
先日仲間になった75mm 3セルWhoop『Supra7 Pro』なかなかいい機体です!
3セルWhoopは手持ちの機体でいうとBeta85XやUR85など85mmサイズのイメージがあるのですが、75mmサイズの3セル機ってあったかな?
部屋を占領しているWhoopくんたちを見てみましたが、FullSpeed TinyLeaderが3セルに対応した75mm Whoopとなります・・・が、こちらはCineWhoopとなりますね。

私の中では75mm Whoopでの3セル機はあまりイメージがなかったのですが・・・よく飛んでくれる機体です。
そもそもこのサイズ&重量ですから、3セルで飛ばないわけはないのですが・・・

そんなSupra7 Proなんですが、みなさんご存知の2セルWhoopの代表機とも言えるMobula7やTRASHCANの完全に上位互換機的な位置付けの機体になるかと思います。
両機とも飛ばしやすくよく飛んでくれる機体なので、これまでいろいろとカスタマイズをさせてきました。
最終的にCaddx Turbo EOS2カメラに200mW出力VTX、さらにフルレンジレシーバーFrsky xm+を増設した機体構成となりました。
また85mmにサイズアップさせたりToothpick化などでさらに面白い飛びとなりました。
ここまでカスタマイズさせた両機なんですがSupra7 Proでは標準でこの機体構成となっており、さらにFC内蔵のESCは12A対応の3セル機となっています。
完全にMobula7やTRASHCANの上位機になるかと思います。
個人的にかなり興味をそそられる機体で、今後85mmフレーム化やToothpick化なども試してみたいと思っていますが、とりあえずはもう少し75mmサイズでの3セル飛行を楽しんでからやってみます。
そして前回このSupra7 Proの機体構成を紹介したのですが、多くの方に見て頂いているようで早くもこのサイト経由で数名の方がご購入されています。

今後この機体の良さを少しずつご紹介出来たらと考えていたのですが、興味を持たれている方の多さに驚いています。

機体構成だけ見てもスペックの高さは分かるかと思います。
Mobula7やTRASHCANの購入を検討されている方で今後2セル以上の機体もとお考えなら選択肢の一つに入る機体ではないでしょうか。
カスタマイズ等は今後ご紹介したいと思いますが、今回はこのSupra7 Proを飛ばせる状態にするまでのバインドからBetaflightの設定をやっていこうかと思います。

目次
【Supra7 Pro】Betaflight設定をやってみる!
標準で入っているファームウェアのバージョンはBTFL3.5.7です。
このまま進めていきたいと思います。

では本題のBetaflight設定を見ていきます。
ほぼデフォルト設定で問題なく飛ばせるかと思います。
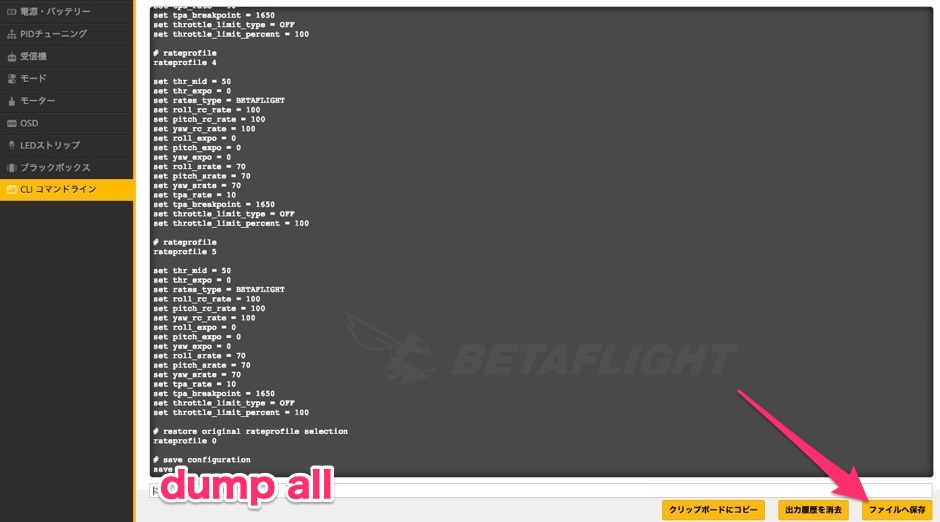
初期状態の設定を保存!
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
ポート設定!
[ポート]設定はデフォルト状態で特に問題なさそうですね。
Frsky xm+レシーバーが取り付けられているのでUART1はシリアル受信設定となっています。

基本設定!
[モーター回転方向を逆転]設定に変更しました。
初飛行ではノーマル状態で飛ばしましたが、やはり75mmサイズの機体ではWashOutの挙動が見られます。
Whoop形状では完全に消す事はできないのでしょうが?モーター回転方向をProps Out構成にしておくとかなり軽減されるようです。
そして[MOTOR_STOP]をOFFに変更。
[アーム最大角]はデフォルトの25°から180°に変更しました。

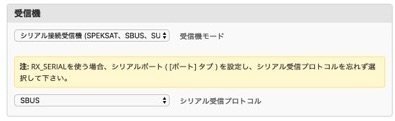
[受信機]設定は、シリアル接続受信機でSBUSに設定されているのでこれは問題ないですね。
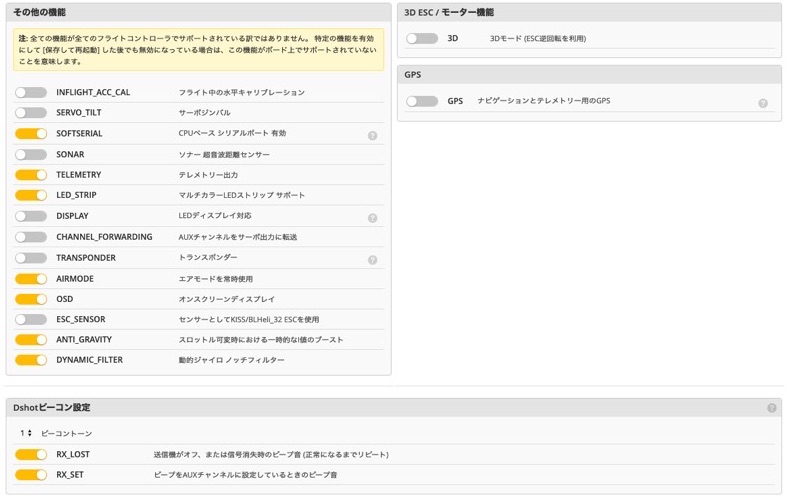
[エアーモードを常時使用]はON設定に変更しました。
こちらは普段飛ばされている機体設定を参考にお好みで!
また、[Dshotビーコン設定]はON設定に変更しました。
あとはデフォルトのままで問題なさそうですね。
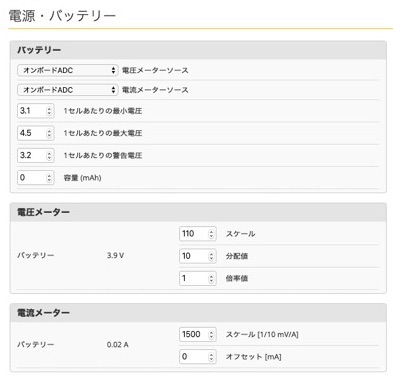
電源・バッテリー!
HVタイプのバッテリー使用がメインなので最大電圧の項目を4.3から4.5Vまで上げました。
最小電圧及び警告電圧は少し下げました。
これくらいの数値で問題ないかと思いますが、あとは飛ばしながら微調整していけばいいかと思います。
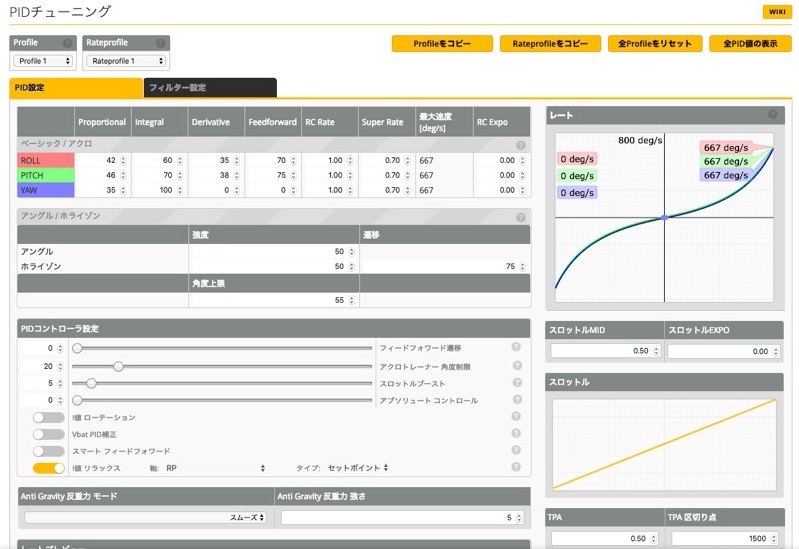
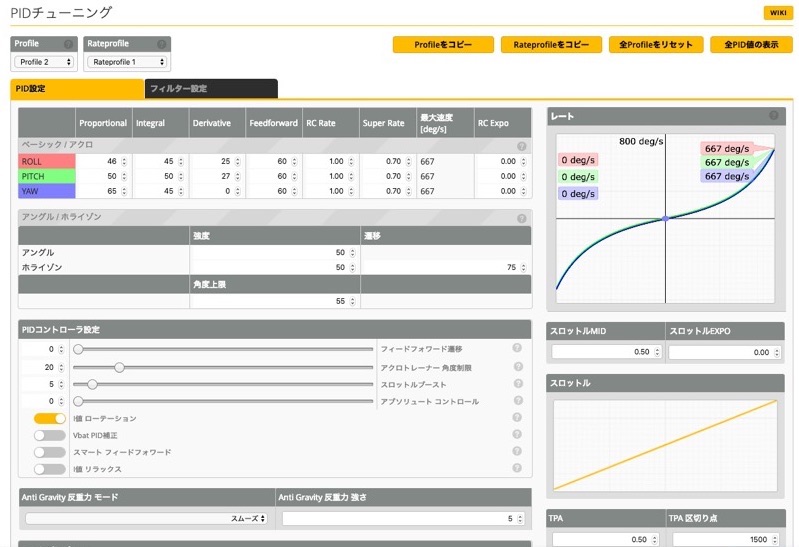
PIDチューニング!
PID Profileはこちらの2パターン用意されています。
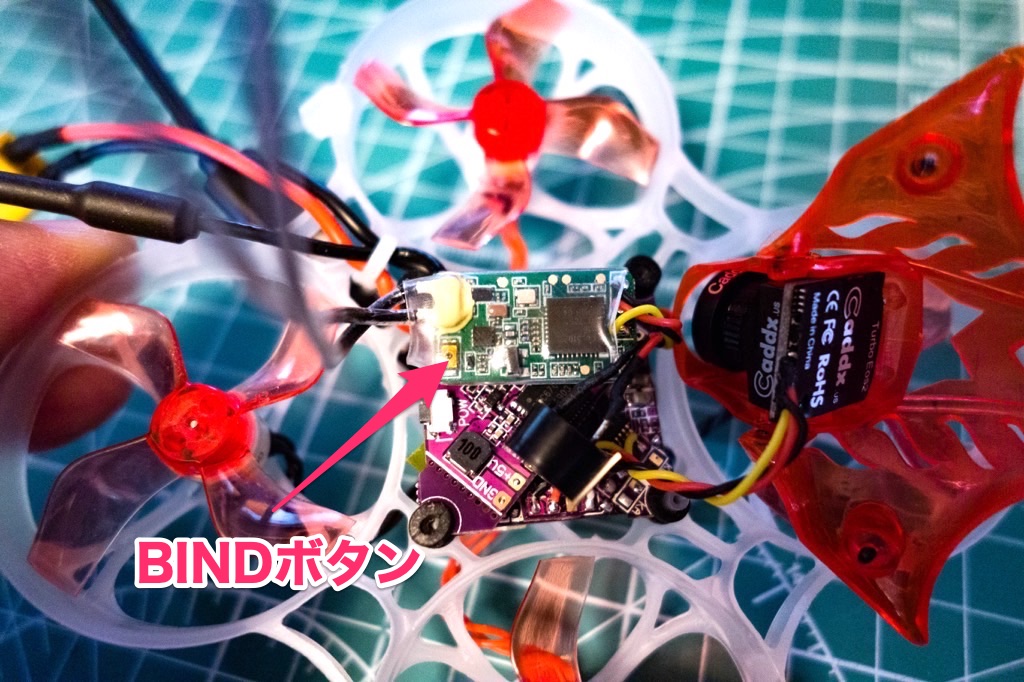
機体とのバインド!
ここまできたら機体と送信機をバインドさせます。
Frsky xm+受信機のバインドボタンを押した状態でUSB接続し給電させるとバインドモードに入ります。(バッテリー接続の必要はありません。)
受信機の赤と緑のLEDが点灯状態になります。
あとは送信機側もバインドモードにし機体とバインドが完了すると受信機の赤色LEDが点滅状態となります。
バインドが完了したら一旦電源を切り、再びBetaflight設定に戻ります。
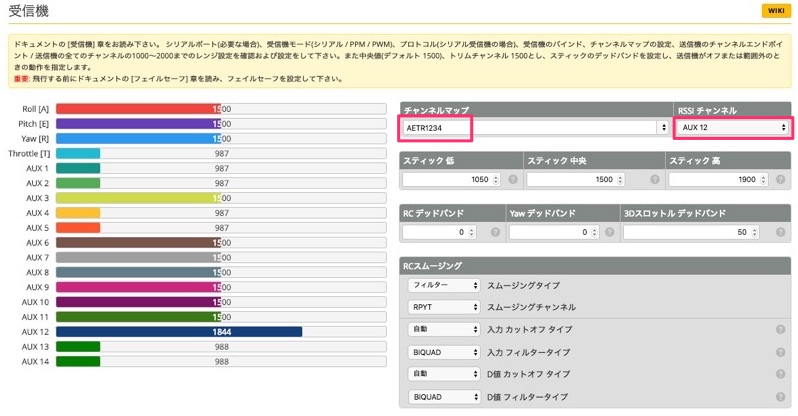
受信機!
送信機とのバインドが完了したら次に【受信機】タブへと移ります。
今回こちらでは受信機Frsky xm+で説明していきます。
チャンネルマップをAETR1234に設定し、RSSIチャンネルをAUX12に設定して完了です
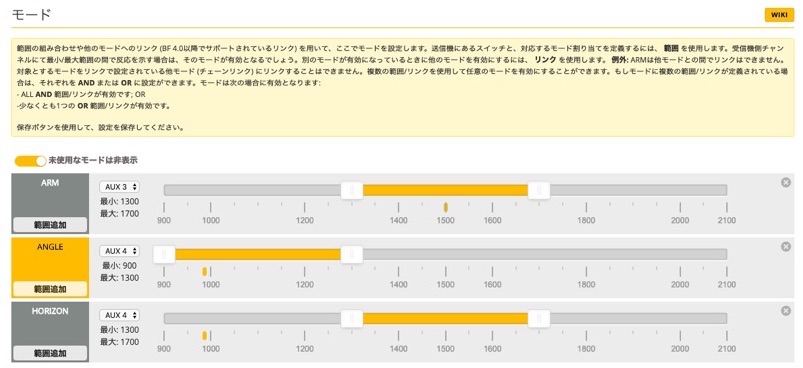
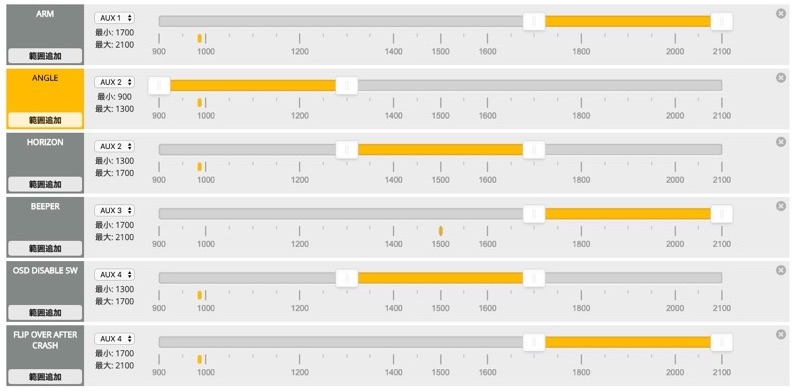
モード!
こちらがデフォルト状態で設定されている項目です。
BEEPER(ブザー)やFLIP OVER AFTER CRASH(タートルモード)などを追加しました。
OSD!
こちらもお好みで設定して下さい。
いつも私はこんな感じで設定しています。

VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきましょう。
【CLIコマンドライン】からサクッと設定。
set vtx_channel=1
set vtx_freq=5705
save
設定データの保存!
これでBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップを取って完了です。
BLHeliでモーター回転方向を逆転&ペラの入れ替え!
上記Betaflight設定で[モーター回転方向を逆転]設定にしました。
BLHeliから各モーターにReversed設定をかけペラも入れ替えます。(バッテリーの接続の必要はありません)
標準状態で[Normal→Reversed][Reversed→Normal]に変更します。
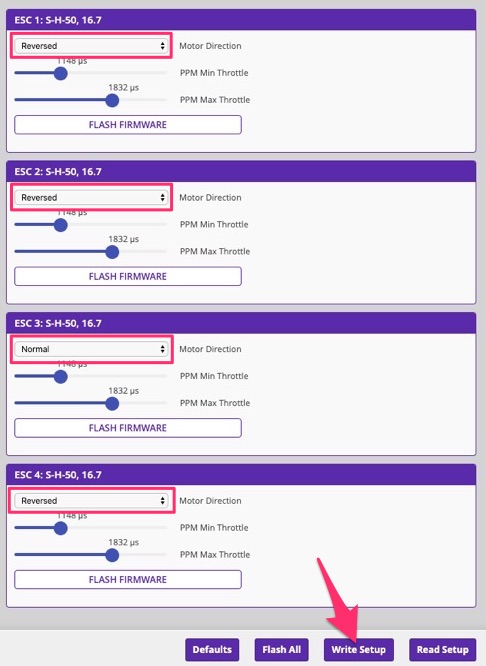
そしてBLHeliでのReversed設定が完了したら、ペラを入れ替えて完了です。

まとめ!
これでSupra7 Proを飛ばせる状態にできました。
機体スペックは高くもう手を加えてあげる部分が見つかりませんが、今後サイズアップやToothpick化などでいろいろ楽しめそうな機体です。
2セルWhoopMobula7をはじめて飛ばした時も感じましたが、このSupra7 Proでもデフォルトで飛ばしやすい設定になっているようです。

数回飛ばしメンテして感じたのが、キャノピー内に受信機とブザーを格納する標準の形では結構スペース的にいっぱいで、キャノピーの取り付け&取り外しが非常に厄介で面倒です。
受信機をFC下のバッテリーホルダー上部分に持っていくのがいいようです。
また機体調整時のUSB端子の差し込みも付属しているL型プラグを使いと・・・なかなか毎回となると面倒です。
そして75mm Whoopでは08系のモーターが使われている事が多いのですが、TRASHCANやBeta75 Pro2などは11系のモーターに変更することにより安定感&飛行時間がアップした経験があるのでこちらも気になります。


最終的には85mmサイズにアップさせようかと思っているので、その際は11系モーターが望ましく?なるかと思うので早い段階でモーター変更も試してみたいと思っています。








コメントを残す