
Happymodel Mobula7とともに人気の2セルWhoop『Eachine TRASHCAN』ですが、今回このTRASHCANに外部受信機(Frsky xm+)を増設してみました。

Mobula7の場合個体差もあると思うのですが50mほど離れるとRSSIが40以下にまで下がり数回ノーコン状態となり墜落なんてことになったので、先日Mobula7にも同じく外部受信機を増設しました。

2セル機となると基本野外で飛ばすと思いますが、内蔵受信機では受信距離的に少し心もとないので今回TRASHCANにも外部受信機を増設してみることに。
TRASHCANの場合、Mobula7とは対照的で内蔵受信機でも野外では比較的遠くまで飛ばせたのですが、室内など送信機との距離が近すぎると接続が切れることが多々ありました。
このあたりもFC内臓の受信機の個体差だと思います。(F4 FCの特性なのか?)
今回TRASHCANに使われているEachine Crazybee F4 PRO Flight Controllerに外部受信機(Frsky xm+)を増設する作業ですが、電源の取り回しとSBUSにInverter(反転)入力という聞き慣れない用語が出てきて少し手間取りました。
Eachine TRASHCANに外部受信機(Frsky xm+)を増設!
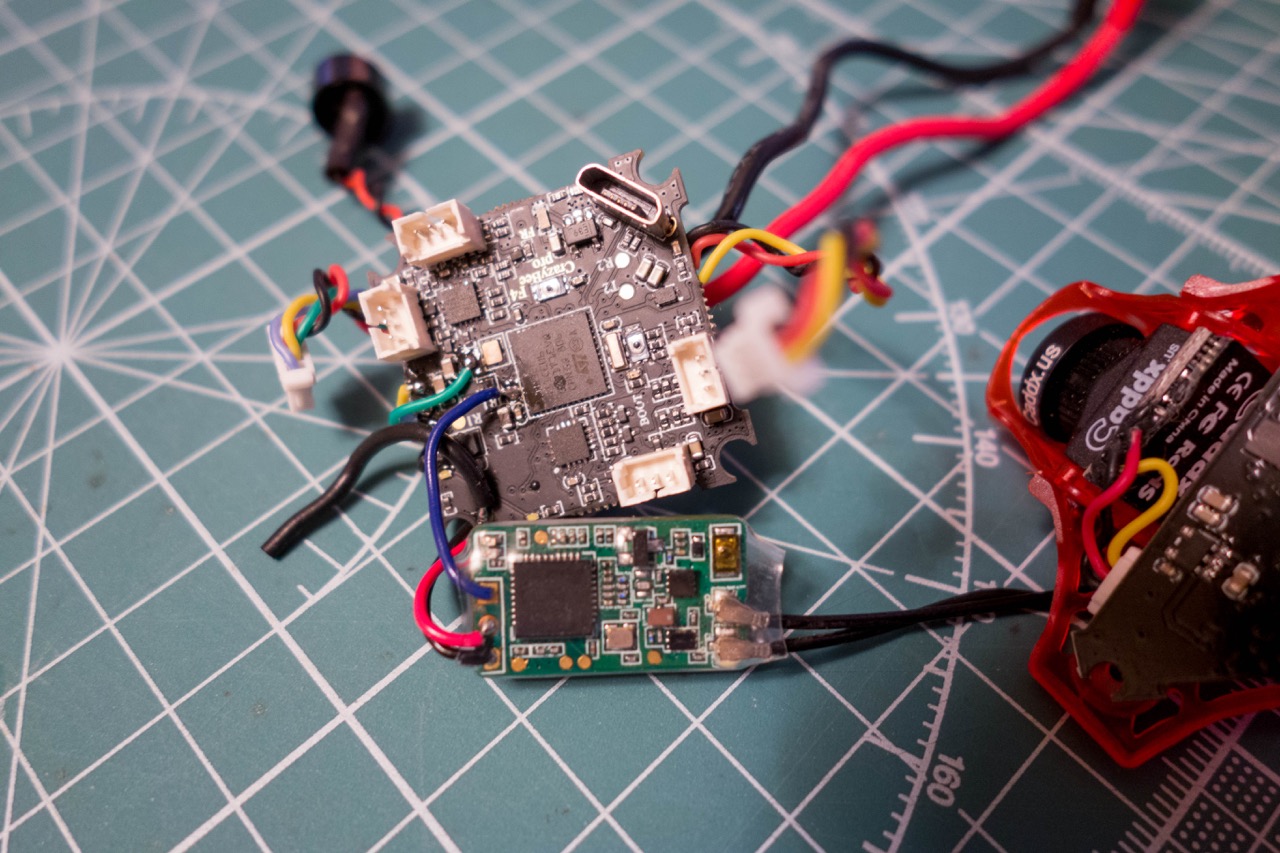
サクッとバラしていきFCに接続するポートを確認していきましょう!
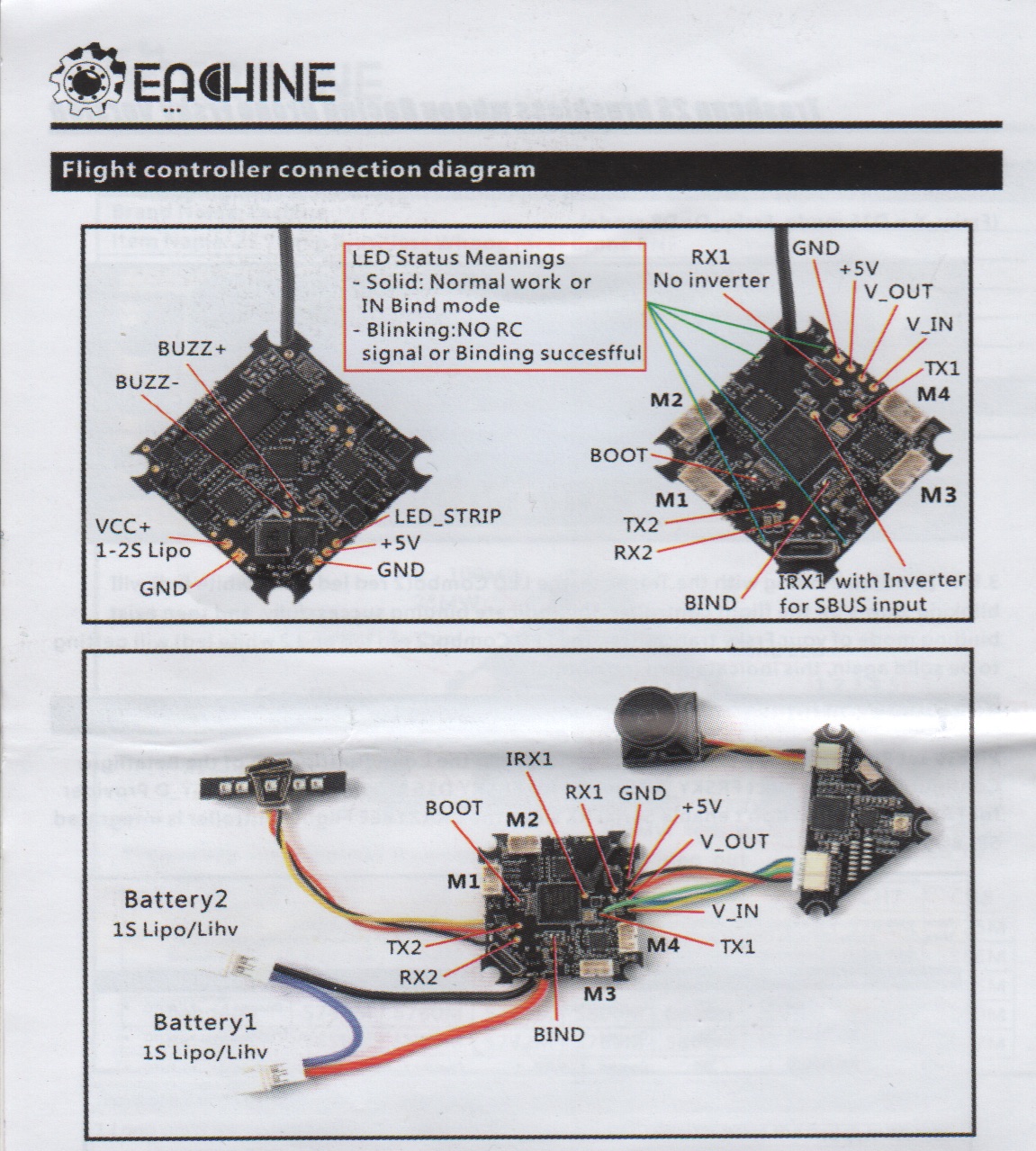
こちらがTRASHCANのマニュアルとなります。
TX(出力)やRX(入力)が外部機器を接続するポートですが、TRASHCANで使われているEachine Crazybee F4 PRO Flight ControllerにはTX1、TX2、RX1、RX2と入出力2系統があります。
Racerstar Crazybee F3 Pro Flight ControllerのMobula7ではこれが1系統だけでした。
またFC上のTXやRXポートに関しては以下参考にしてみて下さい!
そして外部受信機を接続するのですが、xm+受信機のSBUS信号をFCへと入力したいのでRX1ポートでいいのかと思っていたのですが、マニュアルに”RX1 with Inverter for SBUS input”という聞き慣れないポートが!
SBUS inputと入力の指定があるのでRX1ポートではなくこのポートに接続しろということなんでしょうが、”Inverter(反転)”とはどういうことぞやと!?
いろいろ調べてみましたがなかなか情報が出てこず、唯一moccaさんが同様の作業をやられていてこちらのポートで問題ないようなのでこちらにSBUS接続することに。
参考 Eachine TRASHCAN & Mobula7に外部受信機を増設しました!晴れときどき仮想通貨次に電源の確保ですが、TRASHCANにはデフォルトでLED_STRIPが設置されています。
また前回、野外ロスト防止の為にブザーの設置をしており空いていたVcc(BUZZ+)ポートを使っています。
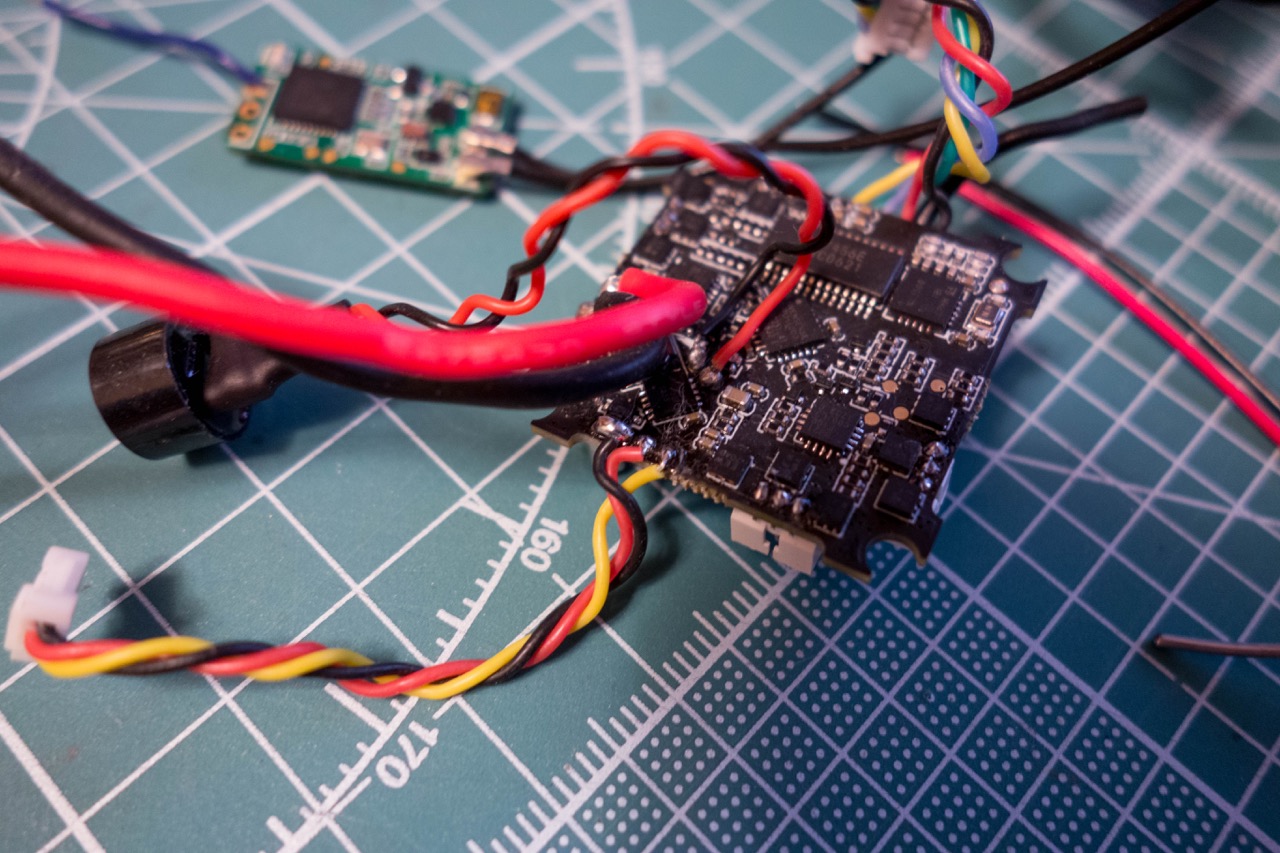
FC上にある使えそうなVcc(+5V)ポートといえば、VTXに接続されている+5V端子とLED_STRIPに使っている+5V端子、あとBUZZ+端子となりますが、電圧の変動が少なそうなLED_STRIPの+5V端子から取ることに。
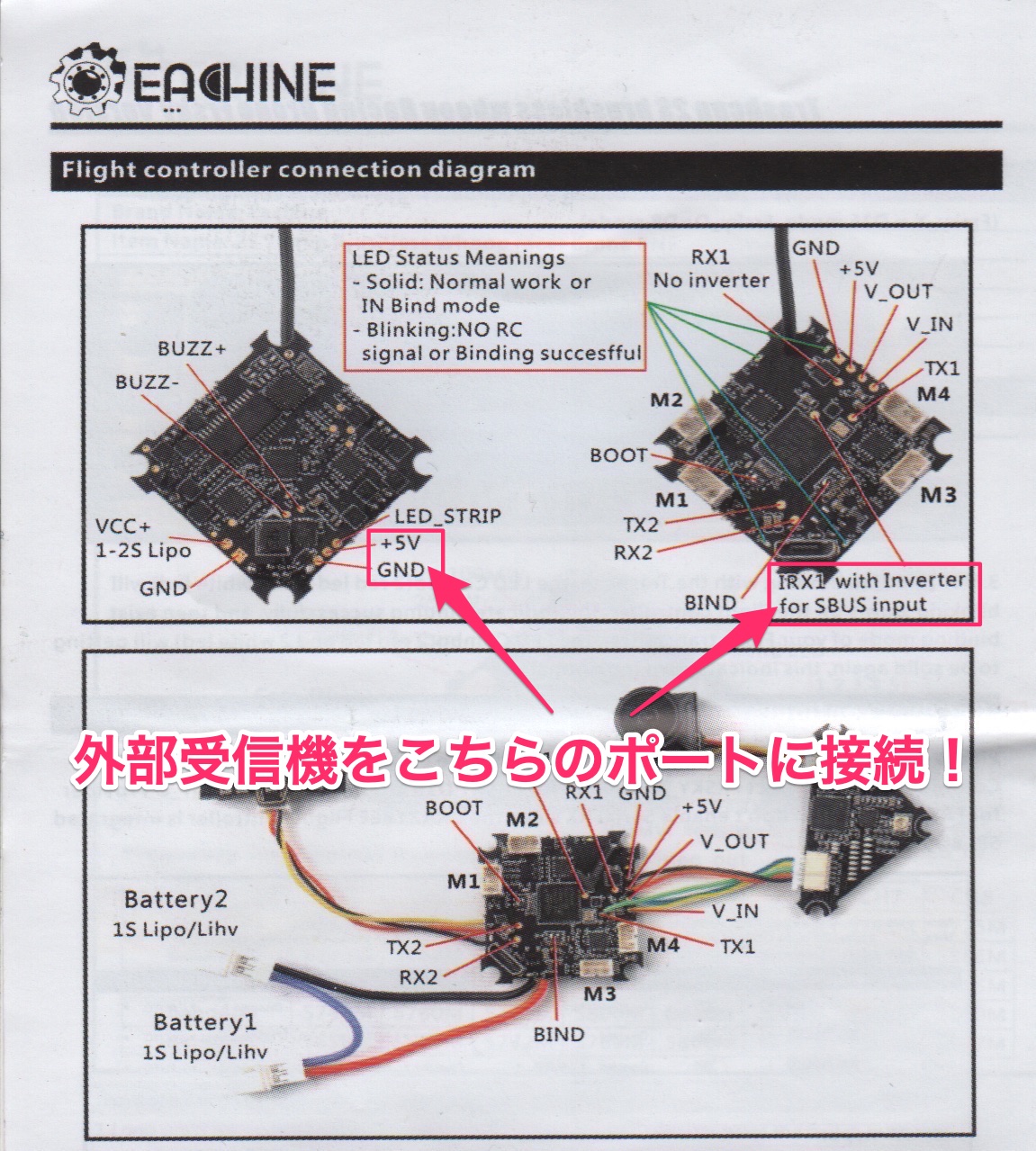
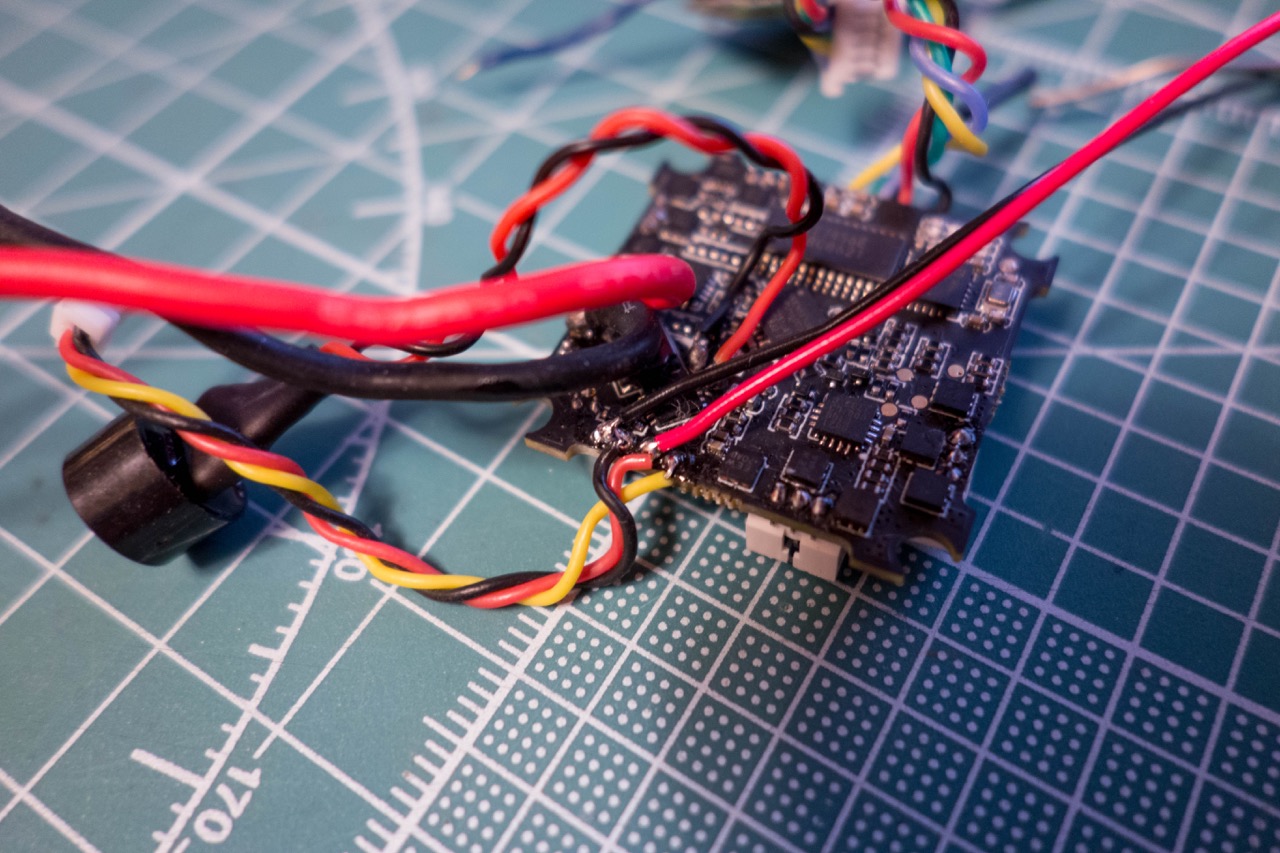
まずはVcc(+5V)とGNDをLED_STRIPから確保(赤と黒ケーブル)。
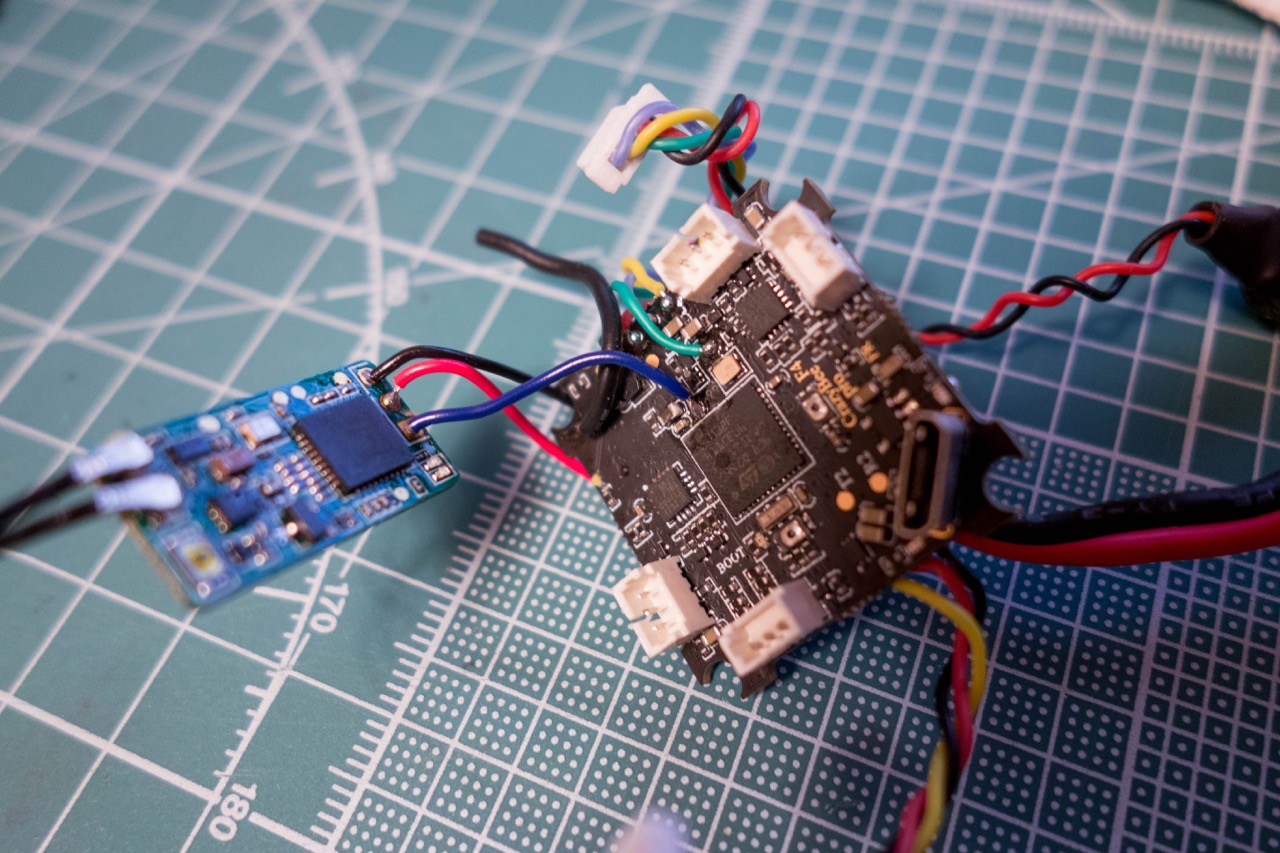
次にSBUS信号の入力は、マニュアルにある”RX1 with Inverter for SBUS input”というポートに接続(青ケーブル)。
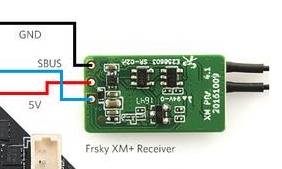
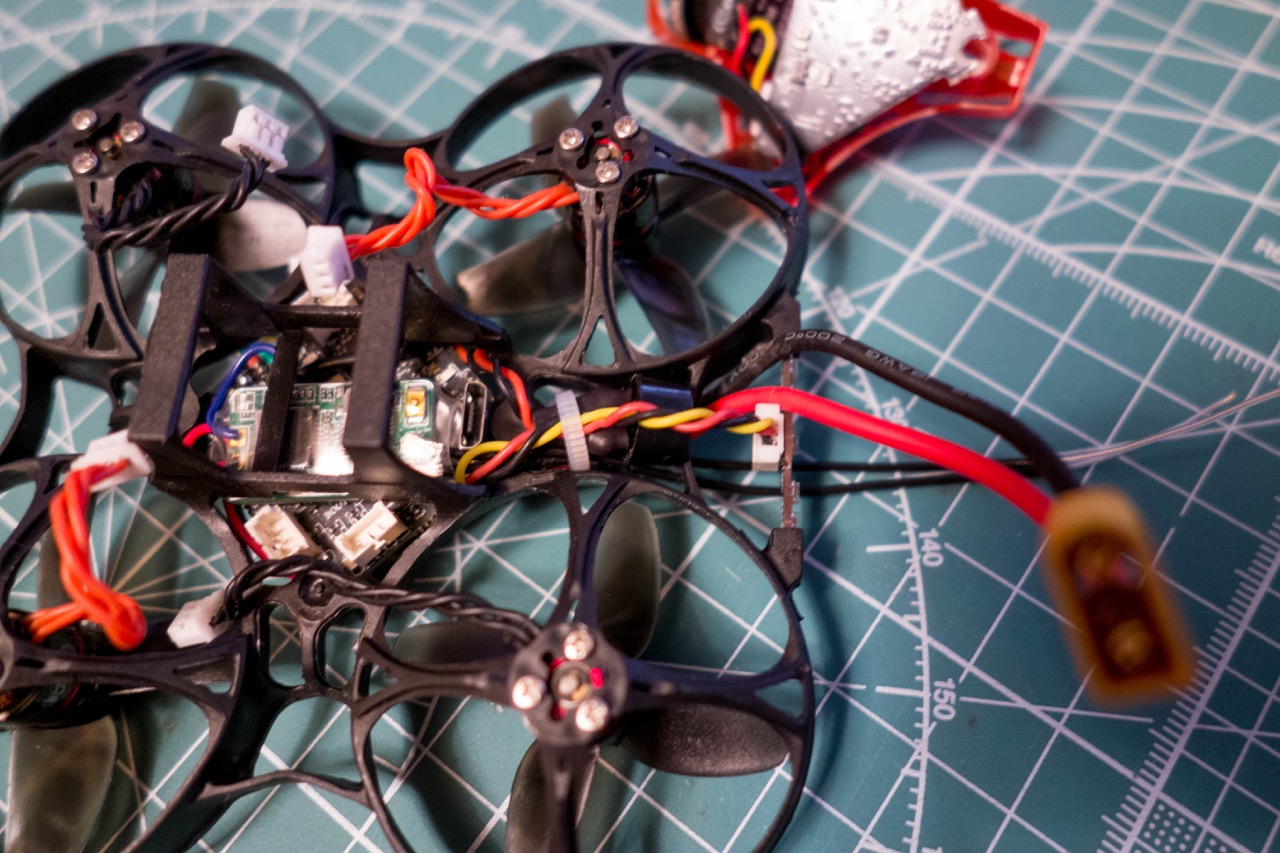
受信機の配線はこちらの図を参考にしてください!
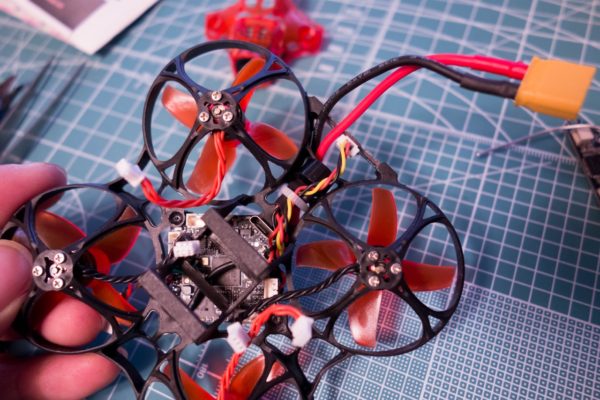
あとは受信機にヒートシュリンクチューブを付け絶縁処理して完了です。

外部受信機とLED_STRIPの電源を共通して取る形となりますが、はたしてこのような電源の取り回しって実際どうなのか?
moccaさんのブログではブザーが一体となったLED_STRIPボードを使われているようです。
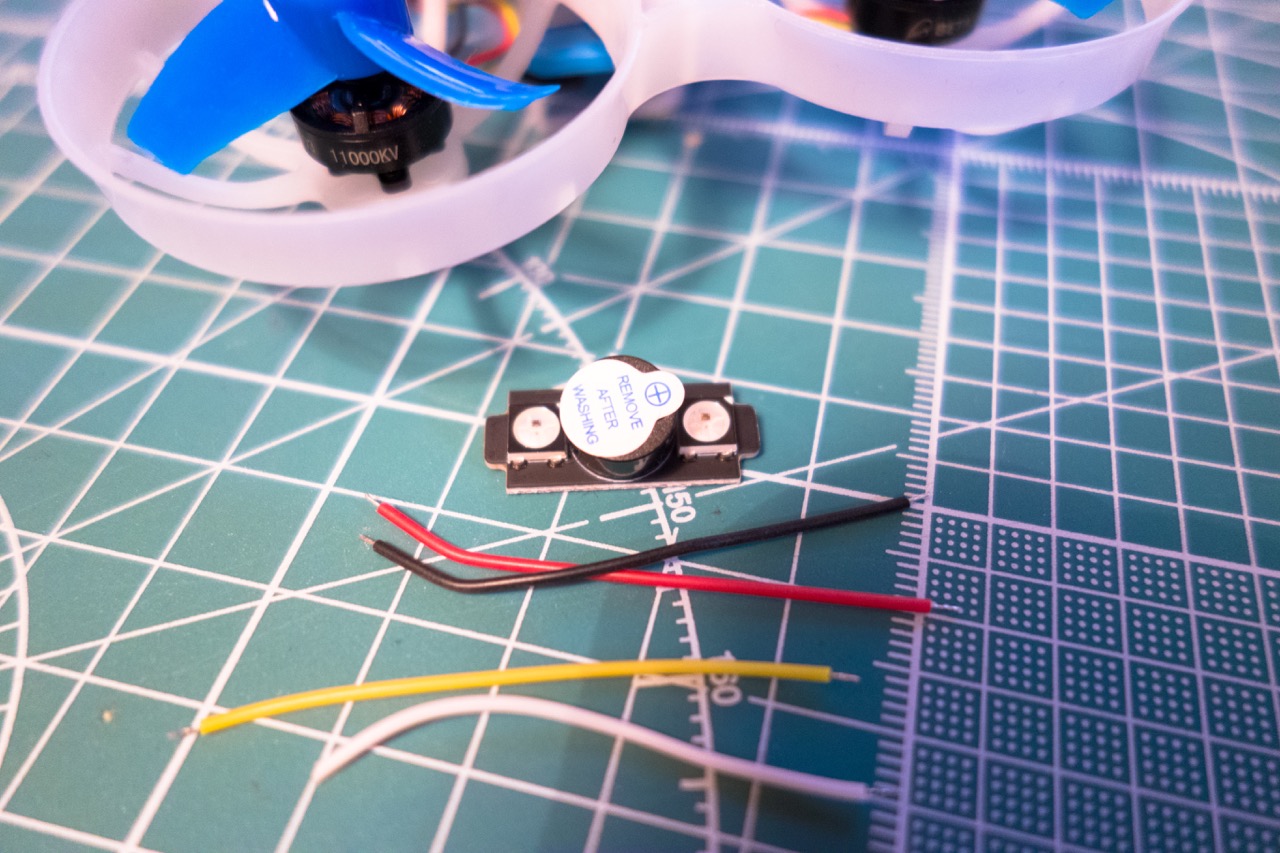
私も手元にこのブザー一体型のボードを持っていたのですが、今回テストもかねこのような電源のとり方をしてみました。
LED_STRIPに関しては私は特に必要としていないので取り外しても良かったのですが!
野外でテスト飛行してきましたが特に問題はないようでしたが、今後何かあるようならまたこちらでご報告したいと思います。

Betaflightでの設定!
外部受信機(Frsky xm+)の接続が完了したらBetaflightでの設定を行います。
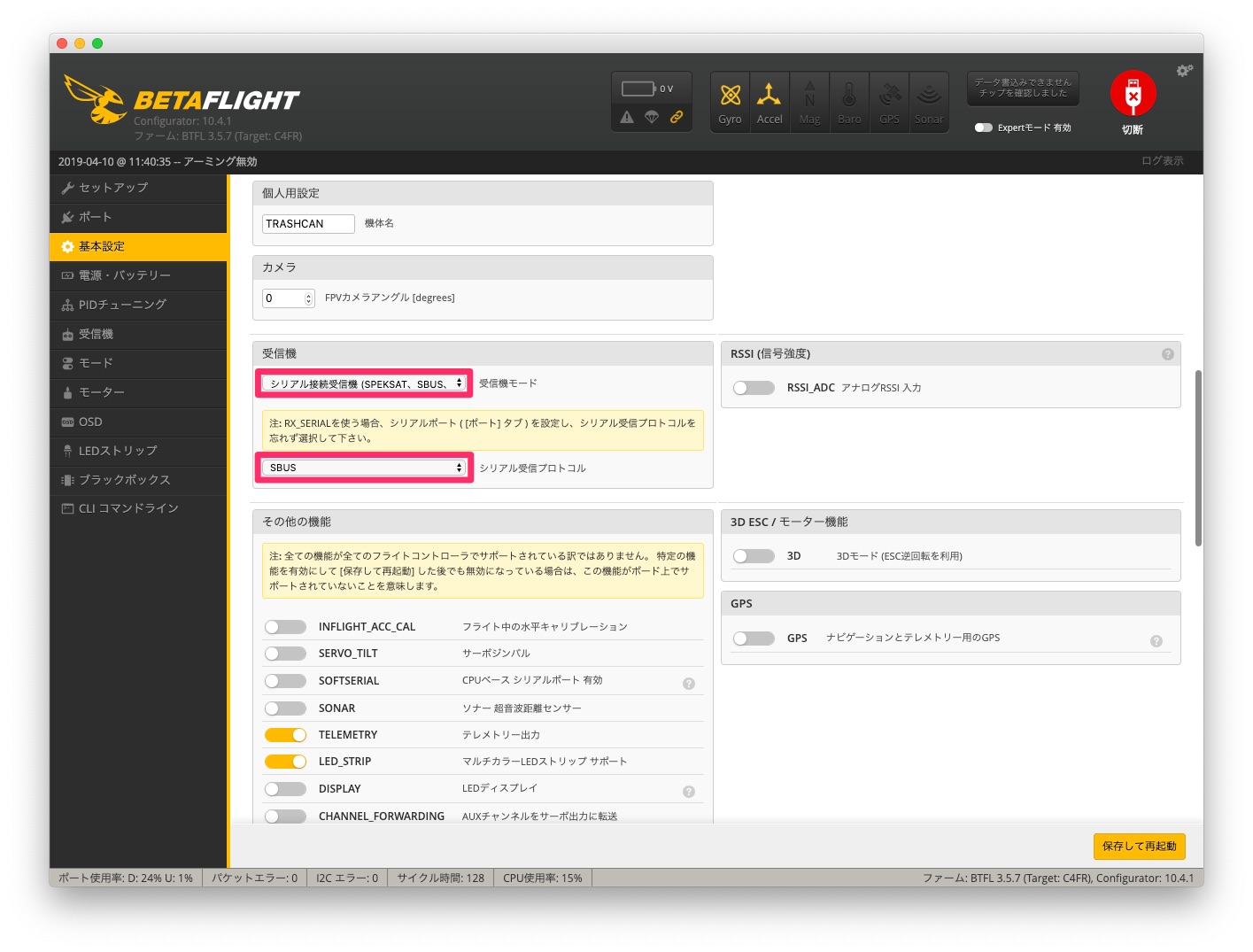
【ポート】からUART1のシリアル受信をオンに設定します。
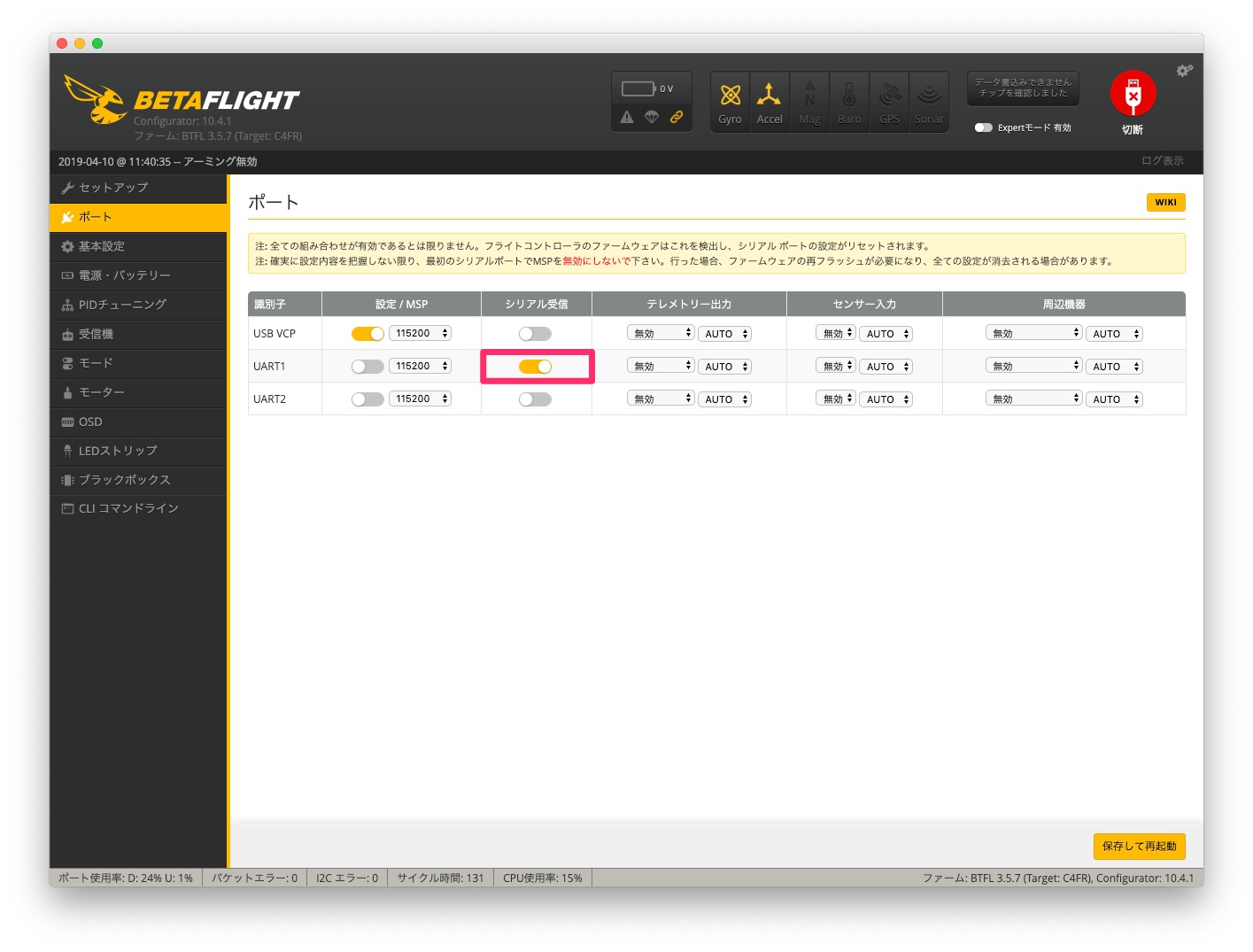
次に【基本設定】から、受信機モードをシリアル接続受信機、シリアル受信プロトコルにSBUSを選択。
Betaflightの設定が完了したら受信機のBINDボタンを押しながらバッテリーを接続し、送信機と接続して完了です。
最後に!
TRASHCANには標準で200mW出力のVTXが搭載され、今回外部受信機(Frsky xm+)を増設したことにより野外でも安心して飛ばす事ができるようになりました。

同様に外部受信機を増設したMobula7と飛ばし比べてみましたが、Mobula7に搭載されている25mW出力のAIOカメラでは先に映像が途切れてしまいました。
今回TRASHCANに外部受信機を増設してみましたが、障害物があまりないところで飛ばすには内蔵受信機でも特に問題ないと思います。
しかし私が普段飛ばしているこのような場所では、接続が切れたり映像が途切れたりすることが多々あり、外部受信機と200mW出力のVTXという組み合わせが一番安定して飛ばせるようですね。

Eachine TRASHCAN 75mm Crazybee F4 PRO OSD 2S Whoop FPV Racing Drone

Frsky XM+ Micro D16 SBUS Full Range Mini Receiver Up to 16CH for RC FPV Racing Drone

 【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。
【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。  【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!
【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!  【Eachine TRASHCAN カスタマイズ】1103モーターに変更!標準の0803モーターの発熱が改善され飛行時間も延びるようです!
【Eachine TRASHCAN カスタマイズ】1103モーターに変更!標準の0803モーターの発熱が改善され飛行時間も延びるようです! 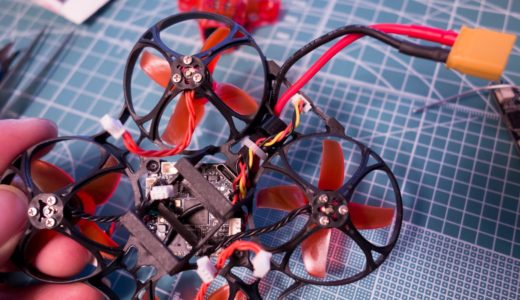 【TRASHCAN】野外ロスト防止にブザーを取り付け&2Sバッテリー運用のためピッグテールをXT30プラグに交換!
【TRASHCAN】野外ロスト防止にブザーを取り付け&2Sバッテリー運用のためピッグテールをXT30プラグに交換!  【TRASHCAN】人気2S Whoop『Eachine TRASHCAN』 。標準で200mW出力VTXやCaddx EOS2カメラ、LEDストリップ搭載と気になる構成!
【TRASHCAN】人気2S Whoop『Eachine TRASHCAN』 。標準で200mW出力VTXやCaddx EOS2カメラ、LEDストリップ搭載と気になる構成!  【Eachine Cinecan】バインドから飛ばせる状態にするまでの最低限のBetaflight設定&ロスト防止にブザーの取り付けをやってみました!
【Eachine Cinecan】バインドから飛ばせる状態にするまでの最低限のBetaflight設定&ロスト防止にブザーの取り付けをやってみました!  【Emax Tinyhawk Freestyleフルカスタマイズ】Caddx Turbo EOS2カメラ&200mW出力VTX、Frsky xm+レシーバーでカスタマイズ!
【Emax Tinyhawk Freestyleフルカスタマイズ】Caddx Turbo EOS2カメラ&200mW出力VTX、Frsky xm+レシーバーでカスタマイズ!  【URUAV UR85】外部受信機Frsky xm+増設をやってみる!
【URUAV UR85】外部受信機Frsky xm+増設をやってみる!  気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】
気になっていた新機体がいろいろ届きました! 【Emax Tinyhawk Freestyle 115mm】【Eachine Tyro69 105mm】【Happymodel Larva X 100mm】  【Beta85 Pro2】ロスト防止にブザーを取り付ける!リソースのリマッピングでブザーポートがなくてもLED_STRIPを利用してブザーが使えるようになるんですね!
【Beta85 Pro2】ロスト防止にブザーを取り付ける!リソースのリマッピングでブザーポートがなくてもLED_STRIPを利用してブザーが使えるようになるんですね!  【FullSpeed TinyLeader】安定感抜群で飛ばしやすい!完成度の高いCine Whoop『FullSpeed TinyLeader HD』。
【FullSpeed TinyLeader】安定感抜群で飛ばしやすい!完成度の高いCine Whoop『FullSpeed TinyLeader HD』。  【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!
【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!  【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】
【Eachine Tyro69 105mm】ToothpickをDIYするキットが楽しそう!完成機を買うよりお安く自分仕様にカスタマイズや部品取りにも最適!?【付属パーツ紹介】

過去の記事へのコメント失礼いたします。
質問なのですがFrsky xm+を2つ持っているのですが初期に購入したものはプロポのバインドプロトコルがFrsky x でバインドしていますが後から購入したものはFrsky x2でバインドしましたFrsky のホームページにもバインドのプロトコルなどの情報は見当たりませんでした。
バインドのプロトコルは手当たり次第試してみるものなのでしょうか?
こんばんは〜〜(^^)
お騒がせしました!なんとかバインド&betaflight 設定完了しました!プロトコルの問題でした〜〜!あした、屋外で試験飛行してみたいと思います!
ありがとうございましたー(^。^)
よかったですぅ〜!
これでガンガン飛ばせられますね。
私も今、朝練中です。
また面白いお話、お聞かせ下さい。