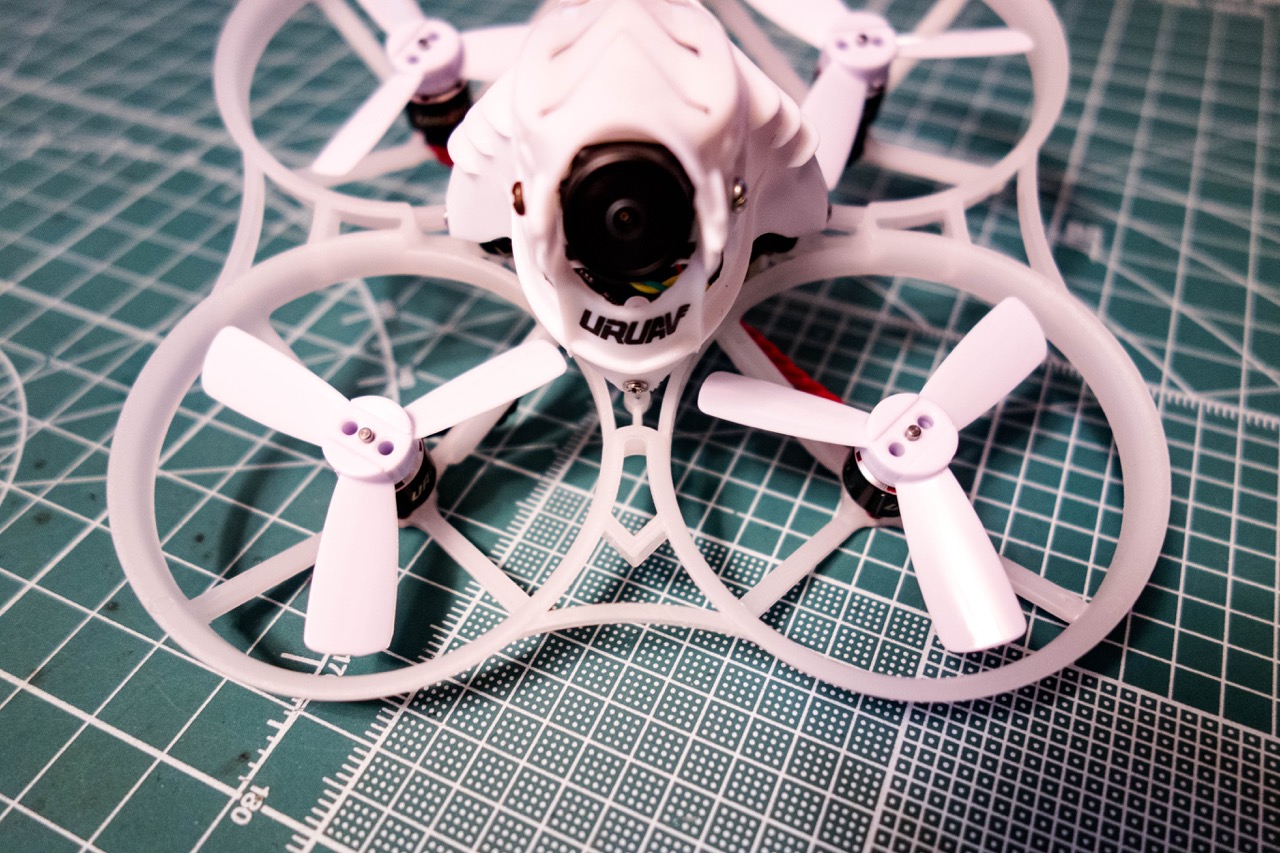
みんな大好き1セルブラシレスWhoop UR65。

0805モーター&85mmフレームにアップした『URUAV UR85』、やはりUR65の後継機だけあり非常に飛ばしやすく大変気に入っております!

85mmフレームサイズ機といえばBeta75Xを85mmフレームに載せ替えた75X改(Shutterbug85構成機)がProp Wash等の発生が抑えられ飛ばしやすく普段練習機として飛ばしていますが、この機体と比べても遜色なく非常に飛ばしやすくなっています。
この2機を飛ばし比べると飛びの種類?はかなり違ってきます!
75X改のズンッというモーターパワーで機体を制御している感覚に対し、このUR85はシュッという非常に軽い飛びが魅力的です!(感覚的でスイマセン)
はじめてMobula7を飛ばしたときの感覚に近いと思います。

梅雨の雨上がりの合間に少し広めの駐車場でようやく飛ばせたのですがUR65の時のような気持ちいい飛びっぷりを見せてくれます。
URシリーズの人気は非常に高く、UR65を飛ばされている方からステップアップにこのUR85の購入を検討している等いろいろ問い合わせを頂いたので、今回はUR85を野外で飛ばすために必須となってくるロスト防止のためブザーの取り付けを行い、また飛ばすための最低限の設定等をご紹介します。
目次
【URUAV UR85】ブザーの取り付け&最低限の初期設定!
UR85には、Caddx Turtle V2カメラを搭載したHDバージョンとCaddx Turbo EOS2カメラを搭載したノーマルバージョンのUR85があります。
今回紹介しているのはFPV練習機として飛ばせるノーマルバージョンのUR85となります。
HDバージョンの場合も使われているFCが同じなのでブザー取り付けに関しては基本同様の手順で問題ないかと思います。

ブザーの取り付け!
まずはブザーの取り付けを行っていきます。
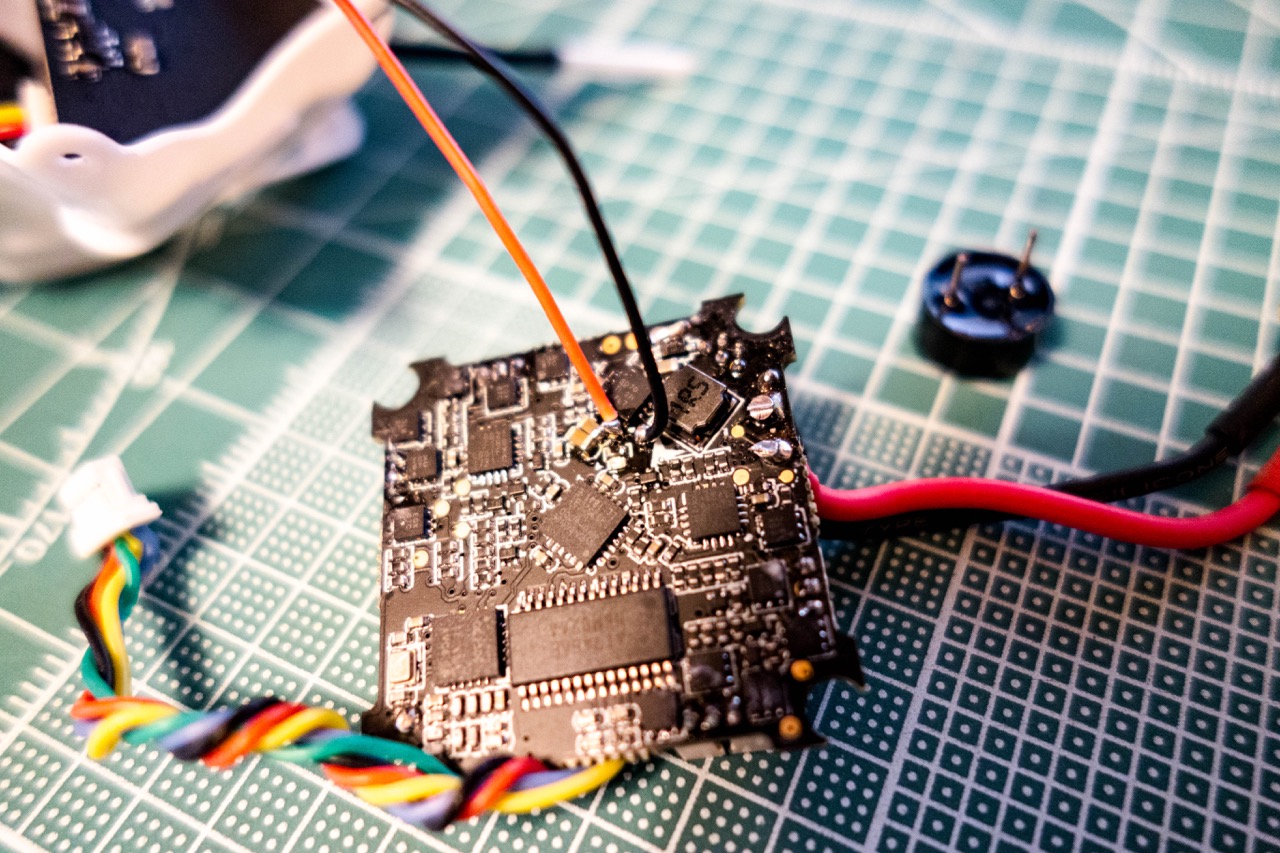
機体を解体しFCを取り出します。


付属のマニュアルを参考にブザーポートの位置を確認して下さい。
相変わらずブザーポートが小さくピッチも狭い!
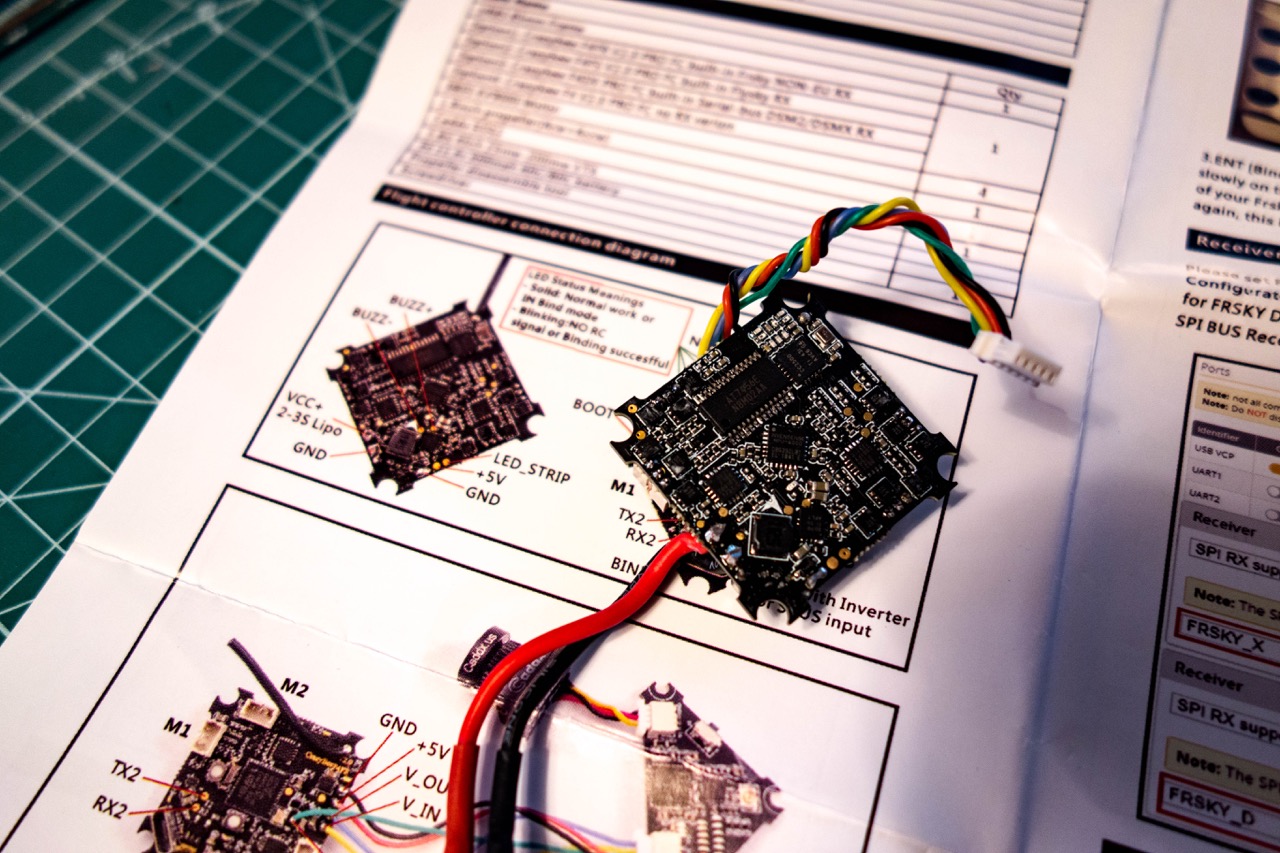
UR65のブザー取り付けもそうでしたが、はんだ作業の難易度は少し高くなります!
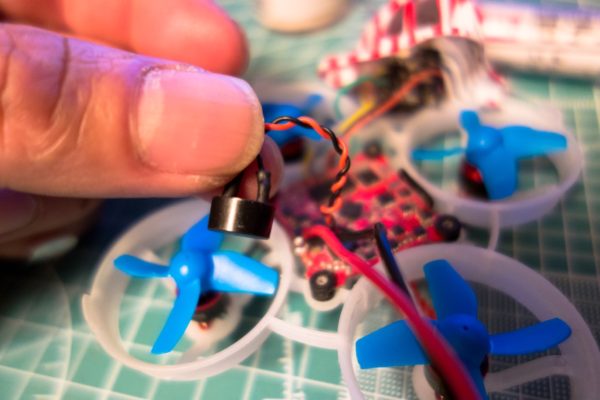
この手のFCでのブザー取り付けは、少し細めのAWG30シリコンケーブルが最適です!
これ以上の太さがあるケーブルではかなりはんだ付けが難しくなるかと思います。
こんな感じで綺麗にはんだ付けできました。
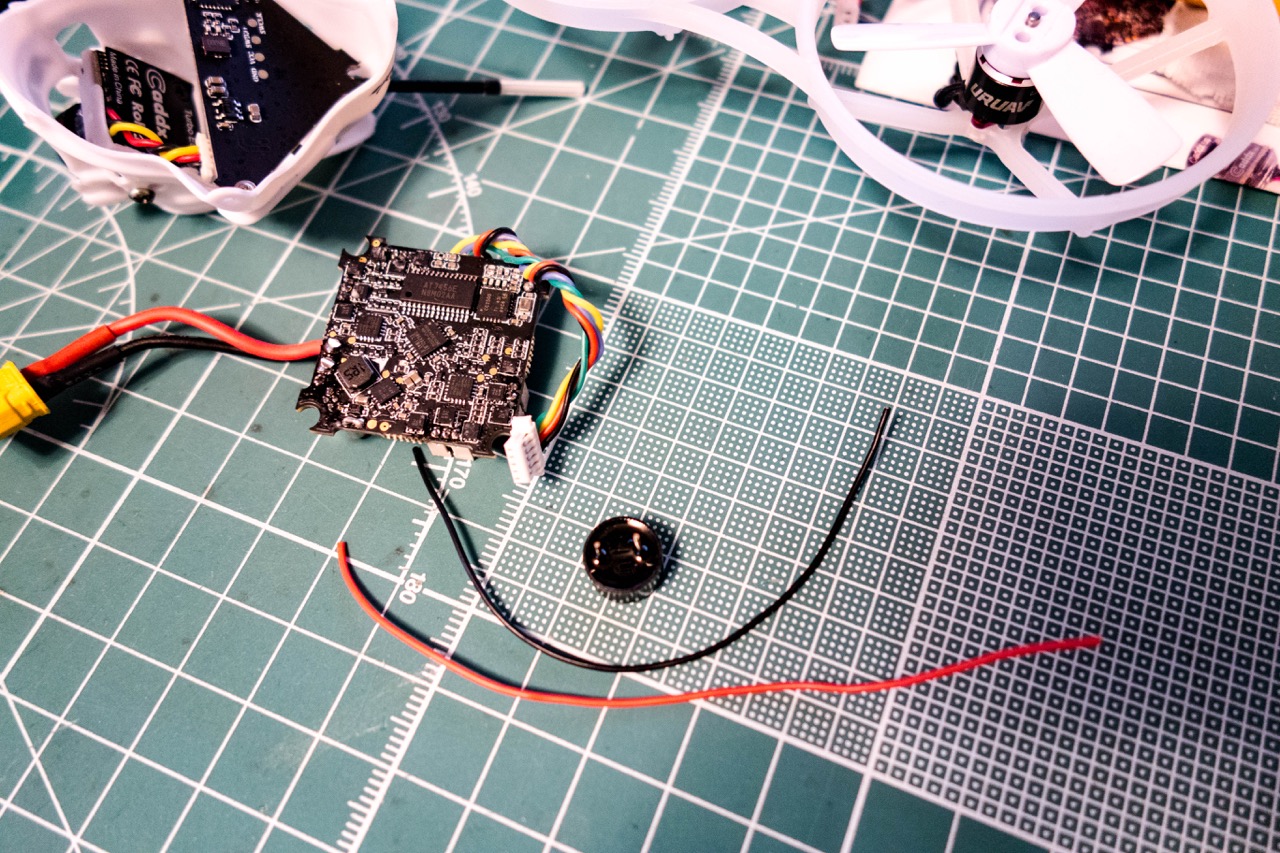
次はブザーの取り付けをしますがブザーには極性があるので注意して下さい!
そしてケーブルは少し長めにとっておきました。
これはブザーをキャノピー内後部に収めたかったのと、あとメンテナンス等でキャノピーを外す際に少し長めにケーブルがあった方がやりやすいためです!

キャノピー内のVTXを一旦取り外しキャノピー後部にある突起部分にブザーを引っ掛けて再度VTXを固定すればうまく固定できます。
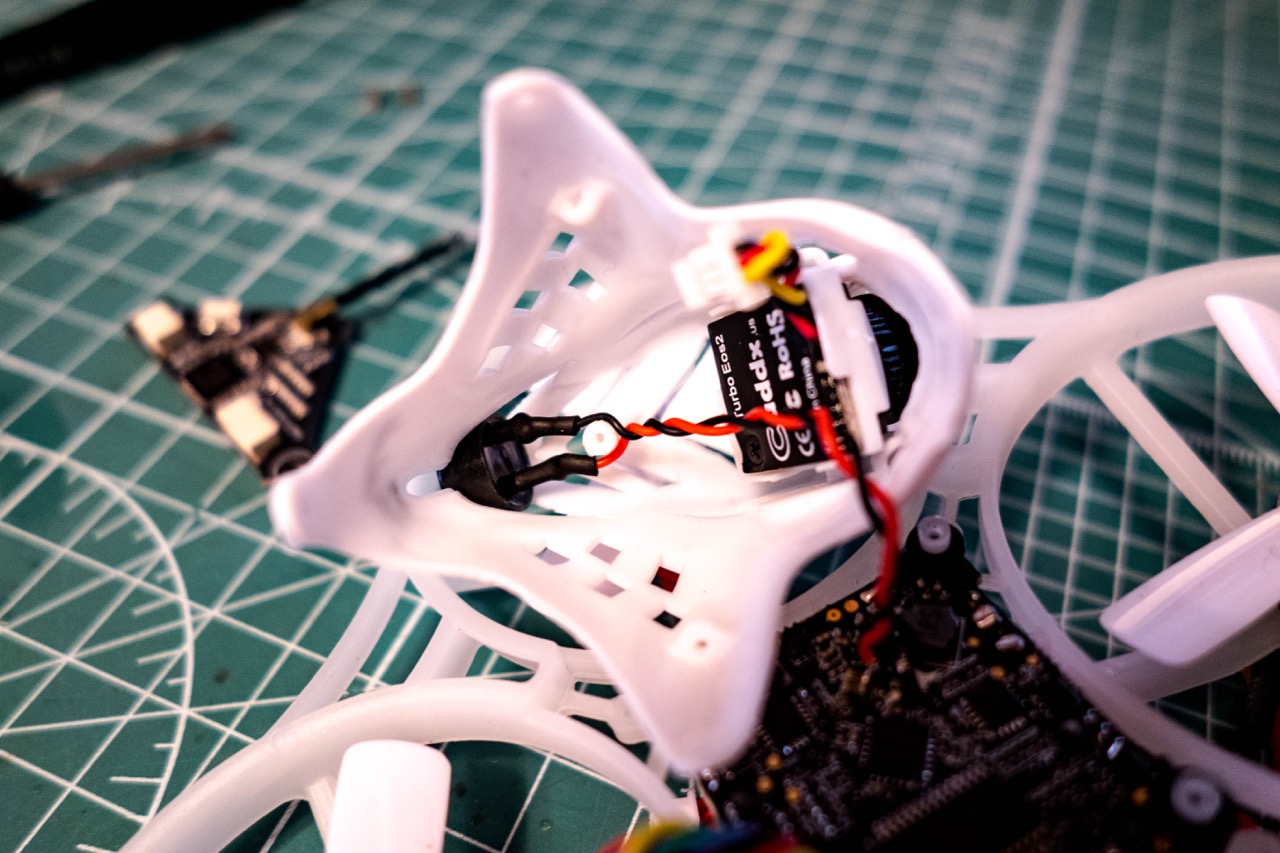
これでブザーの設置は完了です!
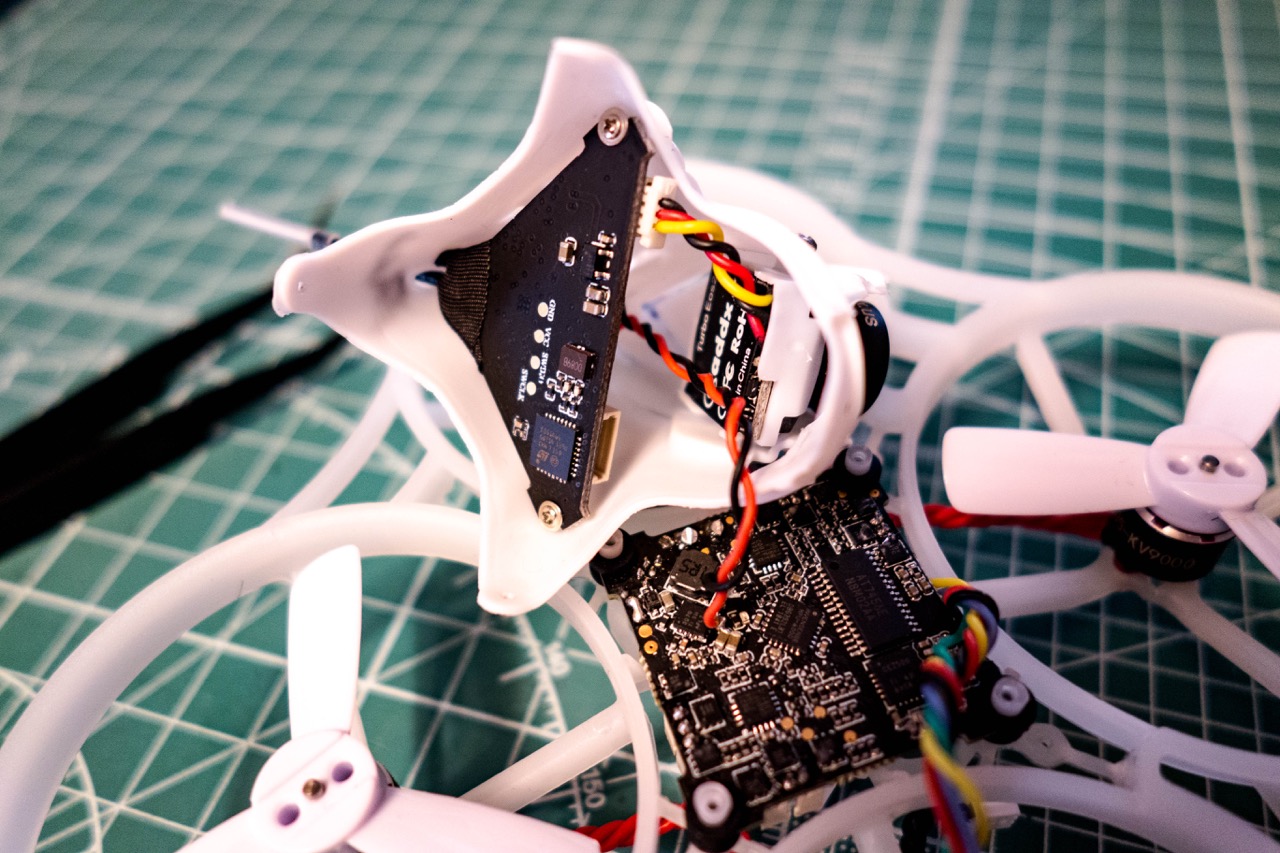
いい感じに固定&設置ができました!
Betaflight設定 & バインド!
次にBetafilghtの設定に移ります。
飛ばせるまでの最低限の設定に限定したいと思います。
PIDやRate等々はお好みで変更して下さい!
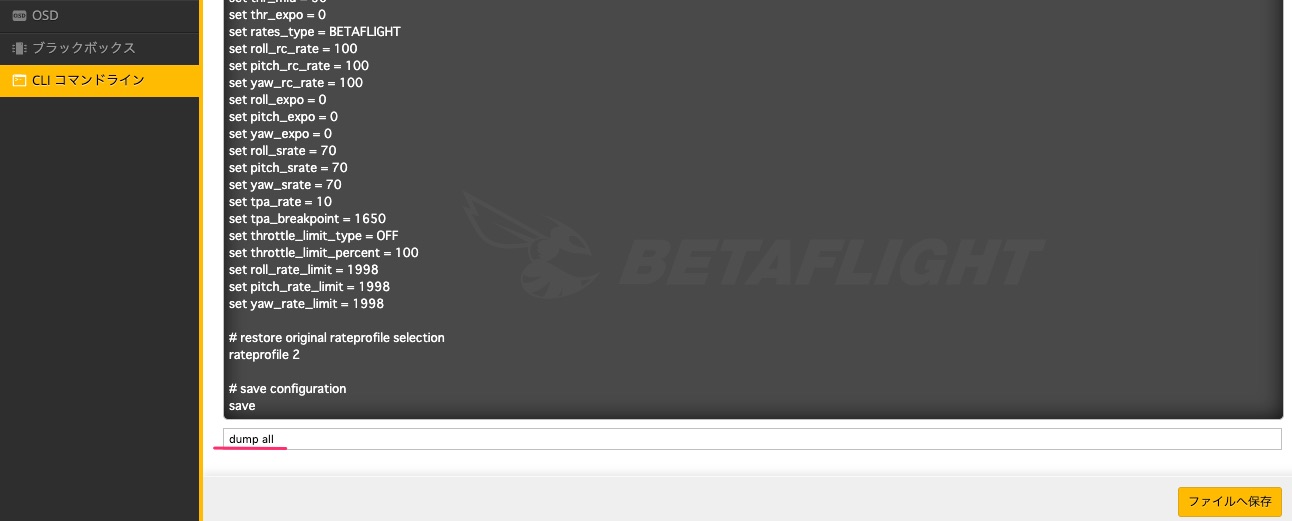
デフォルトの設定値を保存!
まずはデフォルト状態の設定を保存しておきます。
[CLIコマンドライン]タブからdump allと入力しファイルを保存しておきます。
ポート設定!
ポート設定はデフォルト状態で特に問題なさそうですね。
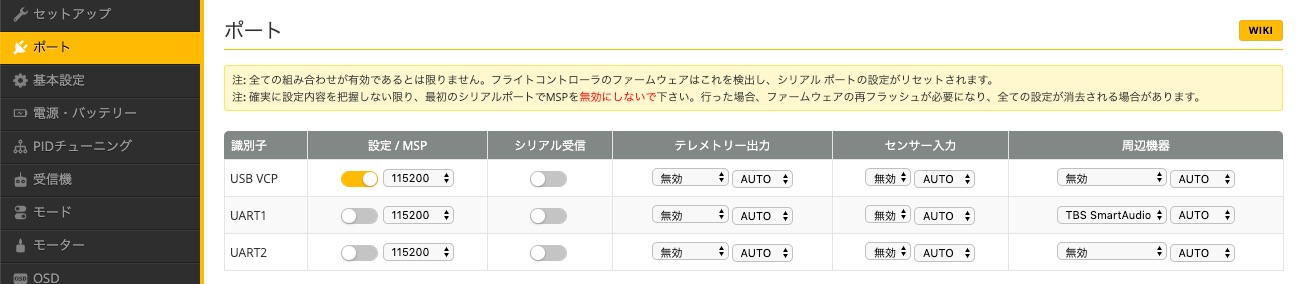
UART1にSmart Audioが割り当てられているので、外部受信機(Frsky xm+)増設の際はFCのSmart Audio端子をTX2ポート(現在TX1)への接続変更&UART2に入れ替えが必要になってきます。
基本設定!
デフォルトでは[モーター回転方向を逆転]設定されていないので逆転設定に変更しました。
また、MOTOR_STOP(アーム後にモーターを回転させない)をOFF設定に変更。
モーターアイドルスロットル値をデフォルト4.0から6.50に変更。
これはお好みで!
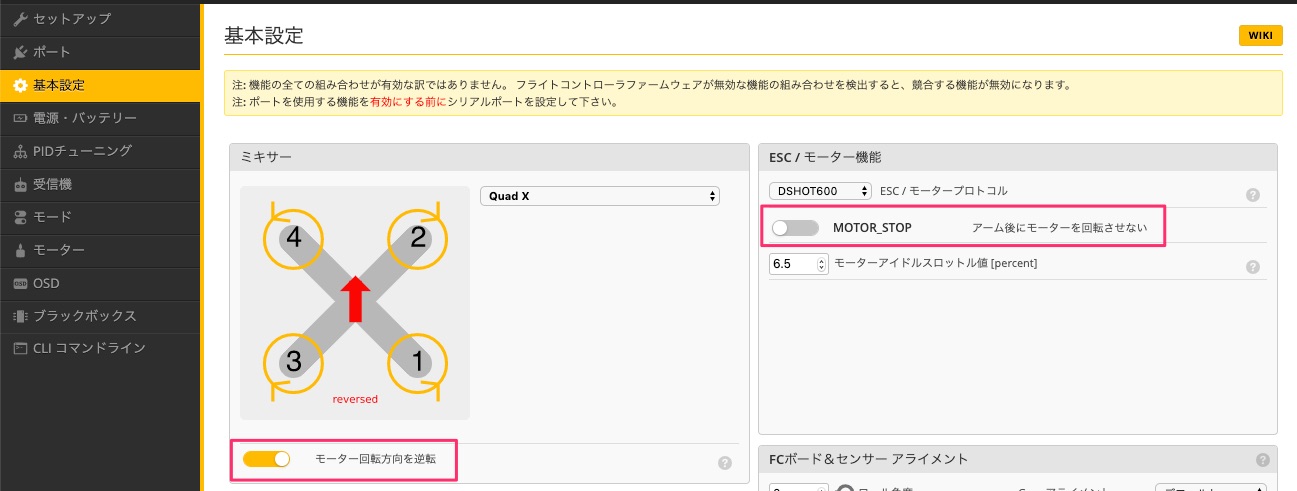
FPVカメラアングルを35度に設定。
受信機を[FRSKY_X(D16モード)]に変更。

テレメトリー出力をONに変更。
LED_STRIPは使用しないのでOFFに変更。
[エアーモードを常時使用」をONに変更。
こちらはお好みで!
その他はデフォルトで問題ないかと思います。

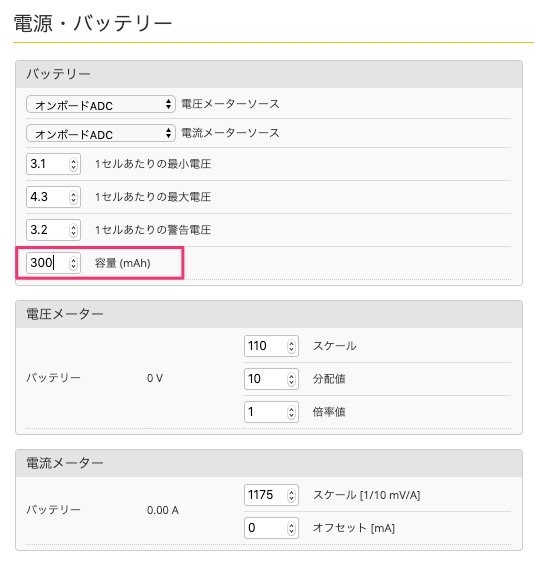
電源・バッテリー!
バッテリー容量を300mAhとしました。
電圧設定は今後飛ばしながら微調整していきたいと思いますが特にデフォルト値で問題なさそうですね。
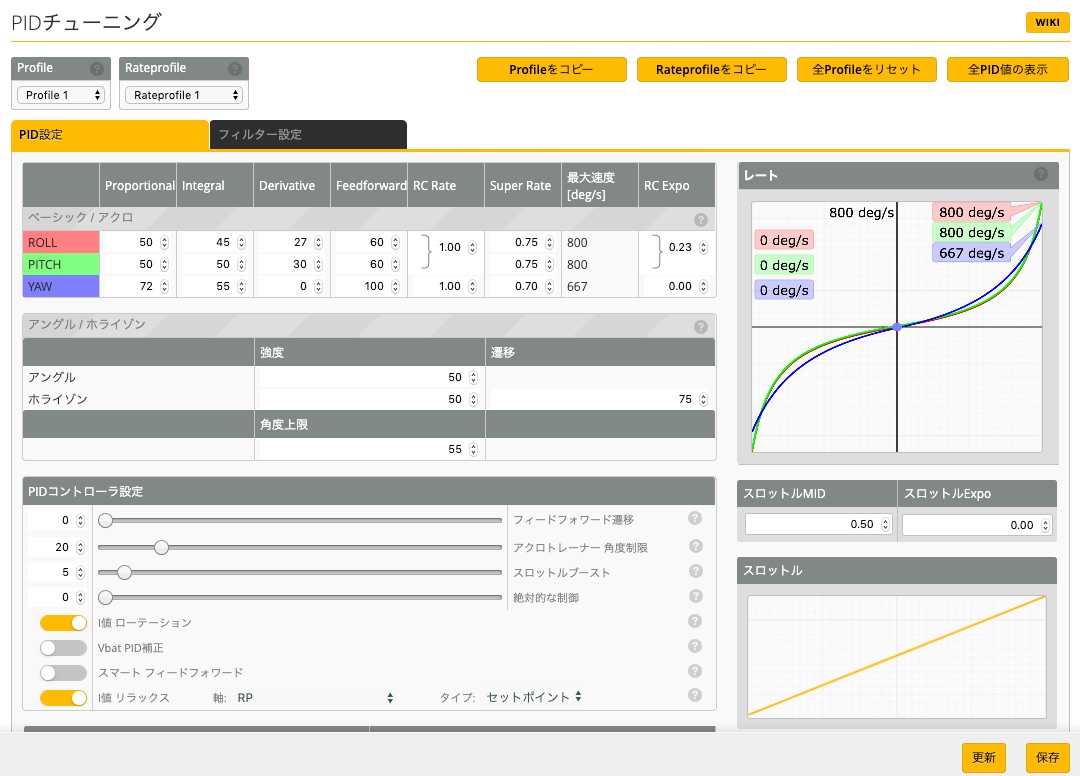
PIDチューニング!
PIDやRate設定はお好みで!
機体とのバインド!
ここまで設定できたら一度機体と送信機をバインドしておきましょう。
USB接続のみでバインド作業はできます。
FC上のBINDボタンを押しバインドモード(LEDが点滅から点灯に変わる)に入り送信機とバインドします。
通常作業なので問題ないですね!

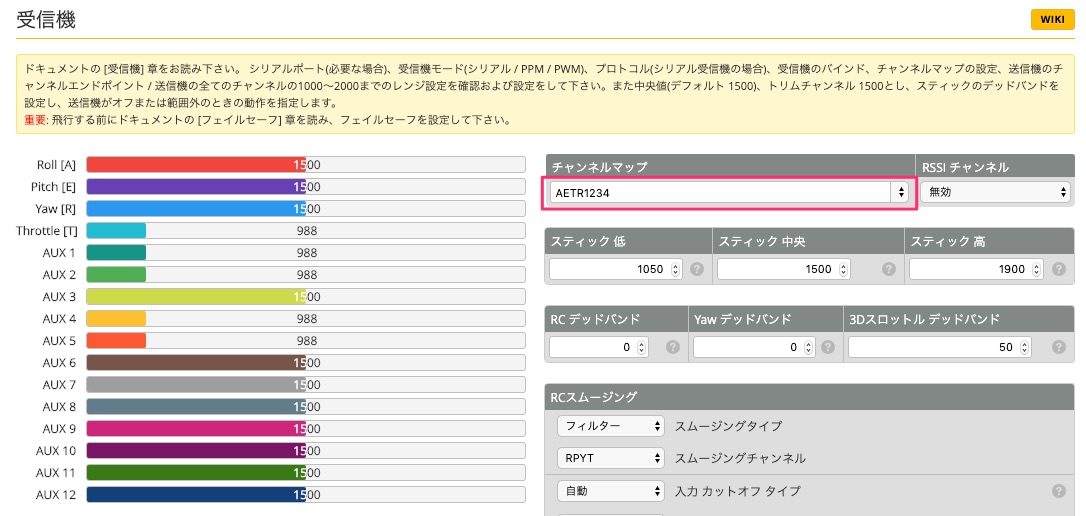
受信機!
送信機とのバインドが完了したら次に[受信機]タブへと移ります。
チャンネルマップを[AETR1234]に変更。
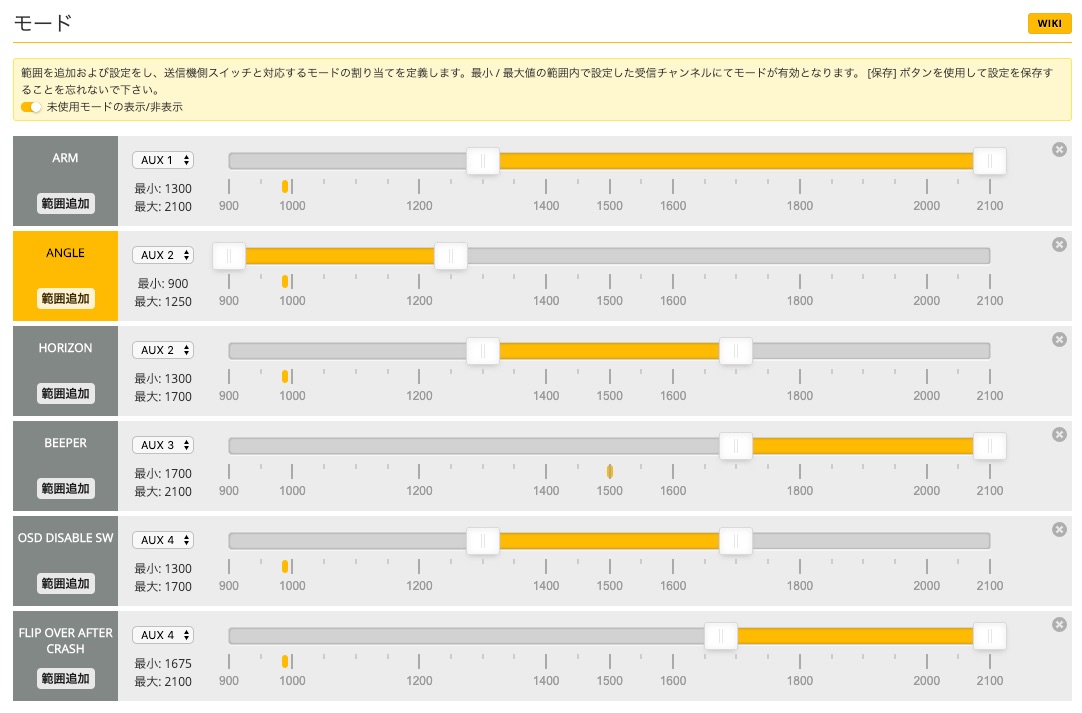
モード!
デフォルトで設定されているのはこの3項目のみです。
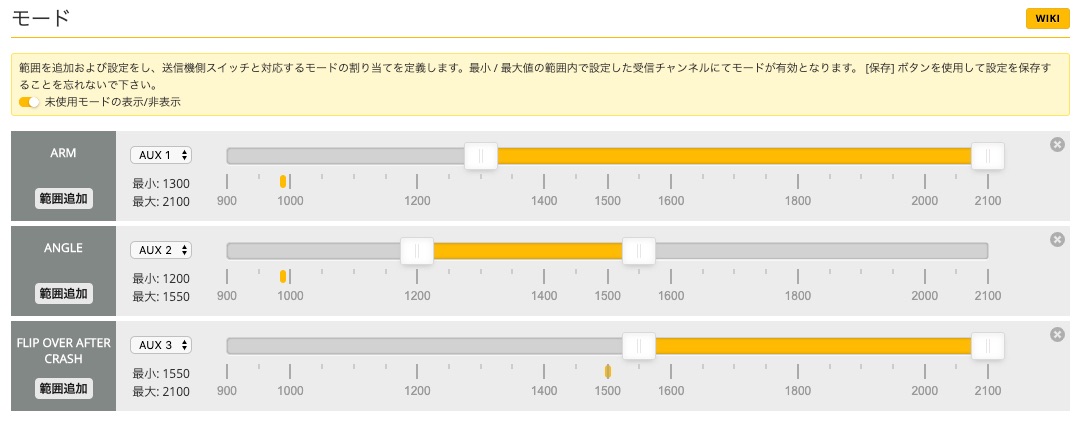
最低限の設定(フライトモード・ブザー等)を追加しておきます。
OSD!
こちらはお好みで設定して下さい。
ビデオ形式はAUTOからNTSCに変更しました。
いつも私はこんな感じで設定しています。

このUR85は3セルバッテリーまで対応しているので、飛ばしている最中に「今、何セルバッテリーだっけ?」とならないよう(私だけかな?)全体のバッテリー電圧も表示させています。
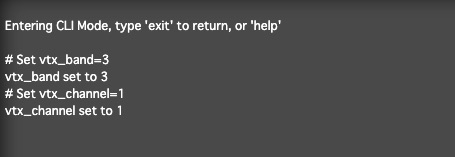
VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきましょう。
VTXのボタンを押して設定してもいいのですが、せっかくなのでBetaflightの[CLIコマンドライン]から設定しておきます。
Set vtx_channel=1
Set vtx_freq=5705
save
設定データの保存!
ここまで来ればBetaflightでの最低限の設定は完了です!
これまでの設定内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップを取って完了です。
BLHELIでモーター回転方向を逆転設定!
上記Betaflightでの設定で、[モーター回転方向を逆転設定]に設定したのでモーターの回転をBLHELIでReversed設定する必要があります。
物理的にモーターを取り外し全て入れ替えてもいいのですが面倒なのでこちらで設定しています。
全てのESCにReversed設定をし[Write Setup]で書き込んで完了です!
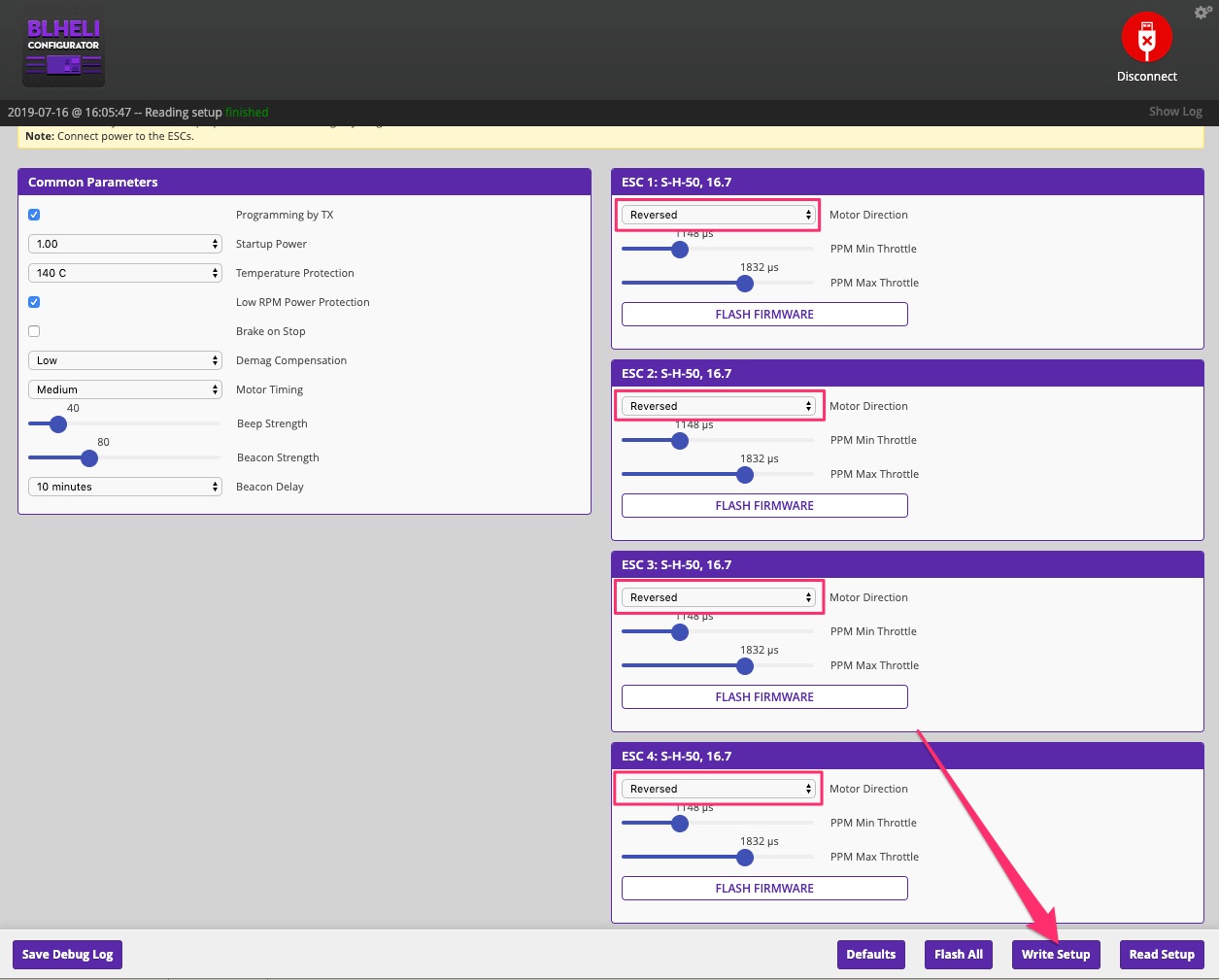
上記Reversed設定が完了したらペラを取り外し入れ替えするのもお忘れなく!
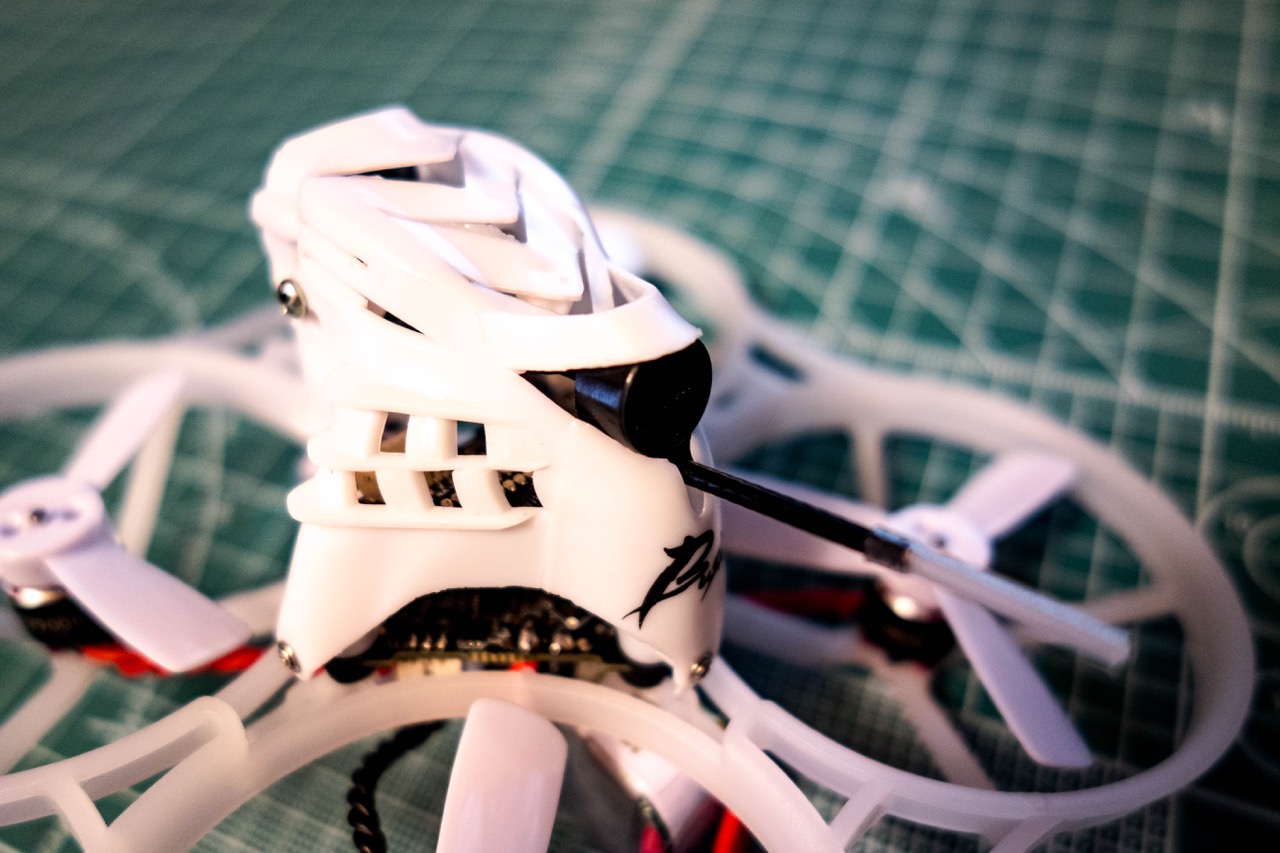
こんな感じでUR85を最低限飛ばせる状態に設定できました。
あとはご自分の好みやスキル等で設定していけばいいと思います。
さすがUR65の後継機だけあり非常に飛ばしやすくいい飛びっぷりを見せてくれます。
動画をアップしたかったのですが会社の駐車場で飛ばしていたため同僚たちが映ってしまい今回は断念!
また次回動画もアップできればと思います。

当初自分の中で予定していた85mm Whoopの飛びの違いが体感でき大満足です!
11系のモーターに変更した時の飛びの違いや、また12A ESCでは・・・などなど、いろいろ試してみたいことが山積みです!
やっぱりいい機体ですね、URくんって!


 【URUAV UR85】85mmサイズのWhoop練習機としてUR85(ノーマルバージョン)の構成を考えてみる!
【URUAV UR85】85mmサイズのWhoop練習機としてUR85(ノーマルバージョン)の構成を考えてみる!  【Tiny Whoop】Whoopくん1台焼けました!ホントは危険なリポバッテリー、管理の重要性を再認識!
【Tiny Whoop】Whoopくん1台焼けました!ホントは危険なリポバッテリー、管理の重要性を再認識!  【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!
【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!  【BETAFPV】大破したBeta85X HDを練習機としてノーマル85Xに作り変え!
【BETAFPV】大破したBeta85X HDを練習機としてノーマル85Xに作り変え!  Beta75X(85mmフレーム)構成機、これまであったトラブルいろいろ!【Shutterbug85】
Beta75X(85mmフレーム)構成機、これまであったトラブルいろいろ!【Shutterbug85】  【Tiny Whoop】目的を設定するとWhoopの練習がより楽しく!今回はShutterbug85構成機についていろいろやってみたという話。
【Tiny Whoop】目的を設定するとWhoopの練習がより楽しく!今回はShutterbug85構成機についていろいろやってみたという話。  【Tiny Whoop】トリック飛行の練習をはじめてみたんだけど・・・毎回機体の損傷が激しくて大変です!
【Tiny Whoop】トリック飛行の練習をはじめてみたんだけど・・・毎回機体の損傷が激しくて大変です!  【BETAFPV】Beta75Xを85mmフレームにサイズアップ!
【BETAFPV】Beta75Xを85mmフレームにサイズアップ!


コメントを残す