
何かと話題なToothpick、みなさんもう飛ばされていますか?
使われているFCやモーターなど主要なパーツはWhoopと同じなんですが、Toothpick(爪楊枝)と呼ばれるペラガードがない軽量フレームに載せ替えただけで驚く飛びを見せてくれます。
そして先日、はじめてのToothpick機『Happymodel Sailfly-X』を飛ばしてきました。


デフォルトのレーツ設定は通常のWhoopと比べて少し高い設定になっており、機体パワーも手伝いはじめて飛ばされる際スゴく驚かれると思います。(私だけかな?)
カッ飛んでいきます!
私のようにWhoopから少しステップアップしSailfly-Xをこれから飛ばされる方多いと思います。
当ブログにもそのような方から何通かメールを頂きましたので、機体を飛ばすまでのバインドから最低限のBetaflight設定をご紹介したいと思います。
とは言っても構成パーツはWhoopと変わらないのでBetaflight設定やバインド方法等も今までのWhoopと同じ要領なんですが。
それでは簡単にBetaflight設定見ていきましょう。
目次
【Happymodel Sailfly-X】バインドからBetaflight初期設定まで!

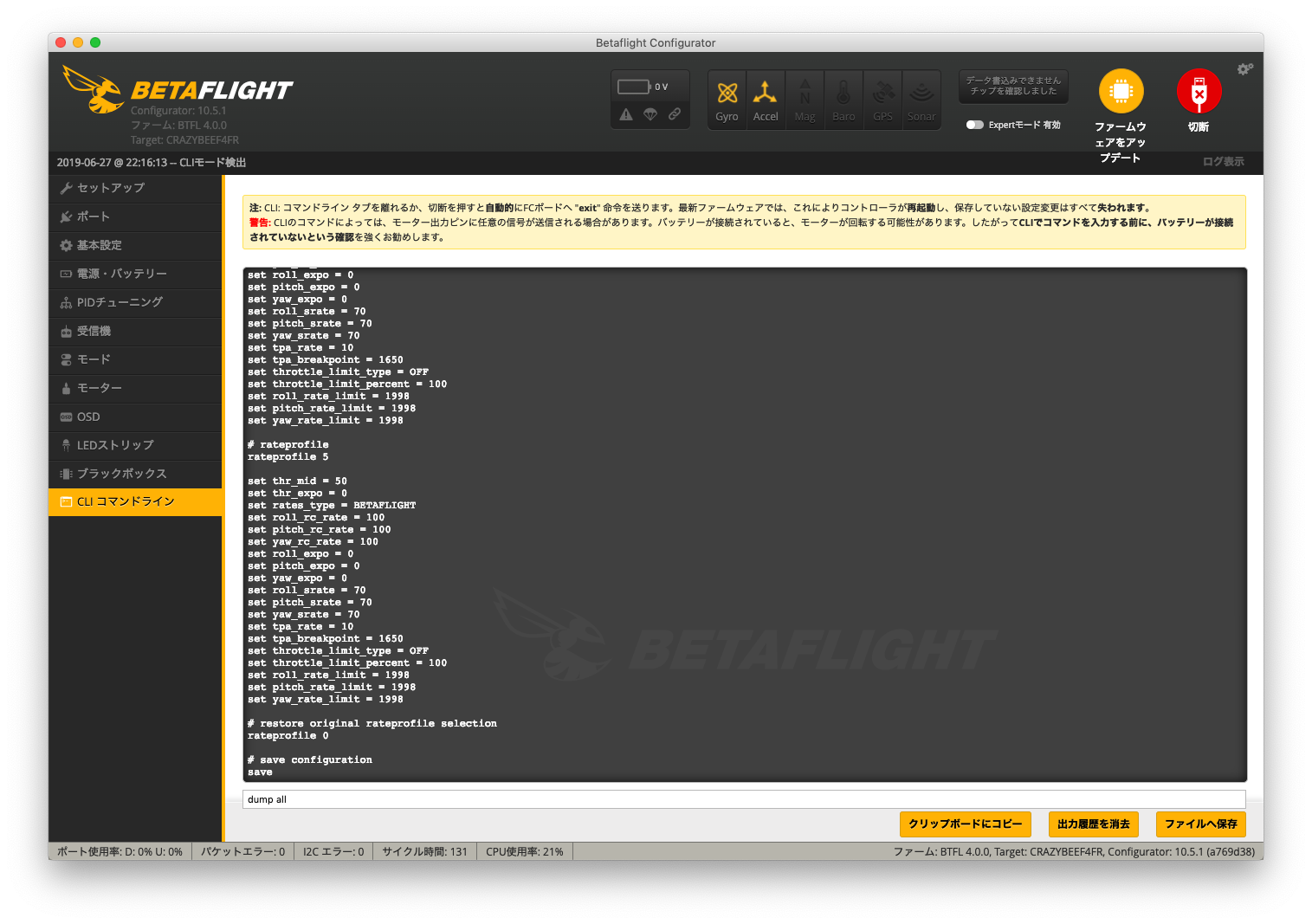
まずはデフォルト状態の設定ファイルを保存!
デフォルトでインストールされていたファームウェアは、『CRAZYBEEF4FR 4.0.0』。
FC内蔵受信機はFrsky版です。
CLIコマンドラインからデフォルト状態の設定を『dump all』で保存しておきましょう。
ポート設定!
ポート設定は初期状態で問題なさそうですね。
UART1にSmart Audioが割り振られています。
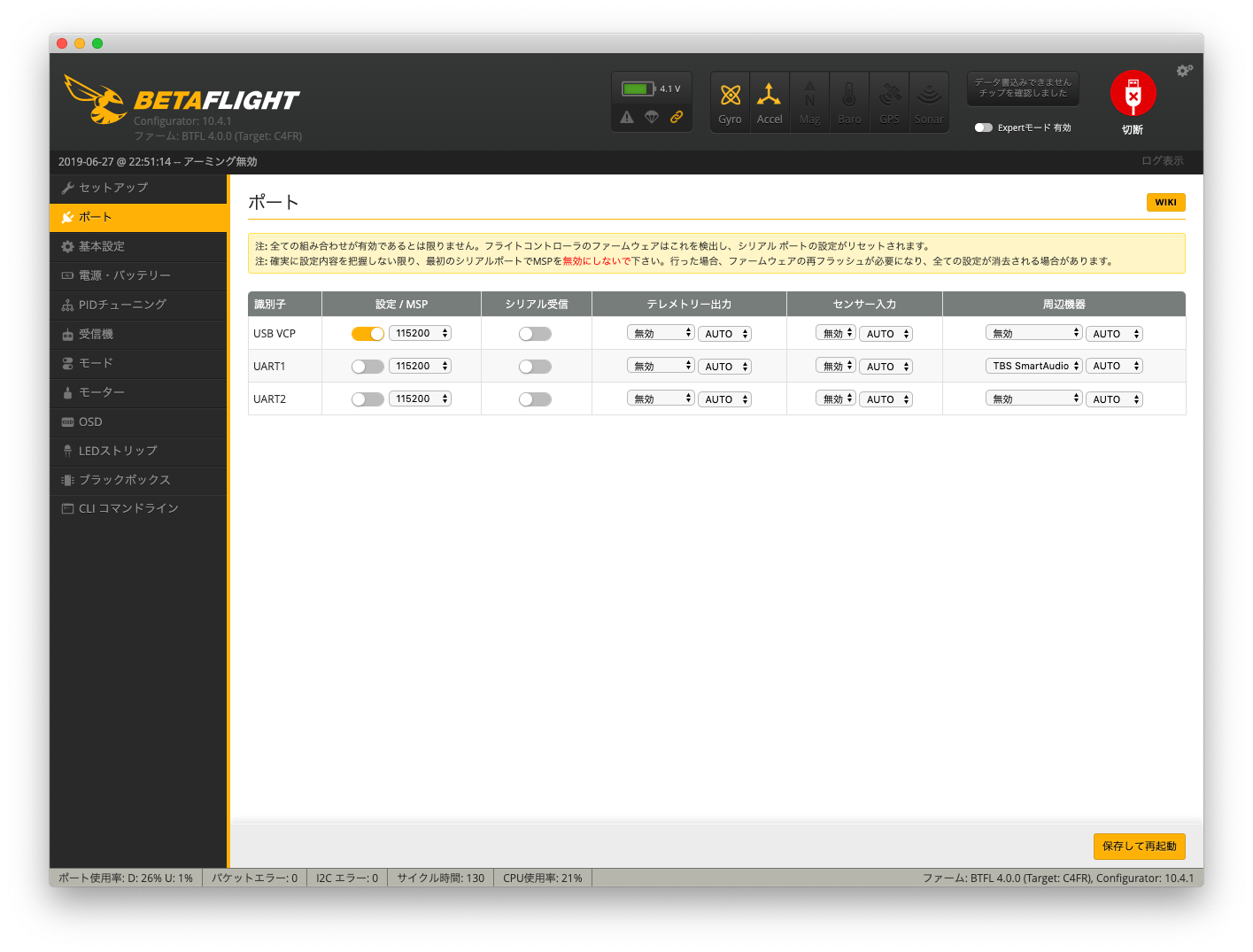
野外機なので後々、外部受信機(Frsky xm+)を増設しようと考えています。
SBUSの入力は付属のマニュアルを見るとIRX1というInverter for SBUS input(SBUS反転入力)ポートを使う必要があるので、Smart Audio端子をTX2(UART2)ポートに繋ぎ直す必要がありそうです。

このあたり外部受信機増設の際、あらためてご紹介できたらと思います。

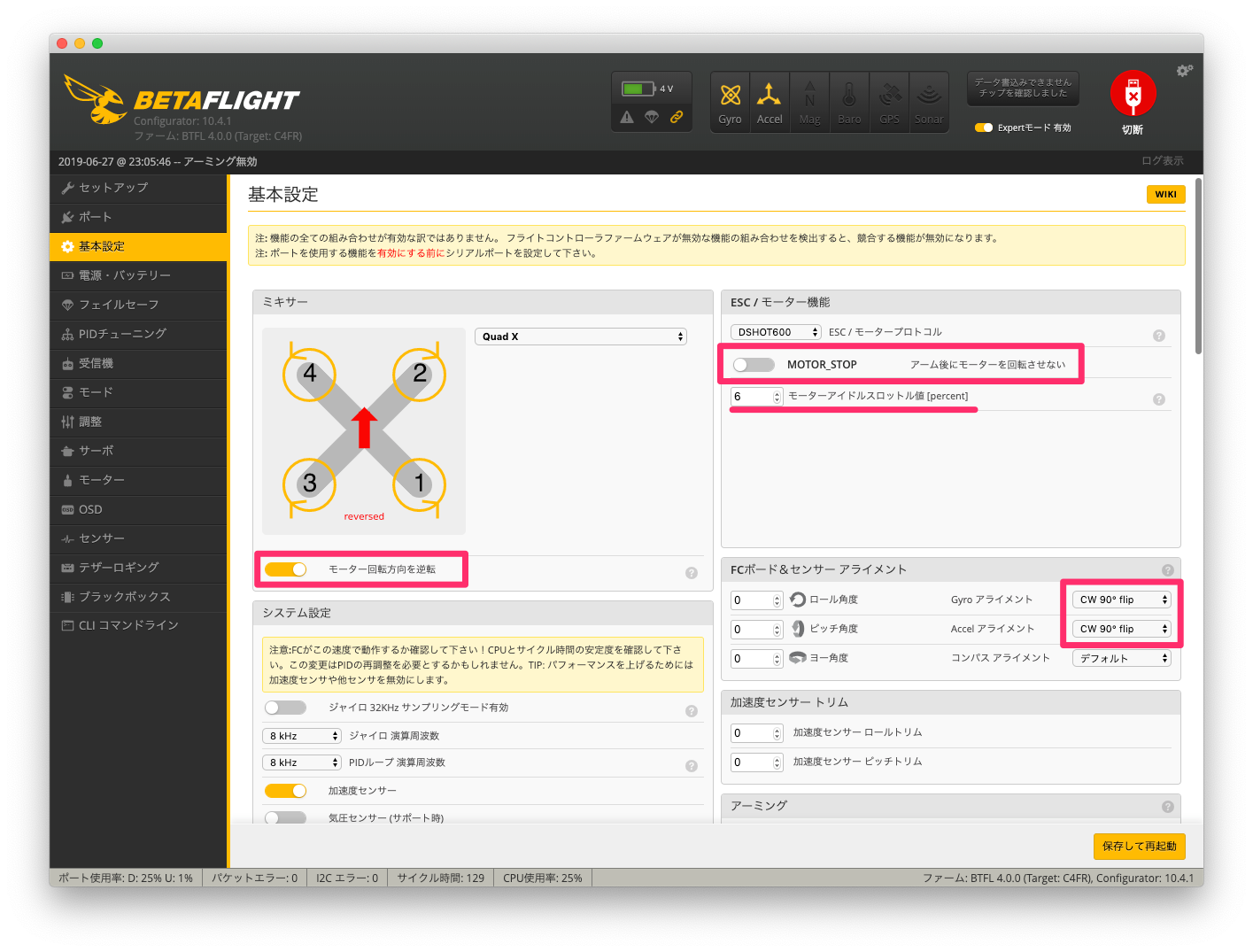
基本設定!
デフォルトでは「モーター回転方向を逆転」設定されていません。
Whoopの場合、Prop Wash対策で逆転設定をしていましたがToothpickは形状が違うためこの設定の効果はどうなんでしょうか?
一応ここではいつものようにモーター回転方向を逆転に設定してみました。
モーターアイドルスロットル値をデフォルトの4.0から6.0に上げてみました。
Sailfly-XはFCが逆向きに設置されているので、FCボード&センサーアライメントの項目のロールとピッチ方向に90度反転設定がされています。(デフォルト)
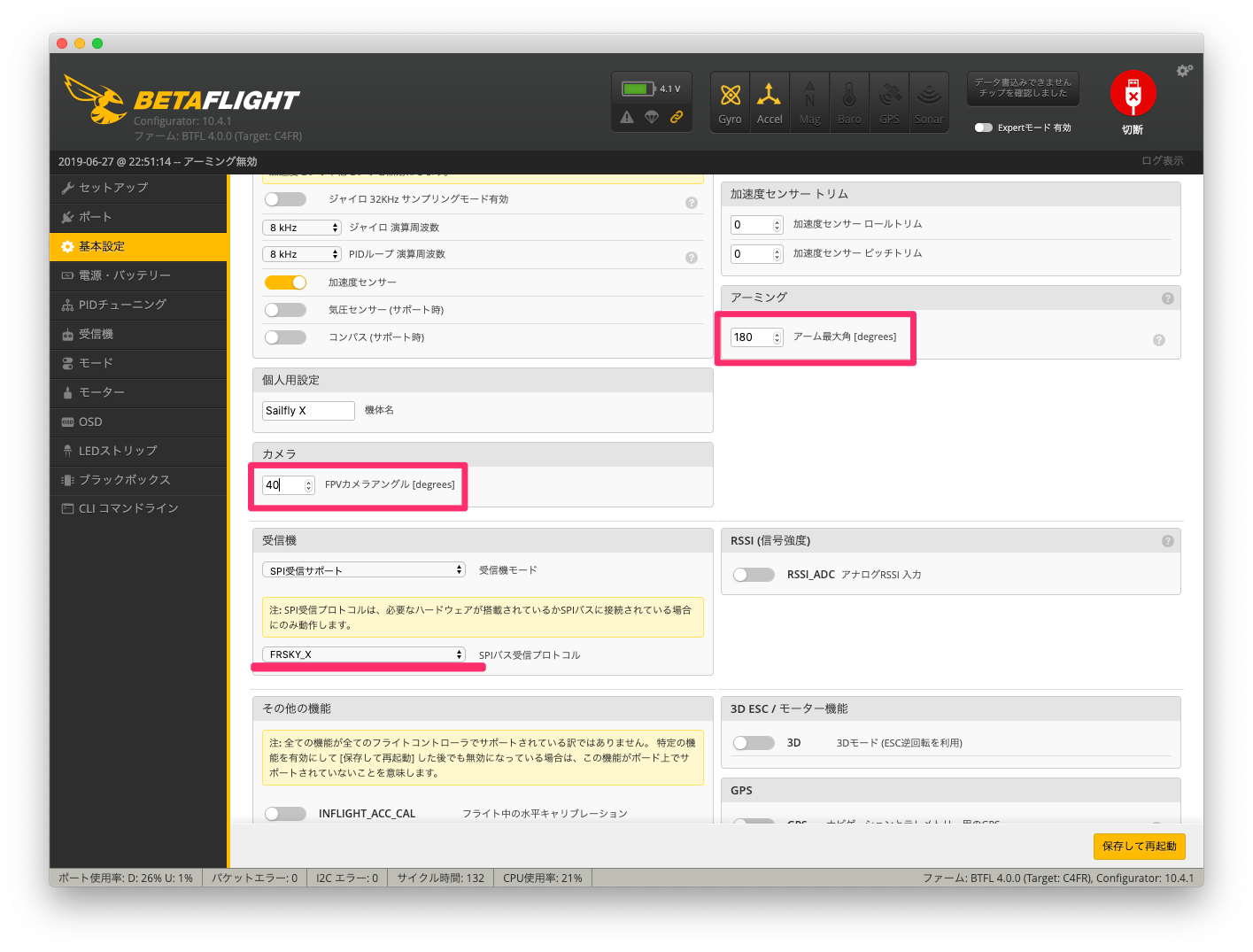
カメラ角度は赤色キャノピー使用なので40度設定。
受信機設定は、デフォルトのFRSKY_D(D8)からFRSKY_X(D16)に変更しました。
アーミング角度もデフォルトで180度に設定されているので問題ないですね。
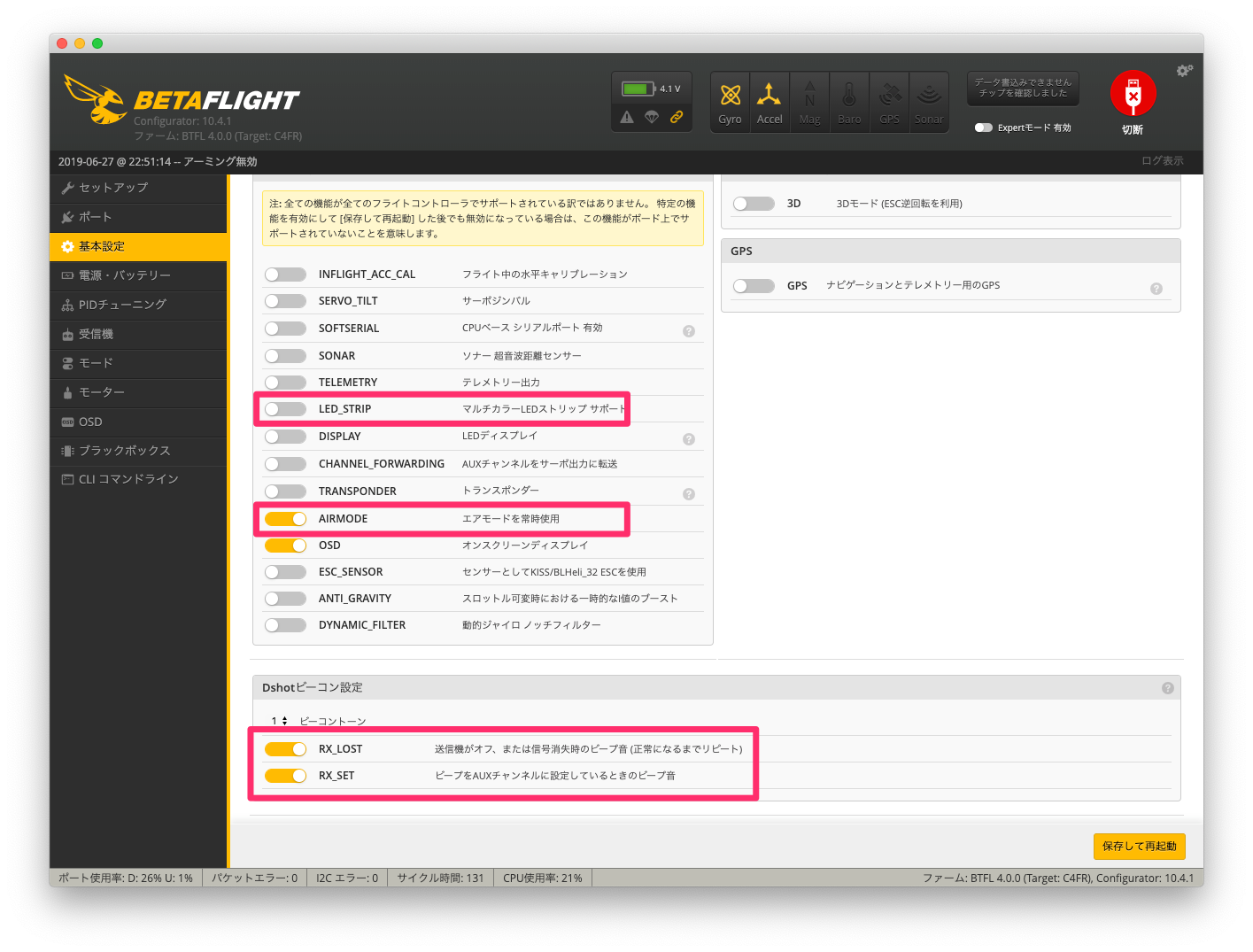
LED_STRIPがデフォルトでONとなっていましたが使用しないのでOFF設定。
AIRMODEはデフォルトではOFFとなっていましたがON設定にしました。
ANTI_GRAVITYはデフォルトではOFFとなっていますが、このあたり普段飛ばされている機体設定で。
DshotビーコントーンはON設定にしました。
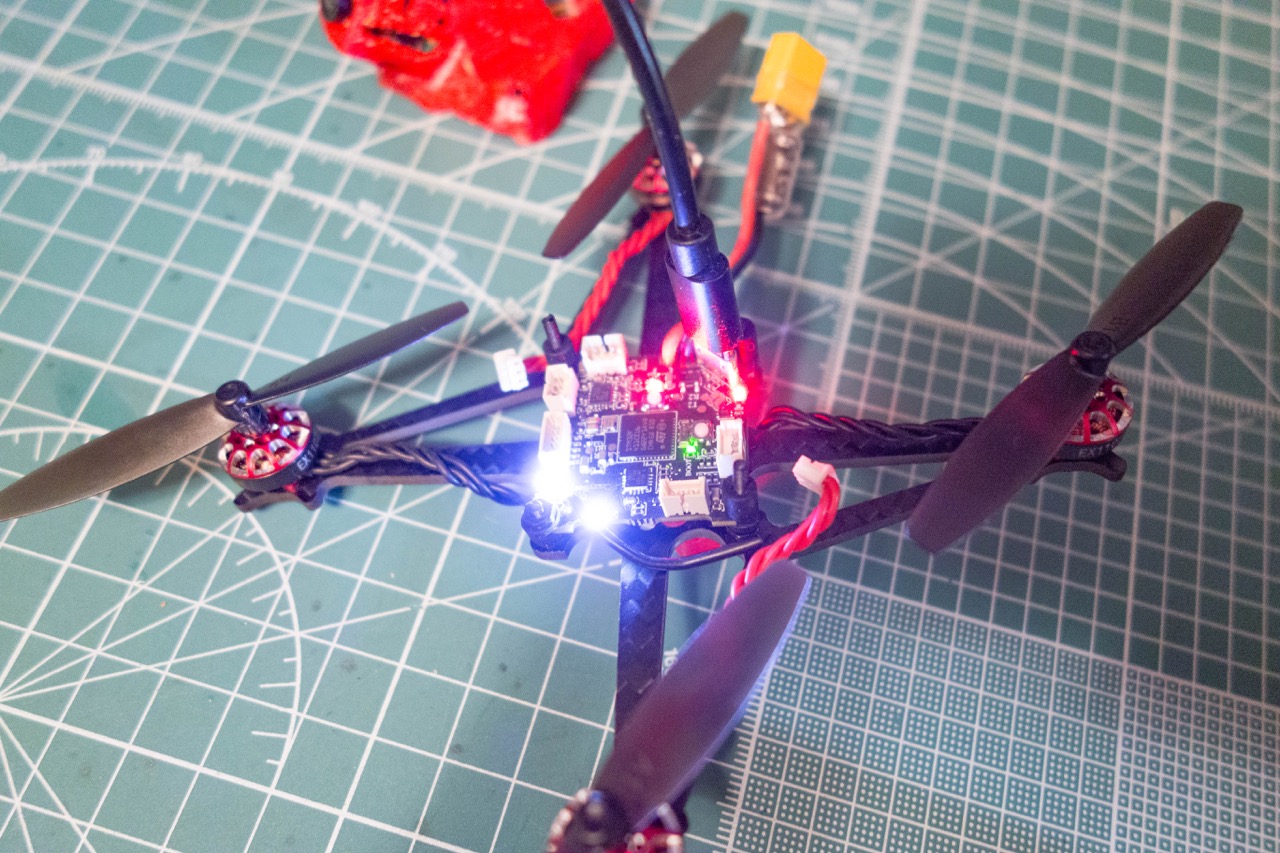
機体と送信機をバインドさせる!
上記で受信機設定が完了したら、送信機と機体をバインドしていきます。
USB接続からの給電のみ(バッテリー接続の必要はありません)でバインド設定ができます。
FCのBINDボタンを押すと点滅している白と赤のLEDが点灯してBINDモードに入ります。
あとは送信機のBINDボタンで完了です。
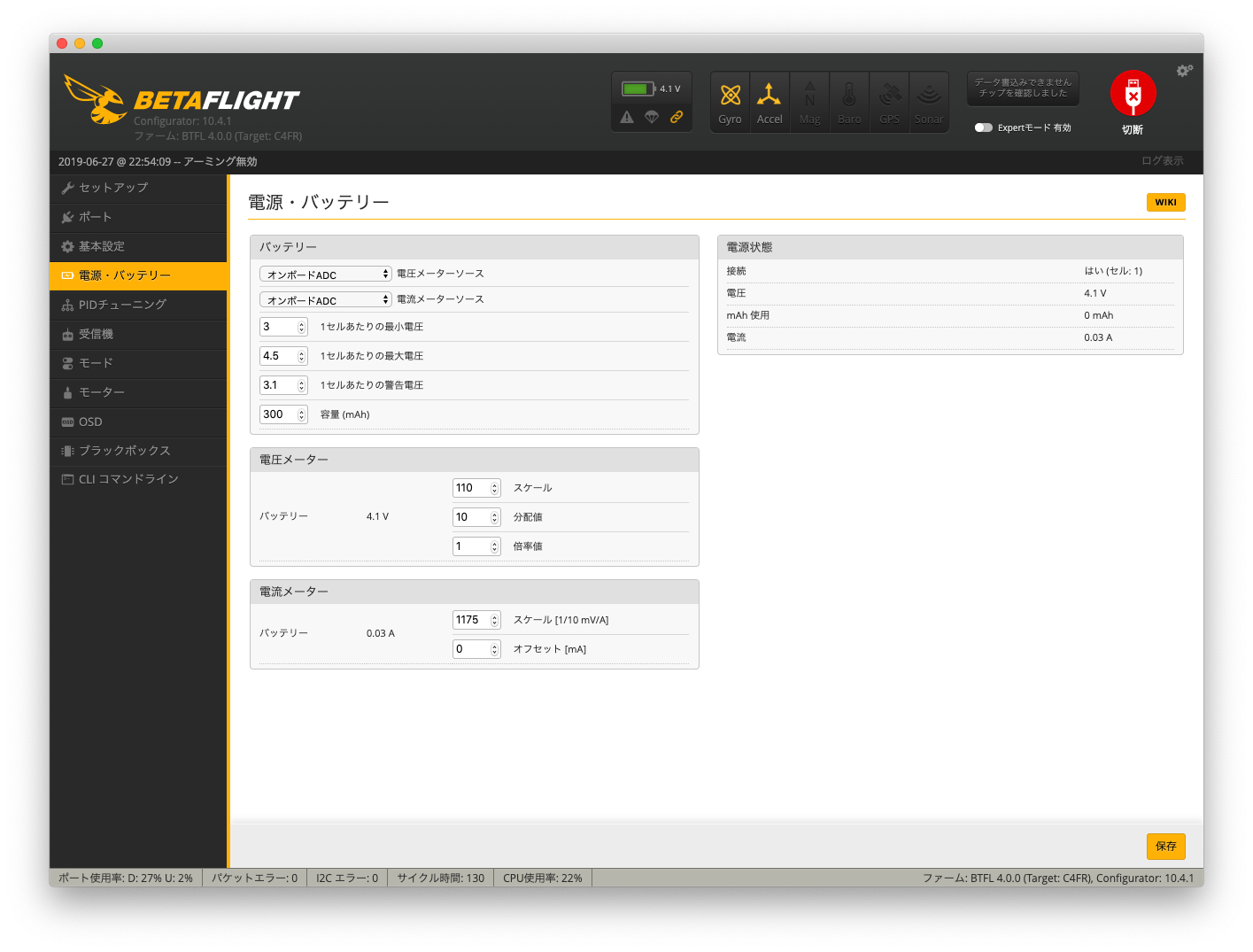
電源・バッテリー設定!
デフォルト設定で問題ないかと思います。
普段飛ばしているWhoopに近い設定に少し変更。
飛ばしながら微調整していけばいいと思いますが、5分近く飛ばしてもバッテリー警告が出ず集中力が切れてしまうことが多々あったのでもう少し高めの設定でもいいかもしれませんね。
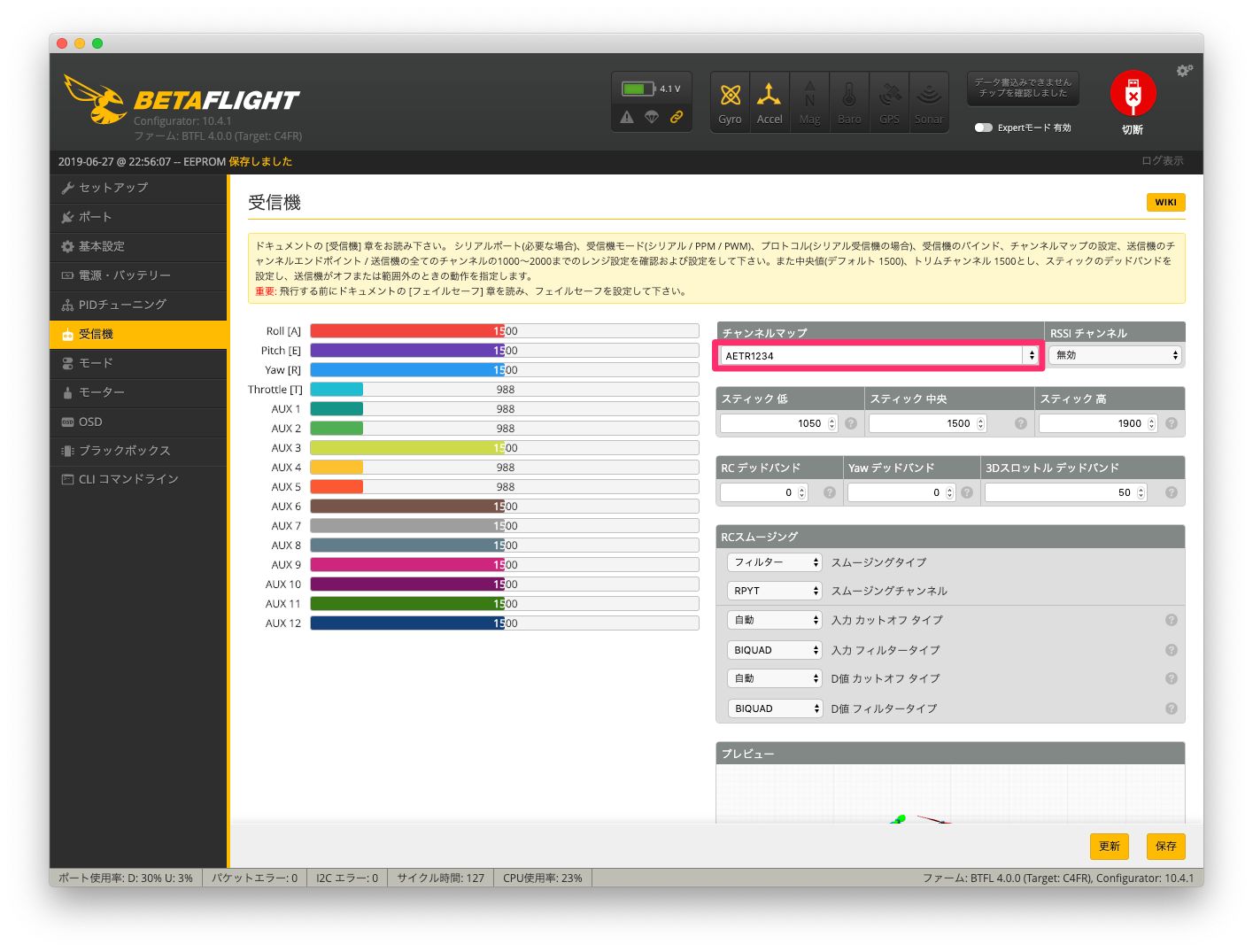
受信機設定!
バインドが完了したら受信機設定でお使いの送信機にあうチャンネルマップを設定。
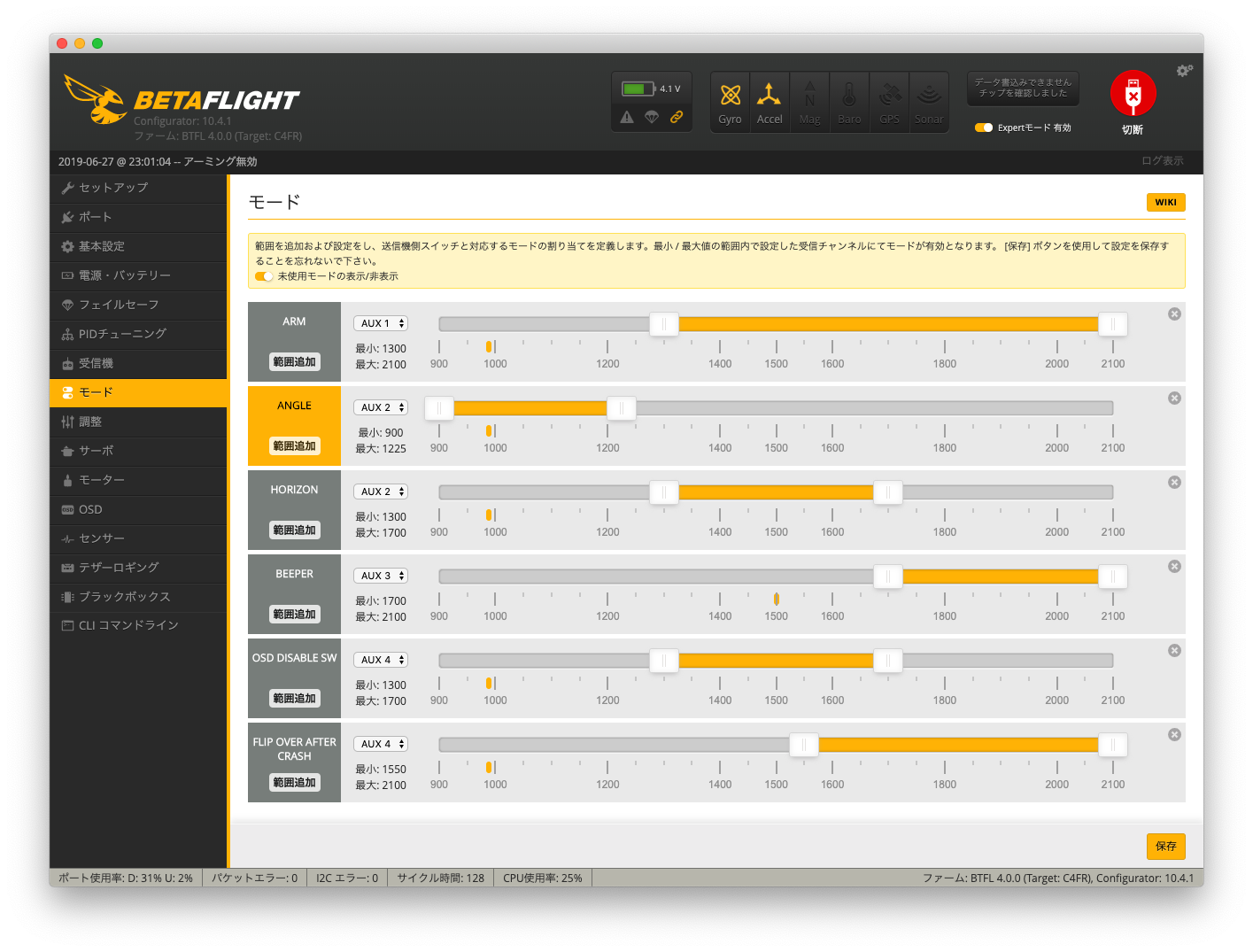
モード設定!
普段、ANGLEモードやHORIZONモードで飛ばすことはないですが一応設定。
BEEPER設定もお忘れなく!
OSD設定
いつもこんな感じに設定しています。
基本バッテリー残量は1セルの電圧を見ますが、Sailfly-Xは2〜3セルバッテリーが使えるので飛ばしている最中に今使っているバッテリー2セルだっけ?3セルだっけ?とたまに?になることがあるので、全体のバッテリー電圧も表示させています。

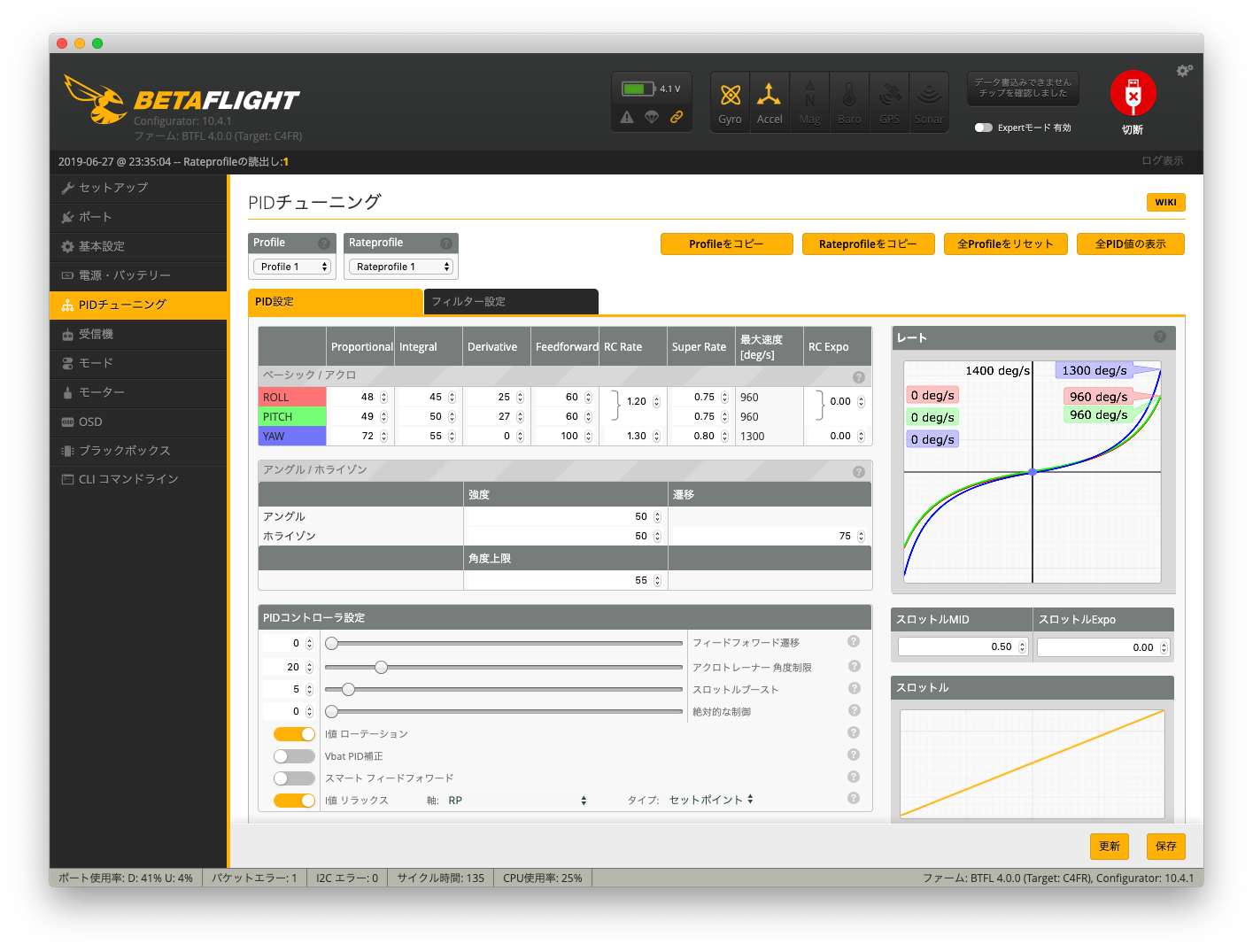
PIDチューニング
デフォルトで設定されているPIDおよびRateprofileはこんな感じとなっています。
普段私がWhoopで飛ばしているレーツ設定より少し高い感じとなっていました。(通常のWhoopのデフォルト設定よりも高い)
一応こんなに小さい機体ですがレーサー機という位置付けなので高めの設定がされているのだと思いますが、はじめてToothpick機を飛ばす場合、少しWhoopの飛びとは違うので少しレーツは下げておいた方がいいかもしれませんね。(すぐに慣れちゃいますけど!)
ぶっ飛んで地面に突き刺さってしまいます!
スロットルに関してはBetaflightでは特に設定せず、飛ばしながら送信機側で少しスロットルカーブの調整をしました。
はじめてのToothpick機ということもありどんな飛びをするのか全く想像もつかなかったため、3パターンのRateprofileを用意し送信機の3ポジションスイッチで切り替えれるようにして初飛行に望みました。
Profile1 デフォルトのレーツ
Profile2 普段85mm Whoopを飛ばしているレーツ設定
Profile3 かなり抑えたレーツ設定 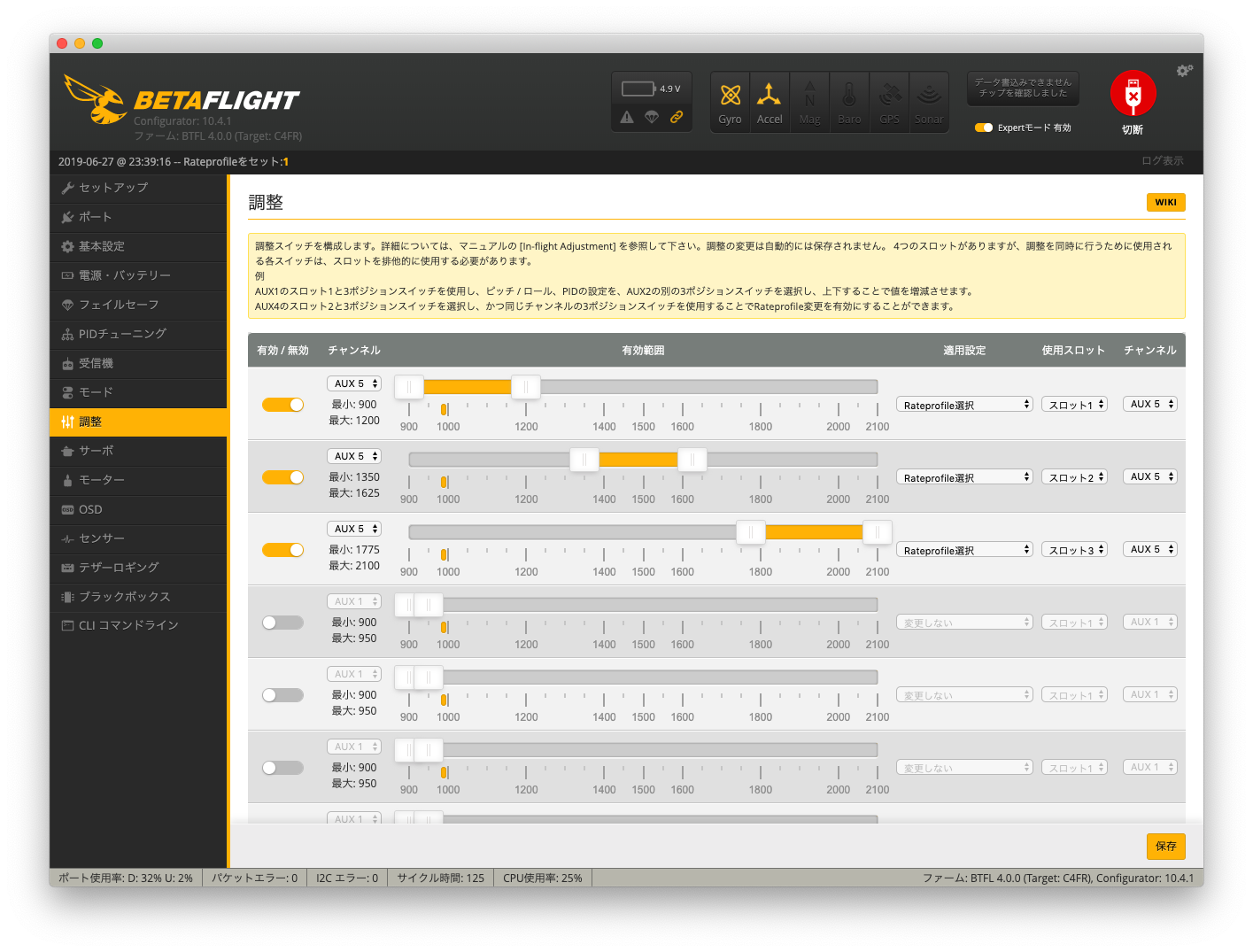
これは正解だったかも!?
普段Whoopで飛ばしているレーツより少し下げてあげると問題なく飛ばせました。
数回飛ばしてると感覚がつかめてくるのでそこから上げていくのがいいかもですね!
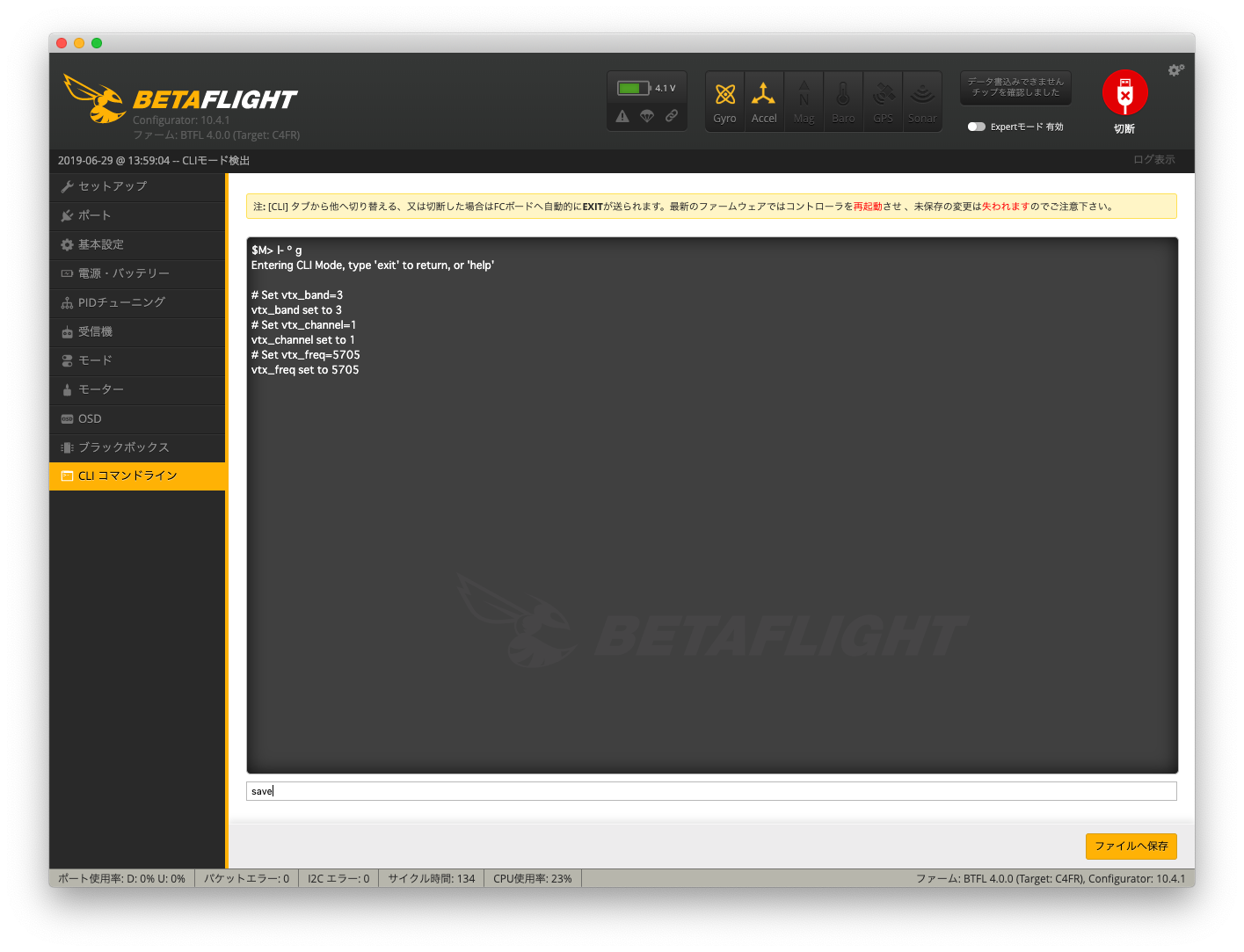
VTX周波数設定(Band and Channel)
CLIコマンドラインからVTXの出力周波数も設定しておきましょう。
最後に「save」もお忘れなく!
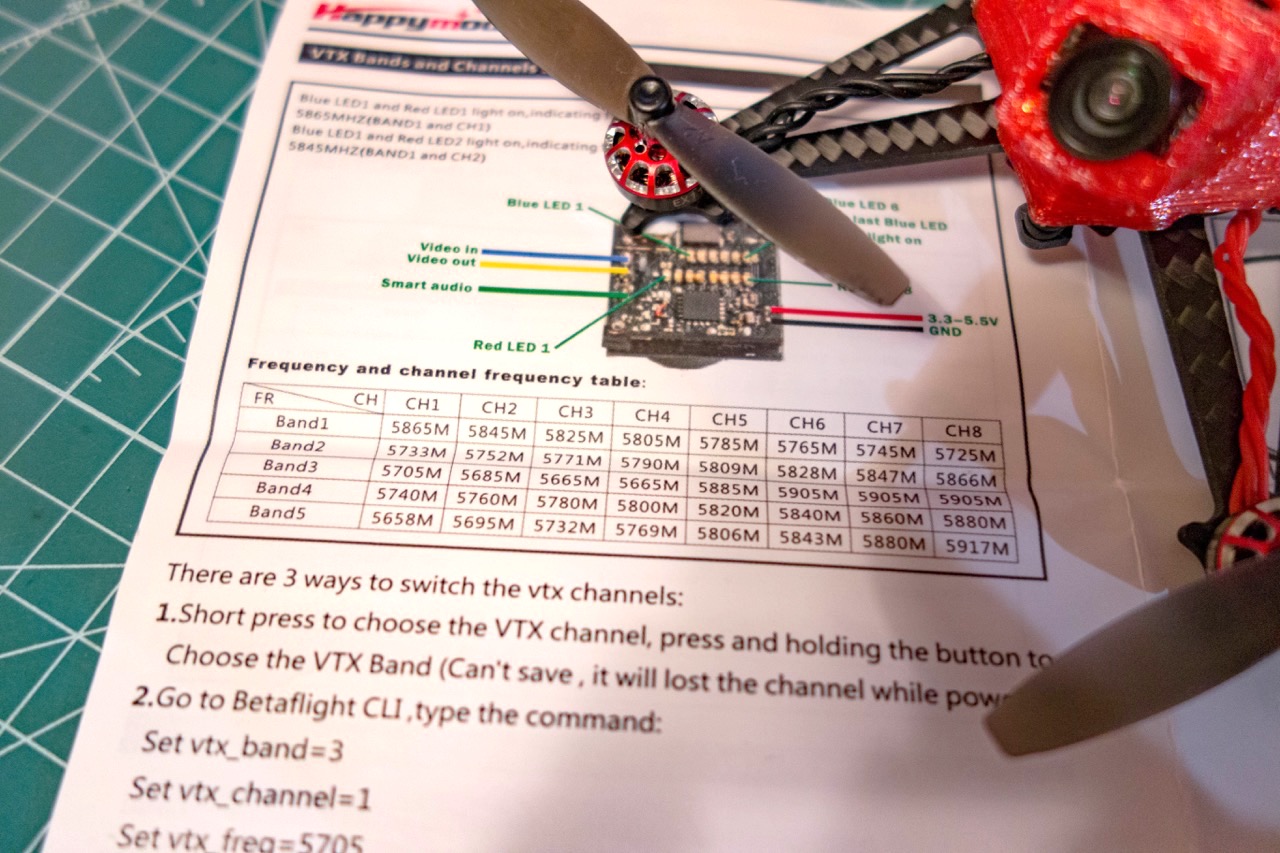
Set vtx_channel=1
Set vtx_freq=5705
save
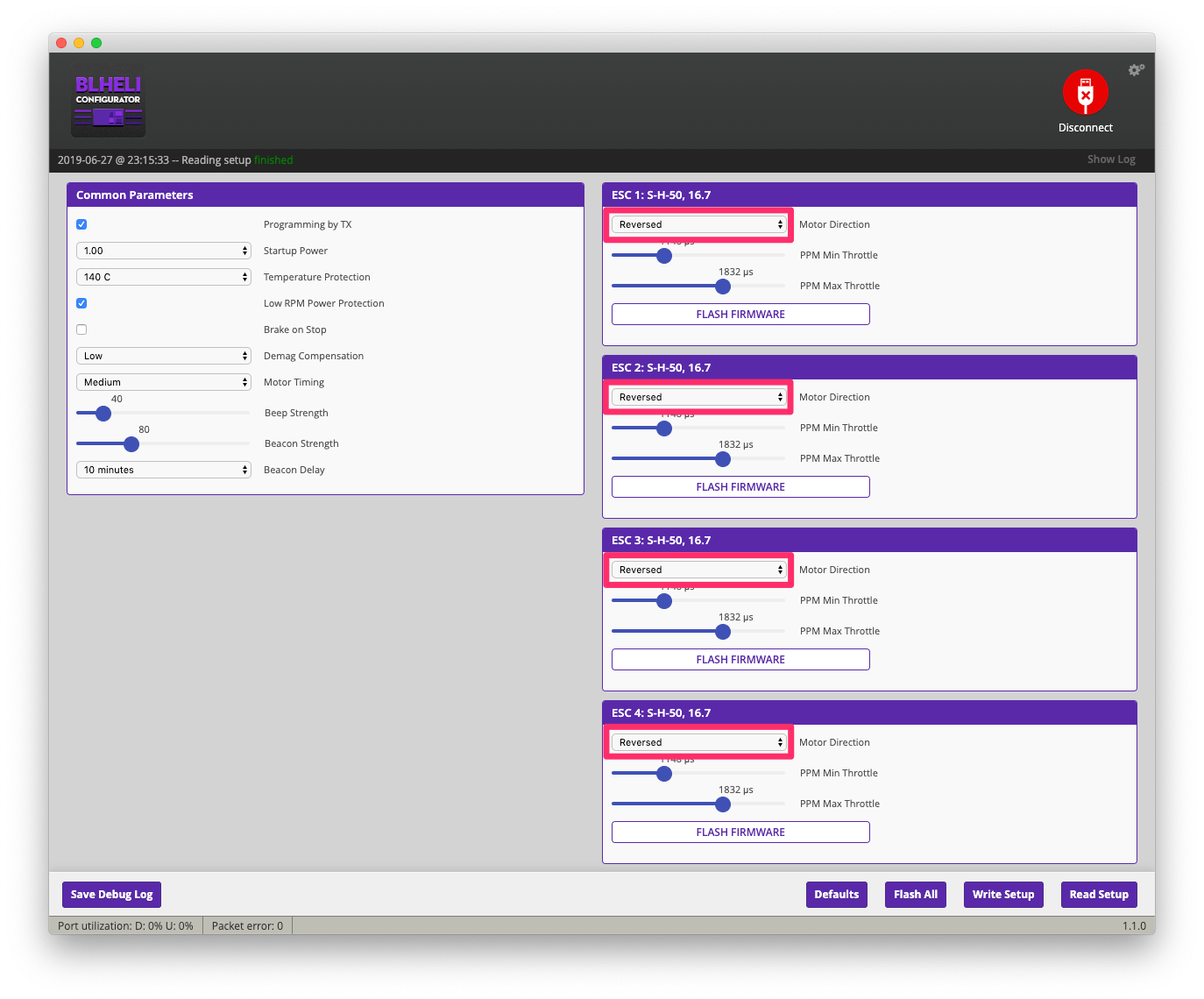
BLHELI設定!
上記でモーター回転方向を逆転設定にしたので、BLHELIでモーター回転をReversed設定しておきます。
BLHELIの設定もバッテリー接続は必要なくUSB接続のみで可能となっています。
ESC1〜ESC4すべてのモーターをReversed設定して完了です。
こんな感じでSailfly-Xを最低限飛ばせる状態にできました。
あとはご自分のスキルに応じて調整していけばいいと思います。
それにしても気持ちよくカッ飛んでくれます!
予備パーツがまだ届いていないのであまり無茶な操縦はできませんが、メチャ楽しいっすよ!

 お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!
お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!  久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?
久しぶりに4セルToothpick飛ばしたらメチャ楽しかった!次はサイズアップして3インチ機かな?  Sailfly-XくんのFC焼けました!3セルToothpickで5A ESCってどうなの?FC変えて作り替えてみました!
Sailfly-XくんのFC焼けました!3セルToothpickで5A ESCってどうなの?FC変えて作り替えてみました!  【Happymodel Sailfly-X】これまでのカスタマイズ&スペアパーツご紹介!
【Happymodel Sailfly-X】これまでのカスタマイズ&スペアパーツご紹介!  【 Happymodel Sailfly-X】外部受信機(Frsky xm+)増設。これでCaddx Turbo EOS2カメラ&200mW出力VTX&フルレンジレシーバーのSailfly-X完成!
【 Happymodel Sailfly-X】外部受信機(Frsky xm+)増設。これでCaddx Turbo EOS2カメラ&200mW出力VTX&フルレンジレシーバーのSailfly-X完成!  【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ!
【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ! 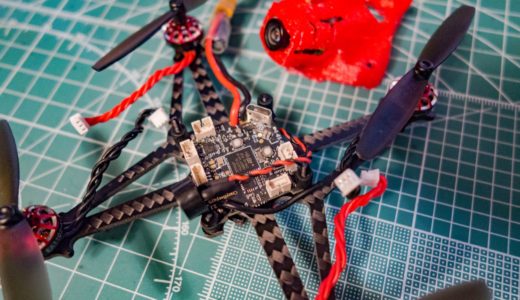 【Happymodel Sailfly-X】 野外ロスト防止にブザーを取り付ける!
【Happymodel Sailfly-X】 野外ロスト防止にブザーを取り付ける!  【Toothpick】はじめてのToothpick機『Happymodel Sailfly-X』を飛ばしてみた。スピード&パワーは全くWhoopとは別物!飛行時間は6分近くも飛んでくれます!
【Toothpick】はじめてのToothpick機『Happymodel Sailfly-X』を飛ばしてみた。スピード&パワーは全くWhoopとは別物!飛行時間は6分近くも飛んでくれます!  【Speedy Bee】スマートフォンでBetaflight設定!1台持っていると何かと便利『Speedy Bee Bluetooth-USB Adapter』。
【Speedy Bee】スマートフォンでBetaflight設定!1台持っていると何かと便利『Speedy Bee Bluetooth-USB Adapter』。  【Happymodel Larva X 100mm】飛ばせる状態にするまでのBetaflight基本設定&ブザーの取り付けをやってみる!
【Happymodel Larva X 100mm】飛ばせる状態にするまでのBetaflight基本設定&ブザーの取り付けをやってみる!  初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました! 【Happymodel Sailfly-X】 野外ロスト防止にブザーを取り付ける!
初3インチ機Eachine TwigやInsta360 GOなどなど、ようやくいろいろと届き始めました! 【Happymodel Sailfly-X】 野外ロスト防止にブザーを取り付ける!  【EMAX Tinyhawk Freestyle 115mm】とにかく飛びが軽くて飛ばしやすいToothpickです!
【EMAX Tinyhawk Freestyle 115mm】とにかく飛びが軽くて飛ばしやすいToothpickです!  Emuflightのテストしたかったのに・・・!FC内蔵受信機でRX LOSS頻発、野外機は受信機増設が必須かな?
Emuflightのテストしたかったのに・・・!FC内蔵受信機でRX LOSS頻発、野外機は受信機増設が必須かな?  【Toothpick化】Happymodel Mobula7をToothpick化してみた!2セルToothpick機だけどコイツもよく飛んでくれます! お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!
【Toothpick化】Happymodel Mobula7をToothpick化してみた!2セルToothpick機だけどコイツもよく飛んでくれます! お気に入りの軽量Toothpickで練習。マウントしやすく使いやすいLarva Xキャノピーが最近のお気に入り!


コメントを残す