
最近あまり飛ばしに行く時間が取れなくまだホバリングテストまでとなっていたHappymodel Larva X HDなんですが、ようやく少し飛ばすことができました。
ノーマルモデル?のLarva X同様、飛ばしやすい機体ですね!
このスペックの機体ですから私が普段よく練習で飛ばしている狭い場所では本来の機体パフォーマンスが出せないのが残念なんですが、デフォルトの2.5インチToothpick形状ではCaddx Baby Turtleカメラ搭載で少し重量は増加していますがLarva Xを飛ばされている方なら同じ感覚で飛ばせられるかと思います。
またこの機体がおもしろいのは機体形状を変えられることなんですが、Betaflight設定に入る前に少しこの機体をご紹介しておきます。
デフォルトの形状は2.5インチサイズの3セルToothpickとなります。

付属キャノピーに変更することにより3インチToothpick形状に変更も可能で、さらにダクトを取り付けることによりWhoop形状としても飛ばすことができと非常におもしろい機体となります。

構成的にはFrsky xm+受信機に200mW出力VTX、Caddx Baby Turtleカメラ搭載とスペック的には申し分なく、カメラ以外の構成はLarva Xとほぼ同じとなっています。
さらにTATTU 3セル450mAhバッテリーが2本付属しておりお得感もあります!

それではHappymodel Larva X HDの最低限のBetaflight設定をやっていこうと思います。
目次
【Happymodel Larva X HD】バインドからBetaflight設定をやってみる!

こちらの機体はFrsky xm+受信機搭載モデルなんですが、Betaflightに接続しファームウェアを確認するとCRAZYBEEF4DX 4.0.5でした。
普段Crazybee系FCを使う事が多くFrskyの場合CRAZYBEEF4FRなんですが・・・あれ?DXってなんぞや?

マニュアルを見てみるとCrazybeeF4DXはExternal RX version、つまり外部受信機タイプのFCのようです。
ということは、SPI(内蔵受信機)は搭載されていないってことで、このタイプのFCはお初かな?
Crazybee系FCを使った機体は手元に数え切れないくらいありますが全てSPIタイプのものに受信機を増設する形でこれまで使ってきました。

このクラスの野外機はFC内蔵受信機では非常に心もとないので、これまで受信機の増設をやってきました。
Larva Xの方もFC内蔵受信機から受信機を増設して現在飛ばしていますが、もうこのクラスの機体には内蔵受信機は不要ですね。

では本題のBetaflight設定をやっていきましょう。
ほぼデフォルト設定で問題なく飛ばせるかと思います。
初期状態の設定を保存
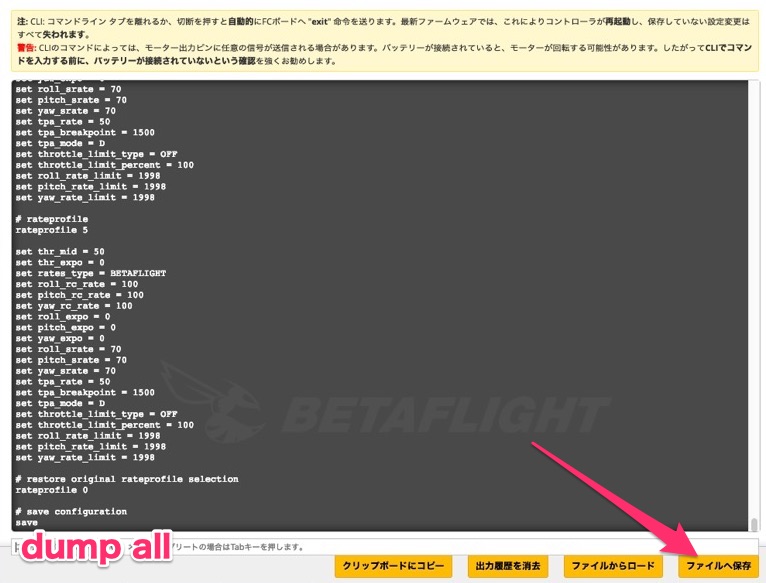
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
ポート設定
[ポート]設定はデフォルトで特に問題なさそうですね。
今回ご紹介しているモデルは、Frsky xm+レシーバー搭載モデルとなります。
UART1はシリアル受信設定、UART2にSmart Audioが割り振られています。

基本設定
こちらも基本的にほぼデフォルトの設定で問題ないかと思いますが、変更した箇所を中心に見ていきます。
今回Larva X HDのデフォルト形状?(2.5インチToothpick形状)での設定をやっていきます。
Whoop形状や3インチToothpick形状ではPIDやRate設定など細かい部分は変わってくるかと思いますが、バインドから飛ばせる状態にするまでの基本的な設定に限定してご紹介していきます。
まずは、[モーター回転方向を逆転]設定に変更しました。
初飛行ではノーマル状態で飛ばしましたが、Toothpick形状の機体ではWhoop形状の機体と比べWashOutなどの挙動は出にくいためモーター回転方向の逆転設定はあまり意味ないのかな?と思いますが、基本的に他の機体もProps Out設定で飛ばしているのでペラの向きが機体によって変わるのが面倒なので今回この設定で進めていきます。
また、[MOTOR_STOP]をオフに変更しました。
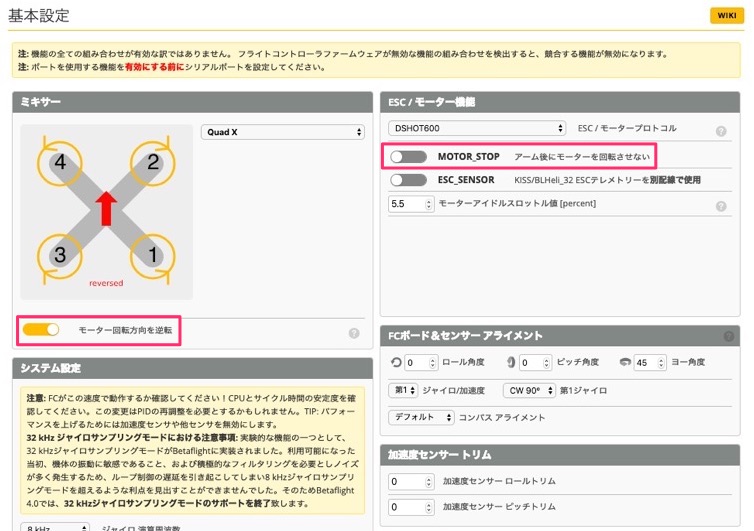
FCボード&センサーアライメントの項目は、第1ジャイロにCW90°・ヨー角度45°設定がされています。

前回、機体を解体して内部構成をチェックした際は気にしていませんでしたが、FCのマウントがなるほど!おもしろい方向でマウントされています。
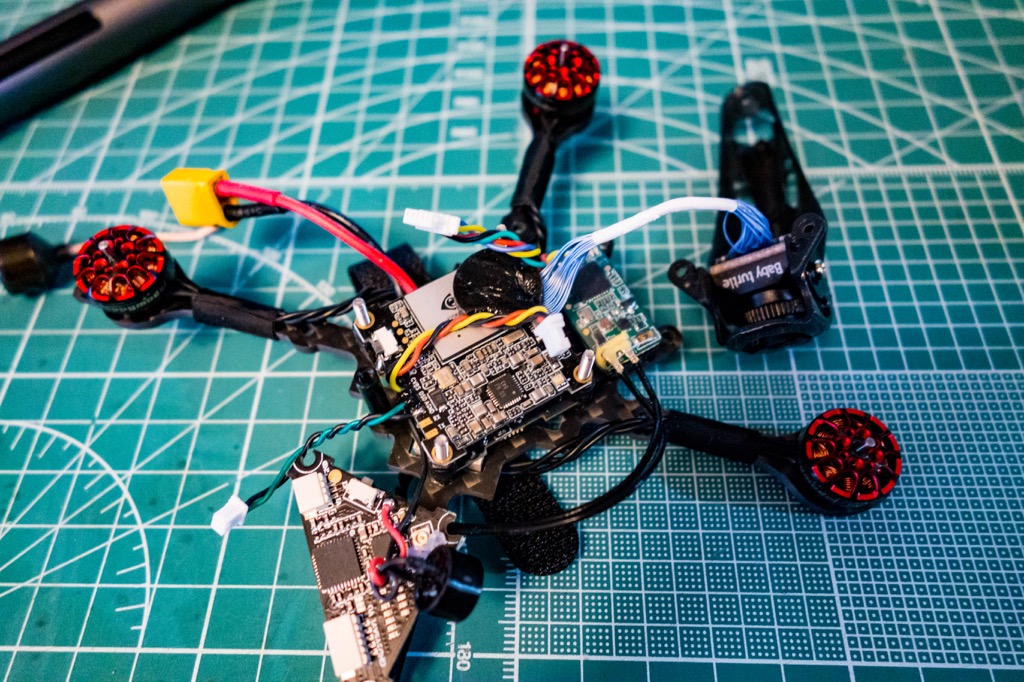
デフォルトでFCマウント方向はちゃんと設定されているので特に変更の必要はありませんが、設定&実際のFCマウントを見比べてみると勉強になりますね!
FCの故障等により載せ替えや変更する際はこの設定にする必要があります。
Sailfly-Xではこの作業でかなりハマった記憶があります。
[アーム最大角]はデフォルトで180°に設定されているので問題ありませんね。

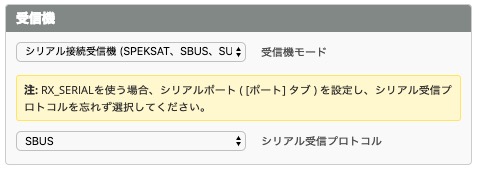
[受信機設定]はシリアル接続受信機に設定、シリアル受信プロトコルはSBUSに設定されています。
これも問題ないですね。
[エアモードを常時使用]はON設定に変更しました。
こちらは普段飛ばされている機体設定を参考にお好みで!
あとはデフォルトのままで問題なさそうです。

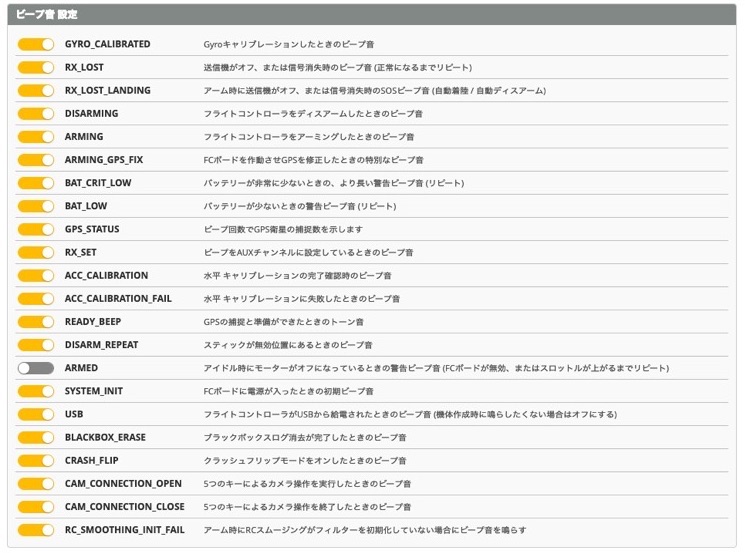
[Dshotビーコン設定]はON設定に変更しました。

あとは問題なさそうですね。
電源・バッテリー
最大電圧の項目を4.4Vから4.5Vまで上げました。
HVタイプのバッテリー使用が普段メインなので4.5V設定にいつもしていますが、付属のTATTUバッテリーってHVタイプではなく通常Lipoタイプのバッテリーなので4.4Vのままの方がいいのかな?(特に問題ないのでこの設定で飛ばしています)
バッテリー警告電圧は少し下げました。
これくらいの数値で問題ないかと思います。
あとは飛ばしながら微調整すれば問題ないかと思います。

PIDチューニング
PID ProfileとRate Profileのデフォルト設定はこちら。
ともにPID Profile1とRate Profile1がデフォルト値です。


その他フィルター等の設定はデフォルトのまま進めていきます。
機体とのバインド
ここまで設定できたら次に機体と送信機をバインドさせます。
Frsky xm+受信機の場合、受信機のバインドボタンを押した状態でUSB接続し給電させるとバインドモードに入ります。
受信機の赤と緑のLEDが点灯状態になります。(バッテリー接続の必要はありません。)

あとは送信機側もバインドモードにし機体とバインドが完了すると受信機のLEDが点滅状態となります。
バインドが完了したら一旦電源を切り、再びBetaflight設定に戻ります。
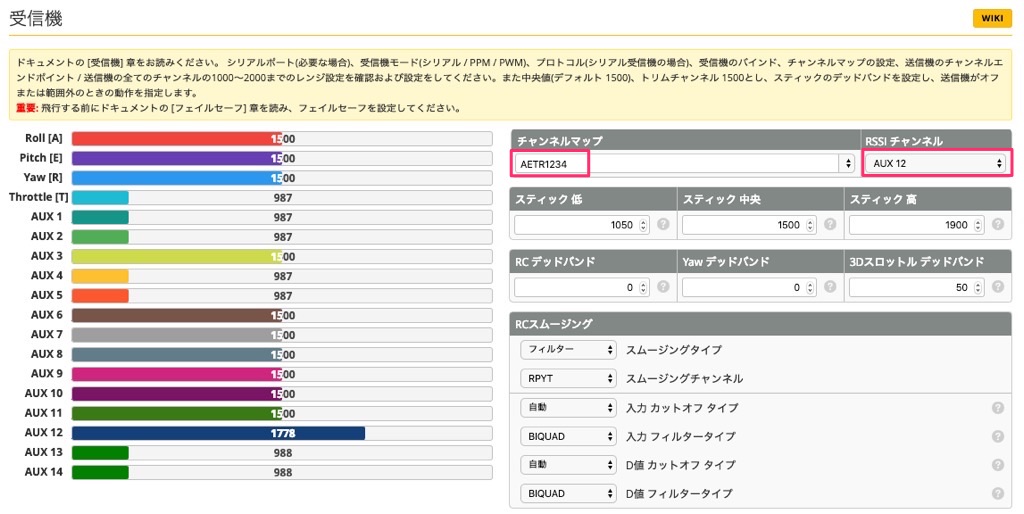
受信機
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
今回こちらでは受信機Frsky xm+で説明していきます。
チャンネルマップをAETR1234に設定し、RSSIチャンネルをAUX12に設定して完了です。
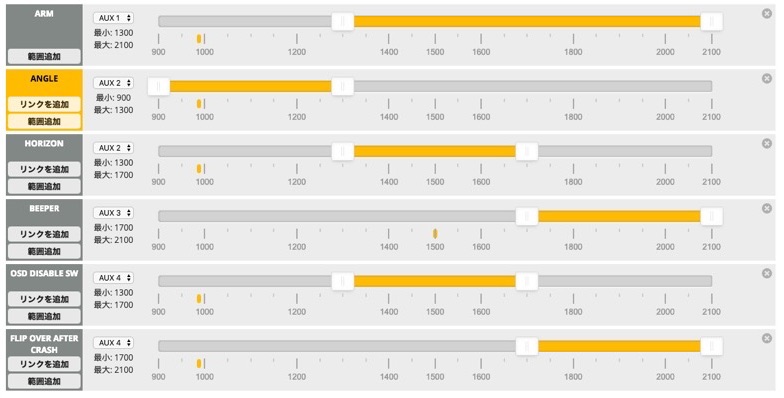
モード
こちらがデフォルトで設定されていた項目です。
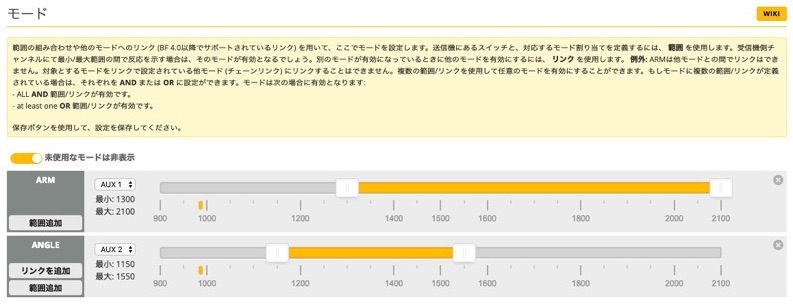
FlightモードやBEEPER、FLIP OVER AFTER CRASH(タートルモード)などを追加しました。
OSD
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。

VTXのBand&Channelの設定
VTXのBandとChannelも設定しておきましょう。
BF4.0.5なので【CLIコマンドライン】から設定した方が簡単ですね!
set vtx_channel=1
set vtx_freq=5705
set vtx_power=3(”=1″ 25mW・”=2″ 100mW・”=3″ 200mW)
save
設定データの保存
これでBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を【CLIコマンドライン】から保存しておきます。
[diff all]で差分バックアップを取って完了です。
BLHeliでモーターReversed設定&ペラの入れ替え
モーター回転方向の変更をしない場合はこの項目は飛ばして下さい!
上記Betaflightでの設定で[モーター回転方向を逆転]設定しました。
BLHeliから全てのモーター(ESC)をNormal→Reversed設定に変更します。
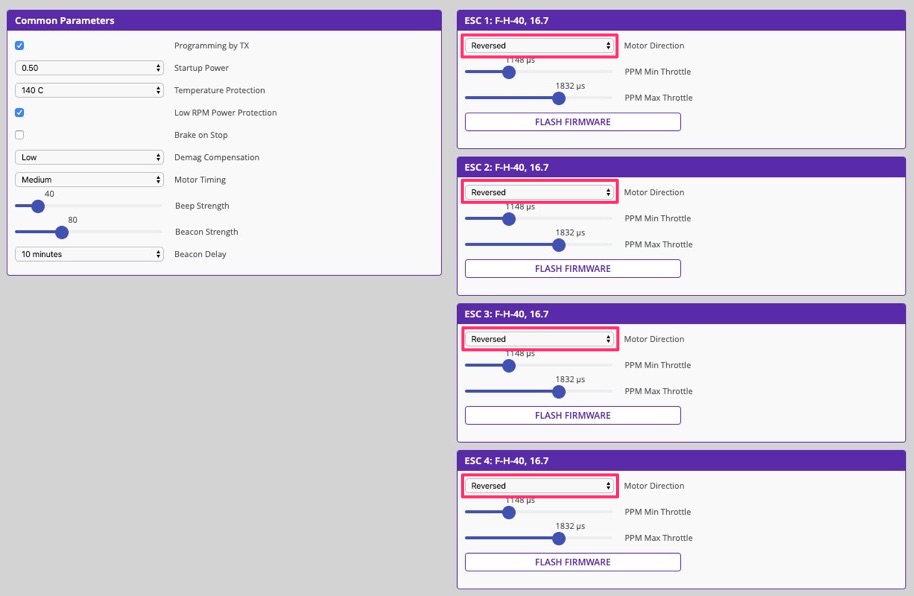
そしてBLHeliでのReversed設定が完了したら、ペラを入れ替えて(Props Out構成)完了です。

まとめ
これでHappymodel Larva X HDを最低限飛ばせる状態にできました。
あとは細かい設定などご自分の好みで変更していって下さい。

標準の2.5インチToothpick形状からキャノピー&ペラを変えて3インチToothpick、さらにWhoop形状に変更といろいろ楽しめる機体となっています。
2.5インチToothpick形状では、Larva Xに比べ機体サイズが大きくなり搭載カメラもCaddx Baby Turtleとなっているので約13gほど重くなっているのですが、Larva X同様非常に飛ばしやすい印象です。
Larva Xは結構な回数大破させていますが(キャノピーがよくすっ飛んでいく!)まだ現役で頑張ってくれています。
現状の私の練習ではHDカメラってあまり必要なく・・・このLarva X HDもノーマルカメラでガンガン飛ばしてあげる方が楽しいのかな?なんて考えていますが・・・
また3インチサイズの機体はまだ飛ばしたことがないので、キャノピー&ペラ変更で3インチToothpick形状でも飛ばしてみたいのですが、なかなかこのサイズの機体を飛ばす場所がなくて・・・
まぁ、いろいろと楽しめる機体です!
野外テスト飛行では問題なく飛ばすことが出来たので、もう少し設定を詰めていき楽しみたいと思います。



コメントを残す