最近仲間に加わったCine Whoop『Beta85X HD』や『FullSpeed TinyLeader』を飛ばすようになり、その楽しさにハマっております。(先日Beta85X HDくんは激突による大破で現在休眠中ですが!)


使われているCaddx Turtle V2カメラは、レンズの口径が大きく通常Whoopで使われているAIOカメラと比べてゴーグルの映像も鮮明に見ることができます。
Beta85X HDを飛ばした後にMobula7などを飛ばすと、んん?観にくい!そんな感じに!
通常Whoopで使われいるAIOカメラの解像度は600〜700TVLくらいなので、比較してしまうとコントラストや解像度が低く当然と言えば当然なんですが!
ある程度Mobula7を飛ばしたらやろうと考え用意していたCaddx EOS2カメラと200mW出力VTX『Whoop_VTX』を使いカスタマイズを今回やってみました。
Caddx EOS2カメラ&Whoop_VTXでMobula7をカスタマイズ!
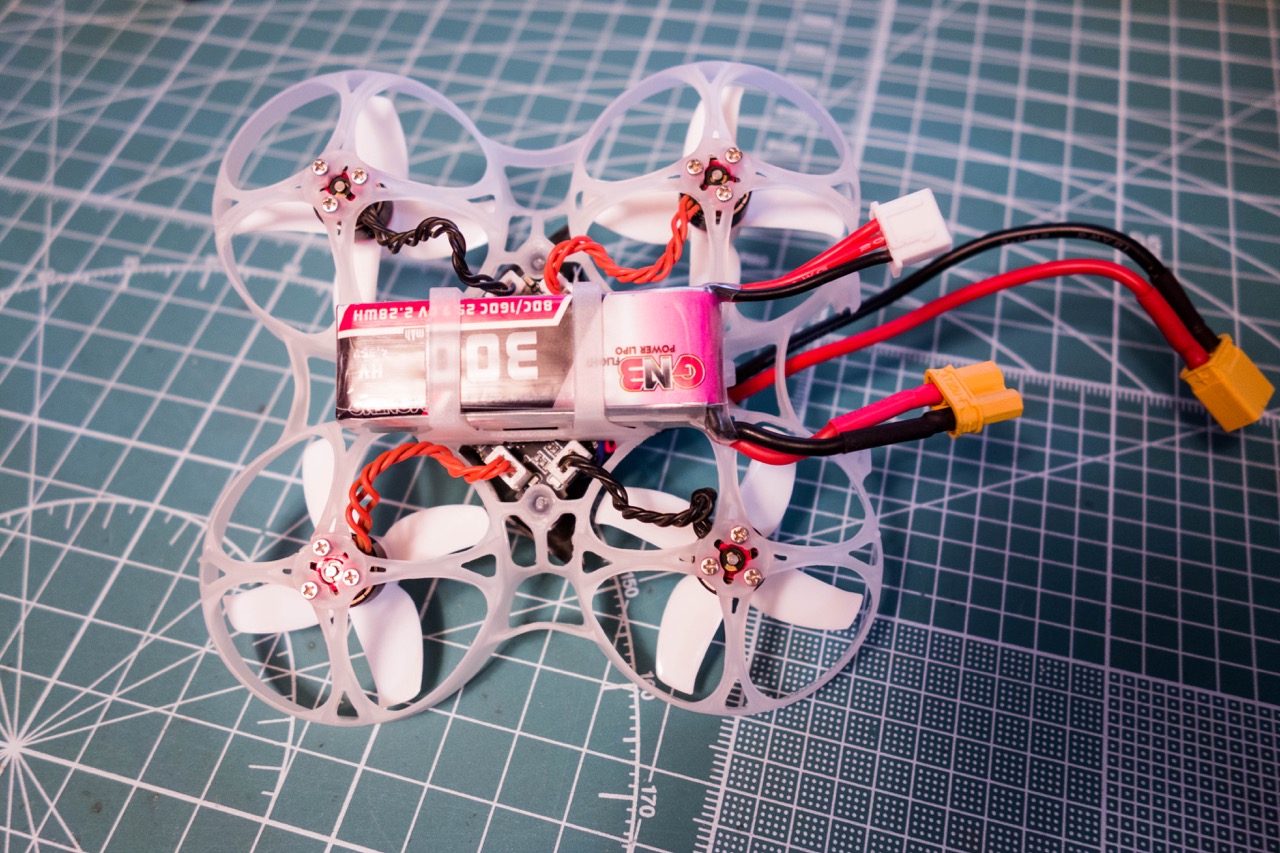
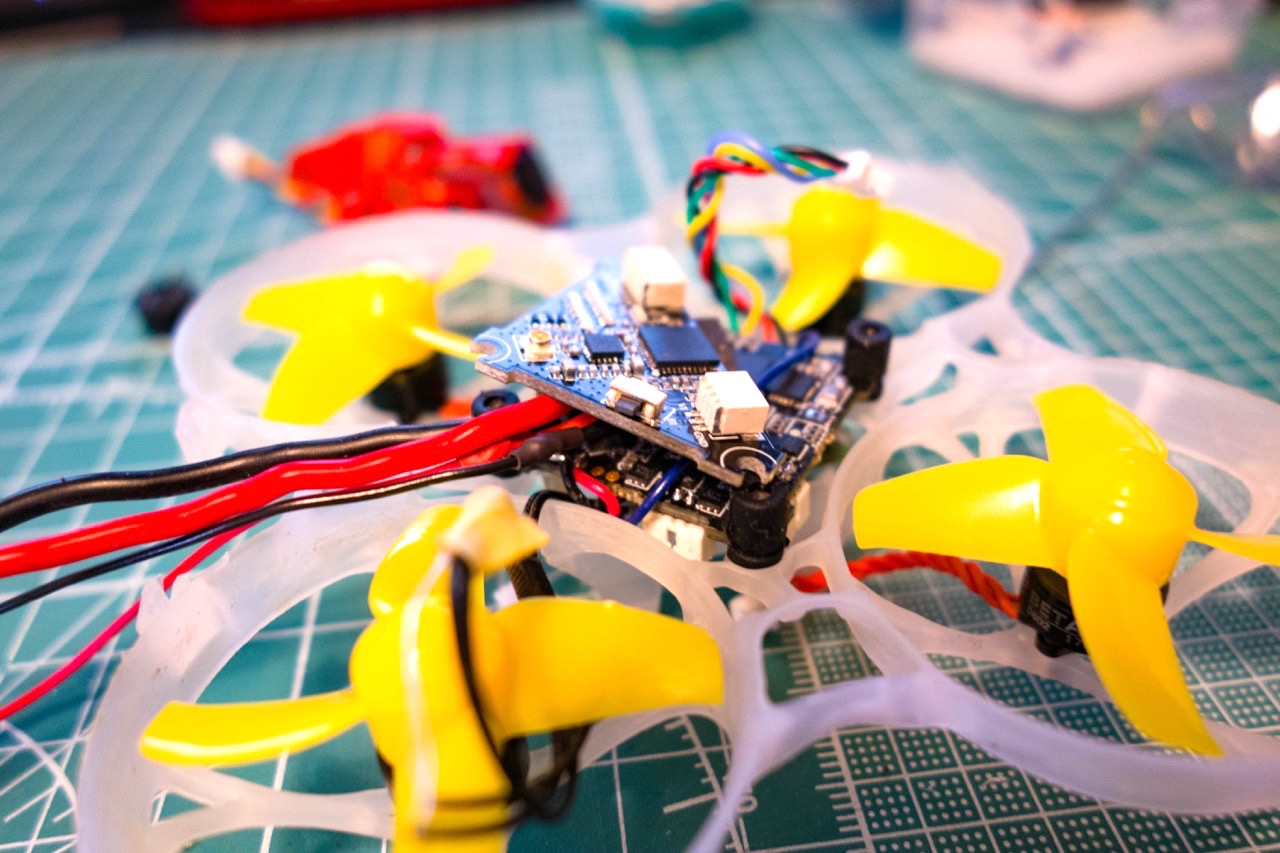
まずは現在のMobula7の構成はこんな感じとなっています。
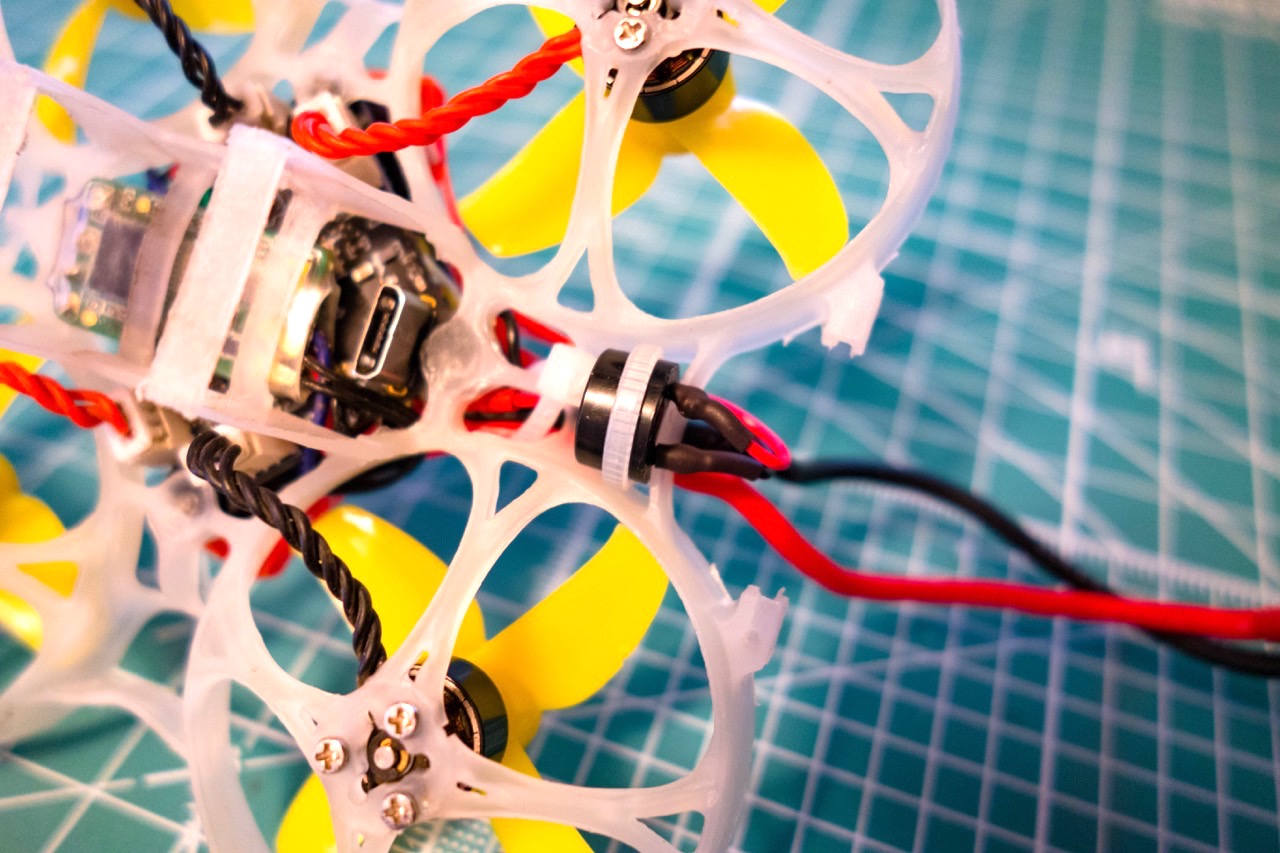
2セルバッテリーで飛ばすため、標準の1セルバッテリー(JST-PH2.0×2)のものからピッグテールをXT30プラグに変更しています。
また、購入時に装着されていたV2フレームは非常に弱く野外飛行2回目にして再起不能なまでに破損したため、現在最新のV3フレームに変更しています。

このV3フレームはバッテリーホルダー部分が改良されており2セルバッテリーも搭載できるようになっています。
また、私は特に必要としていないので付けていませんがフレーム後部にLED_STRIPボードを付けるためのスリットも設けられています。

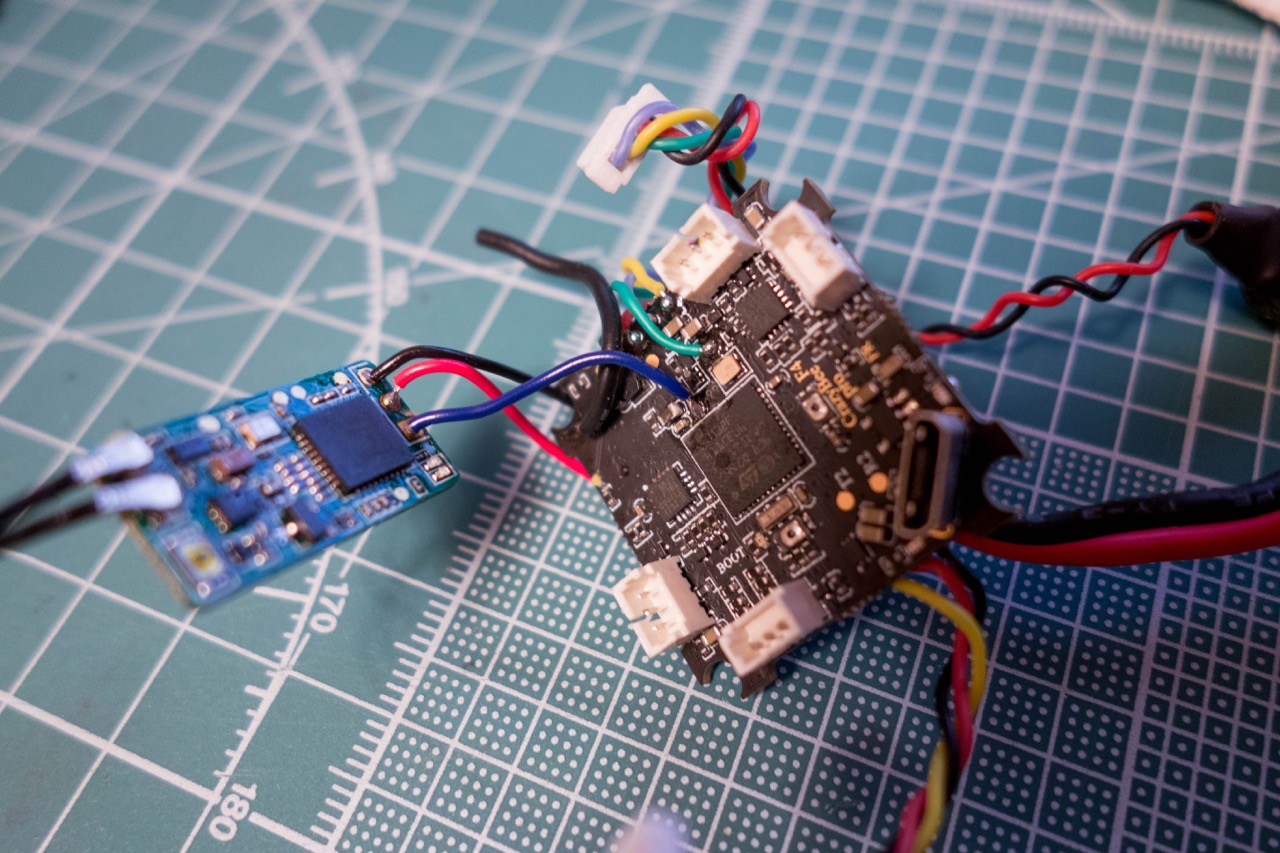
そして、野外飛行をする際に電波到達距離の問題から外部受信機(Frsky xm+)を増設しています。
野外で飛ばす2セル機は基本外部受信機を付けていますが、このMobula7に関していうと私の使っていた受信機内蔵FCの電波が弱く50mほど離れると接続が切れて墜落、なんてのが数回ありました。
個体差なのか、たまたま電波受信が弱いものに当たっただけなのかもしれませんが、やはり2セル機を野外で飛ばすには外部受信機を付けておく方が安心です。

外部受信機を増設すると、標準で使われている25mW出力のAIOカメラでは距離が離れると今度は映像が先に途切れるようになります。
そして今回、このVTXをMobula7のアップグレードパーツとして販売されている200mW出力VTX『Whoop_VTX』に交換してみることに。

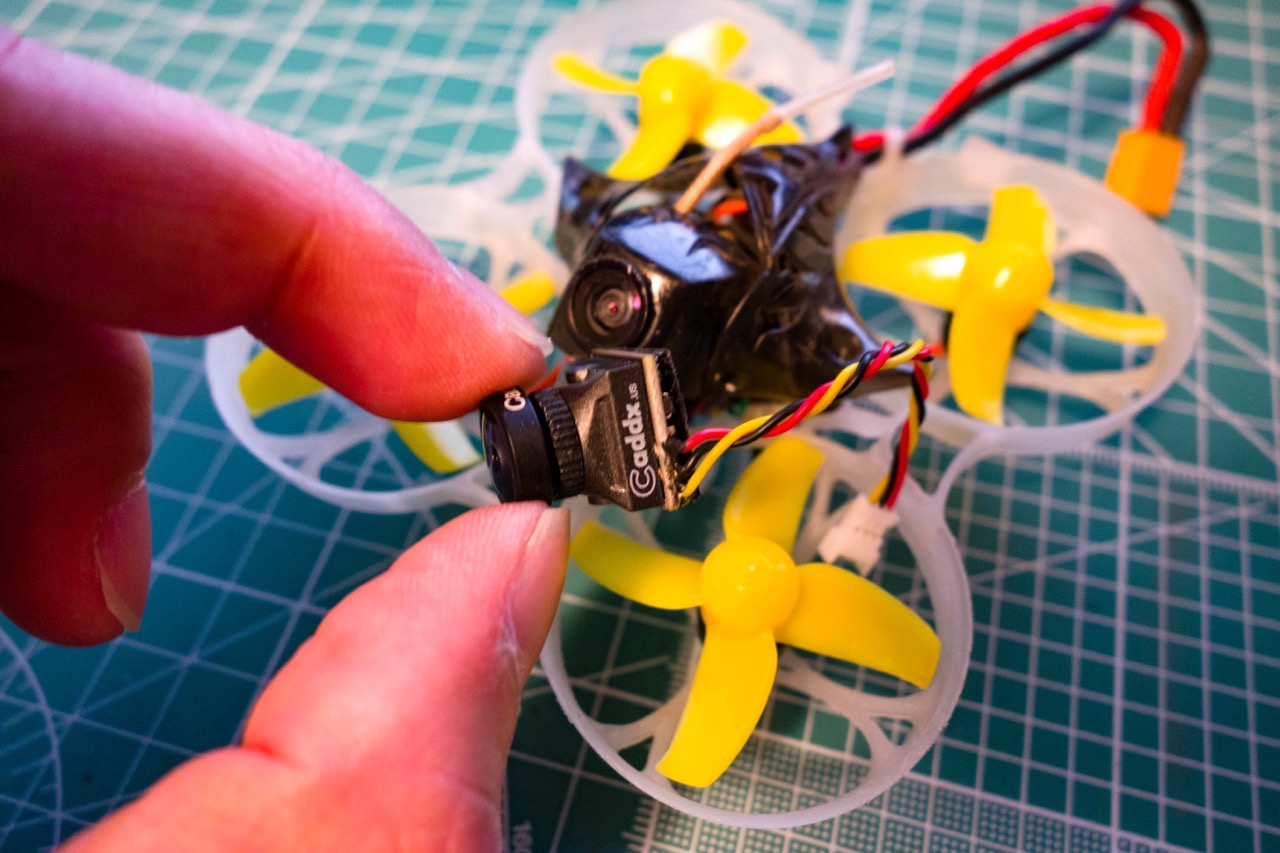
そしてカメラも高画質1200TVLの『Caddx EOS2』に交換してみました。
それではMobula7くんをカスタマイズやっていきましょう。
200mW出力可能な『Whoop_VTX』
200mW出力VTXにMobula7アップグレードパーツ『Whoop_VTX』を今回使用しました。
Eachine TRASHCANには標準で付けられているVTXですね。
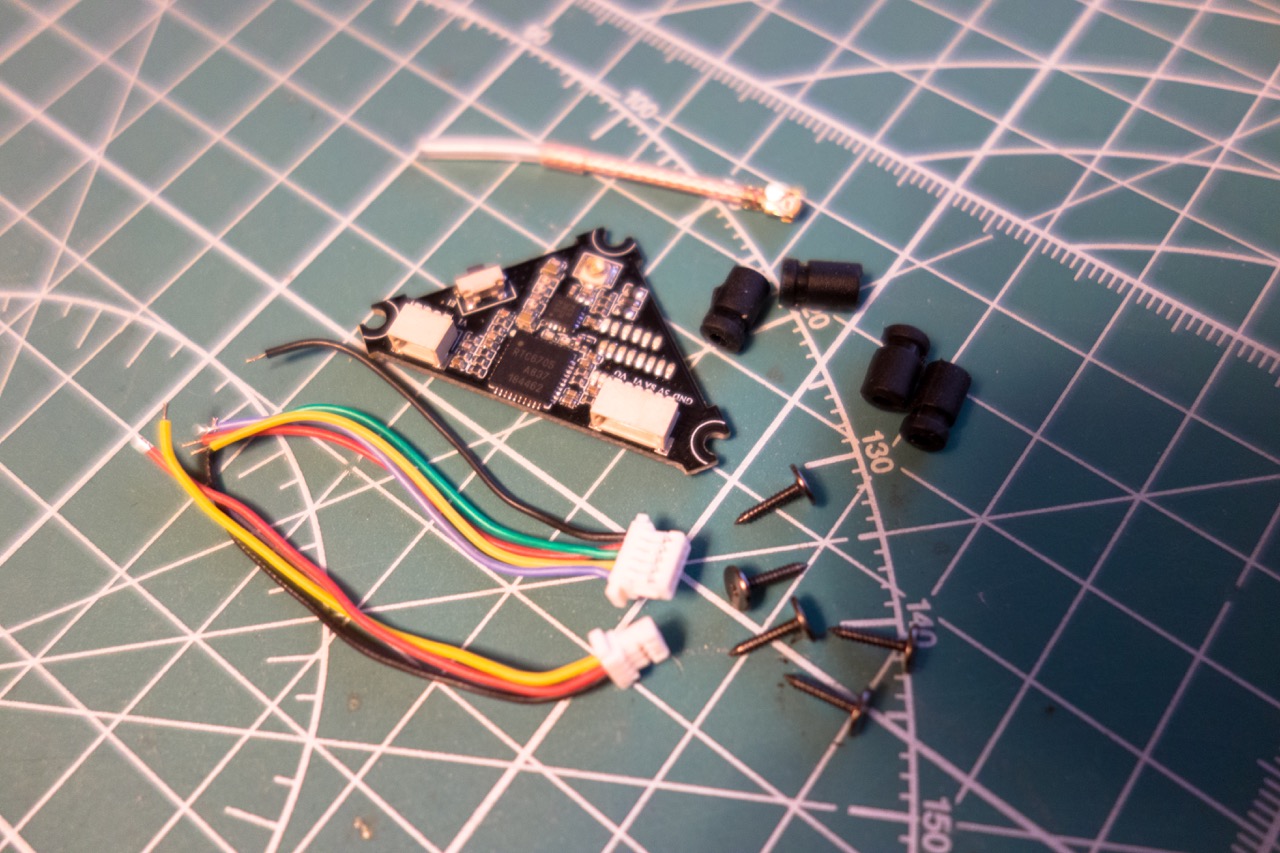

三角形の独特な形をしたVTXです。
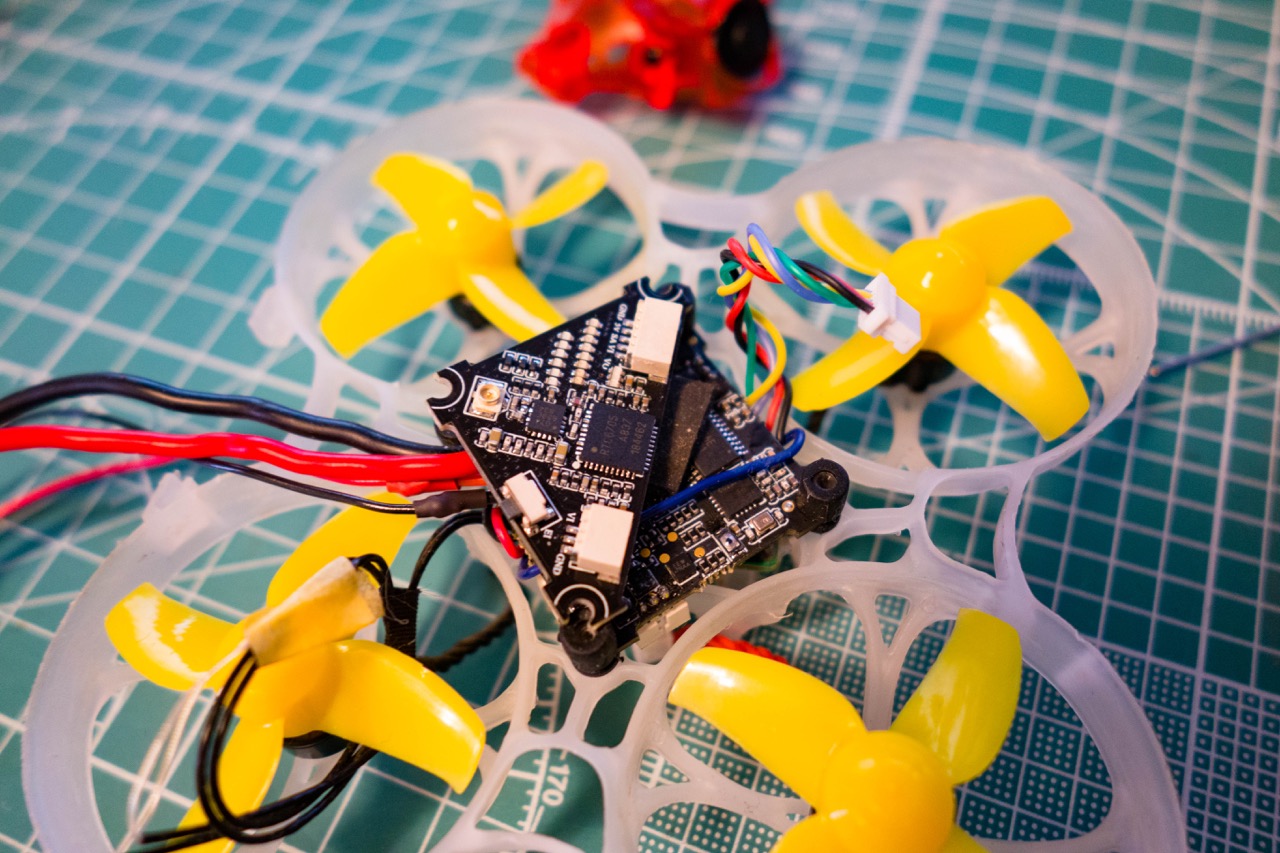
Mobula7のフレームは4ヶ所のFC固定ポールが高くなっており、また少し長めのゴムダンパーが使われているのでFCの上に接触することなく設置することができます。
FCとカメラとの接続はコネクタ式となっています。
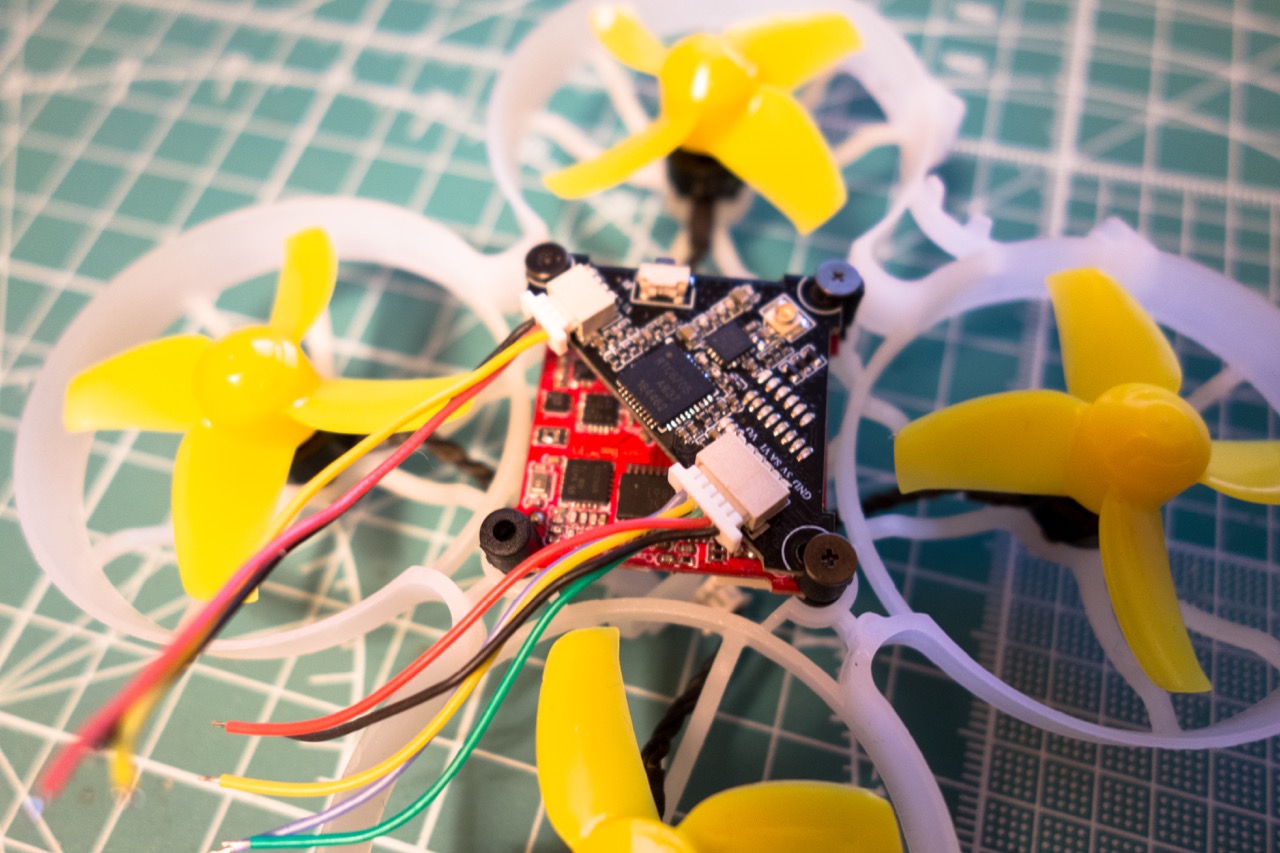
TRASHCANの時もそうでしたが、コネクタ式のためカスタマイズやメンテナンス等で機体をバラす時にFCからカメラやVTXを分離することができるので作業は非常にしやすくなります。
またカメラ交換時にも役立ちますね!
それでは作業をやっていきましょう。
まずは標準で付いているAIOカメラを取り外します。
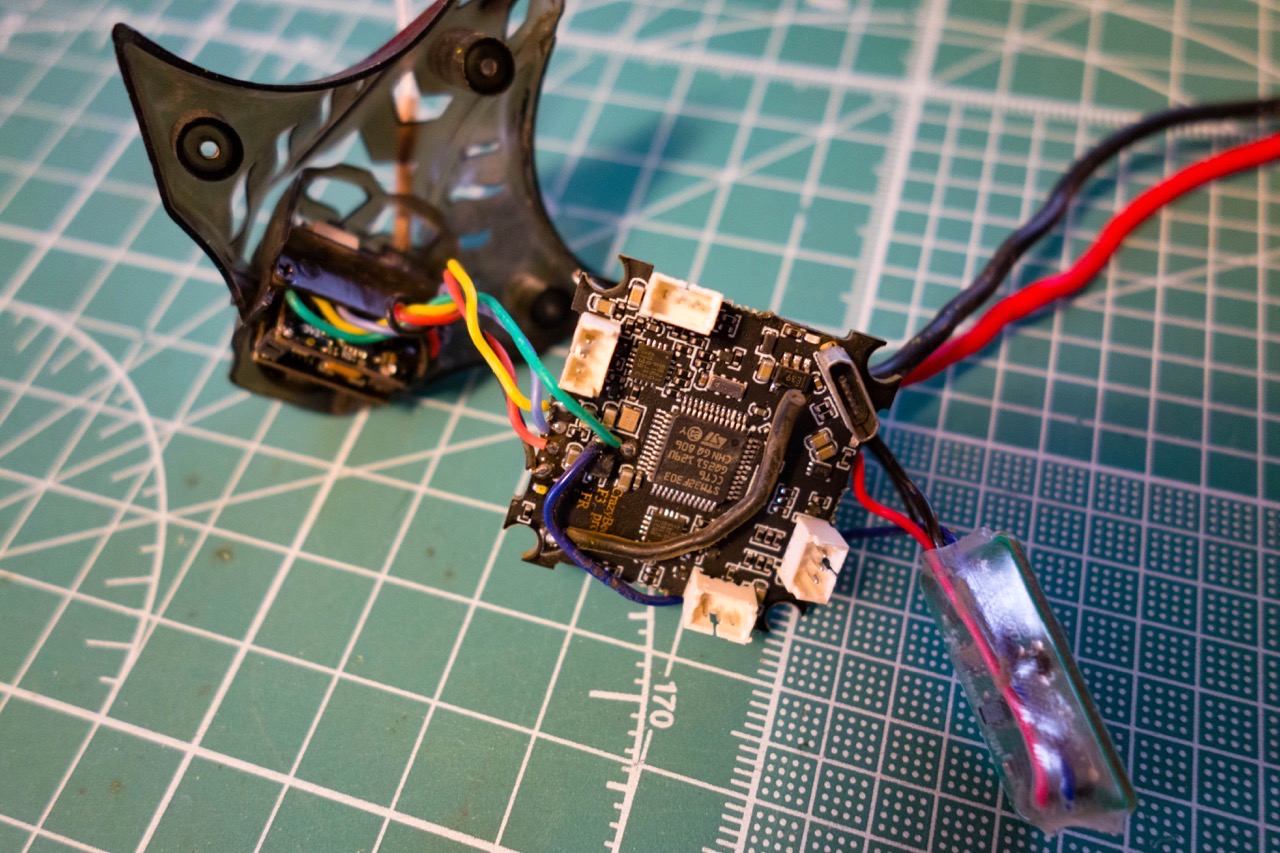

そしてFCにWhoop_VTXに付属の5ピンコネクタを取り付けます。
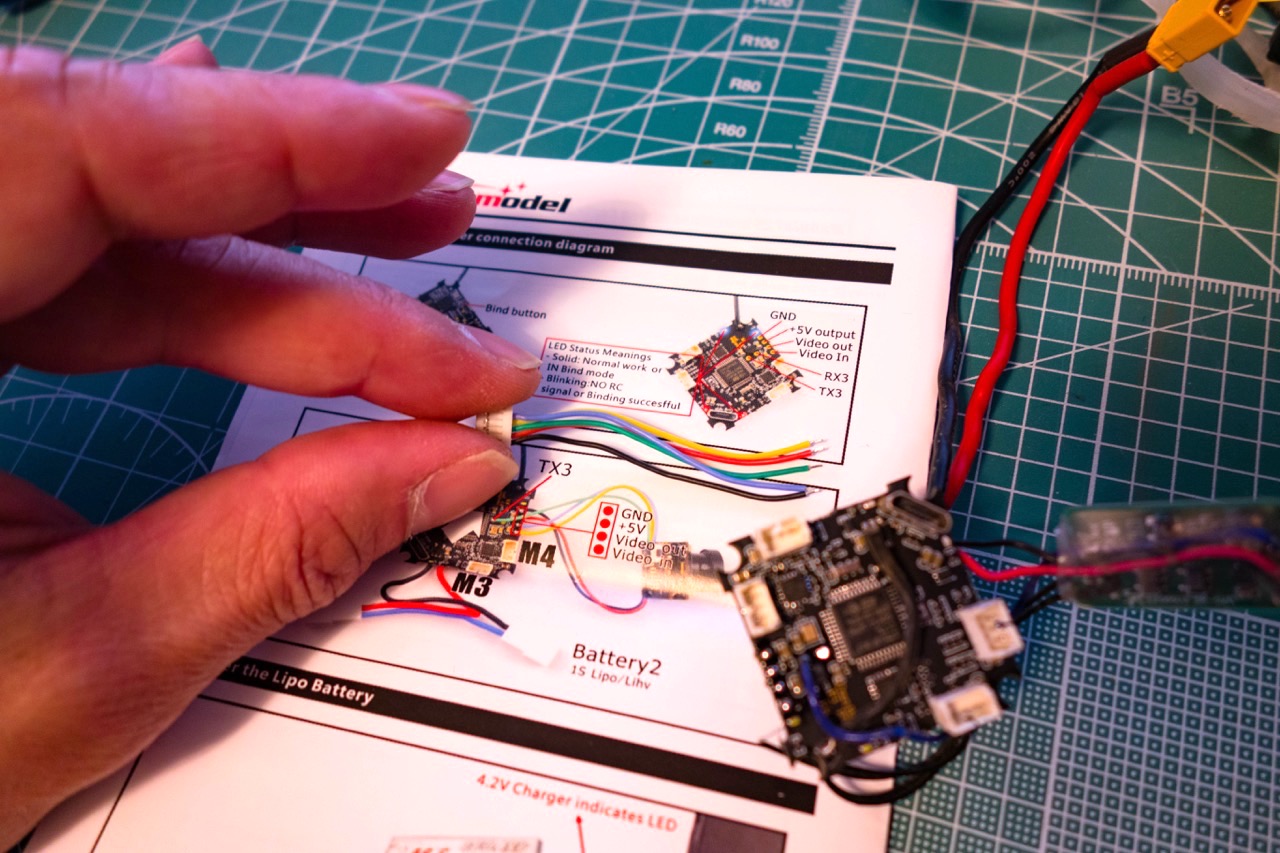
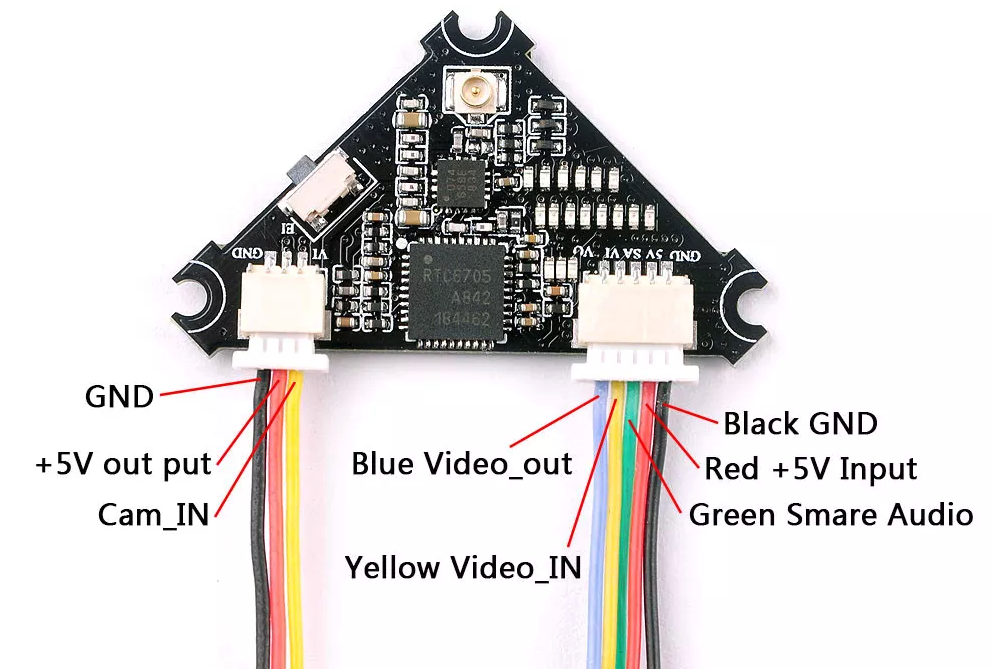
Whoop_VTXのピン配列はこちらを参考にして下さい。
Caddx EOS2カメラの固定はTRASHCANキャノピーを使用!
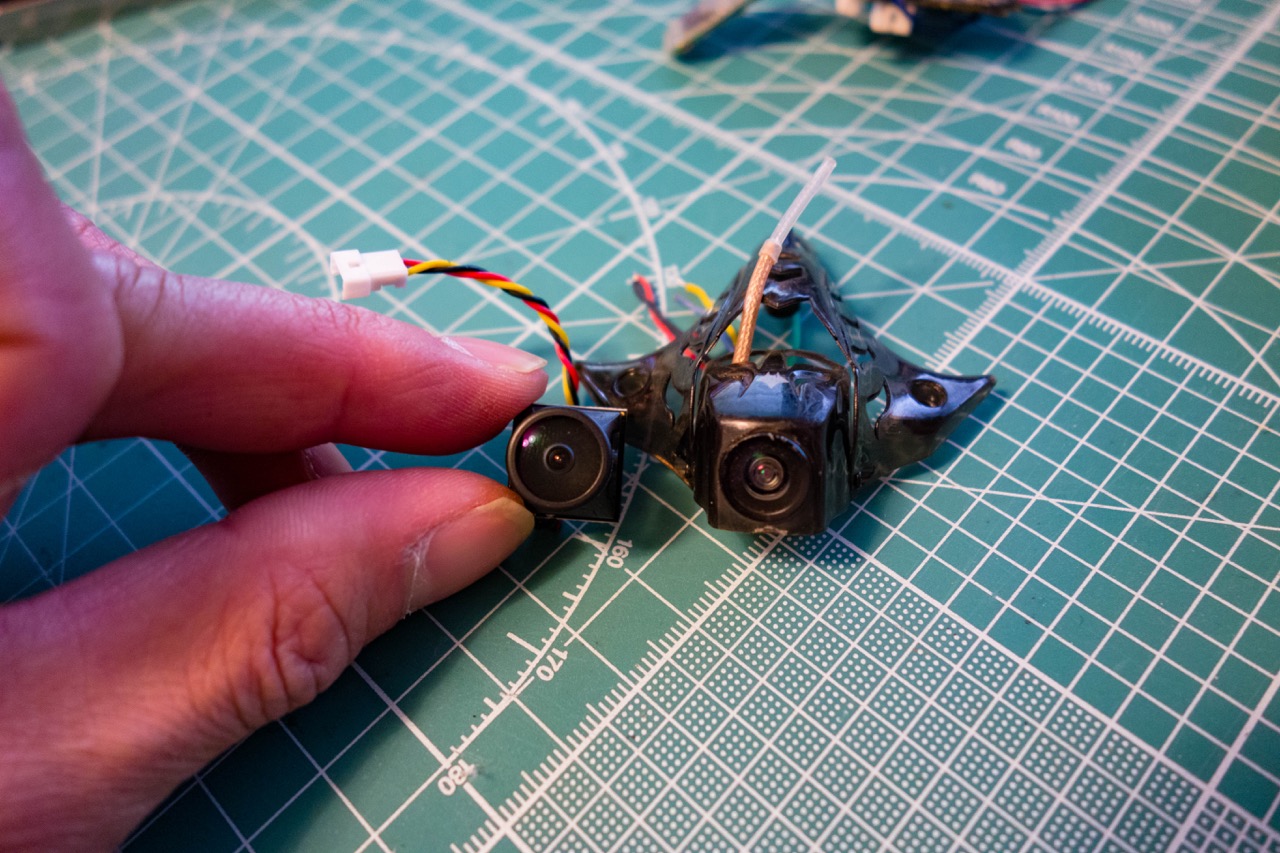
次にCaddx EOS2カメラの設置ですが、レンズの口径が標準のAIOカメラよりも大きくなっているのでもちろんMobula7標準のキャノピーでは固定することができません。
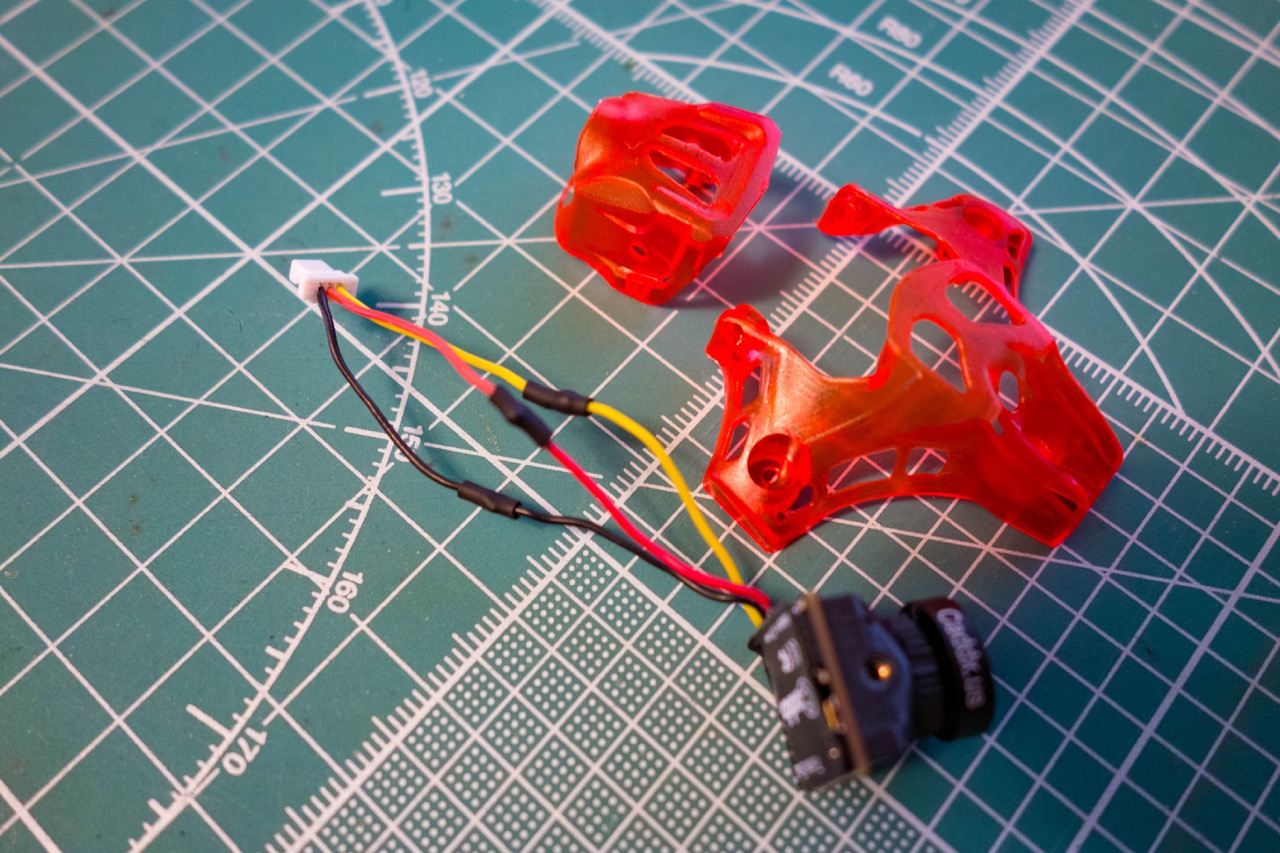
EOS2カメラを使うためにアップグレードされたMobula7 V2キャノピーが販売されていますが、私は形状的に好みなTRASHCANキャノピーを使いました。

またTRASHCANキャノピーではWhoop_VTX付属の太いネジも使えるのでキャノピーの固定もしっかり出来るようです。
この辺はお好みで!

Eachine TRASHCAN 75mm FPV Racing Drone Spare Part RC Head Cover Camera Canopy

Happymodel Mobula7 Part V2 Angle Adjustable Camera Canopy for RC Drone Caddx EOS2 Camera

Caddx EOS2カメラには、アスペクト比が16:9と4:3タイプのものがあります。
今回私は4:3タイプのものを使用しています。
EOS2カメラには標準でこのようなオス型のプラグが付けられています。
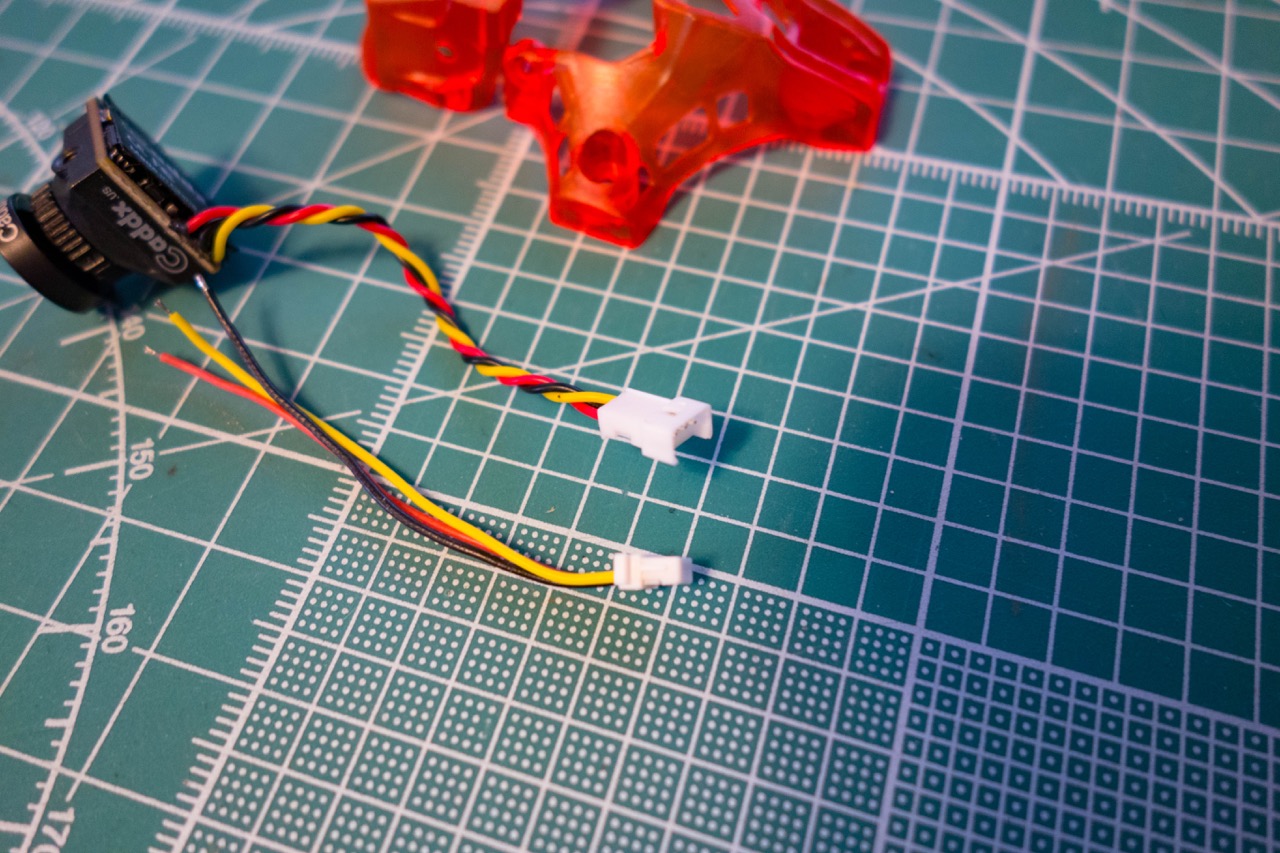
今回使用しているWhoop_VTXには3ピンの1mm ピッチのプラグで接続する必要があるため、プラグを切り取りVTX付属のプラグを半田付けします。

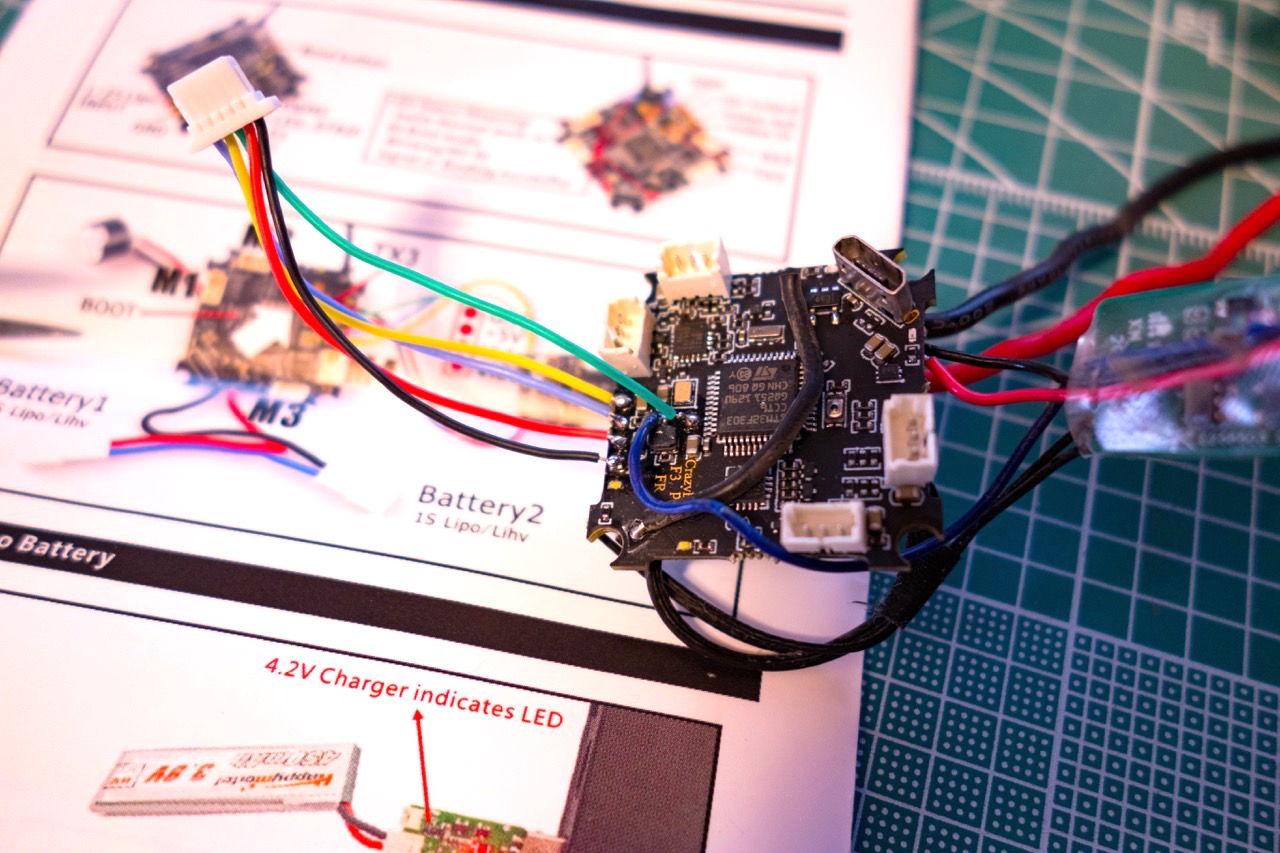
ここまで出来たら一応、動作確認をしておきましょう。
問題ないようですね!

そしてTRASHCANキャノピーにEOS2カメラを固定。
EOS2カメラ固定には1.0mmの六角ネジ(HEXネジ)が使われているので、こちらの工具も必要となってきます。

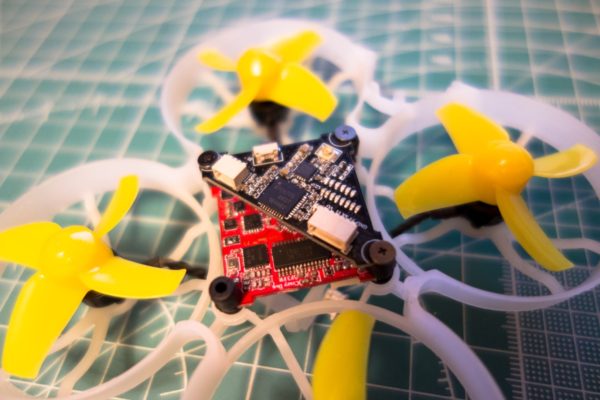
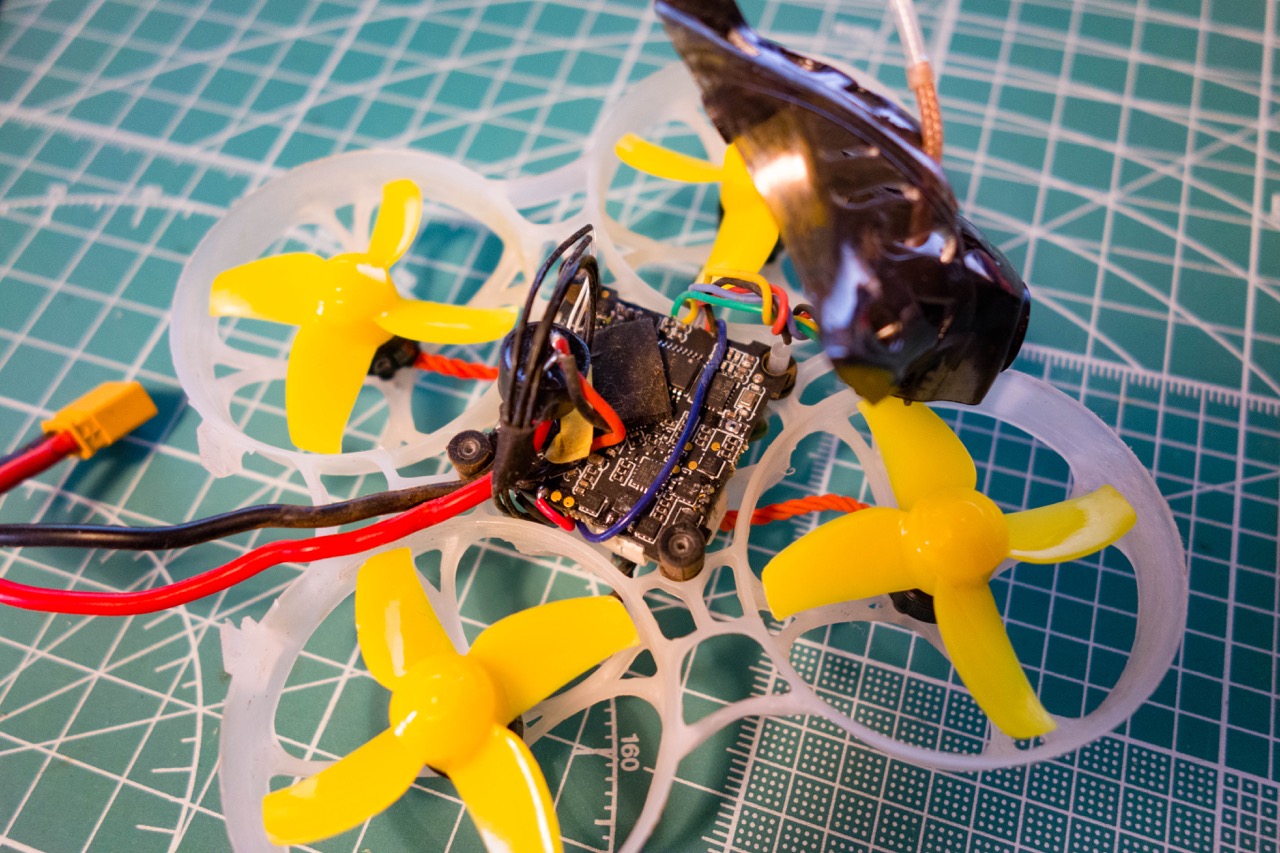
キャノピーにEOS2カメラの固定ができたらサクッと組み立て!
VTXのプラグにFCとカメラからの端子を差し込むだけなので簡単です。
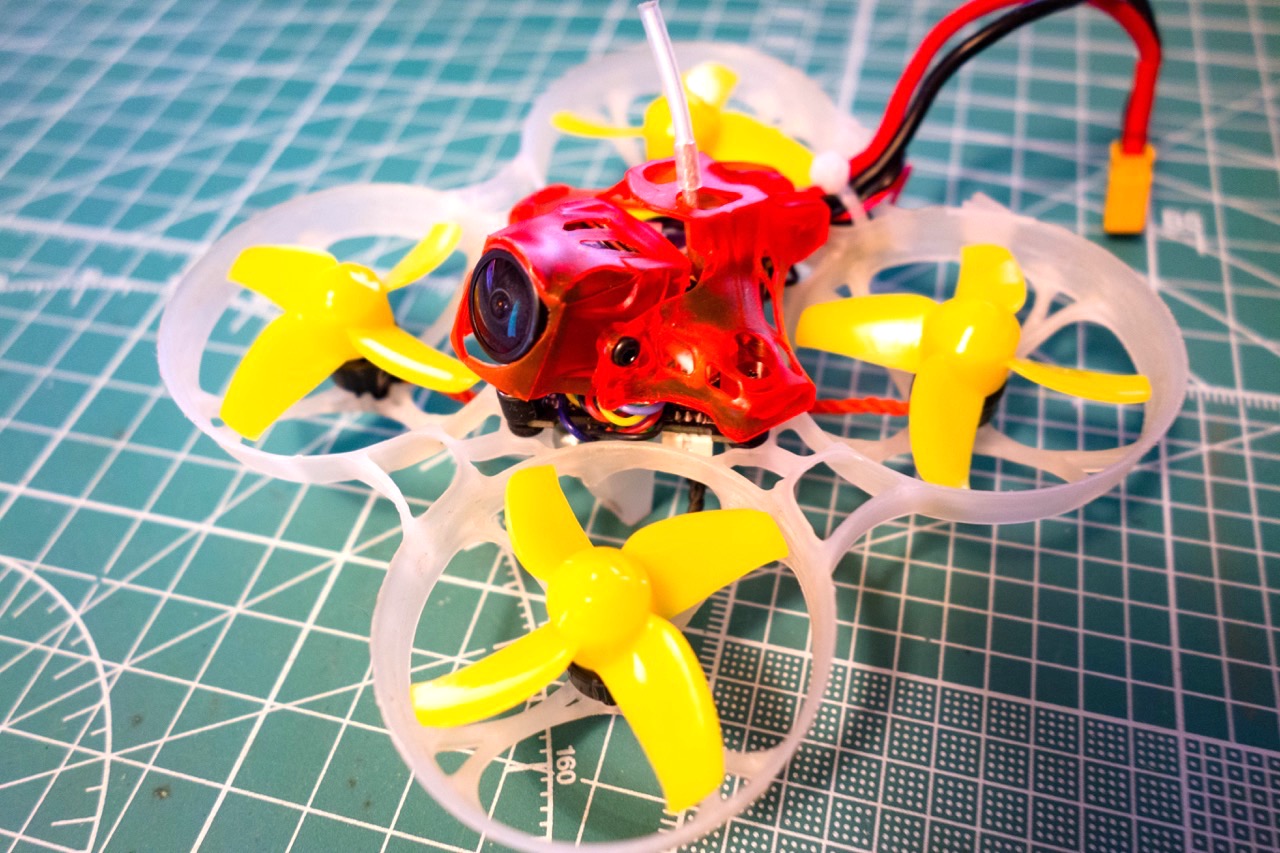
VTXの上に配置すればキャノピー内に収めることも出来ますが、内部のケーブル等によりキャノピーの取り付けが大変だったので今後のことを考え今回ケーブルを延長してキャノピーの外に取り付けています。
まとめ
Caddx EOS2カメラにはアスペクト比が16:9のものと4:3タイプのものがあります。
Eachine TRASHCANには標準で16:9タイプのものが搭載されていました。
私は現在Eachine EV200Dゴーグルで使用していますが、16:9のアスペクト比では画面が非常に大きく感じられ(眼を左右に動かさないと全てを見きれない感じ!)、EV200D側の設定を4:3にして使用しています。
そのため、今回Mobula7アップグレードには4:3タイプのEOS2カメラを使用しました。
そして付属のAIOカメラと比べ非常に鮮明に見え操縦がしやすくなりました。

Eachine EV200Dゴーグルの解像度は1280×720と非常に高いためEOS2カメラなど解像度の高いカメラを使用すると本来の能力を発揮できるのだと感じます。

今回のカスタマイズでMobula7くんは、外部受信機&200mW出力VTXで高画質EOS2カメラ搭載という構成になりました。
これで野外飛行2セル機としては申し分ない構成になったかと思います。
https://youtu.be/ADER_sfKdJ4

今までいろいろとMobula7くんに手を加えてきましたが、最終的にTRASHCANと同様の構成になった感じです。
デフォルトの状態でこの構成になっているTRASHCANくん、なかなかのものだ!
この両機の飛びの違いもまた紹介できたらと思います。

あとやりたいのはフレームをBETAFPVのものに変更など考えています。
今のところV3フレームは丈夫で壊れていませんが、BanggoodさんやGeekBuyingさん等海外サイトからは購入できますが、国内ショップではおそらく販売されていないので入手に時間がかかります。
Beta75 Pro2 Frameなどにしておけば国内ショップで容易に手に入るため急な破損等不測の事態に対応しやすいから良さそうです。
またV3フレームではサイズ的に使えなかったGemfanペラも使えるので良さそうです!
しかしMobula7やTRASHCANのキャノピーをBETAFPVフレームに固定するためには、少し工夫が必要なようで・・・
それはまた別の機会にご紹介できたらと思います。
Happymodel Mobula7 75mm Crazybee F3 Pro OSD 2S Whoop FPV Racing Drone

Caddx Turbo EOS2 4:3 1200TVL 2.1mm 160 Degree 1/3 CMOS Mini FPV Camera

Happymodel Mobula7 Part Upgrade Whoop_VTX 5.8G 40CH 25mW~200mW Switchable VTX for RC Drone

Eachine TRASHCAN 75mm FPV Racing Drone Spare Part RC Head Cover Camera Canopy
Happymodel Mobula7 Part V2 Angle Adjustable Camera Canopy for RC Drone Caddx EOS2 Camera
 【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。
【Supra7 Pro】機体スペックが高い75mm 3セルWhoop!Betaflightの設定をやってみる。  【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!
【Supra7 Pro】フルスペック75mm 3セルWhoop『Supra7 Pro』。Mobula7やTRASHCANの上位互換的な機体です!  【Toothpick化】Happymodel Mobula7をToothpick化してみた!2セルToothpick機だけどコイツもよく飛んでくれます!
【Toothpick化】Happymodel Mobula7をToothpick化してみた!2セルToothpick機だけどコイツもよく飛んでくれます!  【Mobula7】Mobula7用V3フレーム&ピッグテールをXT30プラグに変更!ダクト部分のサイズが少し小さくGemfanペラは使えないようですね!
【Mobula7】Mobula7用V3フレーム&ピッグテールをXT30プラグに変更!ダクト部分のサイズが少し小さくGemfanペラは使えないようですね!  【Mobula7】外部受信機(Frsky xm+)を取り付ける!TX(送信)RX(受信)UARTの理解が深まり非常に勉強になりました。
【Mobula7】外部受信機(Frsky xm+)を取り付ける!TX(送信)RX(受信)UARTの理解が深まり非常に勉強になりました。  【Mobula7】2SブラシレスWhoop『Happymodel Mobula7』が仲間入り!1Sブラシレス機UR65に慣れたらステップアップにオススメの機体です!
【Mobula7】2SブラシレスWhoop『Happymodel Mobula7』が仲間入り!1Sブラシレス機UR65に慣れたらステップアップにオススメの機体です!  【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!
【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!  【URUAV UR85】85mmサイズのWhoop練習機としてUR85(ノーマルバージョン)の構成を考えてみる!
【URUAV UR85】85mmサイズのWhoop練習機としてUR85(ノーマルバージョン)の構成を考えてみる!  【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!
【Makerfire Armor 85 HD】Betaflightの設定やブザーの取り付けをしたのですが・・・。FCの仕様上、ブザー設置にはリソースのリマッピングが必要でLEDストリップとの併用は難しく手こずりました!  【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ!
【Happymodel Sailfly-X】Caddx Turbo EOS2カメラ&200mW出力VTXにカスタマイズ!  激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました!
激突大破したBeta85X HD復活!Caddx Turtle V2用の補修パーツがいろいろ出ていて助かりました!  【Emax TinyhawkS】出力の高いVTXにカスタマイズ!内部にスペースが確保できるので今後のカスタマイズにもよさそうです。
【Emax TinyhawkS】出力の高いVTXにカスタマイズ!内部にスペースが確保できるので今後のカスタマイズにもよさそうです。  【Emax Tinyhawk Freestyle】1セルの飛びに驚き!1〜2セル仕様にXT30プラグを追加&バッテリーマウント位置を変更し不満点を改善!
【Emax Tinyhawk Freestyle】1セルの飛びに驚き!1〜2セル仕様にXT30プラグを追加&バッテリーマウント位置を変更し不満点を改善! 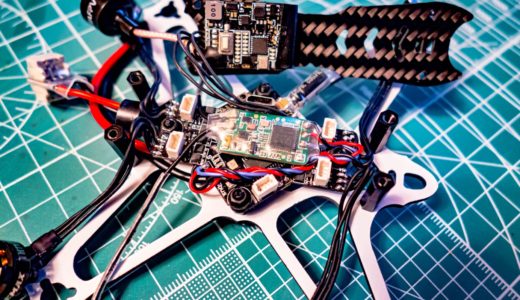 【Emax Tinyhawk Freestyle】これまでのカスタマイズを振り返り、いろいろ検証してみた!
【Emax Tinyhawk Freestyle】これまでのカスタマイズを振り返り、いろいろ検証してみた! 

コメントを残す