
いやぁ〜1セルToothpick『BETAFPV HX100 SE』、メチャ楽しいっすねー!
新規格のBT2.0コネクタが採用されているためバッテリーやピッグテール等々まだ手元に対応したものがあまりなく四苦八苦しておりますが、1セルでこれだけ飛んじゃうともう楽しくないわけがなく・・・
他社の後発機も続々出てくるんでしょうね?

今回、このHX100 SEのBetaflight設定をやっていこうと思います。
しかし、ほぼデフォルト状態で問題ないかと思います。
飛ばしてみた感覚で言うと2セル機に近い飛びですかね、レートも2セル機に近い設定に変更しました。
機体重量に対してパワーがあるためスピードを上げる際にピッチで機体を傾けてスロットル入れると機体が浮き上がってしまい・・・
また機体が軽すぎるためかなかなか落ちてこなく・・・
このあたり調整なんでしょうが、どう調整してやればいいのだろうか?
とりあえず機体バランスを取るという意味で容量が大きい(少し重い)バッテリーでも飛ばしてみました。
また標準で取り付けられている25°のカメラマウントでは非常に飛ばしにくく付属の35°のものに変更しました。
このあたりBetaflight設定とともに見ていきましょう。
目次
【BETAFPV HX100 SE】Betaflight設定&機体バランスについて少し検証!

機体バランスについて検証!
Betaflight設定の前に少し機体バランス調整についてです。
こちらはほぼデフォルト設定での初飛行の動画です。(下手すぎますがご了承下さい)
冒頭あたりは、「これ1セルなの?」なんて少し戸惑っておりますが・・・
約29gの機体重量となりますが付属の300mAhバッテリーでは機体が軽すぎパワーがあるため、スロットルを入れると機体が浮いてしまいピッチとスロットルの調整が上手くいかずなかなか思うようにスピードが出せませんでした。
これは私の技量不足が大きいところです。
また機体が軽いため上がった機体がなかなか降りてこなくて。
普段Beta85Xでよく練習していますが、ある程度の機体重量があるためエアーモードをオンにしモーターアイドルスロットル値も6.5〜7.0あたりまで上げると機体バランスが取れトリックなども入れやすい飛びとなる印象です。
このHX100 SEくんも上手く調整してあげたいのですが・・・機体バランスを取るという意味合いで少し容量の大きい(重い)450mAhバッテリーで飛ばしてみると上記気になる点が解消され飛ばしやすくなりました。
飛ばす方の技量に大きく左右される部分なのでどういう調整方法がベストなのか分かりませんが、今の私のスキルでは少し機体重量を上げる方が飛ばしやすくなる印象です。
で、このブログを書いている最中にMr ShutterBugさんが面白い動画をアップされました。
同じ機体でも1セルでは有り得ない?スピードで飛ばされているのに驚きです!
また動画後半ではGNB 450mAhバッテリーでの飛びも検証されていました。
バッテリー電圧の表示が改善されるような事も言われていますね。
なかなか興味深い内容で勉強になります。
私が使ったのはEmax 450mAhバッテリーとなります。
ピッグテールもPH2.0からBT2.0コネクタに付け替えています。

標準の300mAhバッテリーからは重量が約5gほど重くなりますが、機体バランス的には飛ばしやすくなる印象です。

Betaflight設定!
では本題のBetaflight設定を見ていきます。
ほぼデフォルト設定で問題なく飛ばせると思います。
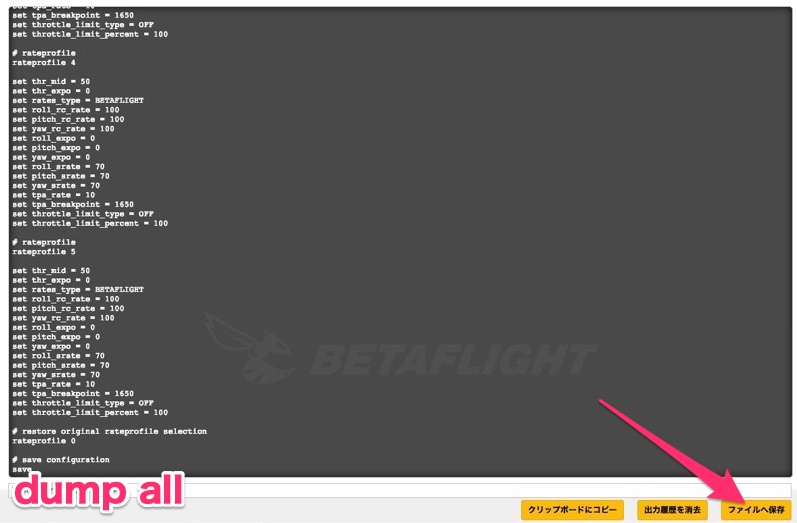
初期状態の設定を保存!
まずはBetaflightの【CLIコマンドライン】から[dump all]で初期状態の設定を保存しておきます。
ポート設定!
[ポート]設定はデフォルトで特に問題いですね。

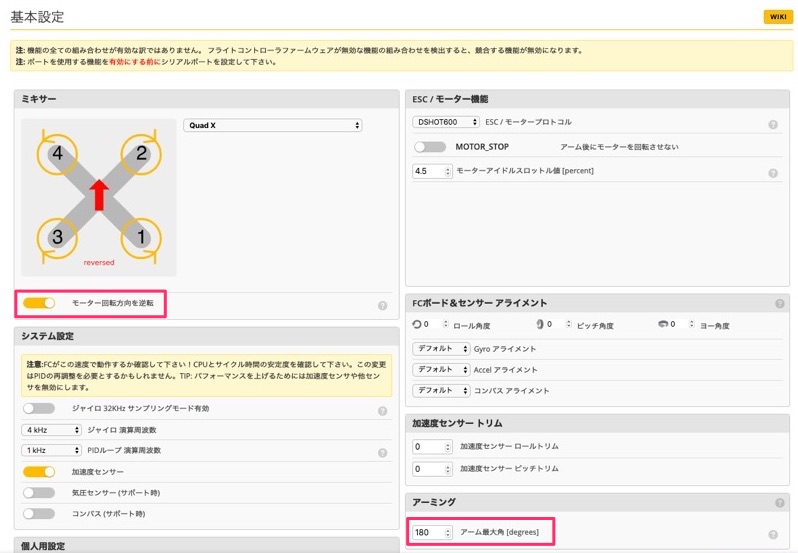
基本設定!
[モーター回転方向を逆転]設定に変更しました。
初飛行ではノーマル状態で飛ばしましたがWhoop形状の機体と違いToothpickではこの設定にする必要はないように思いますが、ペラの向きを他の機体と統一するという意味合いでこの設定にしました。
[アーム最大角]もデフォルトで180°に設定されているので問題ないですね。
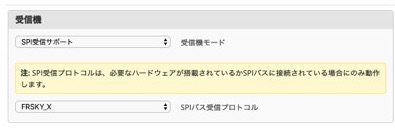
[受信機設定]FRSKY_Xも問題ないですね。
[エアーモードを常時使用]はON設定になっています。
ほぼデフォルトのままで問題なさそうです。

電源・バッテリー!
HVタイプのバッテリー使用がメインなので最大電圧の項目を4.4から4.5Vに上げました。
バッテリー警告電圧はデフォルトで3.4Vに設定されています。

普段3.1Vあたりまで下げていますが、BT2.0バッテリーでは少し高めのデフォルト値3.4Vのままがいいのかな?
少し気になる墜落がありました。

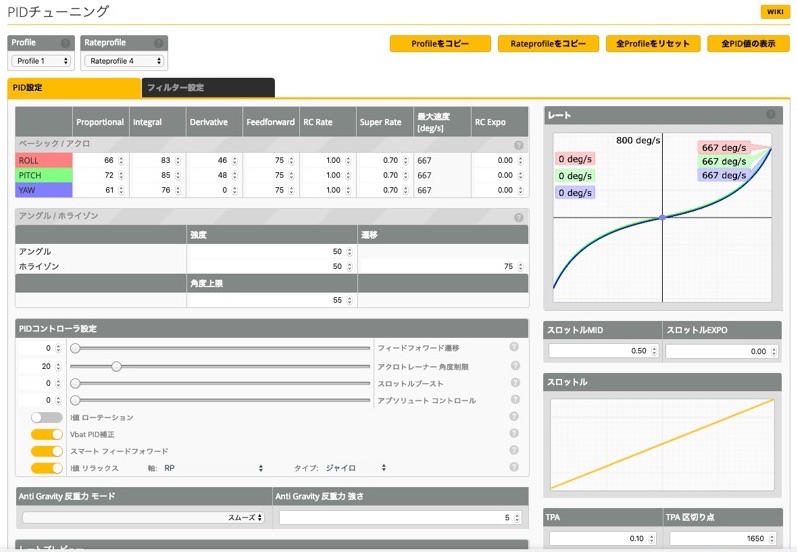
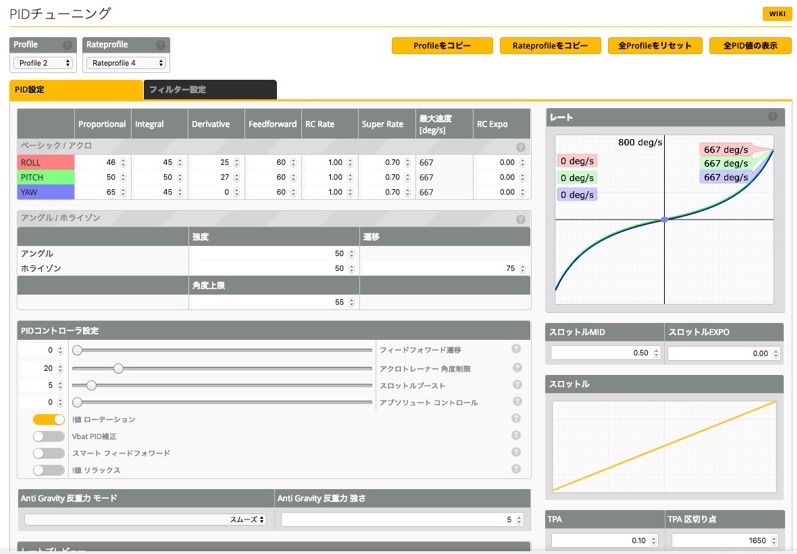
PIDチューニング!
PIDは2パターン用意されています。
機体とのバインド!
ここまできたら機体と送信機をバインドさせます。
機体底面からFCのバインドボタンを押すとLEDが点滅しバインドモードに入ります。

バインドが完了したら再びBetaflight設定に戻ります。
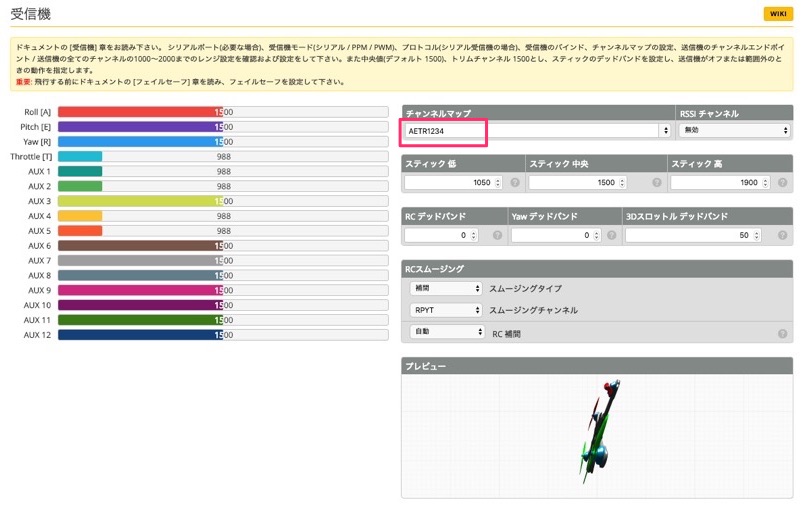
受信機!
送信機とのバインドが完了したら次に【受信機】タブへと移ります。(Frsky受信機内蔵FCの場合)
特に問題なさそうです。
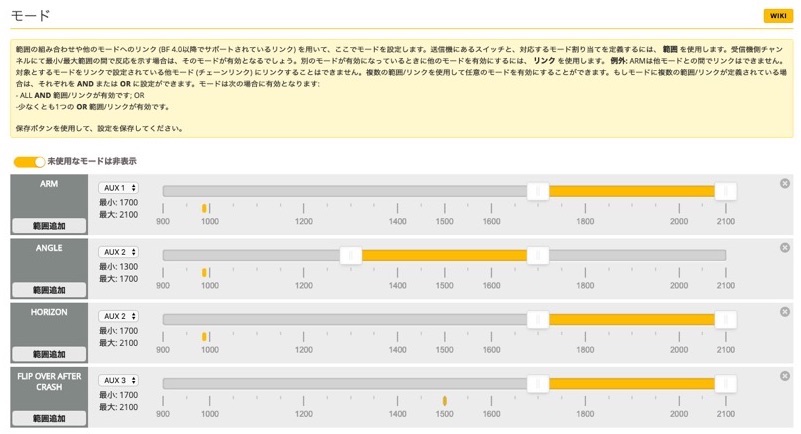
モード!
こちらがデフォルト状態で設定されている項目です。
特にこのままで問題ないですが、BEEPERを追加しました。
OSD!
こちらはお好みで設定して下さい。
いつも私はこんな感じで設定しています。

VTXのBand&Channelの設定!
VTXのBandとChannelも設定しておきます。
【CLIコマンドライン】から設定。
set vtx_channel=1
set vtx_freq=5705
save
設定データの保存!
これでBetaflightでの最低限の設定は完了です!
これまでの設定変更内容を[CLIコマンドライン]から保存しておきます。
diff allで差分バックアップを取って完了です。
BLHeli設定!
Betaflightで[モーター回転方向を逆転]設定に変更したのでペラの付替及びBLHeliからモーター回転方向の変更をします。

まとめ!
BETAFPV HX100 SEのBetaflight設定をやっていきました。
特にデフォルト状態で問題なく飛ばせるかと思います。

1セルとは思えない飛びを見せてくれる非常に面白い機体です。
1セルでこれだけ飛んじゃうと・・・いい意味で困ったものです!
また1つ新しい当たり機体を手に入れました。
もう1機予備機を手に入れるかMeteor65にするか、来月発売のMobula6にするか・・・いろいろと考えております。
1セルでこれだけ飛んでくれると面白くないわけがなく、1セル機がまた楽しくなってきました。
 軽量2セル機、かなりいいかも!いや3セルでもいけちゃうんだよなぁ〜!
軽量2セル機、かなりいいかも!いや3セルでもいけちゃうんだよなぁ〜!  1セルToothpickが楽しくて構成変えてもう1台作ってみました。軽量2セルや3セル機としても面白そうです!
1セルToothpickが楽しくて構成変えてもう1台作ってみました。軽量2セルや3セル機としても面白そうです!  いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】
いろいろあったHX100 SEくんですが、ようやく構成が落ちつきました!【1S Toothpick】  Emuflightのテストしたかったのに・・・!FC内蔵受信機でRX LOSS頻発、野外機は受信機増設が必須かな?
Emuflightのテストしたかったのに・・・!FC内蔵受信機でRX LOSS頻発、野外機は受信機増設が必須かな?  HX100 SEが面白すぎて2号機を作ってしまいました!
HX100 SEが面白すぎて2号機を作ってしまいました!  【BETAFPV HX100 SE】ほんとよく飛んでくれる1セルToothpickです!トラブル解決したのでグルングルン回してテスト飛行してきました。
【BETAFPV HX100 SE】ほんとよく飛んでくれる1セルToothpickです!トラブル解決したのでグルングルン回してテスト飛行してきました。  【BETAFPV HX100 SEカスタマイズ 】C01 Proカメラ&Diamond VTXにカスタマイズ!したのですが・・・接続切れ続出!
【BETAFPV HX100 SEカスタマイズ 】C01 Proカメラ&Diamond VTXにカスタマイズ!したのですが・・・接続切れ続出!  【BETAFPV HX100 SEカスタマイズ】 Meteor65に続きHX100 SEもC01 Proカメラにカスタマイズ!
【BETAFPV HX100 SEカスタマイズ】 Meteor65に続きHX100 SEもC01 Proカメラにカスタマイズ!  1セルToothpickが楽しい!80mmサイズの可愛い1セルToothpickを作ってみた!
1セルToothpickが楽しい!80mmサイズの可愛い1セルToothpickを作ってみた!  【BETAFPV HX100 SE FPV Quad】新規格BT2.0コネクタ採用BETAFPVの新しい1セルToothpick HX100 SEがやって来た!
【BETAFPV HX100 SE FPV Quad】新規格BT2.0コネクタ採用BETAFPVの新しい1セルToothpick HX100 SEがやって来た!  手持ちのバッテリーをBT2.0化!好みのバッテリーのBT2.0化が良さそうです!
手持ちのバッテリーをBT2.0化!好みのバッテリーのBT2.0化が良さそうです!  既存バッテリーのBT2.0プラグ化をやってますが、完全に内職ですね!
既存バッテリーのBT2.0プラグ化をやってますが、完全に内職ですね!  【Eachine US65】US65のピッグテールをBT2.0に変更、フレームもMeteor65仕様にしてみました!
【Eachine US65】US65のピッグテールをBT2.0に変更、フレームもMeteor65仕様にしてみました!  【Emax Tinyhawk】1セルTinyhawkのピッグテールをBT2.0コネクタに変更!まずはこの機体からでしょう!
【Emax Tinyhawk】1セルTinyhawkのピッグテールをBT2.0コネクタに変更!まずはこの機体からでしょう!  1セルWhoopのBT化も完了し近場でサクッとお手軽練習が楽しい!
1セルWhoopのBT化も完了し近場でサクッとお手軽練習が楽しい!  ブラシ機もBT2.0化がいい感じ!手持ち機体のBT2.0化がほぼ完了しました。
ブラシ機もBT2.0化がいい感じ!手持ち機体のBT2.0化がほぼ完了しました。 

コメントを残す