
久しぶりにEachine TRASHCANのカスタマイズをやってみました。
今回のカスタマイズは、標準の0803モーターを1103モーターに載せ替えるというものです。
前々からやろうやろうと思っていたのですが・・・いろいろやっていると後回しに・・・。
最近、tadaken⌘droneさんがやられているのを見てやってみることに。
朝活Trashcan1Sx2本x8回。
楽しいー。
スロットル具合に気をつけないと、抜き過ぎると抜くとお尻からヘナヘナとしている感じ。 pic.twitter.com/tsS3Id2yKO— tadaken⌘drone (@tadakendrone) July 20, 2019
そもそもなぜこのTRASHCANに1103モーターかというと、まずは標準の0803モーターの発熱が結構酷いことが挙げられます。

08系のモーターか使われている機体は他にMobula7やBeta75 Pro2などを持っていますが、やはり飛行後のモーターの発熱が大きく飛ばし方によっては飛行直後は触れないほどまで発熱なんてこともあります!


PID等の調整である程度は抑えられるとは思いますが、Beta75 Pro2を1103モーターに変更してみたところモーターの発熱がなくなり、さらに飛行時間が1分以上も延び安定感も増して非常に飛ばしやすい機体となりました。
Beta75 Pro2は現在もこの構成で飛ばしています。
おそらく75mmフレームサイズではベストな構成だと思います。


75mmサイズの2セル機での08系モーターはどうも私は好きになれず、ワンサイズ大きい1103モーターをTRASHCANにも載せてあげました。
結論から言いますと、やはりモーターの発熱はなくなり(ほんのり熱くなる程度)飛行時間も延びます!
安定感に関しては、まだ飛ばし込んでいないのでハッキリとは言えませんがいいと思います。
Mobula7やTRASHCANを飛ばしたことがある方なら分かると思いますが、75mmフレームでの08モーターの飛びは非常に軽快で気持ちいいものです!
逆に言うと非常に飛びが軽すぎる感じですかね!

はじめて飛ばした時はこの軽い飛びが飛ばしやすく感じていましたが、慣れてくるとBeta75Xのようなズンッと重い(どう表現したらいいか?)飛びの安定感には及ばず・・・。
そのちょうど中間あたりの飛びになるという表現が分かりやすいかと思います。
Beta75 Pro2の1103モーター機の場合は、Beta75Xでは酷かったWashOutがかなり抑えられる印象で機体性能(安定感)はBeta75Xを上回っているかと個人的には思っています。
今回のTRASHCANの1103モーター機の場合も同様の印象を受けます。
もう少し飛ばしてみないとハッキリとは言えませんが標準の0803モーターにはもう戻せない感じです。
75mmフレームサイズのWhoopには一般的に6A ESCが使われていることが多いと思いますが、この構成ではワンサイズ大きい11系のモーターでの運用が個人的には気に入っております!
そしてさらに言うと、昨日発売された85mmフレームサイズのBeta85 Pro2の飛びも非常によく!!
上記75mm機の構成でフレームサイズをアップさせただけでWashOutの発生も皆無となり安定感が非常にアップしています。

以前Beta75 Pro2(1103モーター)での85mmフレーム化を個人的に検証し、6A ESCでの85サイズは適さないと個人的には感じていましたが、上記Beta85 Pro2の登場でかなり覆されました!

今回、TRASHCAを1103モーターに載せ替えましたが、最終的にはさらにこの構成での85mmフレーム化がベストになるんじゃないかと感じています。
このあたり話が長くなりそうとともに、かなり話がそれすぎましたので今回の本題に戻します。
Eachine TRASHCANを1103モーターに載せ替えるには標準フレームではモーターをマウントできないので、今回Beta75X Whoop Frameを使いました。
それでは載せ替えていきましょう!
【Eachine TRASHCANカスタマイズ】標準0803モーターから1103モーターに載せ替える!
今回使用したのはBETAFPV製の1103(11000KV) Brushless Motors。
Eachine TRASHCANの標準フレームでは、この1103モーターをマウントできないのでBeta75X Whoop Frameも必要となります。
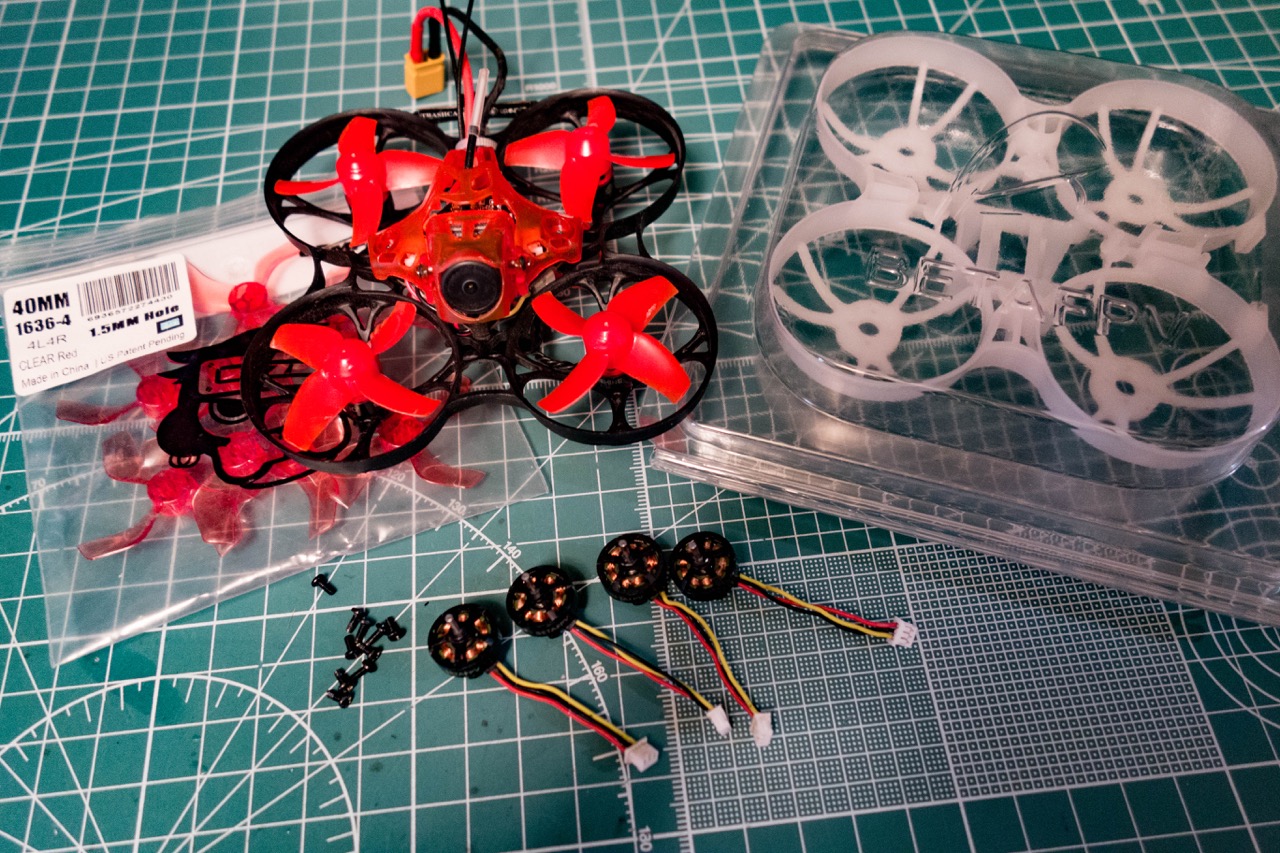
今回ペラは4 Pairs Gemfan 1636を使おうと考えていますが、標準フレームではこのペラではフレームに擦れてしまい使えませんでしたがBeta75X Whoop Frameでは問題ないようです。

Gemfanペラはカラーによって少しサイズが違うようです。
写真の青色ペラでは標準フレームでも問題ないのですが、透明のペラは少しサイズが大きいようで標準フレームでは使えません!
同じ40mmペラでもサイズが少し違うんですね!

ペラのピッチとかが関係してくるのかな?
このあたり詳しいことは分かりません。

それではサクッと載せ替えていきたいと思いますが、その前に現在のTRASHCAの構成ですが、ロスト防止用のブザーを設置し、外部受信機(Frsky xm +)レシーバーを増設しています。

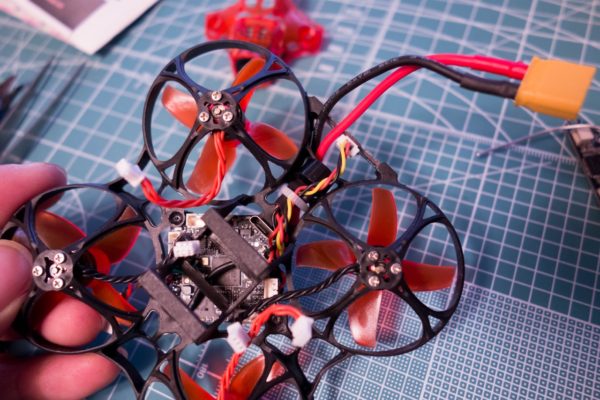

フレームの変更だけなので簡単ですね!
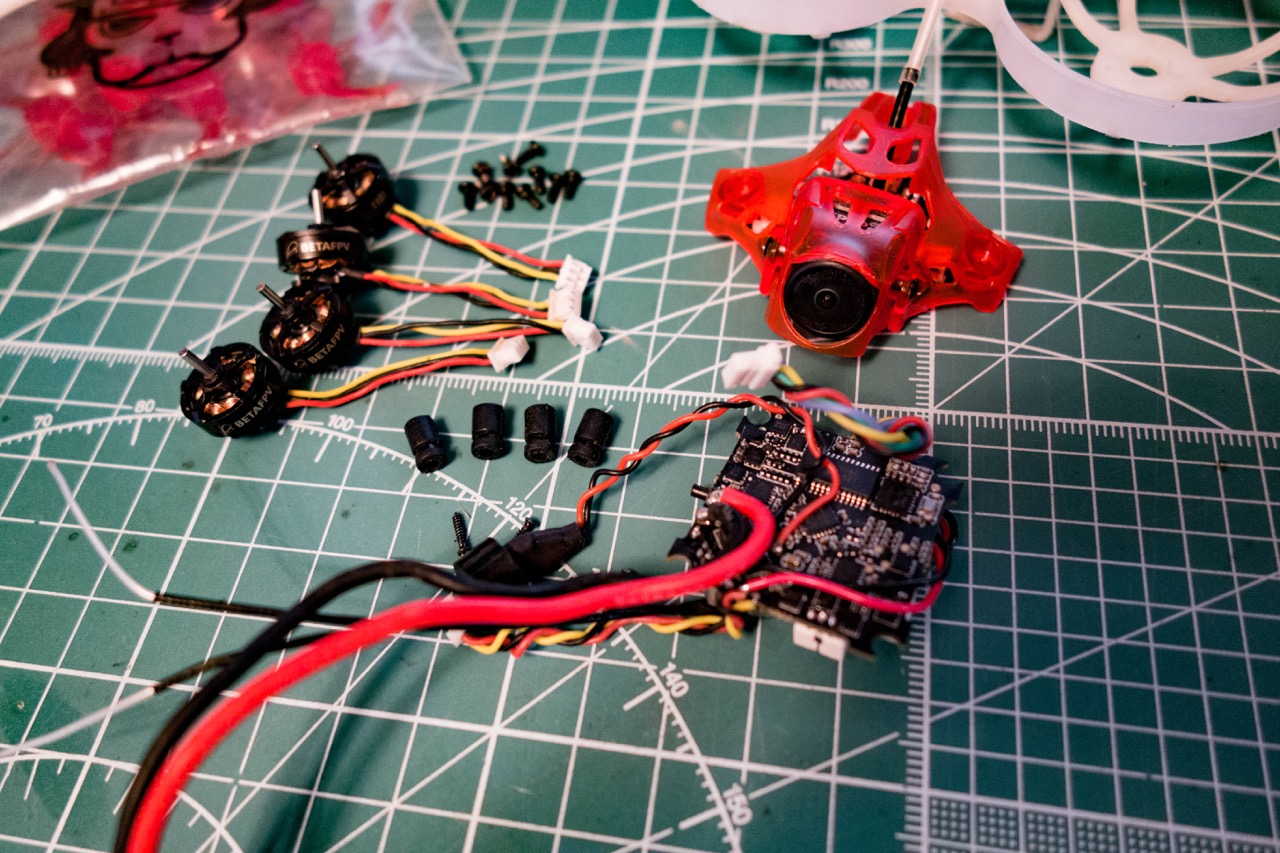
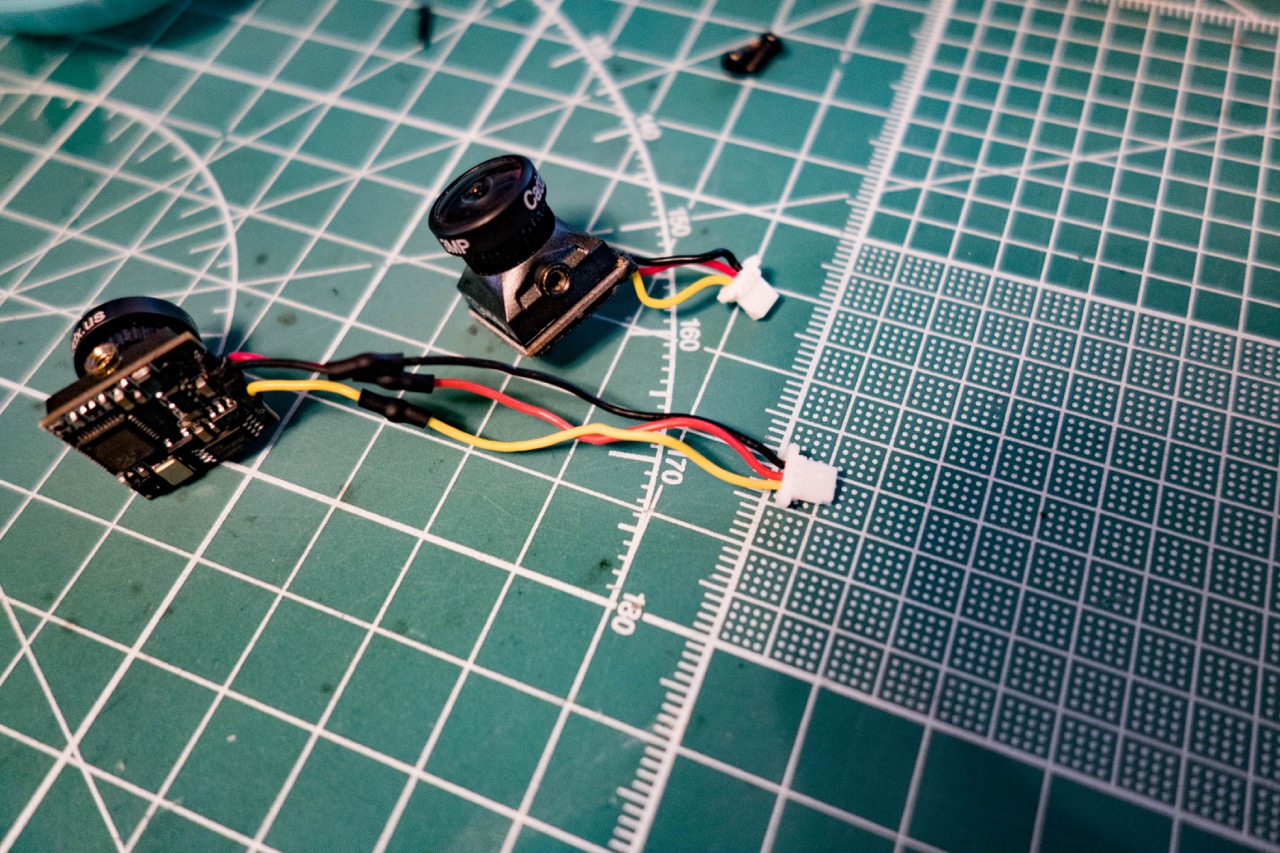
せっかくなのでCaddx Turbo EOS2カメラを標準の16:9のものから4:3タイプのものに変更しました。
これはお好みですが、Whoopは基本的に4:3タイプのカメラの方が個人的には飛ばしやすく今回変更しました。
どうもあの横長画面が見にくく!

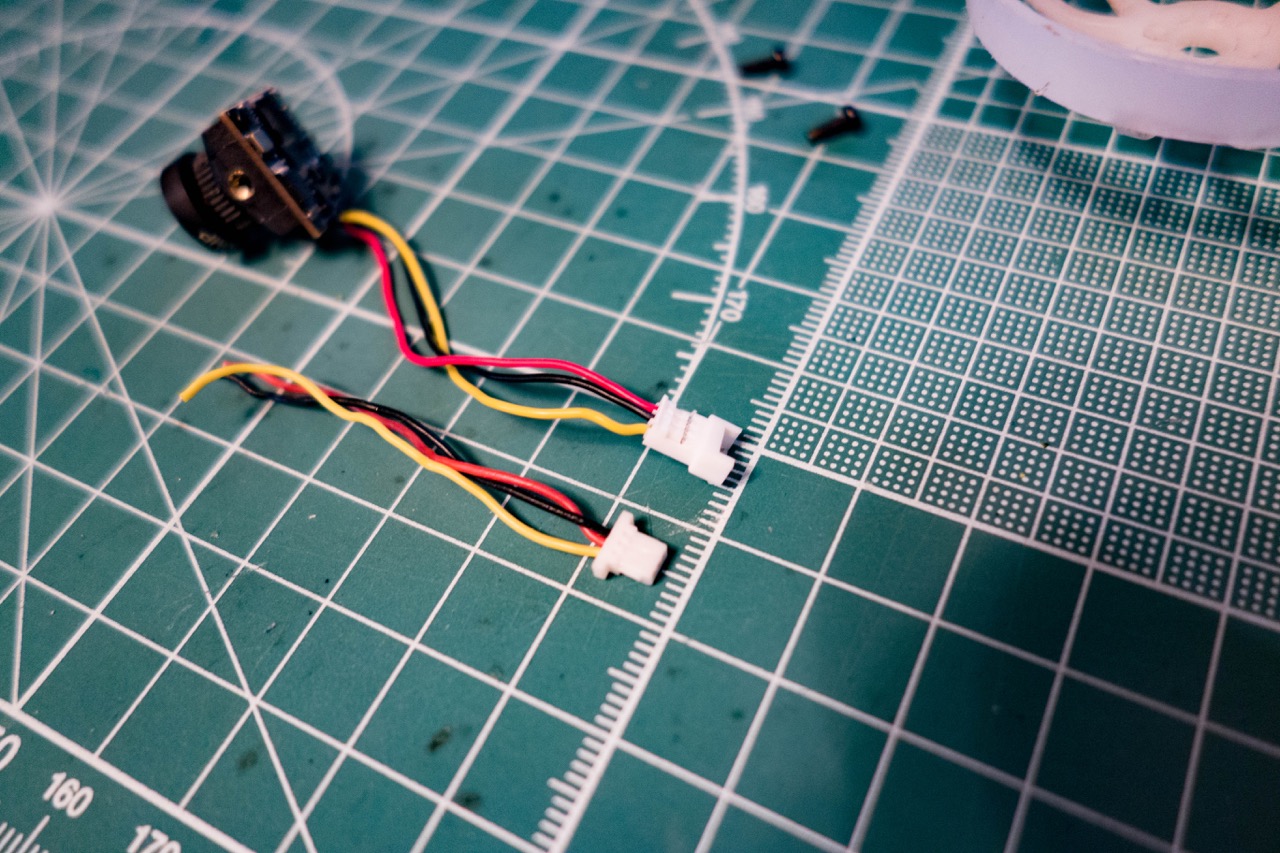
Caddx Turbo EOS2に標準で付いているプラグではWhoop_VTXのプラグと形状が違うので変更が必要です。

今回、Beta75Xフレームへの変更により標準で付いているLED_STRIPの設置がサイズ的に出来なくなります。
特にLEDは必要ないので今回取り除く事にしました。
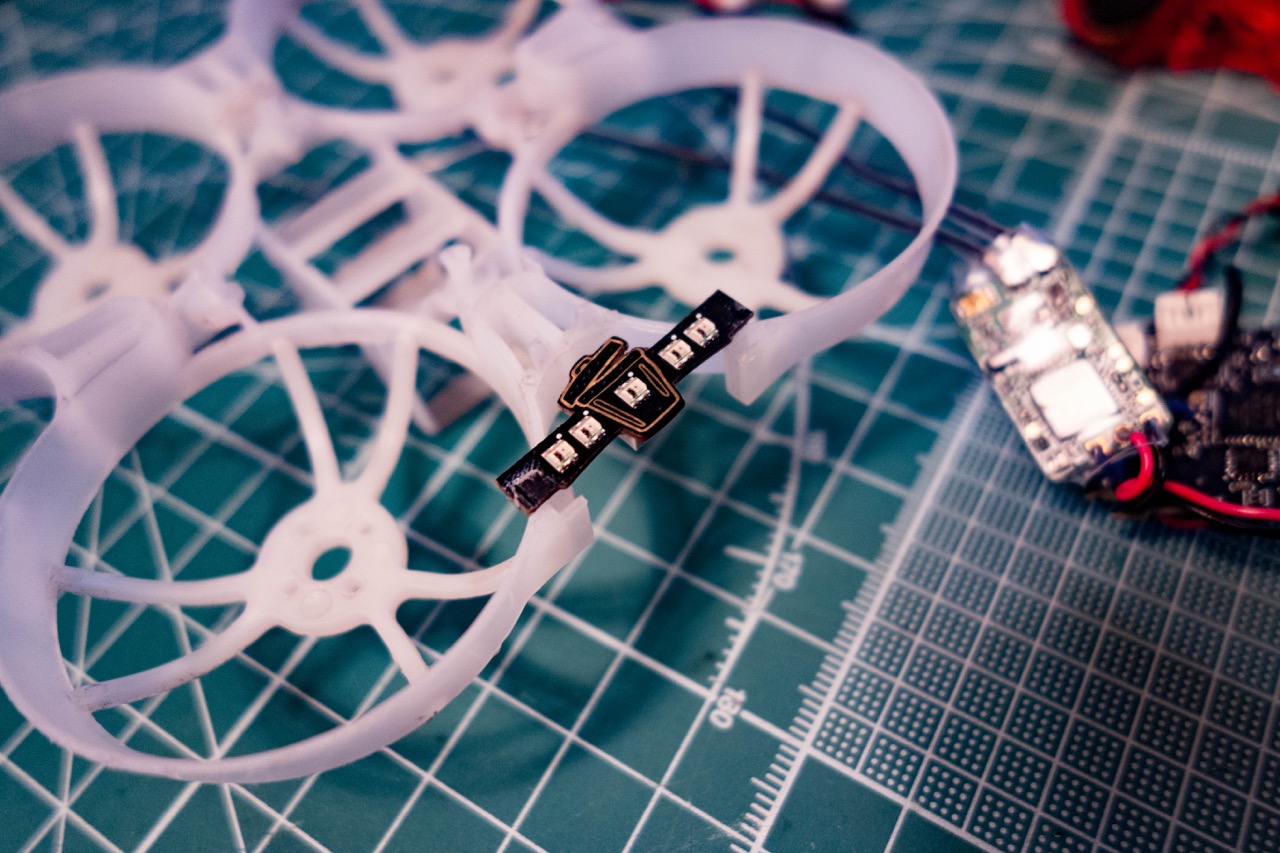
そしてそのLED_STRIP用のコネクタがWhoop_VTXで使えるので助かります!
こんな感じでCaddx Turbo EOS2にコネクタを移植。
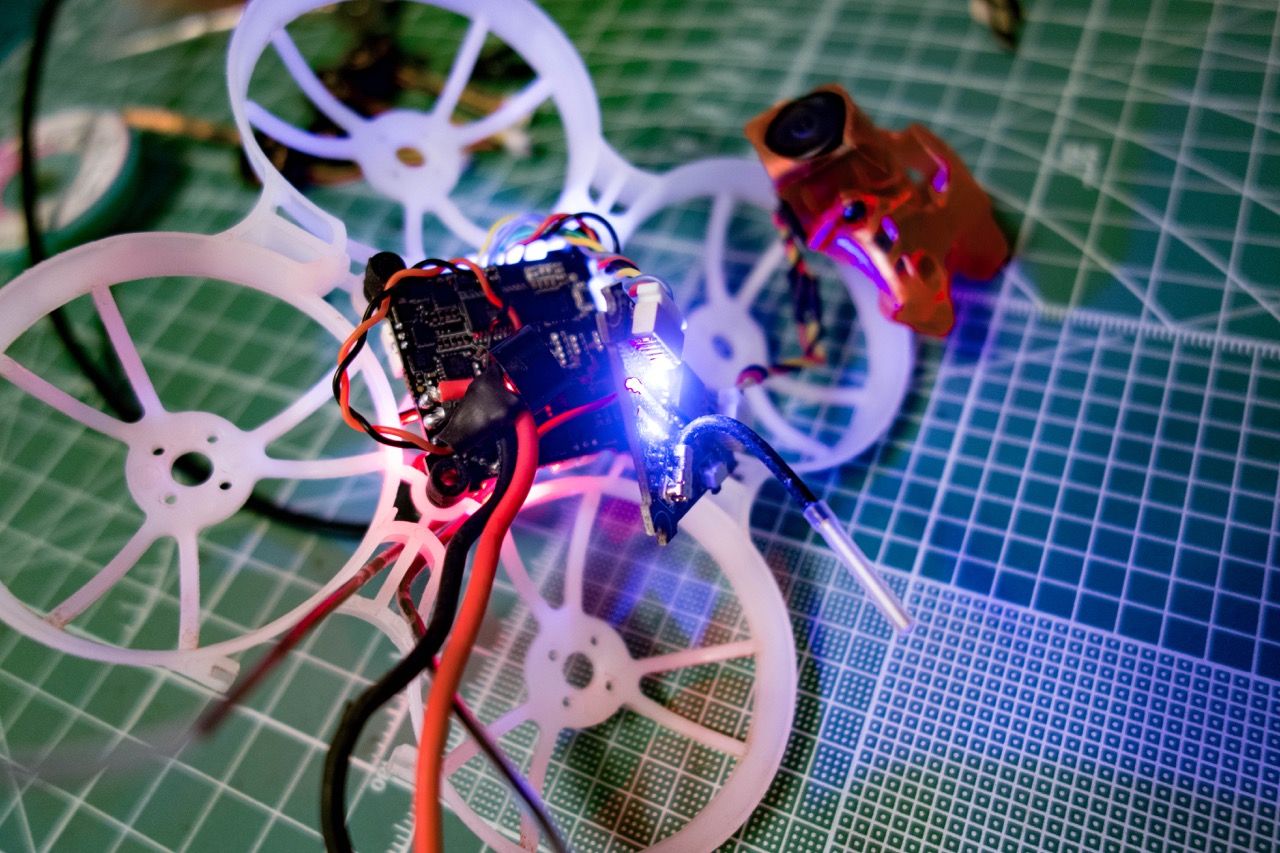
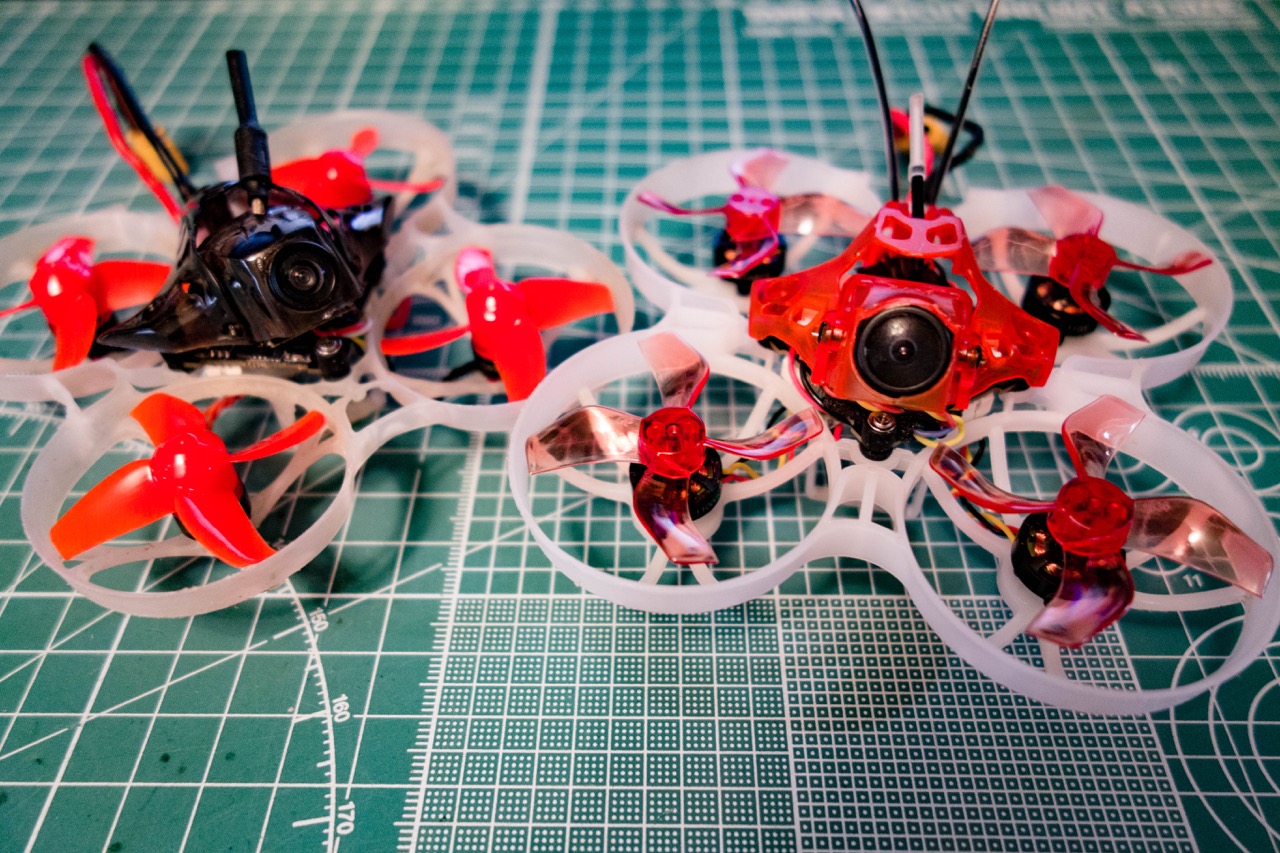
これで1103モーター構成のTRASHCANくんの完成です。
そしてTRASHCANカラー?の赤色Gemfanペラを装着して完了。

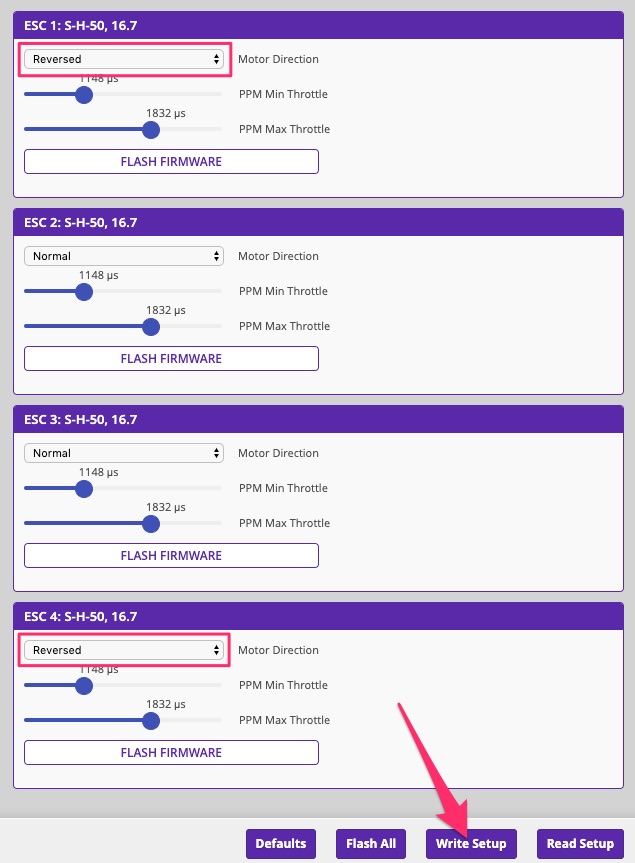
BLHELIで「Moter Reversed」設定!
BETAFPV製の1103モーターにはモーター回転方向(正回転・逆回転)が全て正回転モーターとなっているので、BLHELIを使って「Moter Reversed」設定をして完了となります!
ペラの構成を逆回転構成にしているので、1番4番モーターに「Moter Reversed」をかけておきます。
まとめ!
まだあまり飛ばせていませんが、飛行時間は0803モーターの時より少し延びている印象です。
そして何よりモーターの発熱が少ないのがいいですね!(飛ばし方によっては触れないくらい発熱してたので)
やはり75mmフレーム機には、08系のモーターより11系のモーターの方が適しているのかな!(個人的な感想です!)

軽すぎる飛びより少し機体重量が操作に伝わってくる方が操作しやすい、個人的にはそう感じております。
今回1103モーターに載せ替えたTRASHCANくんですが、こちらも後々85mmフレームに載せ替えてみようかと考えています。
またTRASHCANとほぼ同構成のMobula7も1103モーターへの変更が望ましいのかな?なんて考えていますが、私のMobula7くんは現在、2セル室内機として活躍してくれているのでもう少し先になりそうです。
送信機に以下の設定をしてあげると、2セル機でも室内で簡単に飛ばすことができ、1セル機よりもパワーがあるので楽しいですよ!

こんな所で、今回はこの辺で・・・!

 【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。
【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。  【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!
【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!  【TRASHCAN】野外飛行のために外部受信機(Frsky xm+)を増設!聞き慣れないInverter(反転)SBUS入力とはなんぞや?
【TRASHCAN】野外飛行のために外部受信機(Frsky xm+)を増設!聞き慣れないInverter(反転)SBUS入力とはなんぞや? 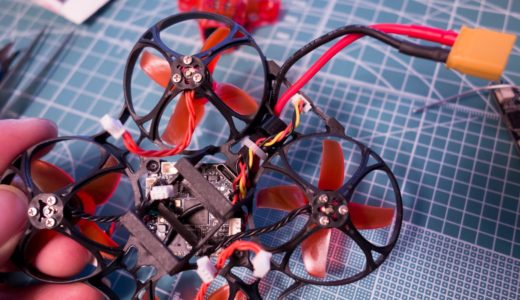 【TRASHCAN】野外ロスト防止にブザーを取り付け&2Sバッテリー運用のためピッグテールをXT30プラグに交換!
【TRASHCAN】野外ロスト防止にブザーを取り付け&2Sバッテリー運用のためピッグテールをXT30プラグに交換!  【TRASHCAN】人気2S Whoop『Eachine TRASHCAN』 。標準で200mW出力VTXやCaddx EOS2カメラ、LEDストリップ搭載と気になる構成!
【TRASHCAN】人気2S Whoop『Eachine TRASHCAN』 。標準で200mW出力VTXやCaddx EOS2カメラ、LEDストリップ搭載と気になる構成!  【Tiny Whoop】室内&野外でもガンガン飛ばせられる軽量2S機『Beta65 Pro2』。Beta65Xより飛行時間が大幅に延び非常に飛ばしやすい!
【Tiny Whoop】室内&野外でもガンガン飛ばせられる軽量2S機『Beta65 Pro2』。Beta65Xより飛行時間が大幅に延び非常に飛ばしやすい!  【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!
【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!  【Tiny Whoop】Whoopくん1台焼けました!ホントは危険なリポバッテリー、管理の重要性を再認識!
【Tiny Whoop】Whoopくん1台焼けました!ホントは危険なリポバッテリー、管理の重要性を再認識!  【URUAV UR85】ブザーの取り付け&飛ばすまでの最低限の設定をやってみる!
【URUAV UR85】ブザーの取り付け&飛ばすまでの最低限の設定をやってみる!  Emax Tinyhawk Ⅱにブザーを取り付ける!作業スペースの確保が難しく難易度は高いです!
Emax Tinyhawk Ⅱにブザーを取り付ける!作業スペースの確保が難しく難易度は高いです!  【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!
【Toothpick】4セルToothpick『iFlight TurboBee 120RS 4S』。標準で200mW出力VTXにフルレンジレシーバー、Caddx Turbo EOS2カメラ搭載と高スペックな機体ですね!  【URUAV UR85】最近お気に入りの85mm Whoop。新たな相棒URUAV UR85が仲間入り!
【URUAV UR85】最近お気に入りの85mm Whoop。新たな相棒URUAV UR85が仲間入り!  【Toothpick】はじめてのToothpick機『Happymodel Sailfly-X』を飛ばしてみた。スピード&パワーは全くWhoopとは別物!飛行時間は6分近くも飛んでくれます!
【Toothpick】はじめてのToothpick機『Happymodel Sailfly-X』を飛ばしてみた。スピード&パワーは全くWhoopとは別物!飛行時間は6分近くも飛んでくれます!


コメントを残す