
先日お仲間になった1セルブラシレスWhoop『Happymodel Snapper6』のBetaflight設定をやっていこうかと思います。
特段新しい機体でもないのですがURUAV UR65やEachine US65などとともに、これからはじめるブラシレスWhoopとしていいかと思います。


機体構成的には、FC&AIOカメラはUR65と同様でモーターは19000KVの0603とこちらはUS65と同じ物となっています。
機体スペック的には後発機となるUS65の方に軍配が上がりそうですが、アルミダクトが使われておりフレーム構成の違い、このあたりで選択が分かれるといったところでしょうか?
実際ここ数日この機体を飛ばしてきましたが、アルミダクトの恩恵みたいなものは特に感じることはなく、重量的にも少し重くなるので軽いフレームへの変更が望ましいのかな?なんて考えています。
こうなってくると完全にUS65との違いがなくなってしまいますが・・・。
機体構成的にはUR65やUS65と同様なカスタマイズが出来るかと思います。
こちらも参考にしてみて下さい!
それではHappymodel Snapper6をBetaflight設定をやっていきます。
目次
【Happymodel Snapper6】バインドからBetaflight設定をやってみる!
それではHappymodel Snapper6を飛ばせる状態にするまでのバインドからBetaflightの設定をやっていきます。

BetafilghtのバージョンはBTFL3.3.0と少し古いものとなっているのでファームウェアのアップデートをしたいところですが、このSnapper6がはじめての機体という方も多いと思いますのでこのまま進めていきます。
デフォルトの設定値を保存!
まずは初期状態の設定を保存しておきます。
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。

ポート設定!
ポート設定はデフォルトの設定で特に問題なさそうです。

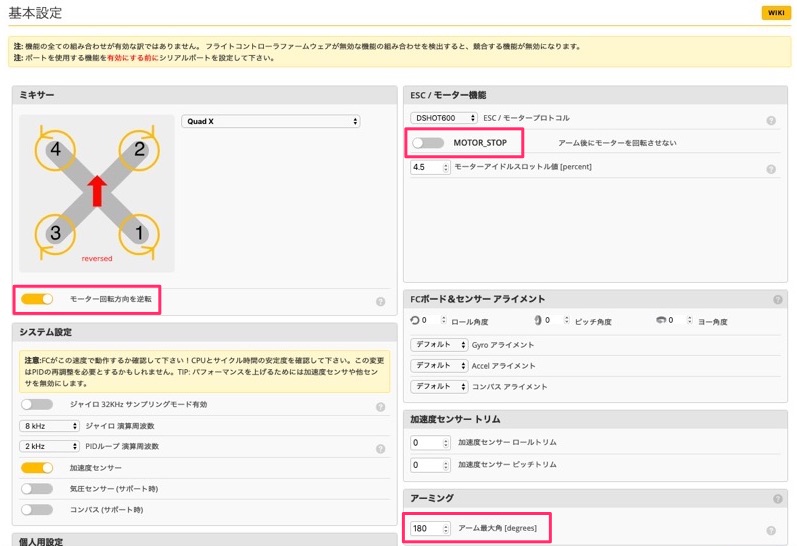
基本設定!
デフォルトで[モーター回転方向を逆転]設定にされていないので、Prop Wash対策のために逆転設定にしました。

[MOTOR_STOP(アーム後にモーターを回転させない)]をオフに変更。
[アーム最大角]をデフォルトの25°から180°に変更しました。
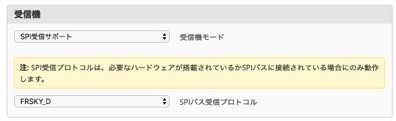
[受信機]設定は、デフォルトのFRSKY_Dで進めていきます。
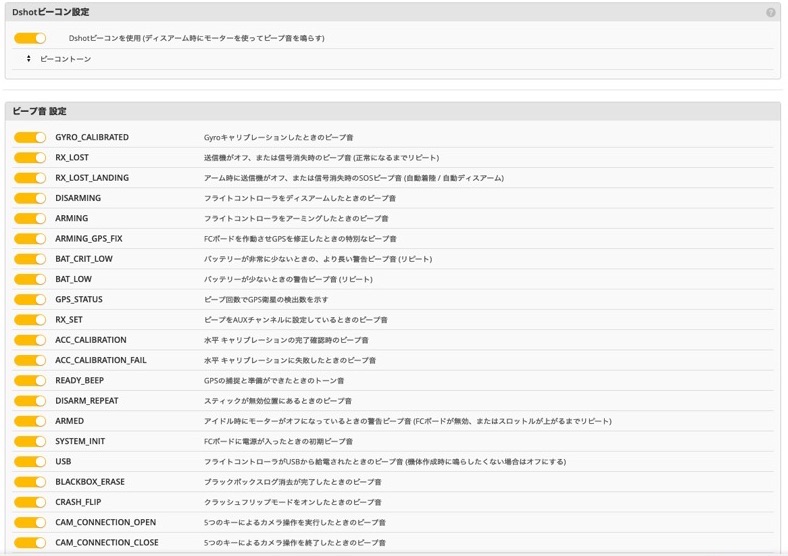
[Dshotビーコン設定]をオン設定に変更しました。
[ビープ音 設定]はデフォルトで全てオン設定になっていますが特に問題ないですね。
電源・バッテリー設定!
バッテリー容量を250mAhに設定しました。
HVバッテリー使用がメインとなりそうなので最大電圧を4.5に上げ、警告電圧及び最小電圧を少し下げました。
あとは飛ばしながら微調整していけばいいと思います。

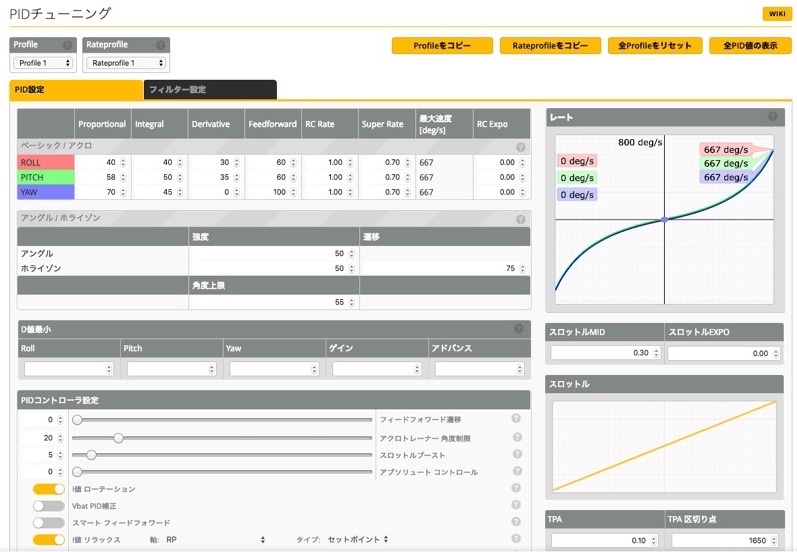
PIDチューニング!
デフォルトで設定されているPID設定は以下の1つのみです。
設定は普段飛ばされている機体を参考にお好みで設定してみて下さい。
このSnapper6がはじめての機体という方は、特に変更する必要はないと思います。
機体とのバインド!
ここまで設定ができたら機体と送信機のバインド作業に移ります。
USB接続のみでバインド作業はできます。(バッテリー接続の必要はありません)
USB接続し電源が供給されている状態でBINDボタンを押すとFCがバインドモードに入るので(FCのLEDが点滅から点灯に変わる)、送信機の[BIND]ボタンを押しバインドします。

送信機とのバインドが完了したら、一旦USB接続を解除し電源オフ後、もう一度Betaflightに接続し他の設定をしていきます。
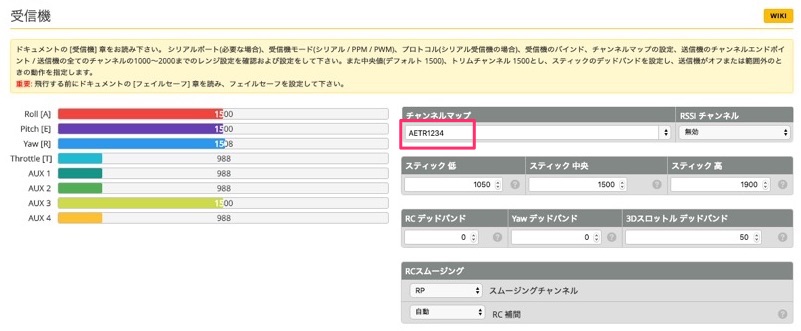
受信機設定!
送信機とのバインド作業が完了したら次に【受信機】タブへと移ります。
チャンネルマップをAETR1234に設定して完了です。(ここではFC内蔵受信機がFrskyで説明しています。)
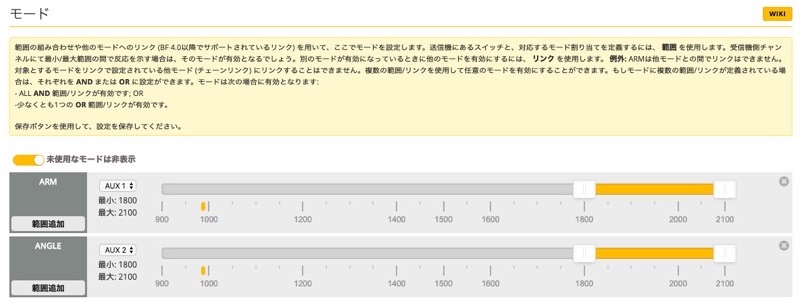
モード設定!
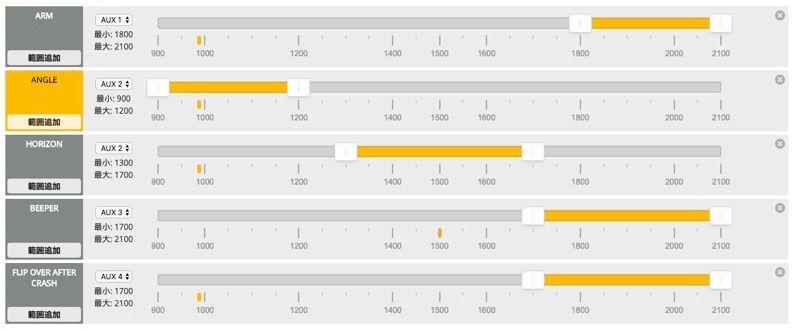
初期状態ではARM・ANGLEのみが設定されています。
最低限の設定、BEEPER(ブザー)やFLIP OVER AFTER CRASH(タートルモード)などを追加しました。
OSD設定!
こちらはお好みで設定して下さい!

設定データの保存!
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
BLHeliでモーターReversed設定&ペラの入れ替え!
上記Betafilghtでの設定で[モーター回転方向を逆転]設定にしたのでBLHeliでモーターにReversed設定をかけます。
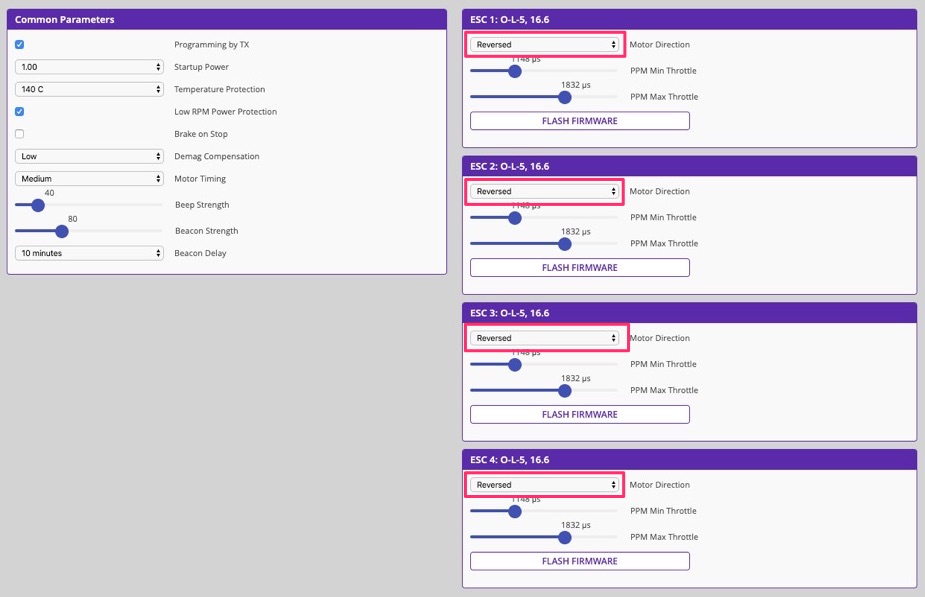
BLHeliの設定が完了したらペラを入れ替えて完了です。

まとめ!
以上、Happymodel Snapper6でのBetafilght設定をやっていきました。
機体構成的にはUR65やUS65と同様なので1セルブラシレスWhoopとしては飛ばしやすい機体だと思います。
そして、フレームやモーターの変更などカスタマイズでいろいろ楽しめる機体だと思います。

アルミダクトを採用した機体を試してみたくこのSnapper6を選びましたが、意外とこのアルミダクトって重いんですね!
1セル機で重量が増す事を考えるとUS65の方に軍配が上がるのでしょうかね?
まぁ、フレームを交換しちゃえばUS65とほぼ変わらないんですけどね!



コメントを残す