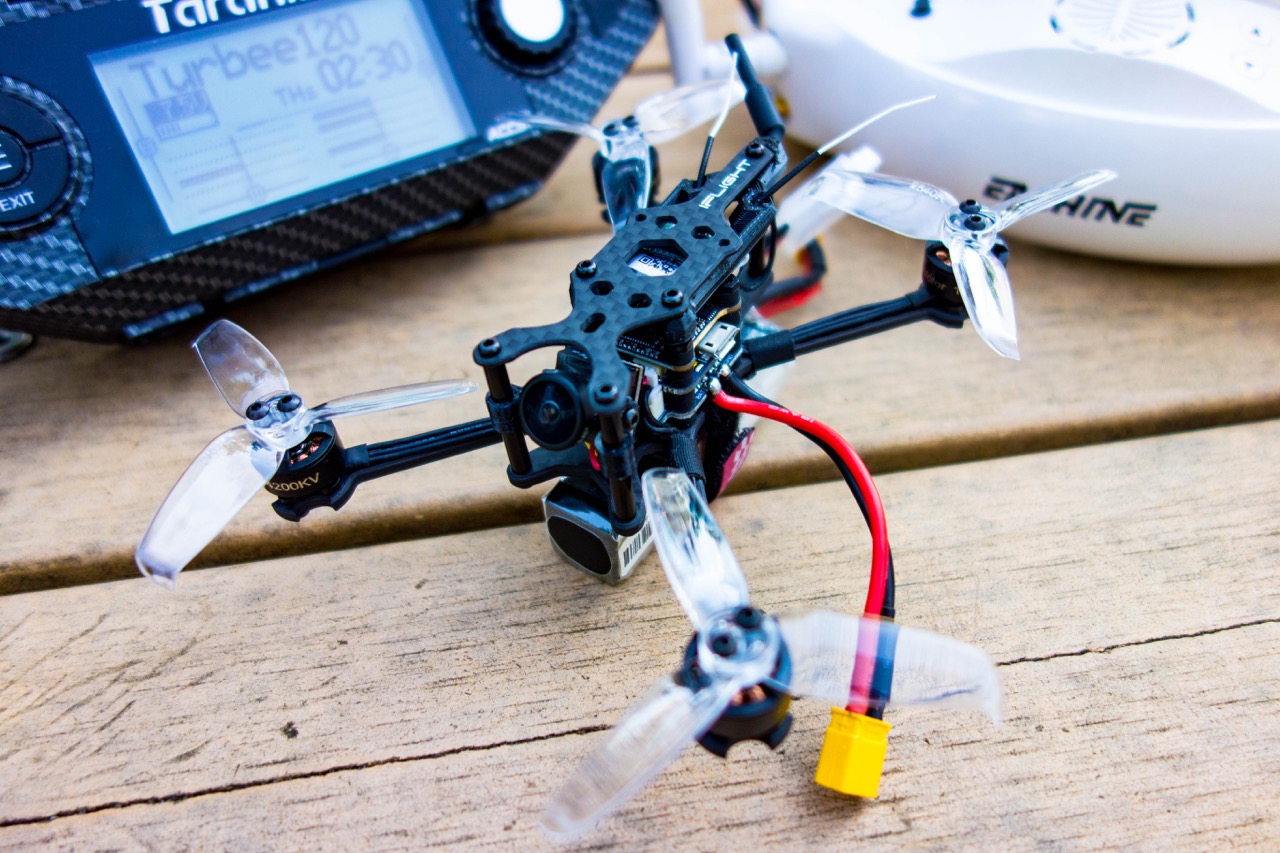
前回、『【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!』の続きとなります。
Toothpickに興味を持ってはじめてのToothpick機『Happymodel Sailfly-X』と『Eachine RedDevil』がやって来たのが1ヶ月ほど前の話。


そして『SKYSTARS TALON X110』や『iFlight TurboBee 120RS 4S』という4セル対応機までやって来ました!


もう機体スペックに私の腕が追いついていない状態が続いております!
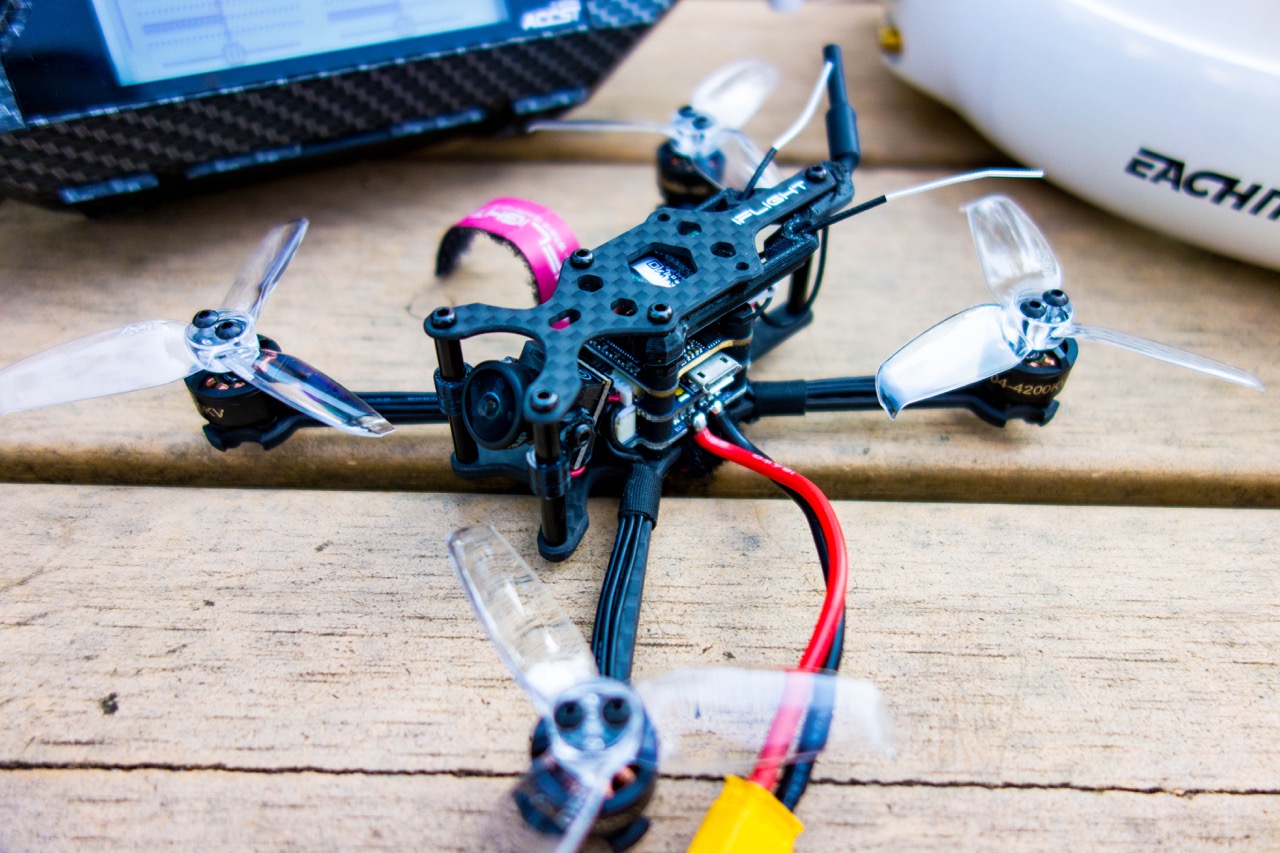
今回は『iFlight TurboBee 120RS 4S』のブザーの設置や飛ばすまでのバインドから最低限のBetaflight設定をやってみました。
フルレンジレシーバー(Frsky xm+)に200mW出力VTX、Caddx Turbo EOS2カメラが標準で搭載と他の機体と比べて構成的に高スペックな機体となっています。
これだけの機体ですから野外でぶっ飛ばすにはブザーの設置は必須となると思いますが、少しBetaflight側で設定してあげないとブザーが鳴らないようです。(後で詳しく説明します)
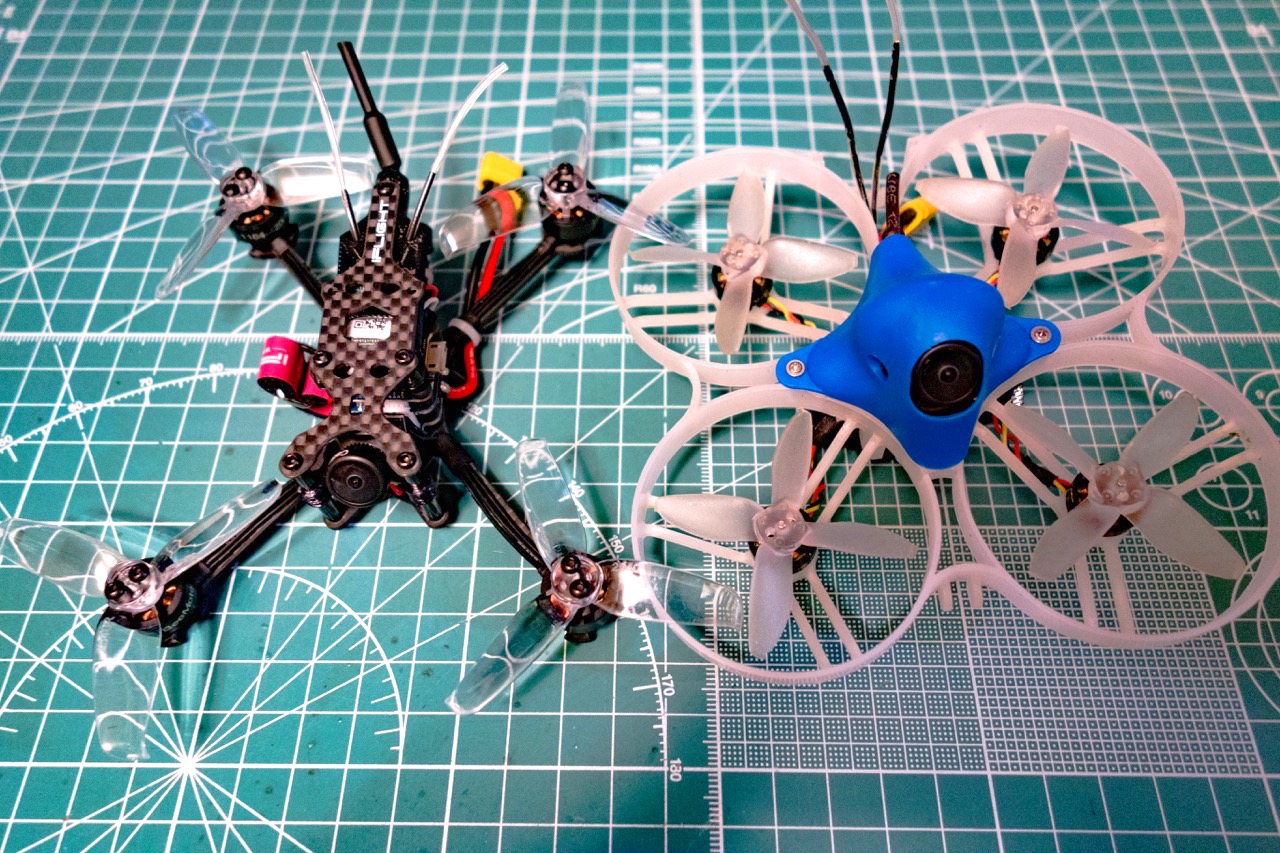
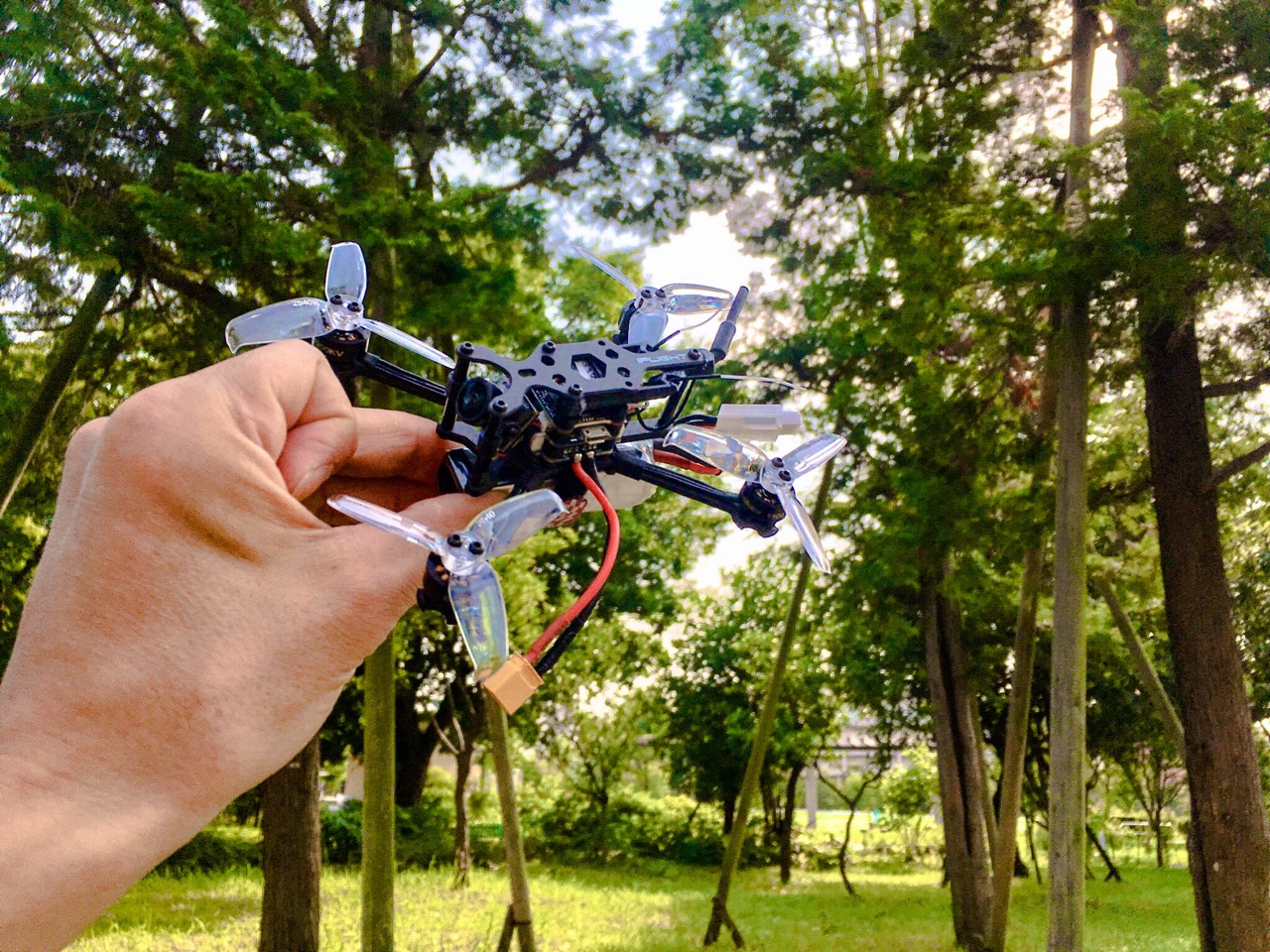
まだ3セルまでの飛行にとどめていますが、Toothpick特有のスロットル操作にダイレクトに機体が反応してすっ飛んでいくあの感覚・・・、広い場所さえあれば大変気持ちよく飛ばせる印象です!
しかし機体重量に対して揚力?(推力?)が大きくスロットル操作に対する機体操作が追いつかなく、同サイズWhoop機(85mmサイズ)より少しレーツを下げながら、慣らし&調整をしております。
もう少しでお盆休み、まとまった休みがとれたら2セル×2本の変換ケーブルを作ったので初4セル飛行なんかも試してみようと思っています。
当ブログは今の私のスキルで気になった(飛ばしたい)機体をメインでご紹介してるのですが、当サイト経由で機体を買われた方から「バインドできない?」や「Betaflight初期設定を教えてほしい」といったお問い合わせを最近よく頂くようになったので、この辺り最低限の設定等をご紹介させてもらうようになりました。
今回は『iFlight TurboBee 120RS 4S』、この機体を飛ばせる状態にするまでの最低限のBetaflight設定を紹介しようと思いますが・・・この機体を持っている(購入しようと考えている)方だと基本的すぎてもう必要ないかなとも思うのですが・・・
まぁ、やっていきましょう!
目次
【iFlight TurboBee 120RS 4S】バインドから飛ばすまでのBetaflight初期設定!
ブザーの設置!
まずはロスト防止用にブザーの取り付けをやってみました。
これは前回、機体を解体し内部構成をチェックした際にやってしまったのですが、ブザー設置後に肝心のブザーが鳴ってくれない・・・これでかなり時間を費やしてしまいました。
こちらに関しては後述しますが、Betaflightでの設定が必要となってきます。
ブザー設置には一度機体からFCタワーを取り出す必要があります。
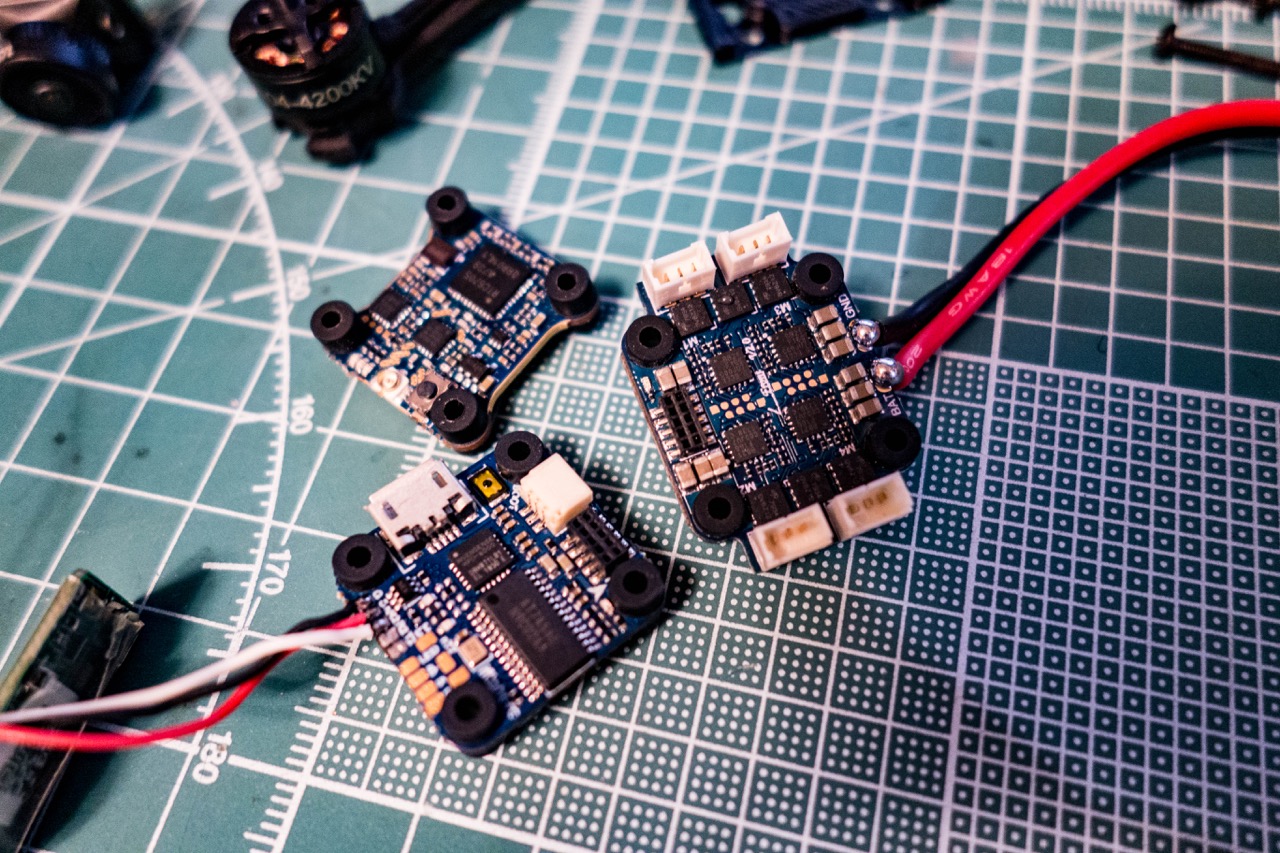
FC上のブザーポートに取り付けて完了です。
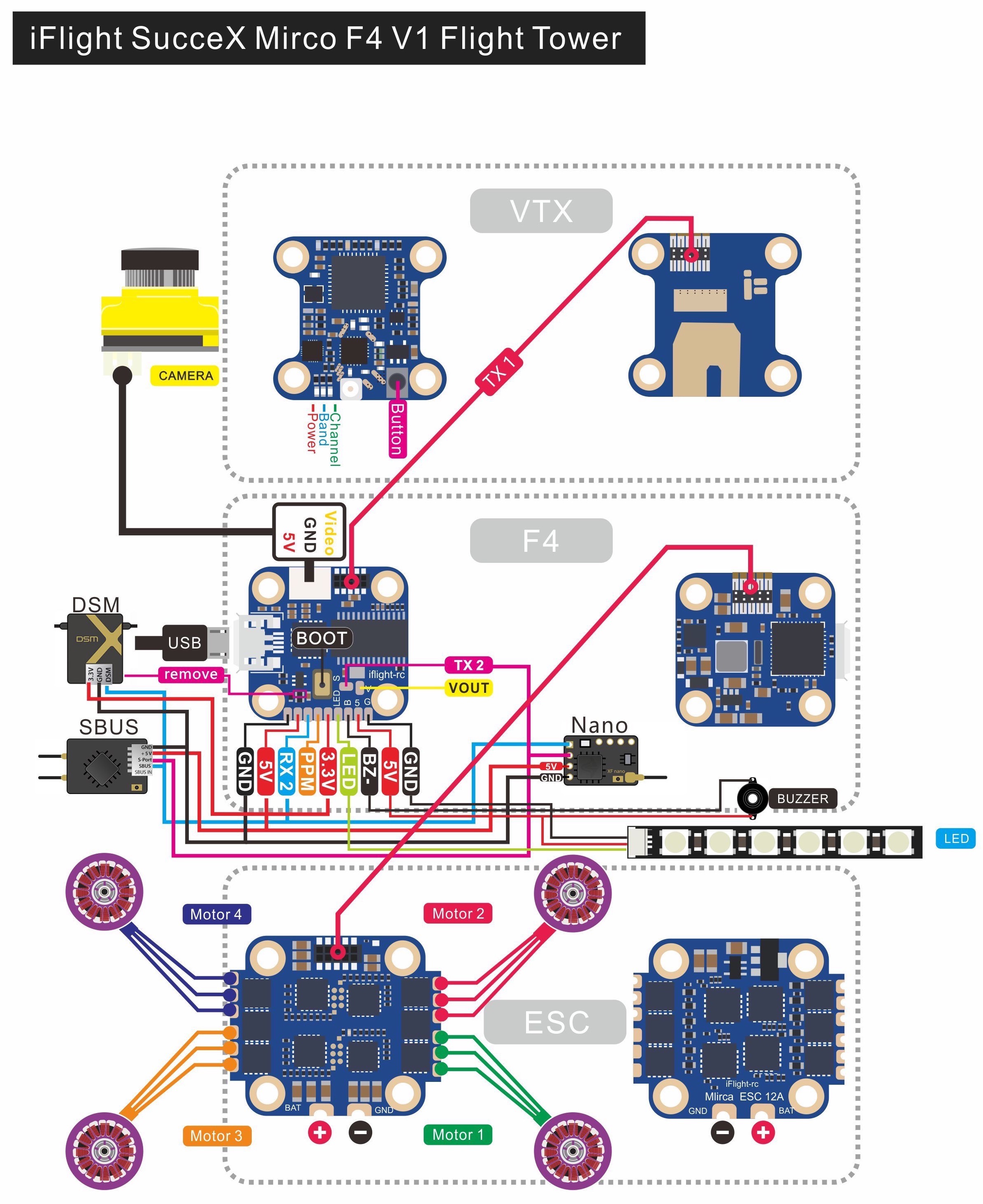
FC上の文字が小さく分かりづらいので以下の配線図も参考にしてみて下さい!
私はここで3時間ほど時間を費やしましたが、後述する【CLIコマンドライン】からの設定が必要となってきます。
ブザーの設置が完了したらBetaflight設定に移ります。
Betaflight 設定 & バインド!
次にBetaflightの設定に移ります。
飛ばせる状態にするまでの最低限の設定に限定してご紹介します。
デフォルトの設定値を保存!
まずは初期状態の設定を保存しておきます。
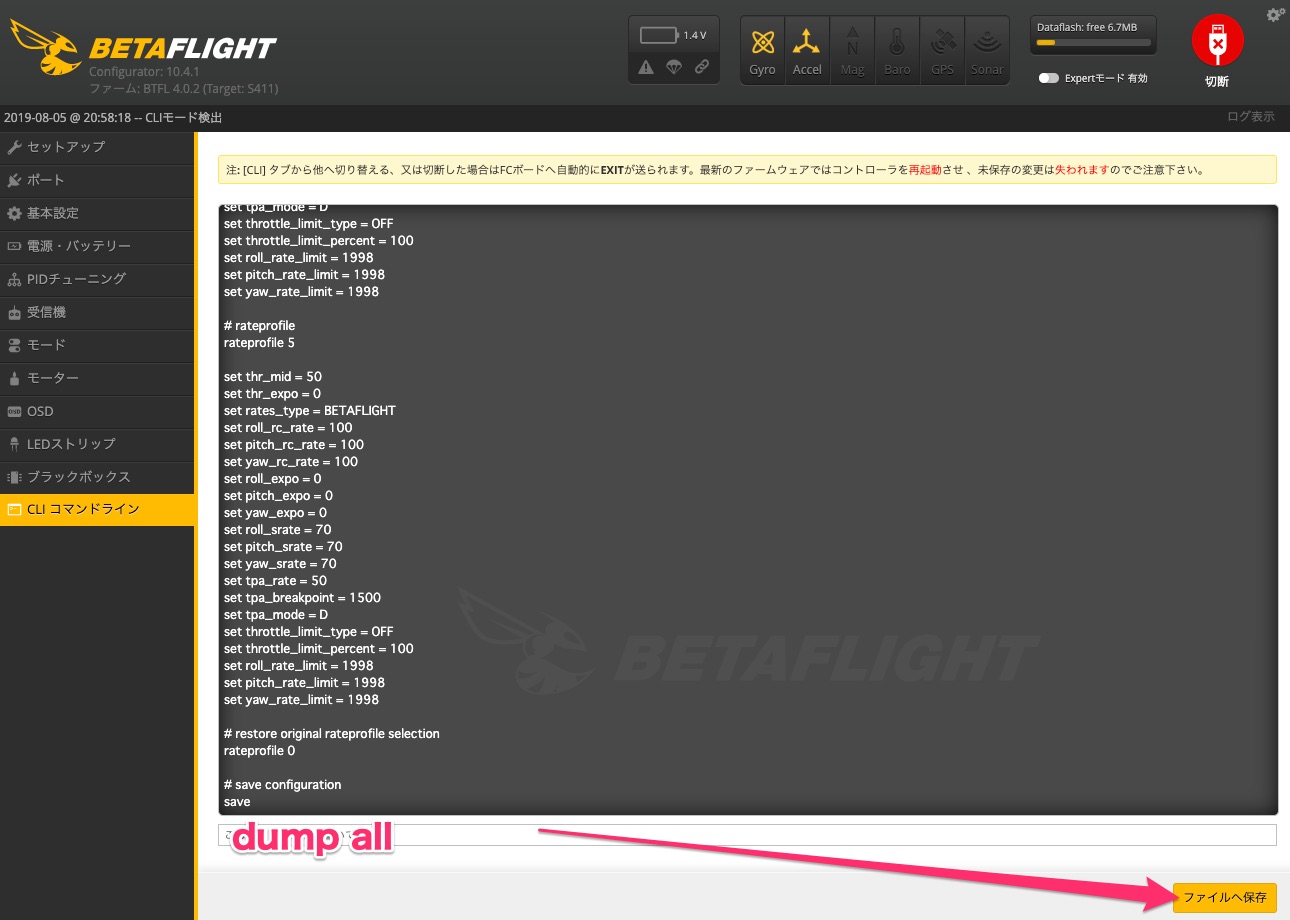
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。
ポート設定!
ポート設定はデフォルトの状態で特に問題なさそうですね!

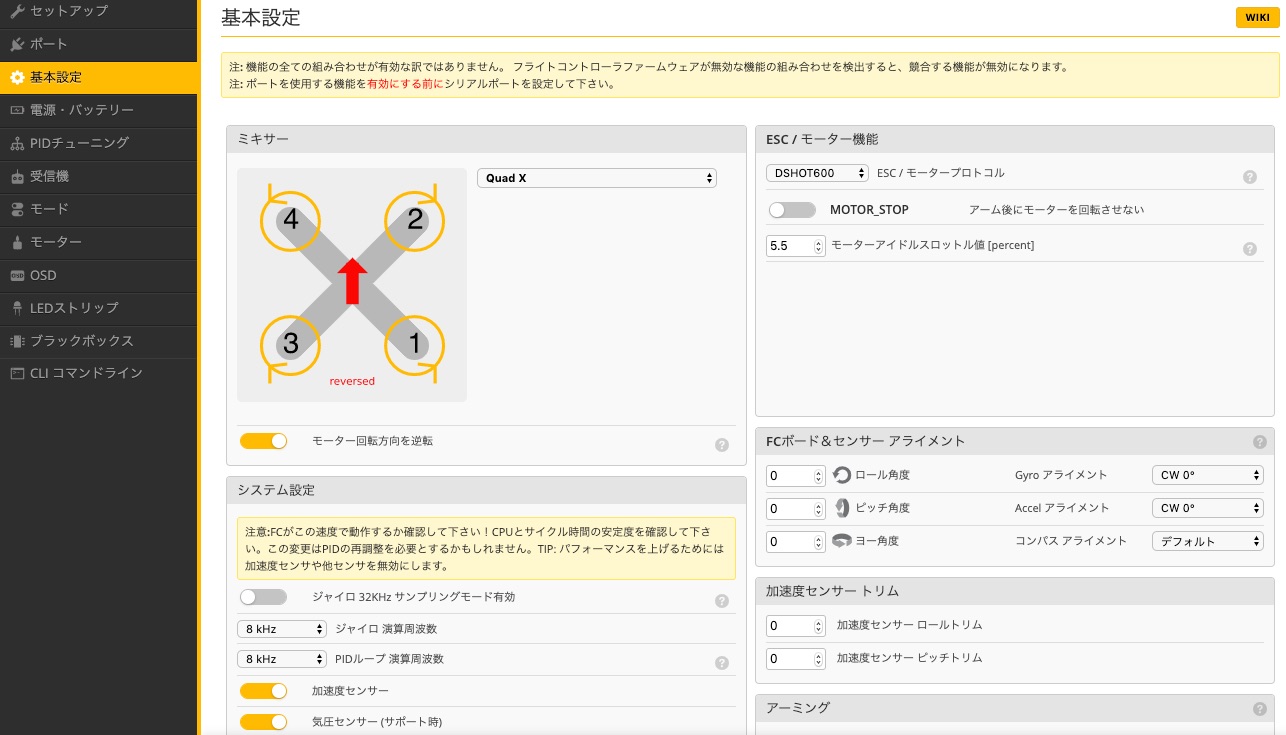
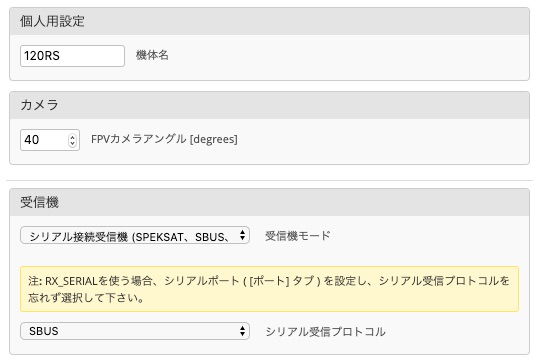
基本設定!
デフォルトで[モーター回転方向を逆転]に設定されています。
モーターアイドルスロットル値は初期状態で5.5に設定されています。
他の機体では初期状態は4.0ぐらいなので高めに設定されているようです。
私は他の機体では普段6.5ぐらいまで上げているのですが、とりあえずデフォルトの5.5のままにしておきました。
機体名を入力し、カメラアングルを40°に設定。
アーミング角度をデフォルトの25°から180°に変更しました。

[エアーモード常時使用]をオンに設定しました。(こちらはお好みで!)

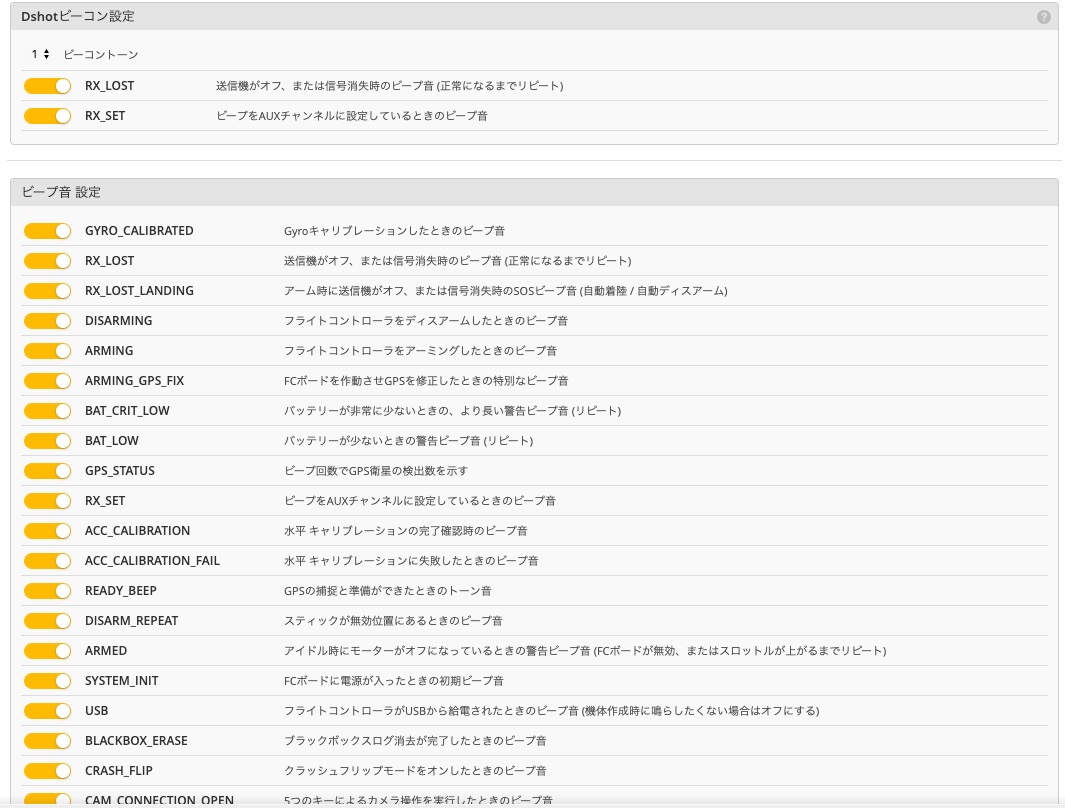
[ビープ音設定]はデフォルトで全てオン設定になっていますが特に問題ないですね。
[ビーコントーン]をオン設定に変更しました。
電源・バッテリー設定!
特に初期状態の設定で問題ないようですが、HVバッテリー使用がメインとなりそうなので最大電圧を4.5に上げました。
警告電圧及び最小電圧を少し下げました。
あとは飛ばしながら微調整していきたいと思います。

PIDチューニング!
デフォルトで設定されているPID設定は以下の2つ。(RateProfilesは1つ)
設定は普段飛ばされている機体を参考にお好みで設定してみて下さい。
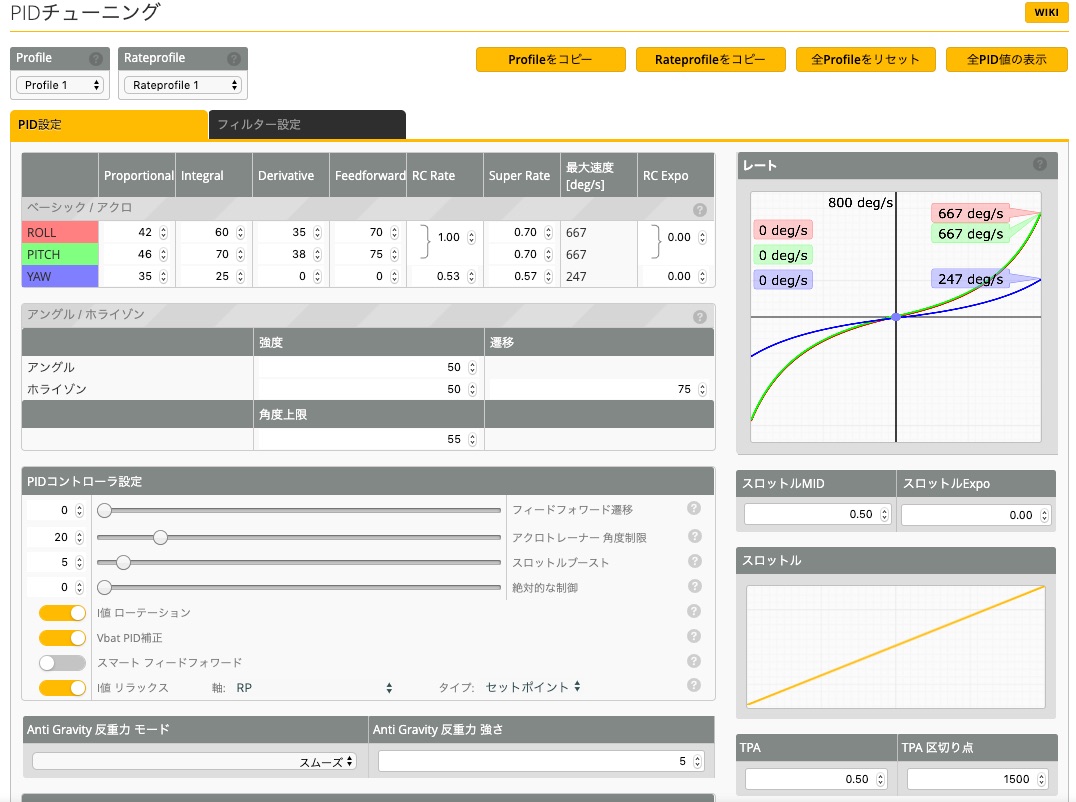

ToothpickはWhoopよりもスロットルを入れたらすっ飛んでいくので、普段より少しレーツを下げてテスト飛行しようと思ったのですが、意外と抑えられたレーツ設定になっています。
テスト飛行の際は数パターン作って調整していきました。
機体とのバインド!
ここまで設定ができたら機体と送信機のバインド作業に移ります。
USB接続のみではFrsky xm+受信機の電源が入らず、バッテリー接続の必要があります。
【CLIコマンドライン】からバインドモードに入る方法もありますが、ここでは受信機のバインドボタンを物理的に押してやっています。
Frsky xm+レシーバーのバインドボタンを押した状態でバッテリーを接続すれば受信機がバインドモード(赤と緑のLEDが点灯)に入るので、送信機とバインドします。

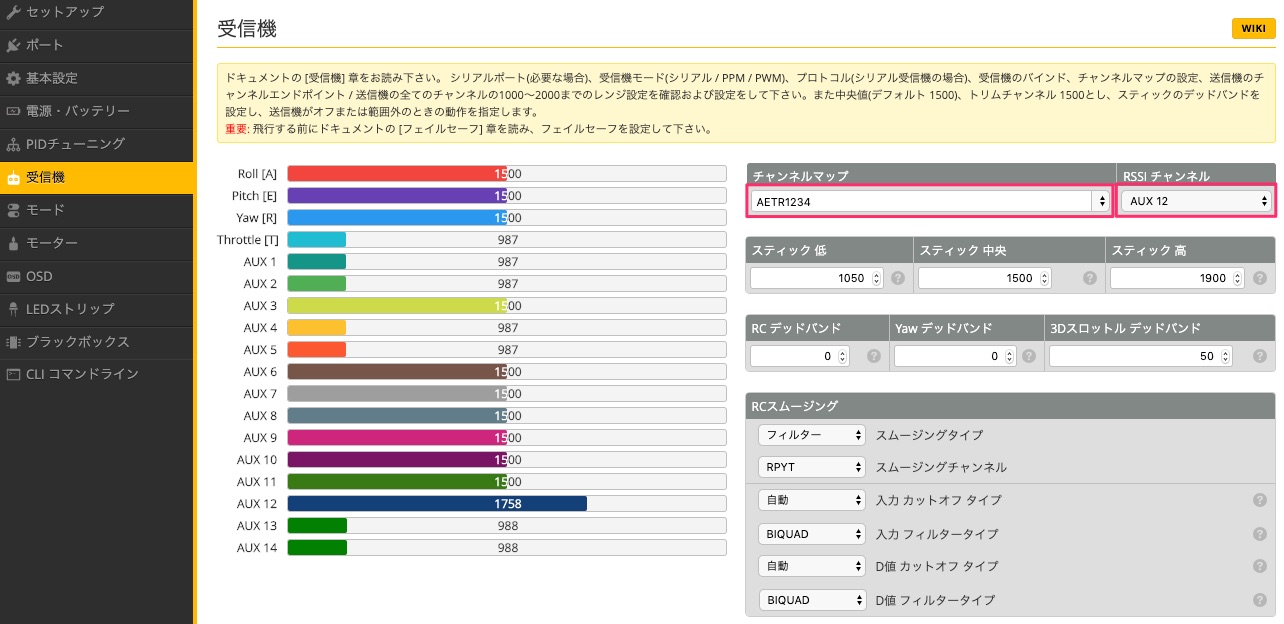
受信機設定!
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
チャンネルマップを確認。(AETR1234)
RSSIチャンネルをAux12に設定して完了です。
モード設定!
初期状態ではARMとANGLEのみ設定されています。
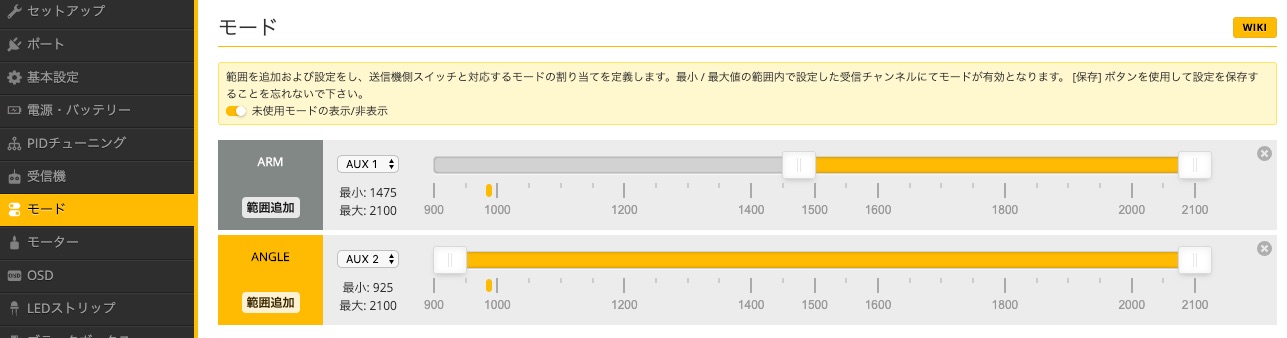
最低限の設定(フライトモード・ブザー等)を追加します。

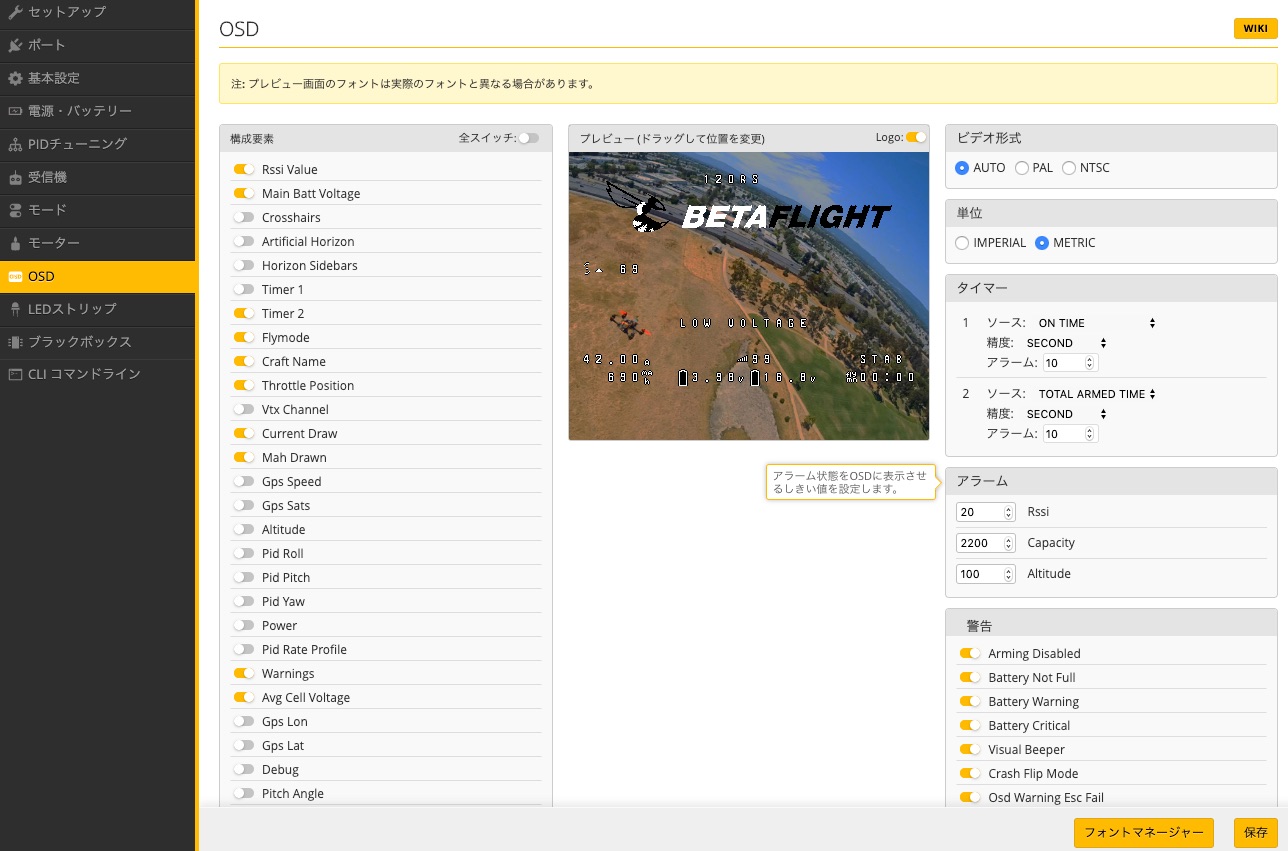
OSD設定!
こちらはお好みで設定して下さい!
(USB接続のみではカメラ電源が入らないためモニターやゴーグル等で確認しながら作業する場合、バッテリーとの接続も必要です!)
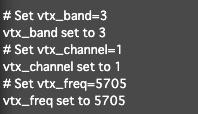
VTXのBand & Channelの設定!
VTXの送信周波数を設定します。
【CLIコマンドライン】から設定していきます。
Set vtx_channel=1
Set vtx_freq=5705
save
ブザーの設定!
上記で機体にブザーの設置をしましたが、【CLIコマンドライン】から以下の設定をしないと鳴らないので注意が必要です!
ブザーの故障?ブザーの極性間違い?等々いろいろ疑いかなりの時間を費やしてしまいました。
ひ〜ち〜さんのブログで解決方法が紹介されていたので助かりました!
set beeper_od = OFF
save
設定データの保存!
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
まとめ!
標準の状態で、フルレンジレシーバー(Frsky xm+)に200mW出力VTX、Caddx Turbo EOS2カメラ搭載とスペック的には申し分ありません!
Toothpickは機体サイズや重量の割に推力が大きくスピード&パワーがあるため、はじめは少し恐怖心がありました。
しかしこれは慣れの部分が大きく、慣れてくるとこの飛びっぷりに完全にハマってしまいます!
2セルバッテリーからテスト飛行を始めましたが、2セルでは機体重量が他のToothpickと比べあるためか少し重さを感じる飛びとなりました。(ちょうど扱いやすいのですが!)
3セルともなるとさすがにパワーがありスロットルの加減(操作)に対して機体操作が追いつかない場面もありと・・・!
これは慣れや技量なんでしょうが、さらに4セルなんていう未体験な部分への楽しみへとつながります。

機体構成に関しては今の私のスキルでは申し分ない構成となっており、他の機体の構成をここまでカスタマイズすることを考えるとトータルコスト的には非常にバランスのとれたいい機体かと思います。
 久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  【iFlight TurboBee 120RS V2】Betaflight設定 & ブザーの取り付けをやってみる!
【iFlight TurboBee 120RS V2】Betaflight設定 & ブザーの取り付けをやってみる!  【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!
【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!  【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!
【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!  【Eachine Tyro89】高スペック&低価格なDIY Toothpick『Eachine Tyro89』【付属パーツ紹介】 【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!
【Eachine Tyro89】高スペック&低価格なDIY Toothpick『Eachine Tyro89』【付属パーツ紹介】 【iFlight TurboBee 120RS V2】トッププレートの形状が変わったV2バージョン。主要パーツ構成は変わらずモーターサイズにより2セルor4セルの選択が出来ます!  【Eachine Tyro89】コスパ最強!DIY Toothpickを組んでみる!
【Eachine Tyro89】コスパ最強!DIY Toothpickを組んでみる!  【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!
【Happymodel Larva X 100mm】200mW出力&DVR機能付きVTX搭載!外部受信機を増設してやればスペックの高いToothpick機となりますね!  【BETAFPV HX100 SE】Betaflight設定&機体バランスについて! 【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!
【BETAFPV HX100 SE】Betaflight設定&機体バランスについて! 【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!  【SKYSTARS TALON X110】ブザーの設置からバインド、飛ばすまでの最低限のBetafilght設定をやってみる!
【SKYSTARS TALON X110】ブザーの設置からバインド、飛ばすまでの最低限のBetafilght設定をやってみる!  【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】 

コメントを残す