
普段練習機として使っている1Sブラシレスフープ『URUAV UR65』の予備機的扱いで購入したBETAFPV『Beta65 Pro』。

0603モーターにも関わらず0802モーターを載せたUR65くんよりもパワーがあり、xm+レシーバー&Z02 AIOカメラ200mW出力で普段UR65くんが行けないところまで飛んでくれ、野外練習では大変重宝しております。
今日も寒かった!
カメラ1つ壊れたけど、Beta65Proくんが頑張ってくれた。
xmレシーバー + Z02 200mW出力でいつもは行けないとこまで飛んでいってくれた。
こいつかなりいける子やんか! pic.twitter.com/g9vsO19Z7O— ガジェット大好き!! (@smartphone_jp1) December 23, 2018

そんなBeta65 Proくんなんですが、激しいコーナーリングの際に機体がガクッと落ち込むことが多々あり購入当初からすごく気になっていました。
結局、朝2回戦したけど原因が分からない!
Beta65Proくんメチャ快適に飛んでくれるけど、加速時、ロール等で急旋回等するとガクッと機体が落ちる感じになる!
何でっすか?
betaflightの設定?どなたか教えてくださいませ! pic.twitter.com/z5DDsHJk85
— ガジェット大好き!! (@smartphone_jp1) December 22, 2018
Twitterで、「PIDのIを少し上げてみては?」「BLheliでモーター回転に異常がないか確認してみては?」等の助言をいただきましたが、なかなか症状が改善されず・・・!
激しいコーナーリングの際は少しスロットルを抜いたりして飛ばしていました。
そしてこの助言で一気に解決!
ありがたや~!
こんばんは、開局申請の記事は非常に参考になりました。ありがとうございます。ご存知かもしれませんが、Prop washでは?Betafrightのブラシモーターを逆回転にしてブラシモータをプロペラごと前後交換移動すると設定できます。これをProp Outというそうで75xは、最初からこの設定になってます。
— わぁちゃん (@wadaman1) December 31, 2018
このような激しいコーナーリングで機体が落ち込む(流される?)現象を『Prop wash』と呼ぶそうで、機体のペラ構成を反転させる『Props Out』により改善されるというもの。
そんな用語、今回はじめて知りました。(ド素人ですいません!)
確かに私の持っているBeta75Xくんは、デフォルトでこのようにペラの回転が反転した構成になっています。


今まで「何で反転させた構成になってるのかな?」程度で特に深く考えたことなかったのですが、ほんと後悔!
『Prop wash』が『Props Out』構成にした機体ではその機体のガタツキ?(落ち込み?)が軽減されている様子がこちらの動画で非常に分かりやすく解説されているのでご覧ください!
激しいコーナーの際に機体がガクッと落ち込んでいるのが分かります。
私のBeta65 Proくんもまさしくこんな感じになっていました!
そしてペラ構成を反転させた『Props Out』構成にした機体ではそれが改善されスムーズにコーナーを切っています!
ずっと気になってた問題が解決しスッキリしたとともに大いに勉強になりました!
機体を『Props Out』構成にしてみる!
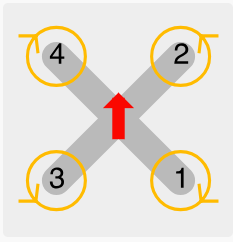
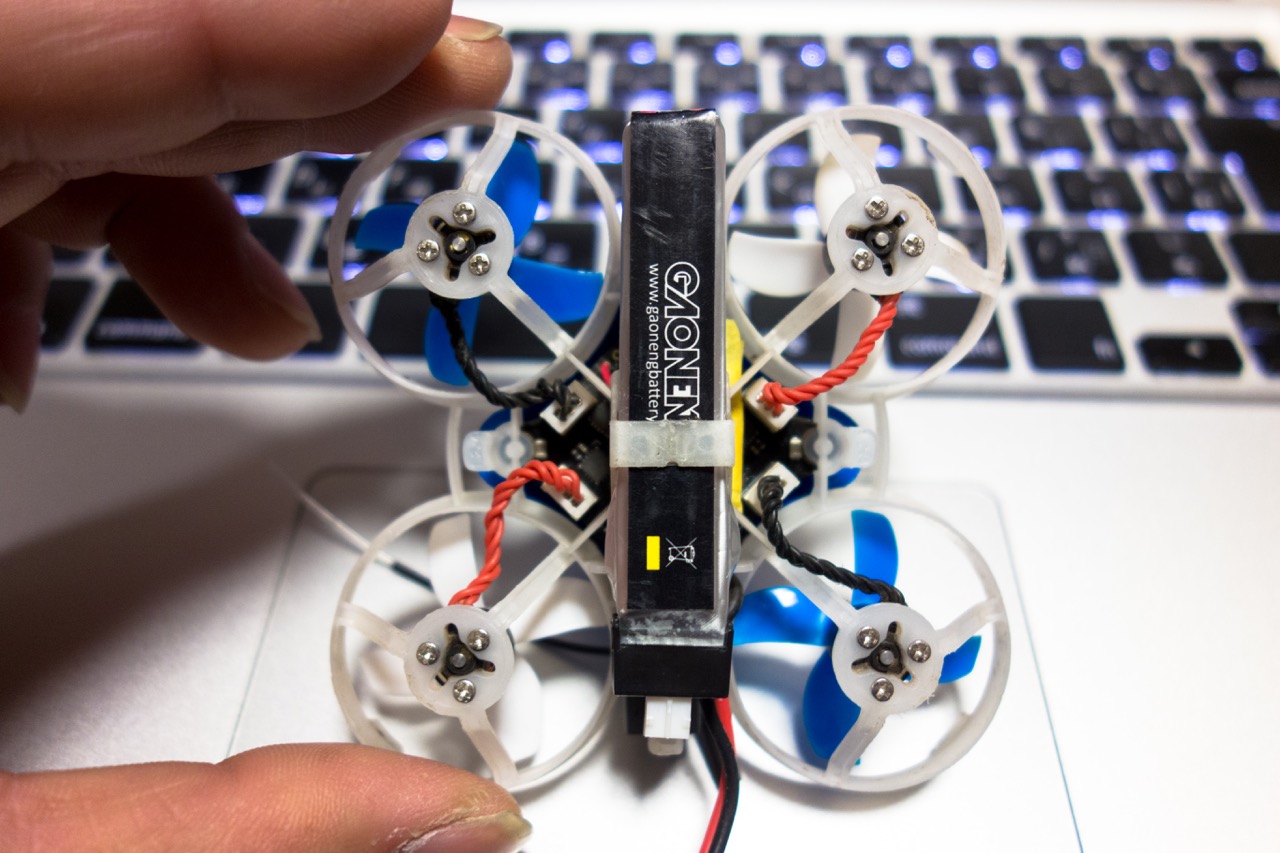
まずはこちらが通常の状態です。
モーター1とモーター4が正回転(赤ケーブルモーター&白ペラ)、モーター2とモーター3が逆回転(黒ケーブルモーター&青ペラ)となっています。

その構成を入れ替えます。

モーター1とモーター4が逆回転、モーター2とモーター3が正回転とします。(ペラも同様)
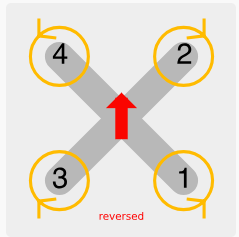

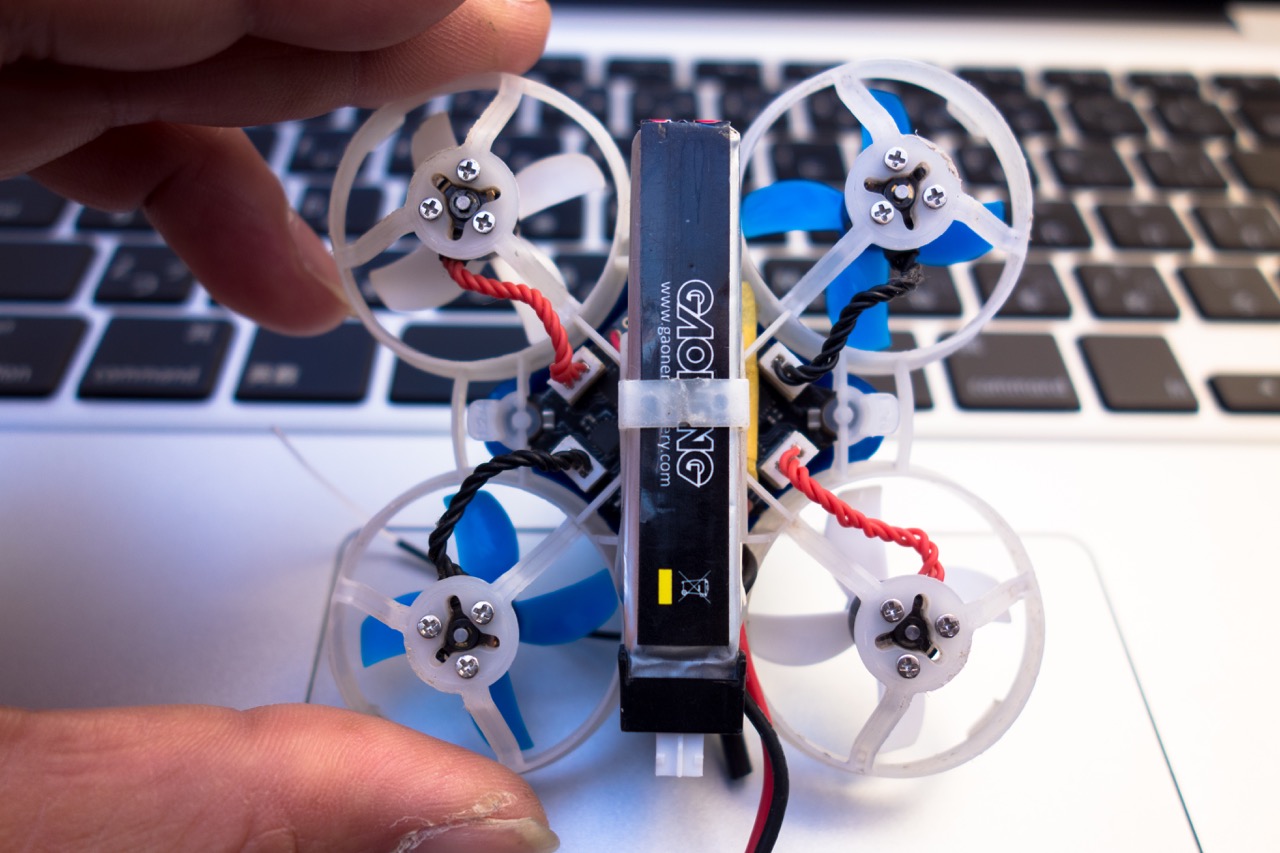
つまり、通常の状態からモーターをペラを付けたまま前後入れ替える(モーター1 ⇔ モーター2、モーター3 ⇔ モーター4)感じですね!
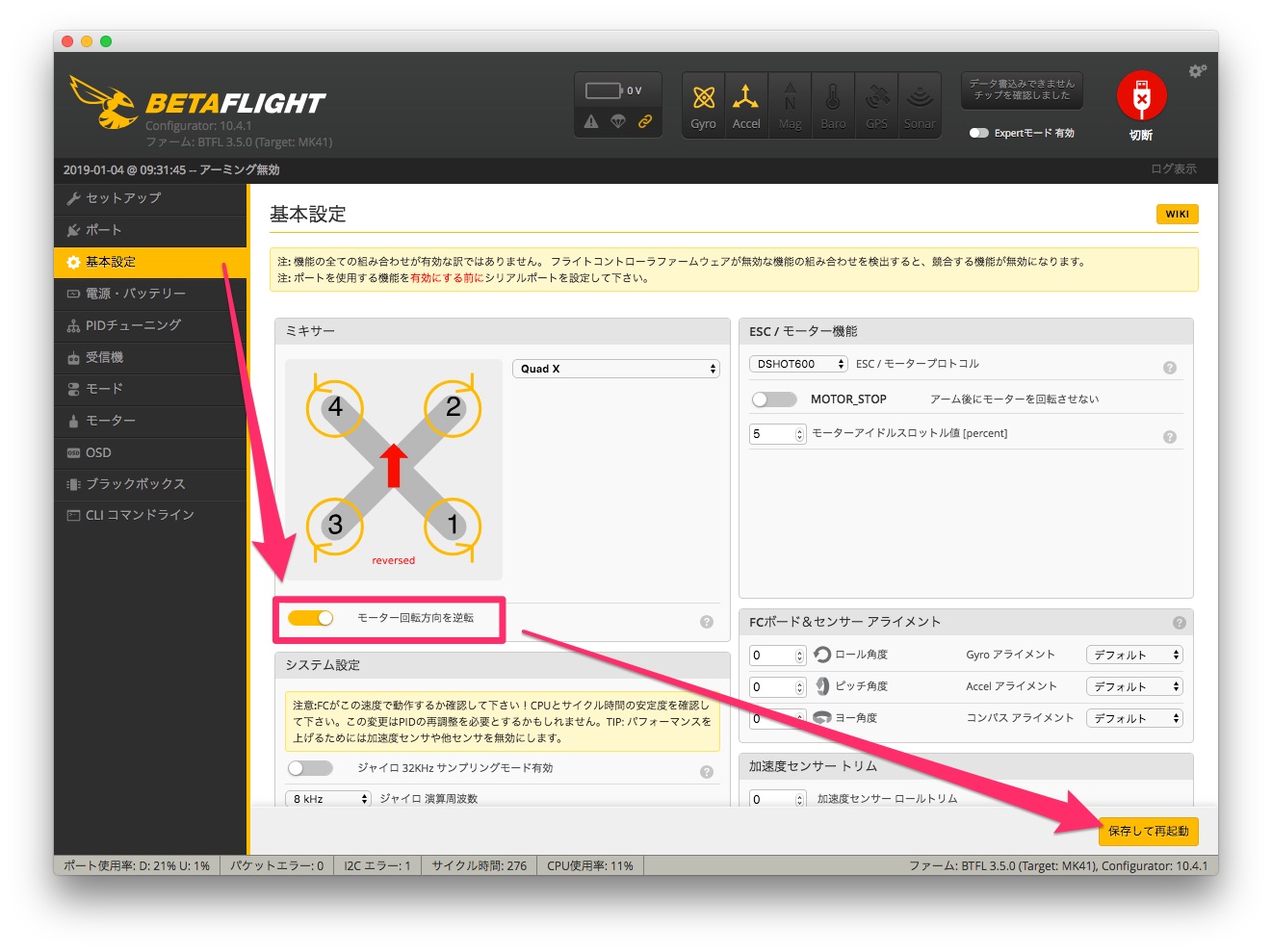
次にBetaflightからモーターをリバース設定にします。
【基本設定】から[モーター回転方向を逆転]にチェックを入れ[保存して再起動]をクリックして設定完了です。
以上で完了です!
『Props Out』構成にすることで、激しいコーナーリングで機体がガクッと落ち込む『Prop wash』が発生していたBeta65 Proくんですが完全ではありませんがほぼ改善されました。
あとはPID等の設定で調整していく必要がありそうですが、今回は大いに勉強になりました。
参考 Know More about Props OutBETAFPV

コメントを残す