
【←前の記事へ】
【はじめてのOpenTX ②】送信機の初期設定!【Taranis X9 Lite Pro】
【次の記事へ→】
【はじめてのOpenTX ④】オリジナルの起動画面を設定&各スイッチに音声を割り当てる!(Amber Sound Packの導入)【Taranis X9 Lite Pro】
前回の記事『【はじめてのOpenTX ②】送信機の初期設定!』の続きとなります。
日本での技適取得が確定しているOpenTX搭載送信機Taranis X9 Lite Proで設定作業を進めていますが、今回は機体を飛ばすためのモデルデータの作成を行います。

その前に、OpenTX Compaoionのインストールや送信機ファームのアップデート、送信機の初期設定がまだお済みでなければこちらの記事も参考にしてみて下さい!


モデルデータの作成は送信機本体のみで行うことも可能ですが、今回はPCにインストールしたOpenTX Companion経由でモデルデータの作成を行っていきます。
何度かモデルデータの作成を行い慣れてくれば送信機のみで作成や送信機内のデータをコピー&修正して他の機体のモデルデータの作成を行うこともできます。
しかしマッサラな状態から送信機内でモデルデータを作成するには少し手間で(PC上のOpen TX Companionを使った方が操作的に楽)、またこの記事をご覧の方はこれからOpenTX搭載送信機を使っていこうという方が多いと思いますので、今回はOpenTX Companion経由でモデルデータの作成を行っていこうと思います。
【はじめてのOpenTX ③】モデルデータの作成!
まずは送信機をブートローダーモードで起動します。
ブートローダーモードでの起動方法は、Taranis X9 Lite Proの場合、左右のトリムスイッチを内側に倒した状態で電源ボタンを1度押します。

送信機のディスプレイにこの画面が出てくるのでPCとUSB接続し、OpenTX Companionを起動します。


[送信機から機体モデルや設定を読み込む]をクリックし送信機内にあるモデルデータを読み込みます。
まだ一度もモデルデータの作成をしていないのでデフォルトのモデル01のみの状態です。

ここではTaranis X9 Lite Proを例に説明を進めていきますが、基本OpenTX搭載の他の送信機でも同様の手順で進めていけば問題ありません。
ここから新しいモデルデータを作成していきます。
空いているインデックス2をダブルクリックして新しいモデルデータを作成していきます。
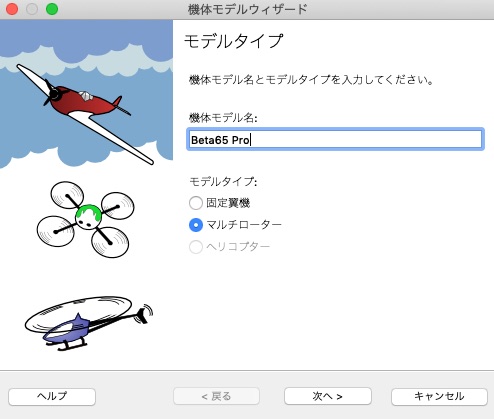
機体モデル名を入力し、[マルチローター]を選択し次へ進みます。
次にコントロールチャンネルの設定です。
前回の『【はじめてのOpenTX ②】送信機の初期設定!』で、チャンネルマップのデフォルトをAETRに設定したのでその設定で進めていきます。
基本的にAETRの設定がいいかと思います。
はじめての場合、AETR?と思われるかもしれませんが、このAETRとは、A(Aileron:エルロン)E(Elevator:エレベーター)T(Throttle:スロットル)R(Rudder:ラダー)のドローンの基本動作を意味します。
AETRとは、この順番でチャンネルマップが設定されます。
| チャンネル1(CH1) | A(Aileron:エルロン)ロールとも言います。 |
| チャンネル2(CH2) | E(Elevator:エレベーター)ピッチとも言います。 |
| チャンネル3(CH3) | T(Throttle:スロットル) |
| チャンネル4(CH4) | R(Rudder:ラダー)ヨーとも言います。 |
この順になっているかと思いますが一応確認後、問題なければ次へ進みます。

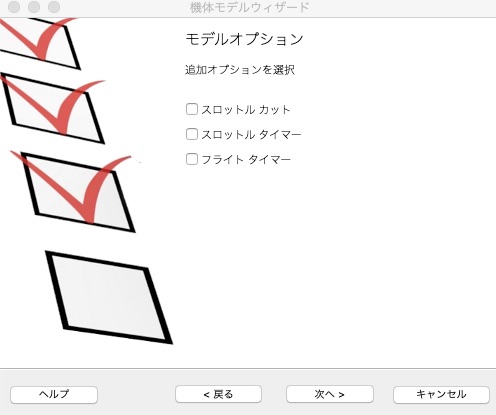
次に追加オプションの設定ですが、今回は基本的な最低限の設定のみに限定したいと思うのでここはスキップして次に進みます。(もちろん後で設定することは可能です)
[OK、承知しました]にチェックを入れて完了です。
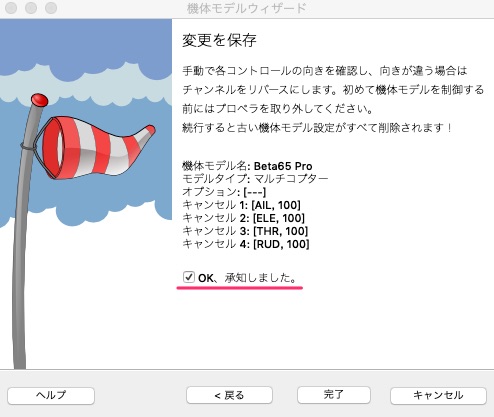
作成した(ここでは機体名をBeta65 Proとしました)モデルデータがリストに追加されています。

モデルデータの編集!
次に上記作成したモデルデータを編集(送信システムやミキサーの設定等)をしていきます。
先程作成したモデルデータをダブルクリックしモデルデータの編集を行います。
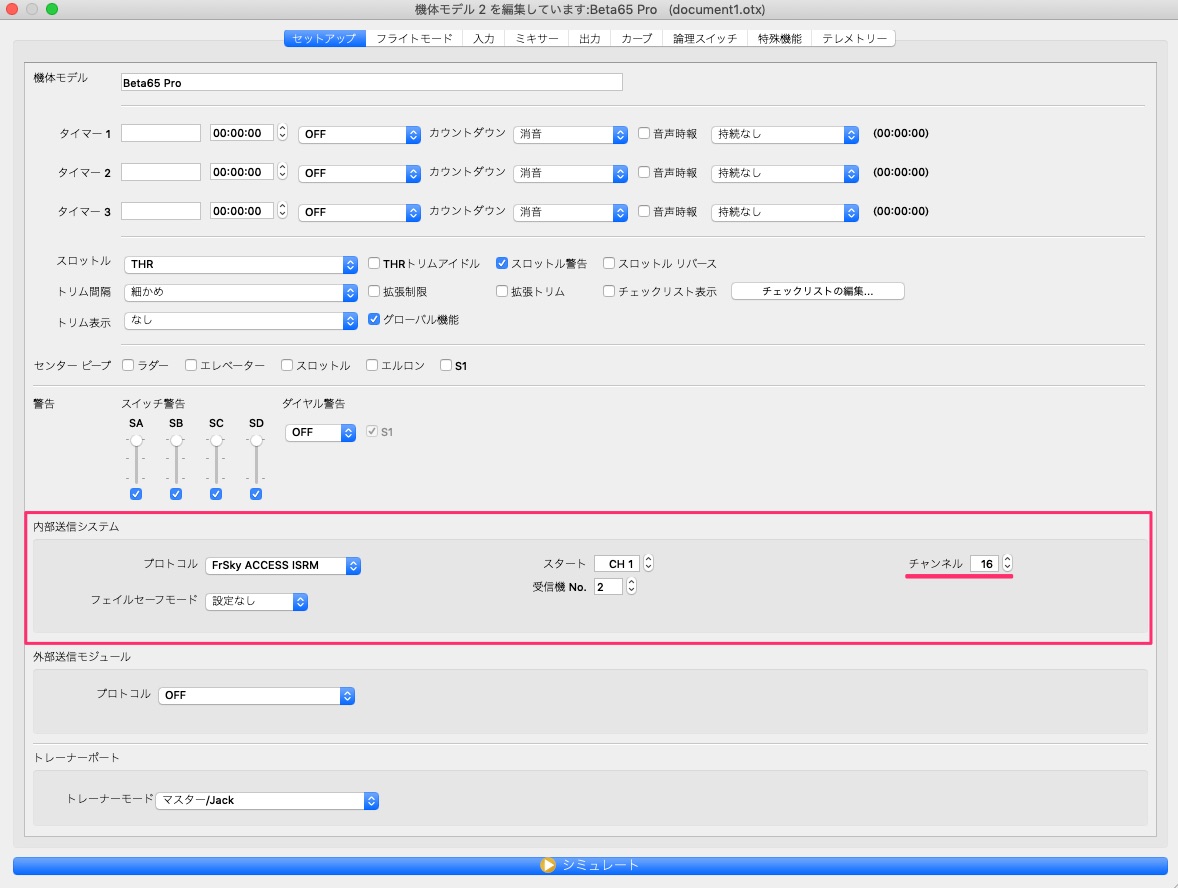
[セットアップ]タブ
機体によって設定は変わってくると思いますが、これがはじめてのモデルデータの作成という方は基本的にデフォルト状態で問題ないかと思います。
[内部送信システム]の項目は機体に取り付けてある受信機(レシーバー)によって変わってきますが、Frsky受信機の場合Frsky D8かFrsky D16になります。
今回はFrsky D16に変更したため[チェンネル]部分を16に設定。
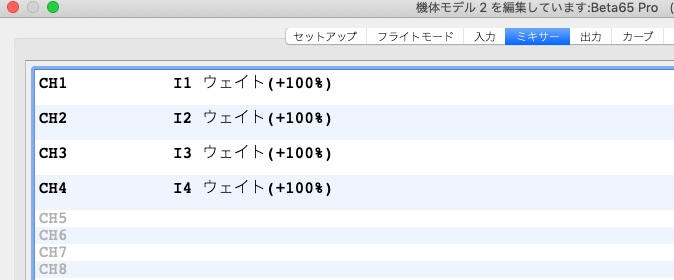
[ミキサー]タブ
次に[ミキサー]タブに移りミキサー設定をしていきます。
ここでミキサーとは簡単に言うと送信機に付いたスイッチ(3ポジションスイッチや2ポジションスイッチ、ポテンショメーターなど)にいろいろな機能を割り当てて行く作業です。(それ以外もありますがここでは分かりやすくそう解釈して問題ないかと思います)
送信機のスイッチにはSAやSB、SCなど名前が割り振られています。
今回Taranis X9 Lite Proを例に設定を進めています。
Taranis X9 Lite Proのスイッチの名称はこのようになります。(お使いの送信機のマニュアルを参考にして下さい!)

ここではドローン操縦に最低限必要な基本的な機能である、ARM(アーム)とBEEPER(ブザー)、フライトモード(Angle・Horizon・Acro)をスイッチに割り振っていきます。
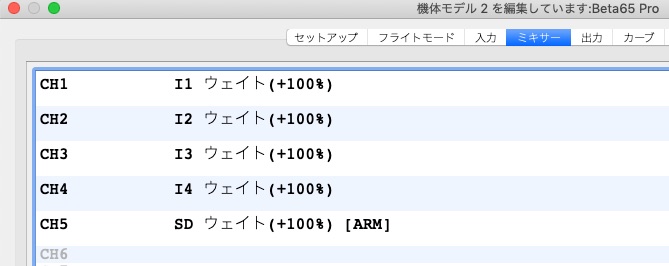
まずは空いているCH5にARMを割り振ってみます。
CH5をダブルクリックで設定していきます。
[名称]は分かりやすいようにARMとし、[ソース]にSDスイッチ(送信機左肩にある2ポジションスイッチ)に割り当てました。

これでCH5にSDスイッチが割り当てられました。
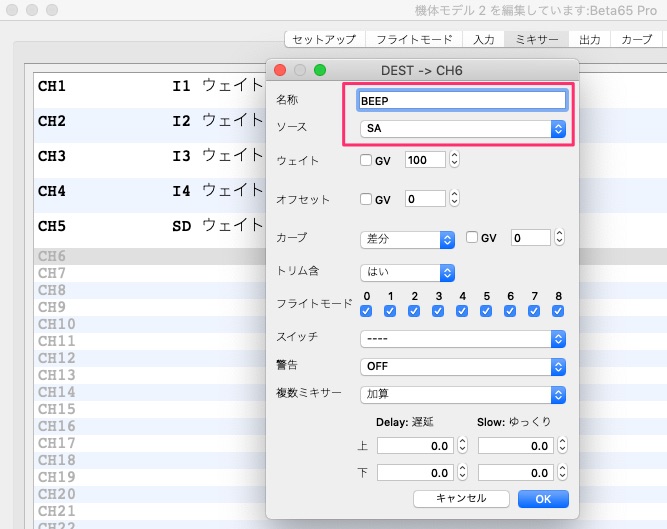
次にBEEPER(ブザー)をSAスイッチに割り当ててみます。(CH6使用)
そして同様にフライトモードをSCスイッチに割り当てます。(CH7使用)

以上、アームとブザー、フライトモードを送信機のスイッチに割り振ることができました。
スイッチの割り当ては一例ですので他の機能を割り当てたり、今回設定したのとは違うスイッチに割り当てることももちろん可能です。

これで飛ばすための最低限の設定はできたと思います。
モデルデータの作成が完了したら[保存]しておくのをお忘れなく!
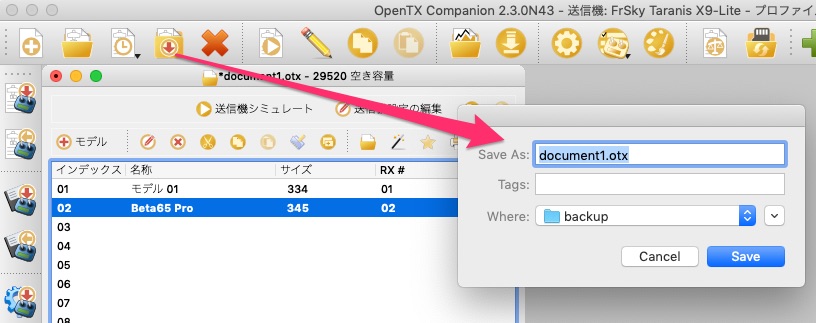
最後に作成したモデルデータを送信機に書き込みます。
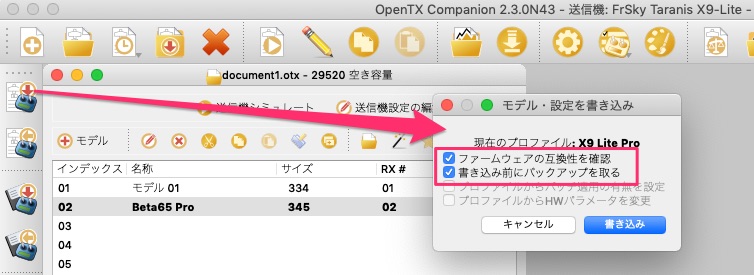
送信機にモデルデータが作成されているのを確認して完了となります!

【追記】ポテンショメーター:S1スイッチにボリュームを設定!
最低限の設定ということでアーム・ブザー・フライトモードを送信機のスイッチに設定しました。
そしてTaranis送信機には音声を読み上げる機能があり、テレメトリー情報を音声で読み上げたりスイッチが押されると設定した音声を出力することが可能です。
しかしデフォルトで収録されている音声は非常に少なく、「アームオン」「アームオフ」や「アングルモード」「アクロモード」など今回スイッチ割り当てに対応した音声が収録されていません。
私はデフォルトより圧倒的に音声収録数が多いアンバーサウンドパック(Amber sound pack)というものを入れています。
スイッチ操作時に「アングルモード」や「アクロモード」など音声が流れる設定にしておけば送信機が大変使いやすくなります。
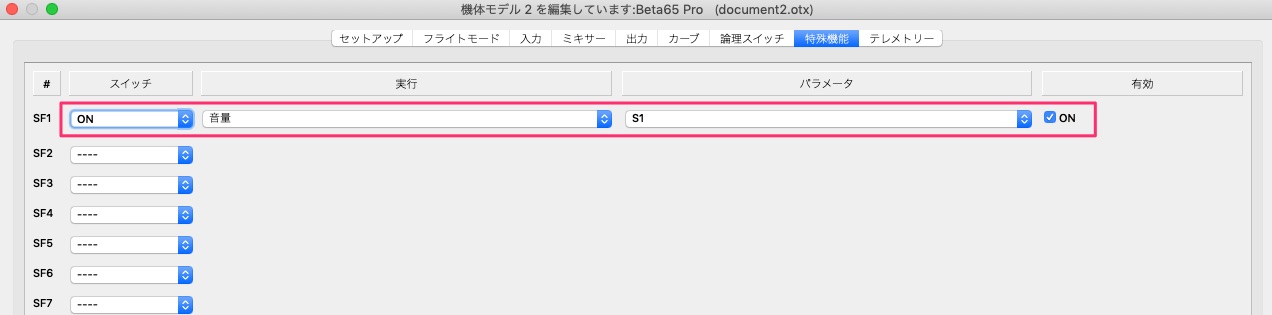
今回は少し長くなってしまうので省略させてもらいますが、音声やスイッチ操作時のBEEP音などを調節できるようにポテンショメーター:S1スイッチ(クルクル回すスイッチ)に設定しました。
Taranis送信機はよく喋るため、野外で飛ばしている時にテレメトリー情報が大音量で流れる・・・なんて時に簡単にボリューム調整ができ便利ですよ!
設定は簡単です!
モデルデータ内の[特殊機能]の項目に以下の設定をすれば完了です。
まとめ!
今回、必要最低限の機能に限定しモデルデータの作成方法を見ていきましたが、これがはじめてのモデルデータの作成という方にはチャンネル?ミキサー?となかなか取っ付きにくい部分が多く大変かと思います。
送信機にモデルデータを作成し、これで送信機が使える状態になりました。
次は機体のFC(フライトコントローラー)の設定(Betaflight設定)をやってみたいと思います。
ドローンを飛ばすための準備、ホント大変ですね!
【←前の記事へ】
【はじめてのOpenTX ②】送信機の初期設定!【Taranis X9 Lite Pro】
【次の記事へ→】
【はじめてのOpenTX ④】オリジナルの起動画面を設定&各スイッチに音声を割り当てる!(Amber Sound Packの導入)【Taranis X9 Lite Pro】
 【はじめてのOpenTX ④】オリジナルの起動画面を設定&各スイッチに音声を割り当てる!(Amber Sound Packの導入)【Taranis X9 Lite Pro】
【はじめてのOpenTX ④】オリジナルの起動画面を設定&各スイッチに音声を割り当てる!(Amber Sound Packの導入)【Taranis X9 Lite Pro】  2セルWhoopでも部屋でビュンビュン飛ばそう!ポテンショメーターに最大スロットル値を可変で変えられる設定をしてみた!【Taranis】
2セルWhoopでも部屋でビュンビュン飛ばそう!ポテンショメーターに最大スロットル値を可変で変えられる設定をしてみた!【Taranis】  【Frsky Taranis X9 Lite Pro】ホールセンサージンバル搭載で最新のACCESSプロトコル対応!日本での技適取得も完了したようです!
【Frsky Taranis X9 Lite Pro】ホールセンサージンバル搭載で最新のACCESSプロトコル対応!日本での技適取得も完了したようです!  【OpenTX】はじめてのOpenTXまとめ!
【OpenTX】はじめてのOpenTXまとめ!  【はじめてのOpenTX ②】送信機の初期設定!【Taranis X9 Lite Pro】
【はじめてのOpenTX ②】送信機の初期設定!【Taranis X9 Lite Pro】  はじめてのプロポは高機能&低価格 Taranis Q X7Sに決定!付属プロポより格段に操作性がアップ!【Tiny Whoop】
はじめてのプロポは高機能&低価格 Taranis Q X7Sに決定!付属プロポより格段に操作性がアップ!【Tiny Whoop】  【はじめてのOpenTX ①】OpenTX Companionインストール&ファームのアップデート!【Taranis X9 Lite Pro】
【はじめてのOpenTX ①】OpenTX Companionインストール&ファームのアップデート!【Taranis X9 Lite Pro】  【Taranis X9 Lite Proカスタマイズ】USB充電モジュールを導入![URUAV TM-Charger Board 5V 10W Built-in Charger Module]
【Taranis X9 Lite Proカスタマイズ】USB充電モジュールを導入![URUAV TM-Charger Board 5V 10W Built-in Charger Module]

コメントを残す