
65mm Whoopってやっぱいいですね!
そしてMeteor65やMobula6などいまだ進化し続けていますが、今回はEachine UZ65の話となります。
65mm Whoopでは初となる35mmペラを採用した機体となります。
ようやくですが私の元にも届いてくれ楽しんでおります。

普段65mm WhoopといえばいまだにUS65が大好きでメイン機として飛ばしていますが、飛ばし比べてみるとその差は歴然!
個人的にMeteor65より機体パワーは劣りますが安定感があるUS65派だったのですが・・・この機体なら世代交代してもいいかなぁなんて!(こうなってくると私の元にはいまだに届かないMobula6も試したいところではありますが)
この機体からWhoopはじめる人、ちょっと羨ましい!

インスタなどても最近チラホラと見るようになりましたが、大人気Mobula6と二分する人気機体となるのでしょうか?
今後の動向が気になりますね!
65mm Whoopで通常使われている31mmペラから大きな35mmペラが使われているのが大きな特徴となる機体です。

そのため室内では少し扱いにくいのかな?なんて思っていましたが、デフォルト設定でも問題なく飛ばす事が出来ました。
というか飛ばしやすい!
Meteor65をはじめて室内で飛ばした時は、そのパワーを持て余す感が少しあったのですが、UZ65ではそんな感じはなく素直に飛んでくれるイメージです。
ペラサイズアップでパンチが強い飛びをイメージしていたのですが、スロットルの変化が柔らかく反応してくれる感じでしょうか。(表現が難しいですね!)
これが35mmペラの特徴なんですかね?
Whoop初心者の方でもかなり飛ばしやすい機体となるかと思います。
・・・なんですが、前回機体構成を見ながら書いたのですが、フレームは専用設計されているようでペラやフレームのレパートリーがないのが難点です。
そしてかなり小型軽量化されたFCのためモーターはプラグ式ではなくFCにはんだ付けとなっており、モーターやフレーム交換などのメンテナンスは結構大変そうな機体です。
この点はあまり初心者の方には向かない機体になるかと思います。
Betaflight設定を前回ご紹介出来なかったので今回やっていきたいと思いますが、双方向DshotやVTXテーブルなど標準で設定されており、ほぼデフォルト設定でバインドさせてあげれば問題なく飛ばす事ができるのは初心者の方にもありがたいですね。
目次
【Eachine UZ65】Betaflight設定をやってみる!

それではBetaflight設定をやっていきます。
はじめての機体として選ばれる方も多いと思いますので、最低限やった方がいい項目に限定してご紹介したいと思います。
といってもほぼデフォルト設定で問題なく飛ばすことが出来ると思いますが・・・。
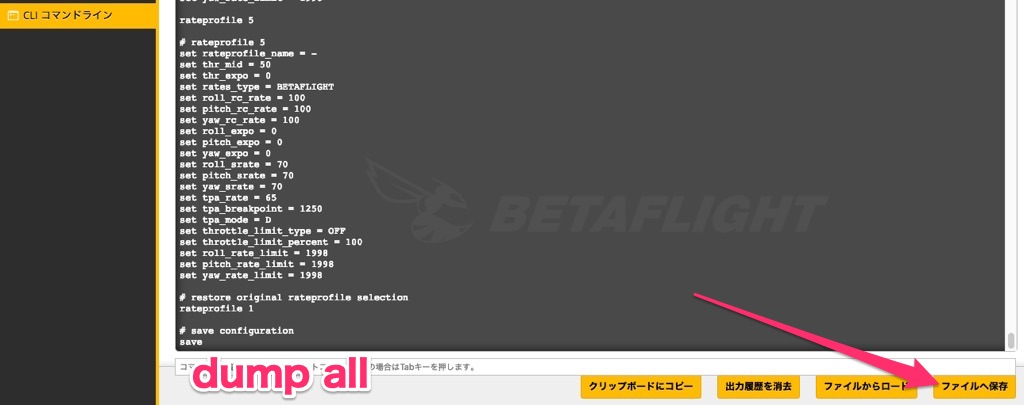
初期状態の設定を保存
まずはBetaflight Configuratorの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
ポート設定
[ポート]設定は特に変更する必要はなさそうですね。

基本設定
標準で[モーター回転方向を逆転]に設定されています。
双方向Dshotも設定されています。(標準のDHOT600のままで進めていきますが特に問題はないようです!)

MOTOR_STOPをOFFに変更しました。

受信機設定はデフォルトのFRSKY_D(D8モード)のままでいきます。
アーム最大角も標準で180°に設定されているので問題ないですね。

その他の設定もこのままで問題ないかと思います。
AIRMODEの常時使用はOFFになっていますが、モードタブでAngle以外のモードでONになるように設定されています。

Dshotビーコン設定をONに変更しました。
後は特に変更する必要はなさそうです。(AIRモードはAngleではOFFになるように設定されています。)

電源・バッテリー
こちらも特に変更する必要はなさそうです。
警告電圧の項目は3.0Vに設定されていますが、数回飛ばしてみましたが屋外で飛ばす時などはもう少し高く設定してもいいかもしれません。(現在私は3.2Vに変更しています)

バッテリー電圧3.0VでOSD画面に警告が出ますが、その後一気に2.7Vくらいまで電圧が下がるようです。
付属バッテリーの性能でしょうか?このあたり少し高めに設定してテストされた方がいいかもしれません。
また、これ少し気になったのですが、警告電圧前後(3.0V前後)までバッテリー電圧が低下するとプロップウォッシュでしょうか?Yawを入れると極端にガクッと機体が落ち込むようになります。(ヨーウォッシュっていうのかな?)
PIDや他の設定項目見直しで改善するか分かりませんが、電圧低下でこのような挙動も出るようなのでバッテリー警告が出たら素直に機体を戻すのがよさそうです。
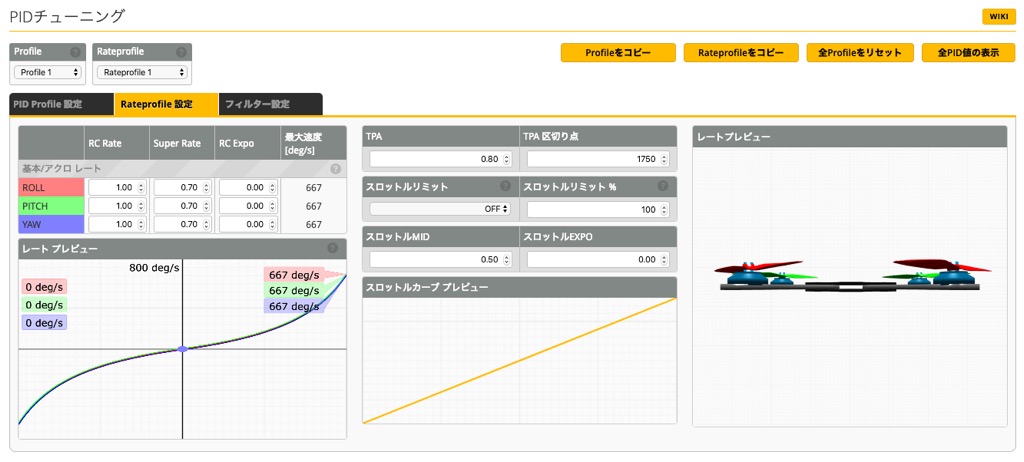
PIDチューニング
こちらがオリジナルのPID Profile及びRate Profileとなります。

フィルター設定。
このあたり全てデフォルト設定のまま。

機体とのバインド
ここまで設定できたら機体と送信機をバインドさせます。
CLIコマンドラインからやってしまいましょう。
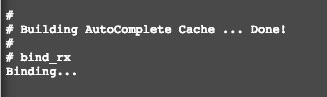
ファームウェアは4.1.1が入っているので、[bind_rx]でバインドモードに入ります。
あとは送信機側もバインドモードに入り機体とバインドして下さい。
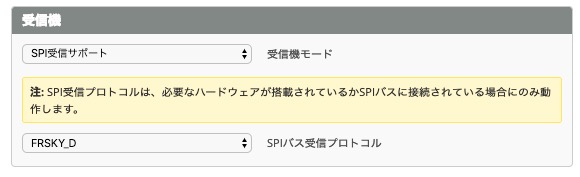
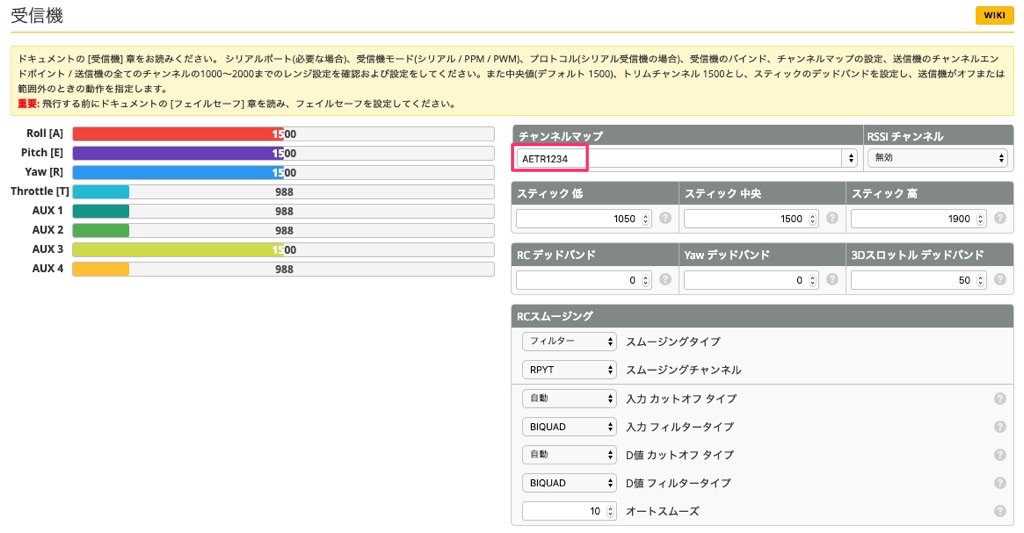
受信機
送信機とのバインドが完了したら次に[受信機]タブへと移ります。
私はFrsky版なので、チャンネルマップを[AETR1234]に変更して完了です。(お使いの受信機に合ったものを選択)
モード
こちらがデフォルトで設定されている項目です。
Angleモード以外でAIR MODEが入るようになっています。
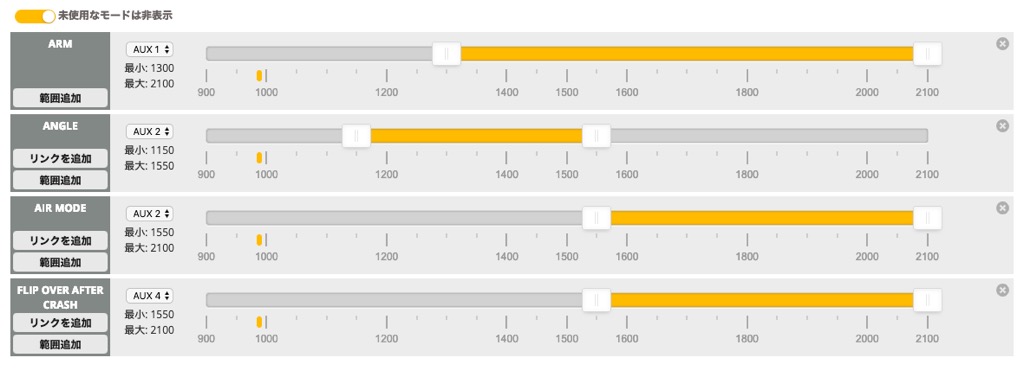
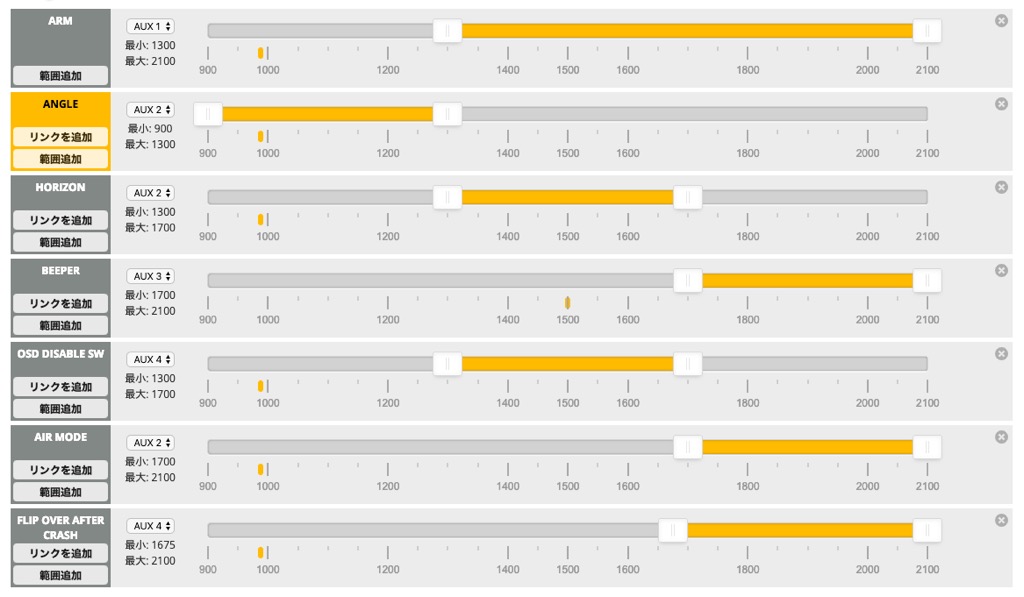
最低限の設定がされているのでこのままでも問題はないのですが、少し項目を追加しました。
普段、[OSD DISABLE SW(OSD画面の文字を消すモード)]なんて設定しないのですが、はじめて使ったRunCam Nano3カメラの映像が予想以上に綺麗だったので一応設定してみました。
OSD
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。

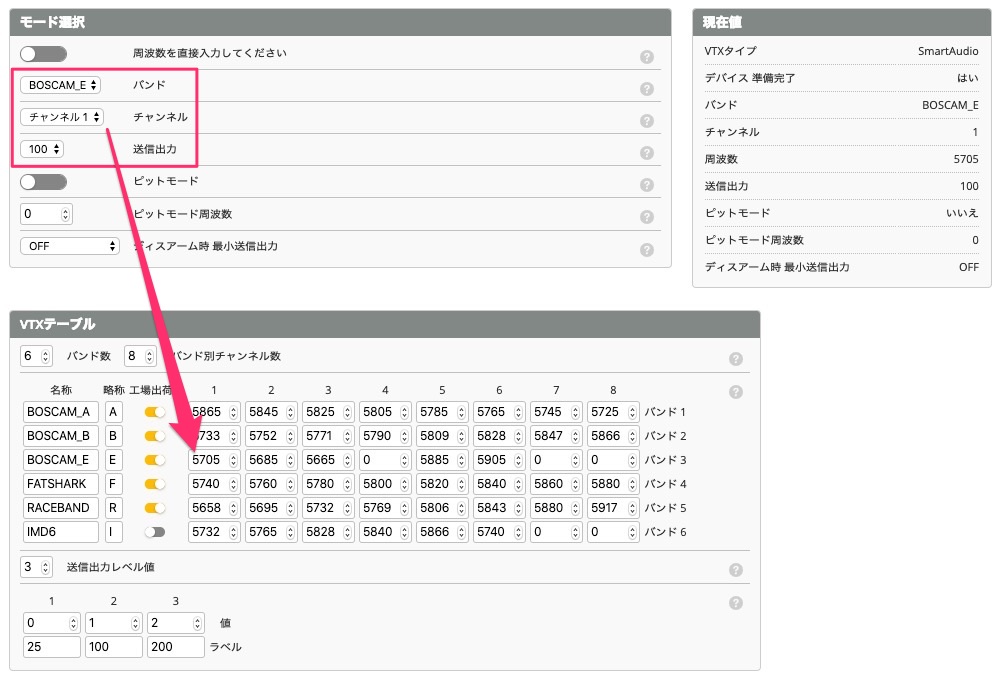
映像伝送用送信機
VTXの周波数設定もやっておきましょう。
Betaflight4.1からVTXテーブルというものが採用されましたが、まだ不慣れという方も多いかと思います。
しかしVTXテーブル自体は初期状態で設定されているので、[モード選択]からお好みの周波数(バンド&チャンネルの組み合わせ)、送信出力を選択するだけなので簡単です!
設定データの保存!
これでBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップ。
差分バックアップを取って完了となります。
BLHeli確認
前回、ブザーの取り付けをやろうかと思いましたがブザーを取り付けるとメンテナンスで機体をバラす際に非常に面倒になりそうな機体なのと、あと冒頭でも書いたのですが室内で飛ばしやすいので私の場合室内メインでの機体と今のところ考えています。
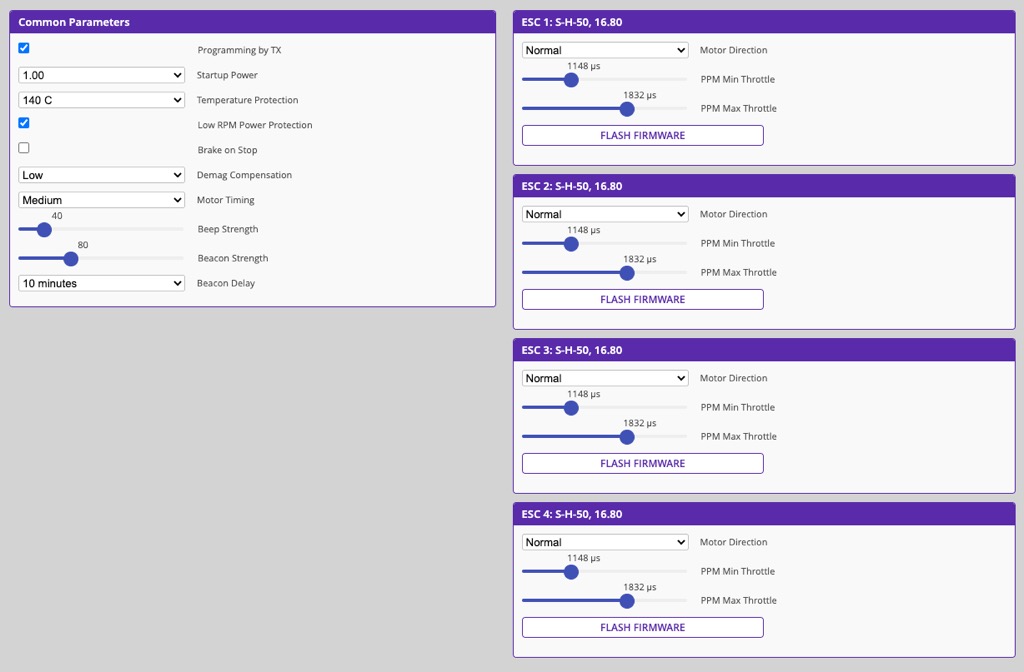
モーターブザーは非常に音が小さいので、必要であれば[Beacon Strength]の項目を上げてみるのもいいかと思います。
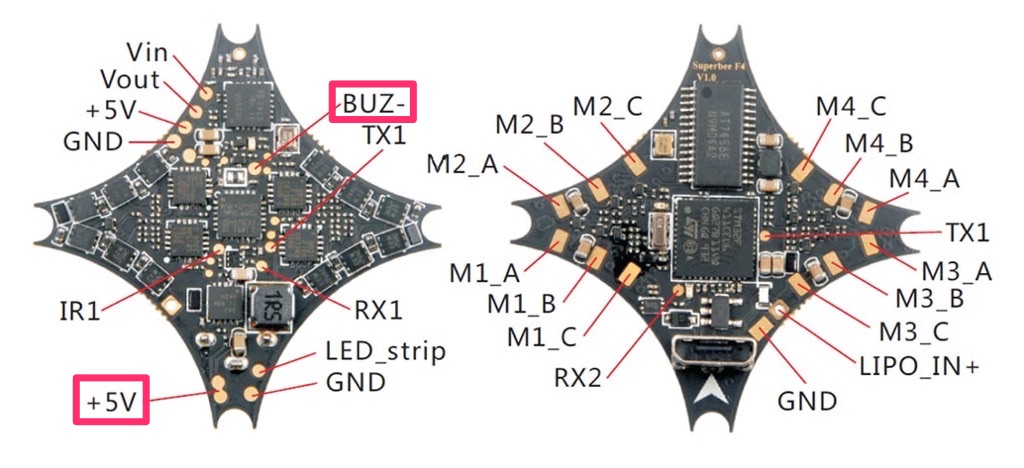
屋外メインでお考えの方はブザーの取り付け自体は簡単なので、こちらを参考に取り付けてみて下さい。
最後に!
Betaflight設定に関しては、ほぼ標準状態で問題なく飛ばすことが出来ると思います。
初心者にもありがたいですね。
あとはお好みでスキルに応じて設定していけばと思います。

警告電圧設定の項目でも述べましたが、バッテリー電圧低下時の挙動が気になりますがここまで電圧が下がればパフォーマンスも落ちているので(スピードなど)素直に下ろした方がよさそうです。
VTXの出力は100mWで飛ばしていましたが、室内飛行で4分程、そして屋外では3分弱といったところでしょうか。
これくらいは飛んでくれるので十分だと思います。
はじめての機体として選んでも飛ばしやすいかと思うので個人的にはおすすめしたいところなんですが、モーターがプラグ式ではなくFCにはんだ付けされているので、故障によるモーター交換やフレーム交換などは結構大変になるかと思います。
その点を踏まえても、個人的にはようやくUS65に変わる機体が登場してくれたということで・・・やったー(^o^)
クーポンコード:BGJPUZ65入力で$85.50→80.75(限定数30 ~6/30)

 Eachine UZ65スペアパーツいろいろご紹介!ペラ&フレームのストックは必須ですね!
Eachine UZ65スペアパーツいろいろご紹介!ペラ&フレームのストックは必須ですね!  Eachine UZ65を1日飛ばしてみたけど・・・この機体飛ばしやすくてかなりいいぞ!
Eachine UZ65を1日飛ばしてみたけど・・・この機体飛ばしやすくてかなりいいぞ!  【Eachine UZ65】35mmペラ採用の世界初65mm Whoop。65機ってまだ進化の余地があったんですね!
【Eachine UZ65】35mmペラ採用の世界初65mm Whoop。65機ってまだ進化の余地があったんですね!  Eachine UZ65がプレオーダー開始!クーポンコード頂いたのでご紹介!
Eachine UZ65がプレオーダー開始!クーポンコード頂いたのでご紹介!  海外物流も正常に戻りつつあるのかな?いろいろ届きました!そして気になる機体Eachine UZ65、Emax Tinyhawk Ⅱ RACE、Eachine Tyro89などの話も少し!
海外物流も正常に戻りつつあるのかな?いろいろ届きました!そして気になる機体Eachine UZ65、Emax Tinyhawk Ⅱ RACE、Eachine Tyro89などの話も少し!  【Eachine UZ65】Mobula6の対抗馬?Eachine UZ65が登場!気になる機体です!
【Eachine UZ65】Mobula6の対抗馬?Eachine UZ65が登場!気になる機体です! 

コメントを残す