
前回『【BETAFPV Beta85 Pro2 先行レビュー】1103モーターにアップしたBeta85 Pro2!以前同じ構成で機体を組んで検証した事があるのですが・・・その飛びはいかに!【Shutterbug85】』の続きとなります。
今回はBeta85 Pro2を飛ばすにあたりバインドから最低限のBetaflight設定をご紹介したいと思います。
ちょっとその前に・・・前回も少しお話ししたのですが、このBeta85 Pro2をテスト用に頂いた時、正直あまりいい印象を持っていませんでした。
というのもこのBeta85 Pro2はMr ShutterBug氏の以下の動画をコンセプトに作られているという話をメーカーの方からお伺いしました。
https://youtu.be/4uhbz7J9rH0
私もMr ShutterBug氏の機体構成には非常に興味を持っており、Beta75Xを85mmフレームに載せ替えた機体(Shutterbug85構成機)が大好きで普段の練習機としてよく飛ばしています。
そして上記動画の機体にも興味があり、以前これに近い構成で機体を組みその飛びを検証したことがあります。
今回ご紹介しているBeta85 Pro2とほぼ同じ構成機です。

その時の検証では、機体に負荷がかかる動きをさせた時に発生するWashOutが非常に気になり、6A ESCでの85mmフレーム化はあまり適さないと個人的にはそう感じていました。
というのも初期型のBeta75X(6A ESC)での85mmフレーム化も試したことがあるのですが、やはりこの機体でも近い結果となり85mmサイズのフレームには12A ESCが最適だと個人的にそう感じていたからです。
そして今回のBeta85 Pro2くんです。
梅雨のこの時期、なかなか飛ばせる時間が少なく雨が止んだ合間を見て少しテストフライトをしてみました。
機体に負荷がかかる動きをさせ以前気になっていたWashOutがどうなるのかテスト!
驚くことにWashOut等の挙動はほぼ見られず、非常に安定して飛ばしやすくなっていました!!!
https://youtu.be/cUwT9iX5g2g
これメチャ私の好きな飛びっす!
85mmフレームサイズのWhoopは、75X改(85mmフレーム化)やURUAV UR85、Beta85Xなどを普段練習機として飛ばしていますが、どの機体も安定感があり飛ばしやすいです。(85Xは3セルに限ります)
これらの機体と比べても、Beta85 Pro2は同様に安定した飛びを見せてくれました。

機体重量が軽く、そして今回エアーモードを入れモーターアイドルスロットル値を6.5まで上げてテストしてみたのですが、スロットルを抜いた時の浮遊感も良く上手い方ならここで2発ほどトリックを入れたり・・・なんてできるんだろうなぁと!
いい意味で期待を裏切ってくれたこのBeta85 Pro2くん、すごくいい機体(個人的には大好きです)だと思います。
となると以前やった私の検証はなんだったんだと!?
この辺り自分の中で解決できていないのでどなたかご教授していただければありがたいのですが。
と、いろいろ前置きが長くなってしまいましたが、今回はこのBeta85 Pro2を飛ばせるまでのバインドから最低限のBetaflightの設定をしていきたいと思います。
目次
【Beta85 Pro2】バインドから最低限のBetaflight設定!

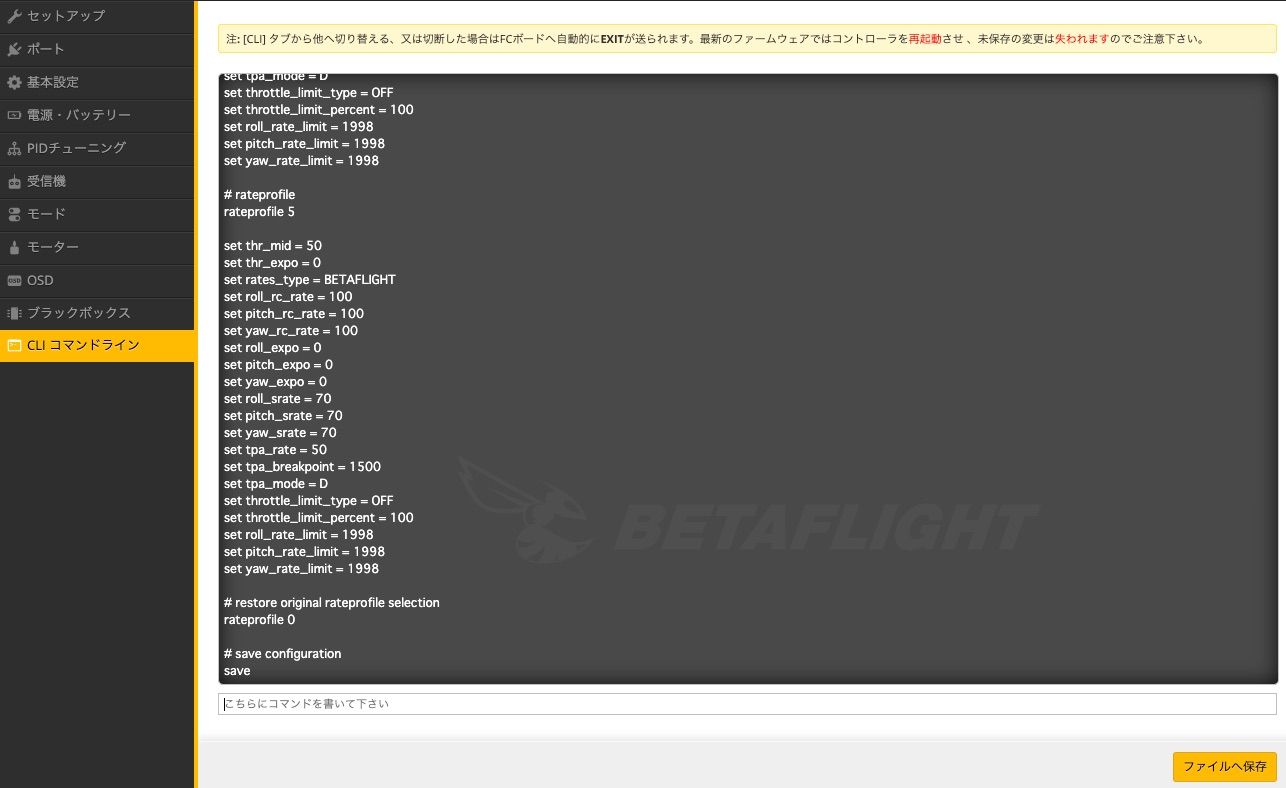
初期状態の設定を保存!
Betaflightに機体を接続し、まずは初期状態の機体設定を保存しておきましょう。
【CLIコマンドライン】から[dump all]と打ち込み初期状態の設定を保存。
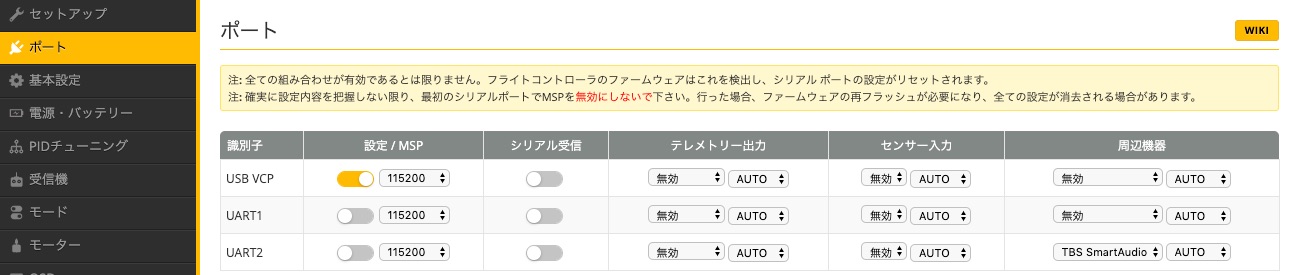
ポート設定!
こちらはデフォルトのままで特に問題なさそうですね。
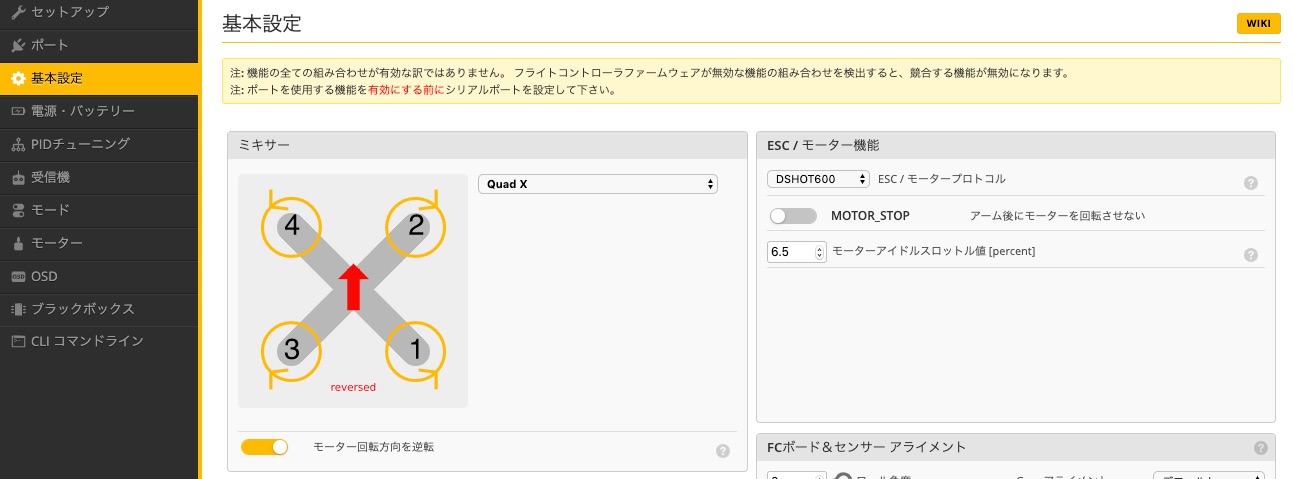
基本設定!
デフォルトでモーター逆回転構成になっています。
モーターアイドルスロットル値を4.0から6.5に上げました。
こちらはお好みで!
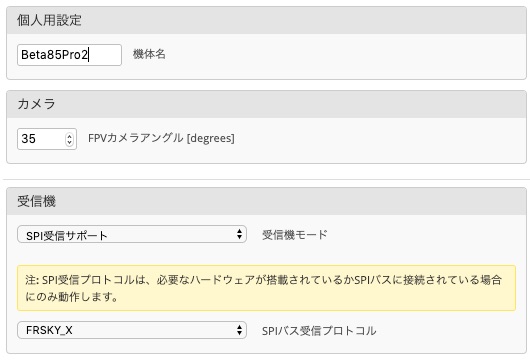
機体名を入力。
受信機設定は、FRSKY_X(Frsky D16 MODE)となっています。
特に問題ないですね。
[エアモードを常時使用]をオンに変更しました。
こちらもお好みで!

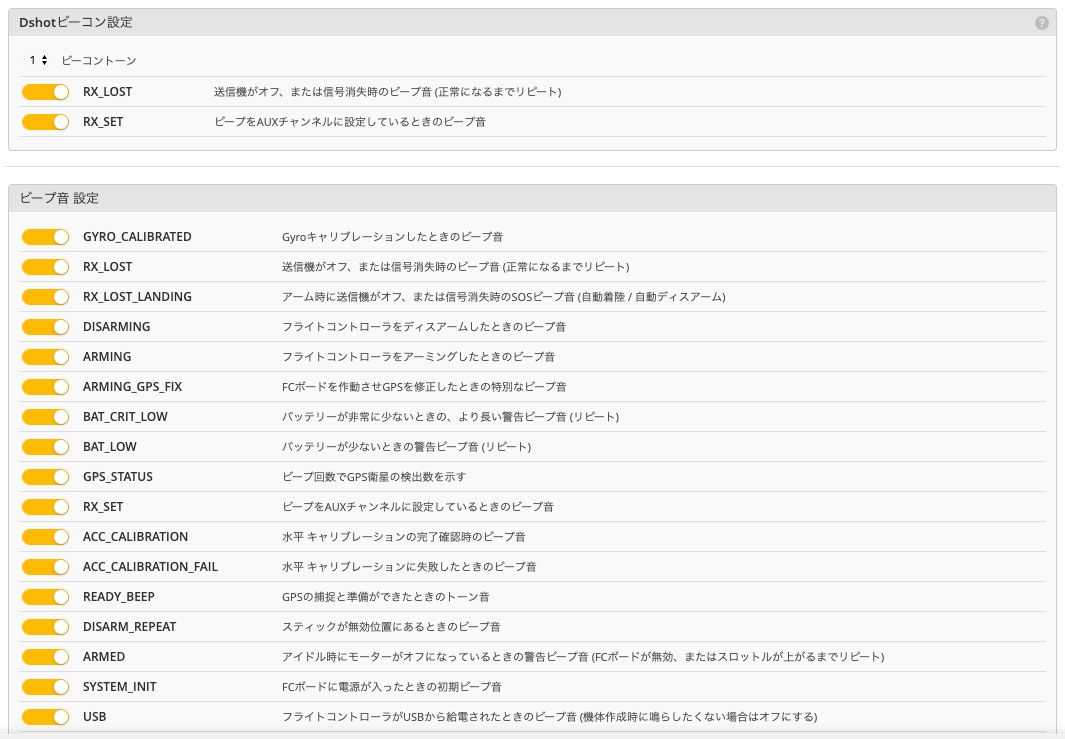
Dshotビーコン設定、ビーコントーンをオンに設定!
その他はデフォルトで問題なさそうですね。
電源・バッテリー設定!
こちらが初期状態の設定!
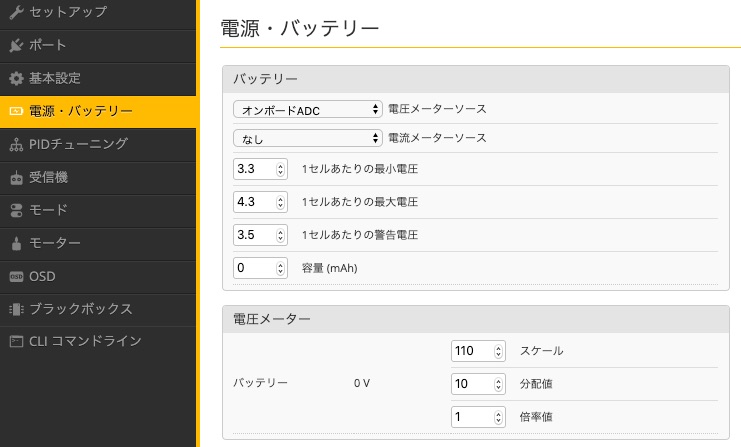
デフォルトで電流メーターソースが設定されていないので[バーチャル]を設定し、[電流メーター]の値を入力。(同FCを使っているBeta75 Pro2の値を引用)
電圧値も少し微調整しました。
この辺り飛ばしながら微調整していけばいいかと思います。(特にデフォルト値でも問題なさそうですが!)

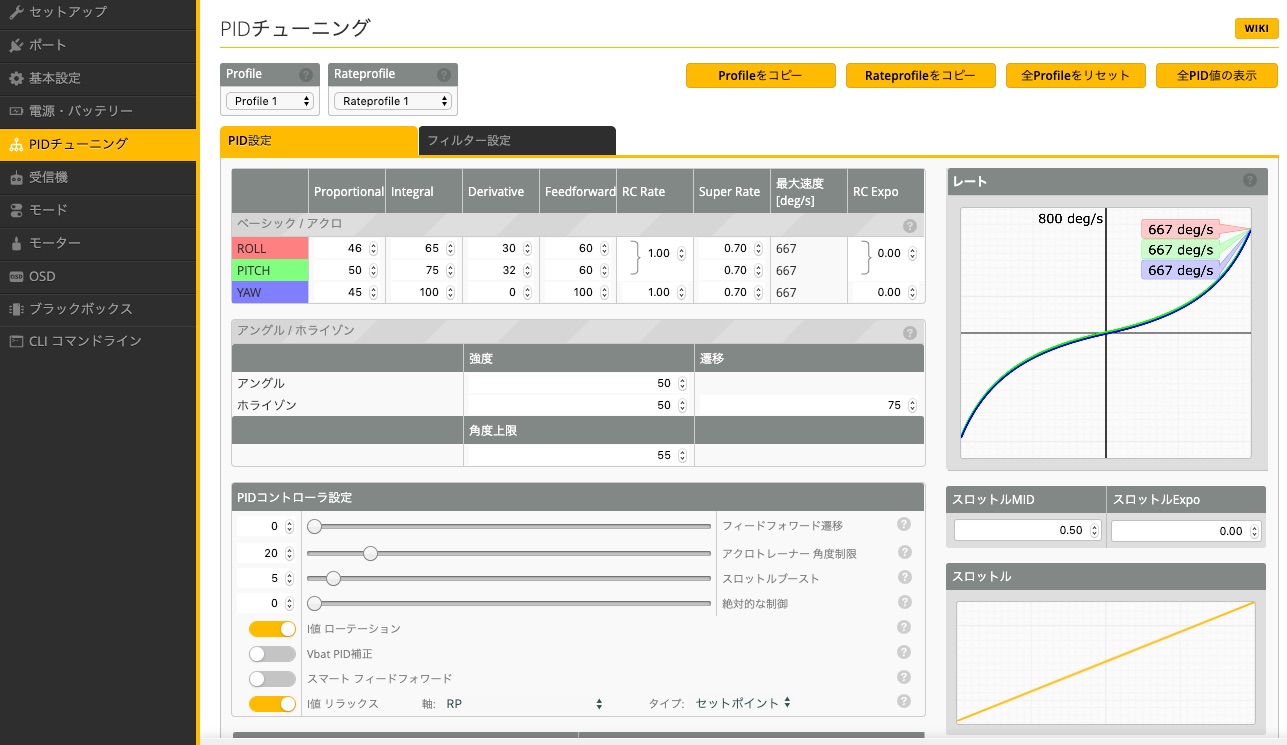
PIDチューニング!
こちらがデフォルトで設定されているPID値です。
普段飛ばされている値に調整して下さい。
送信機とバインド!
ここまで設定ができたら送信機と機体をバインドさせます。(最初にやっちゃっても問題ないのですが)
USB端子が接続された状態(バッテリー接続の必要はありません)で機体のBINDボタンを押せばFCのLEDが点滅から点灯状態となりバインドモードに入ります。

この状態で送信機のBINDボタンを押しバインドして下さい。
バインドが完了したら一旦Betaflightとの接続を解除、電源を落とし、再度Betaflightと接続します。
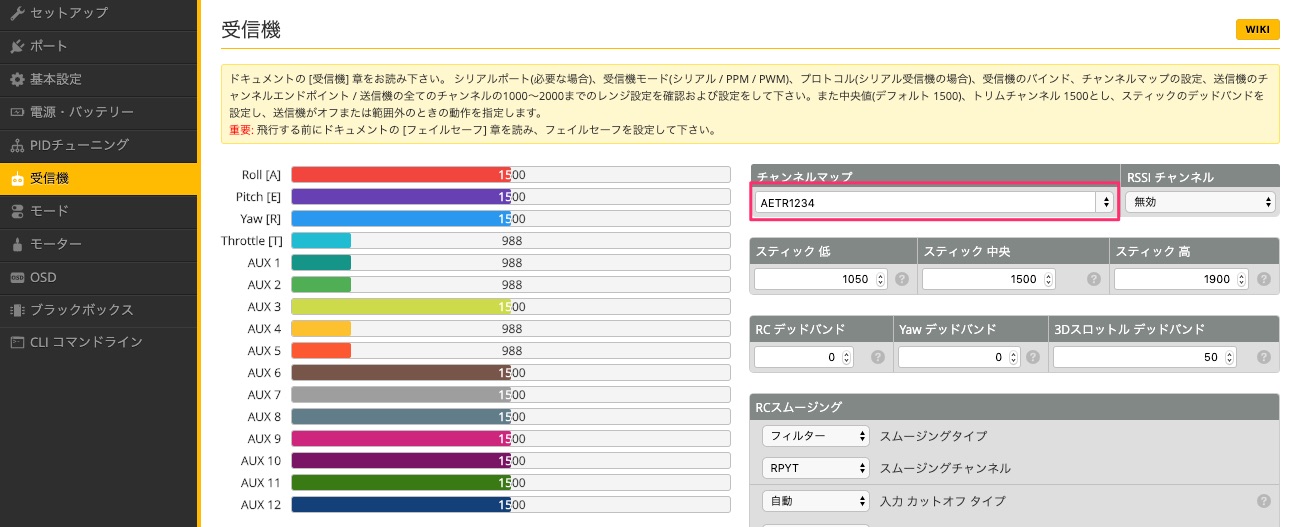
受信機設定!
次に【受信機】タブの[チャンネルマップ]をAETR1234に設定し、送信機を操作し動作確認が出来ればバインド作業は完了です。
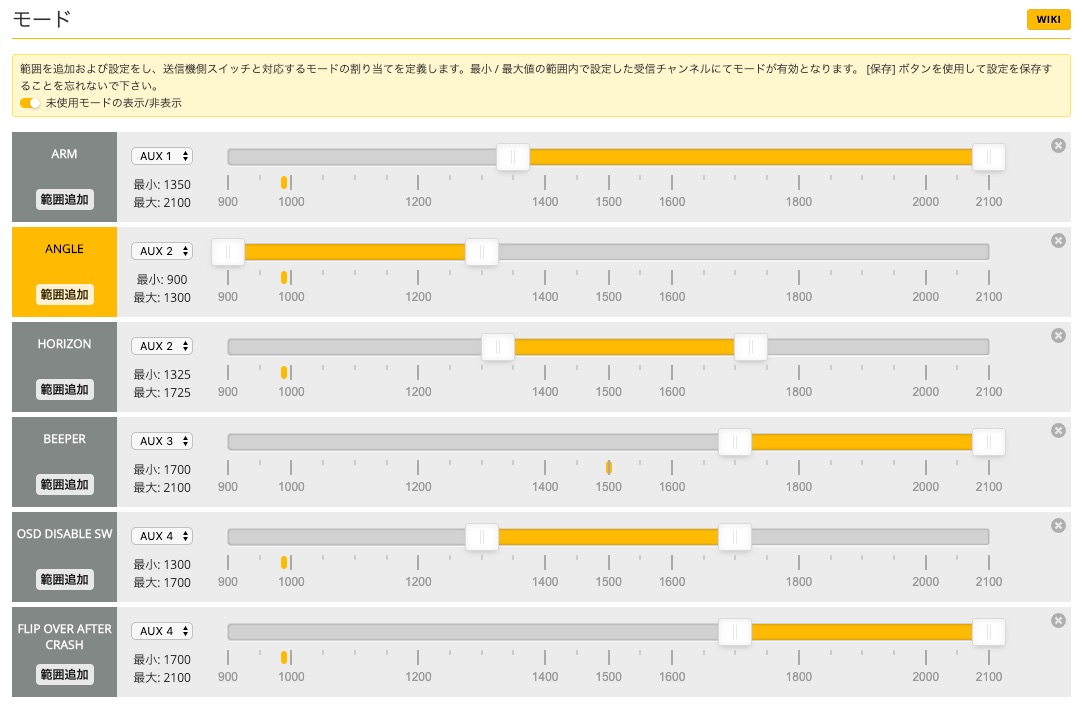
モード設定!
初期状態では、ARM、ANGLE、HORIZON、FLIP OVER AFTER CRASHが設定されています。

あと最低限、BEEPER(ブザー)の設定は入れておきましょう。
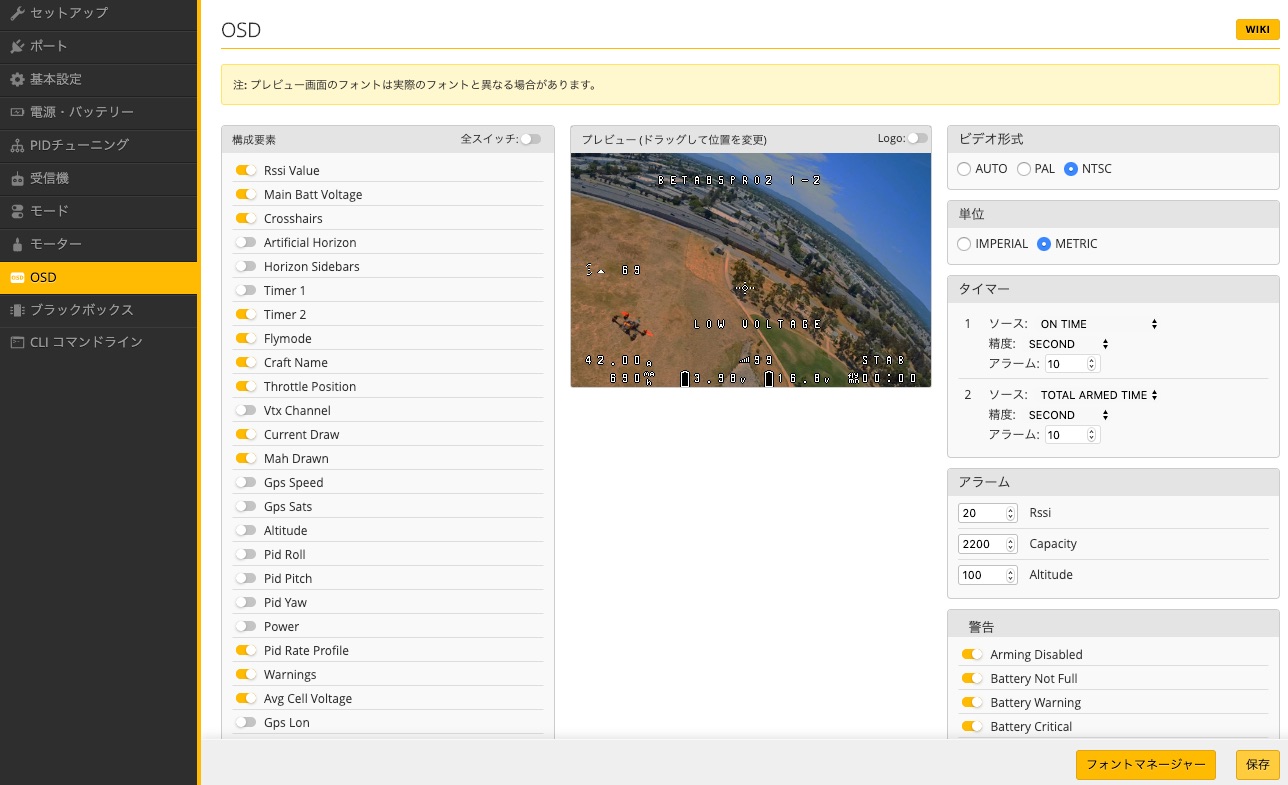
OSD設定!
こちらはお好みで設定して下さい!
私はいつもこんな感じの設定にしています。
設定変更の保存!
以上設定が完了したら設定内容を保存しておきましょう。
[CLIコマンドライン]からdiff all(差分バックアップ)で設定内容を保存して最低限のBetaflightでの設定は完了です!
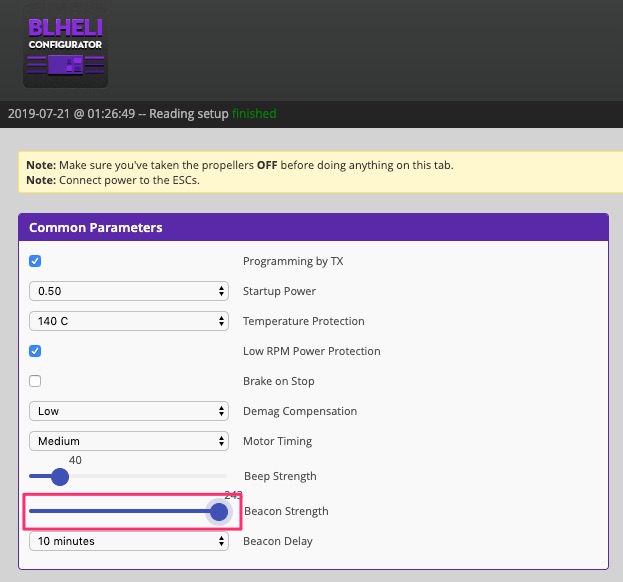
BLHELIでブザー音量設定!
今回ご紹介しているBeta85 Pro2は、Frsky受信機内蔵のFCが使われておりブザーポートがありません。(受信機が内蔵しないNo RxタイプのFCを選択の場合はブザーポートがあります。)
そのためモーターから音を鳴らすビーコンブザーの音量を少し上げておいた方がいいかもしれません。
BLHELIと機体を接続します。(バッテリーの接続が必要!)
Beacon Strengthを上げて[Write Setup]で保存して完了です。
以上でBeta85 Pro2を飛ばすための最低限の設定は完了です!
少し気になった点!
少し飛ばしてみて気になったところがあります。
まず一つ目は、飛ばし方にもよるかと思いますが(今回はテストの為、スロットルに強弱を大きく入れてました)、飛行後のバッテリーの発熱が少し気になりました。
飛ばし方に大きく左右されるかと思いますが、PID等の調整で改善できるのか今後いろいろ調整をしてみたいと思います。
もう一つは、ペラが抜けやすいです。
これはペラの個体差もあるかもしれませんが、BETAFPV製の1103(11000KV)モーターにはペラ固定用のネジ穴がないため(8000KVモーターではあるのかな?)飛行中にEMAX Avan 2ペラがスッポ抜ける事がよく起こります。
この1103(11000KV)モーターとEMAX Avan 2ペラの組み合わせでは、75X(85mmフレーム機)の時も頻繁に起こっていました。
これに関しては解決策は簡単なのでこちらを参考にしてみて下さい!

まとめ!
非常に安定感があり飛ばしやくBETAFPVさんが推されているのも納得です!
またお気に入りの機体が一つ増えました!
個人的にWhoop野外機は、もう85mmフレームサイズしか考えられなくなってきました!
何でこんなに安定するのだろうか?不思議なものです!
そして同構成機で以前検証した飛びは何だったのか?
いろいろと原因を探っております・・・。
 【Tiny Whoop】UR65のサブ機としてBeta65 Proを購入。室内安定飛行のUR65、野外でパワフル飛行のBeta65 Proという位置付けに!
【Tiny Whoop】UR65のサブ機としてBeta65 Proを購入。室内安定飛行のUR65、野外でパワフル飛行のBeta65 Proという位置付けに!  【Toothpick化】1S Toothpick機に挑戦!BETAFPV Beta65 ProをベースにToothpick化してみる!
【Toothpick化】1S Toothpick機に挑戦!BETAFPV Beta65 ProをベースにToothpick化してみる!  【Beta75 Pro2】標準の08028モーターを1103モーターに変更。飛行時間が1分ほど延び飛行も安定、プロップウォッシュも出にくくなるようですね!
【Beta75 Pro2】標準の08028モーターを1103モーターに変更。飛行時間が1分ほど延び飛行も安定、プロップウォッシュも出にくくなるようですね!  【Beta85 Pro2】ロスト防止にブザーを取り付ける!リソースのリマッピングでブザーポートがなくてもLED_STRIPを利用してブザーが使えるようになるんですね!
【Beta85 Pro2】ロスト防止にブザーを取り付ける!リソースのリマッピングでブザーポートがなくてもLED_STRIPを利用してブザーが使えるようになるんですね!  【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!
【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!  【BETAFPV Beta85 Pro2 先行レビュー】1103モーターにアップしたBeta85 Pro2!以前同じ構成で機体を組んで検証した事があるのですが・・・その飛びはいかに!【Shutterbug85】
【BETAFPV Beta85 Pro2 先行レビュー】1103モーターにアップしたBeta85 Pro2!以前同じ構成で機体を組んで検証した事があるのですが・・・その飛びはいかに!【Shutterbug85】  【Tiny Whoop】室内&野外でもガンガン飛ばせられる軽量2S機『Beta65 Pro2』。Beta65Xより飛行時間が大幅に延び非常に飛ばしやすい!
【Tiny Whoop】室内&野外でもガンガン飛ばせられる軽量2S機『Beta65 Pro2』。Beta65Xより飛行時間が大幅に延び非常に飛ばしやすい!  【BETAFPV Pro Series】野外ロスト防止にBeta75 Pro2にブザーを取り付ける!
【BETAFPV Pro Series】野外ロスト防止にBeta75 Pro2にブザーを取り付ける! 

コメントを残す