
前回『1セルブラシレスWhoopといえば『Eachine US65(URUAV UR65)』は外せない!3台目がやって来たので最短で最適な構成にカスタマイズしてみました!』の続きとなります。
1セルブラシレスWhoopの代表機とも言えるEachine US65(URUAV UR65)、大好きな機体の1つで当ブログでもカスタマイズ等何度もご紹介してきました。
当ブログへの問い合わせもこのUR関係の話が一番多く、その中でも初めて飛ばされる方からのバインドやBetaflight設定の問い合わせを多数頂いております。
カスタマイズ等の話は多数ご紹介させてもらっているのですが、バインド方法やBetaflight設定の話はあまり書いていなかったので、今回、バインドから飛ばせる状態にするまでの最低限のBetaflight設定をご紹介しようと思います。
目次
【UR65 & US65】バインドから飛ばせる状態にするまでの最低限のBetaflight設定!
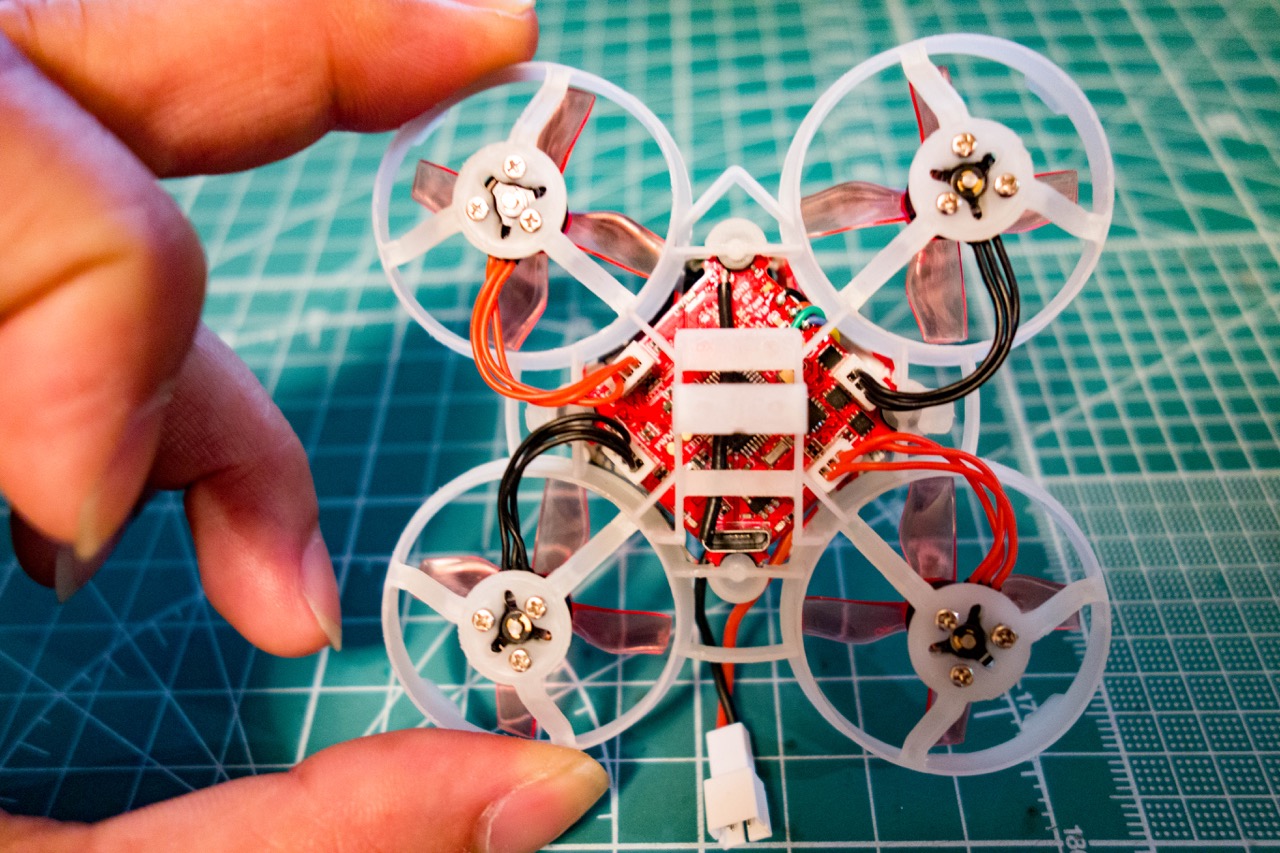
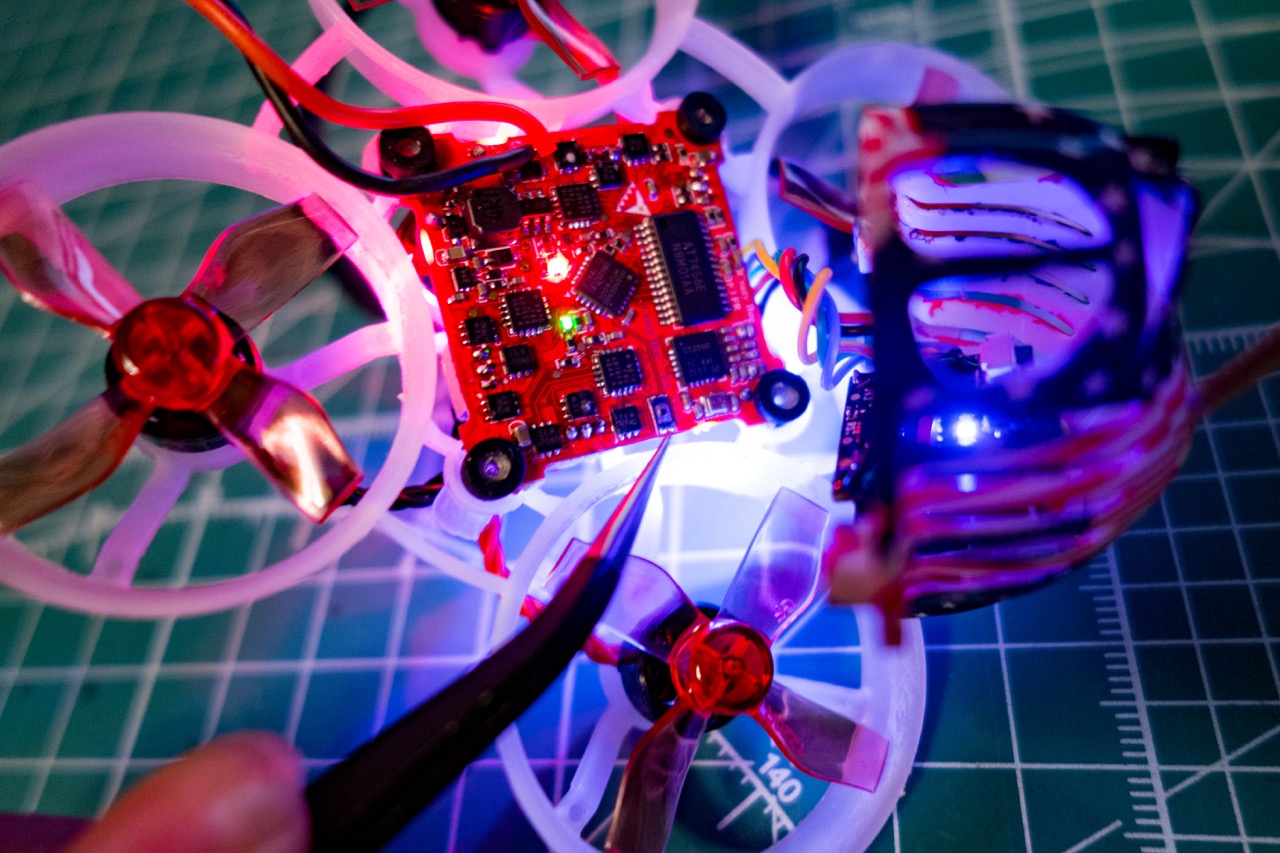
まずは現在のEachine US65の機体構成をご紹介しておきます。

標準フレームは非常に弱くフレーム折れが頻繁に発生する為、Beta65 Proフレームに載せ替えています。


また標準の0603モーターのシャフト径が0.8mmと細く、こちらもシャフト折れをよく起こすのでシャフト径1.0mmのモーターに交換しています。
0603モーターから08系のモーターに載せ替えるとパワフルかつ飛行時間もかなり延びるため、BETAFPV製の0802(175000KV)モーターに載せ替えています。
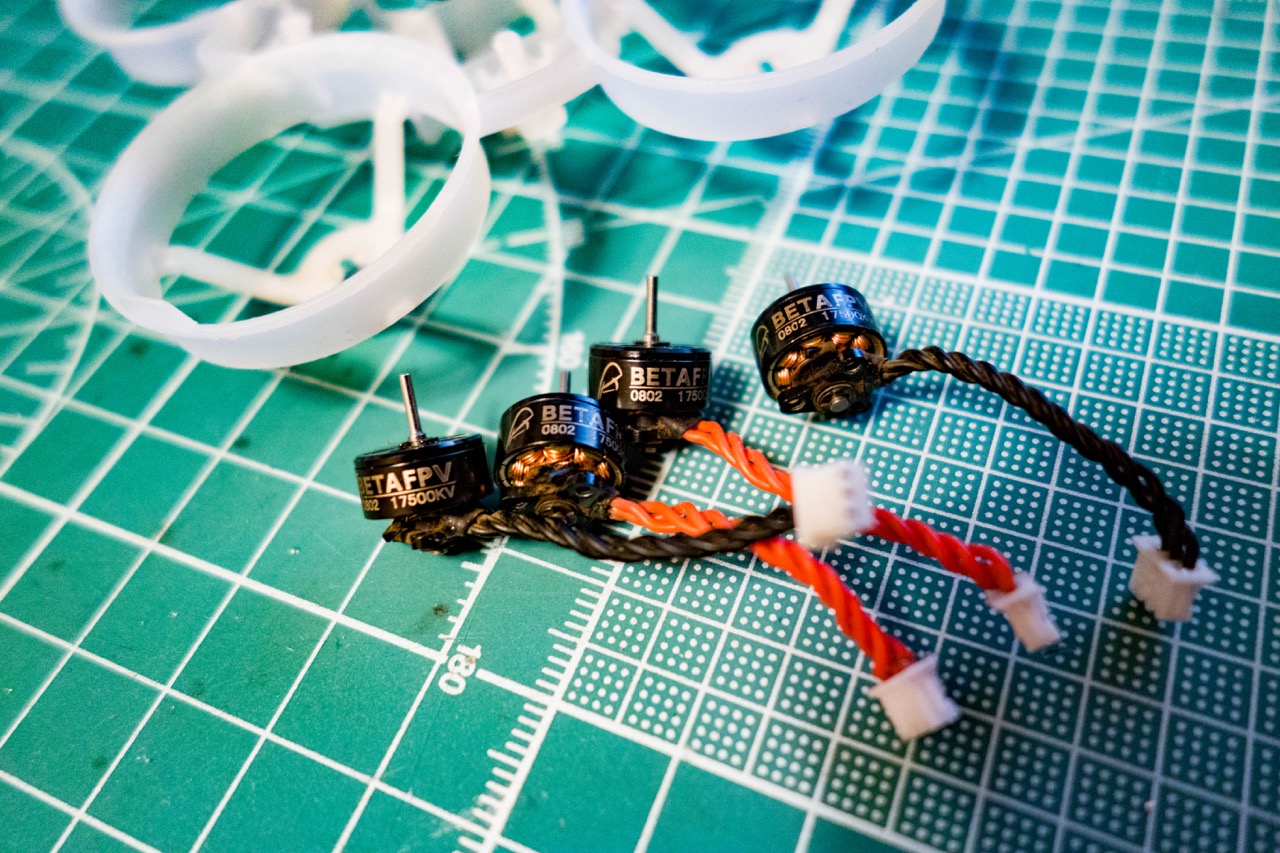

そして、Prop Wash対策として後で説明しますが[モーター回転方向を逆転]設定をしていますが、それに伴いモーターの配置を物理的に変えています。(BLHELIでreversed設定でも問題ありません!)

それではUS65 &UR65のバインドからBetaflight設定をやっていきましょう。
Betaflight 設定 & バインド!
ここからBetaflightの設定に移りますが、飛ばせる状態にするまでの最低限の設定に限定してご紹介したいと思います。
デフォルトの設定値を保存!
まずは初期状態の設定を保存しておきます。
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。

ポート設定!
ポート設定はデフォルトの状態で特に問題なさそうですね!

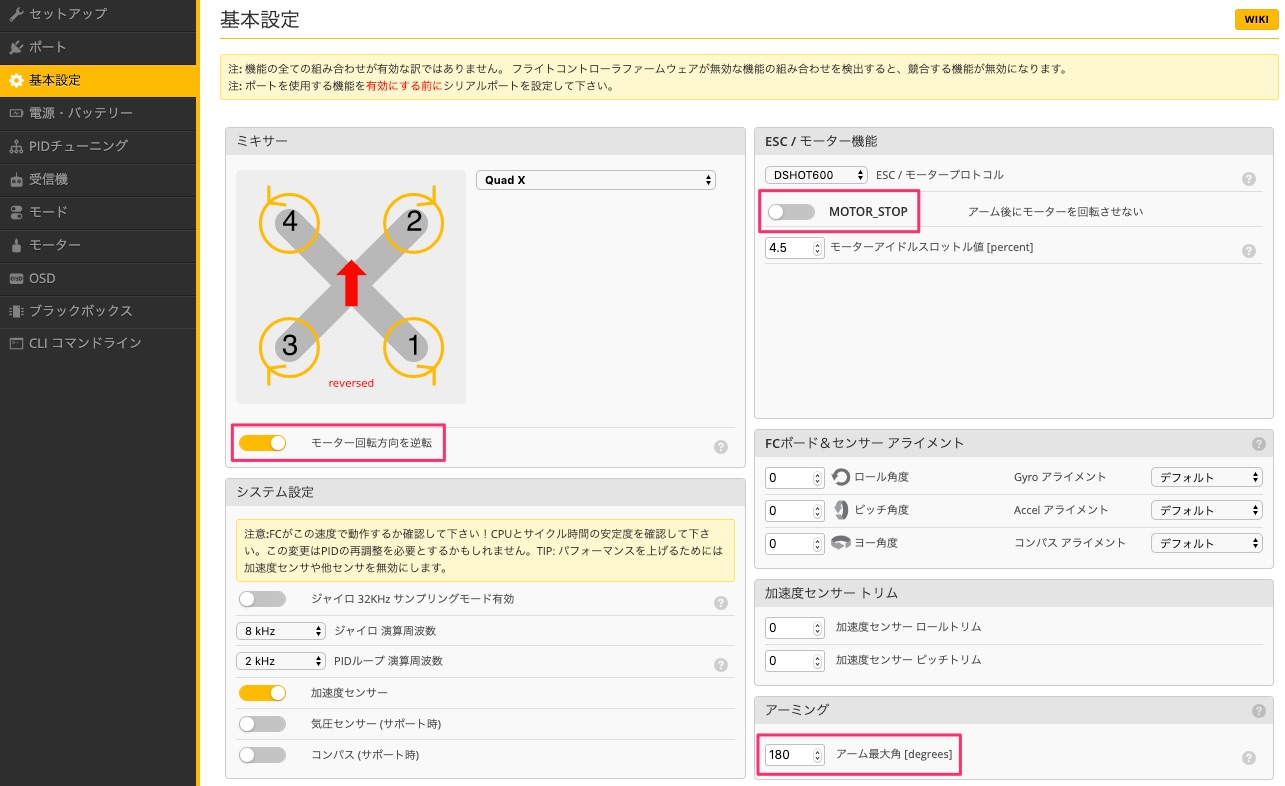
基本設定!
デフォルトで[モーター回転方向を逆転設定]にされていないので、Prop Wash対策のために逆転設定にします。
US65(UR65も同様)の場合、下写真のように配線が赤色モーターと黒色モーターをペラごと入れ替えれば完了です!
またBLHELIで全モーターにreversed設定をする方法もあります。
こちらは後述します。
MOTOR_STOP(アーム後にモーターを回転させない)をオフに変更。
アーミング角度をデフォルトの25°から180°に変更しました。
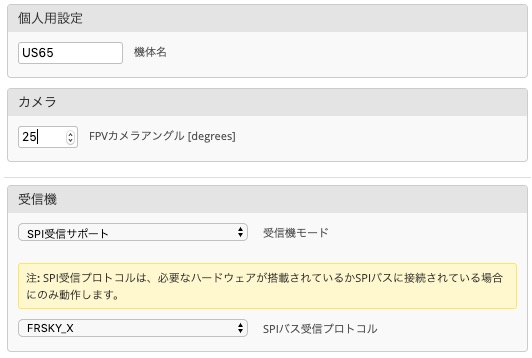
機体名を入力し、カメラアングルを25°に設定。
受信機設定は、FRSKY_X(D16)に設定しました。
BEEP設定はデフォルトで全てオン設定になっていますが特に問題ないですね。
Dshotビーコントーンをオン設定に変更しました。

電源・バッテリー設定!
バッテリー容量を250mAhに設定しました。
その他は特に初期状態の設定で問題ないようですが、HVバッテリー使用がメインとなりそうなので最大電圧を4.5Vに上げ、警告電圧及び最小電圧を少し下げました。
あとは飛ばしながら微調整していけばいいと思います。

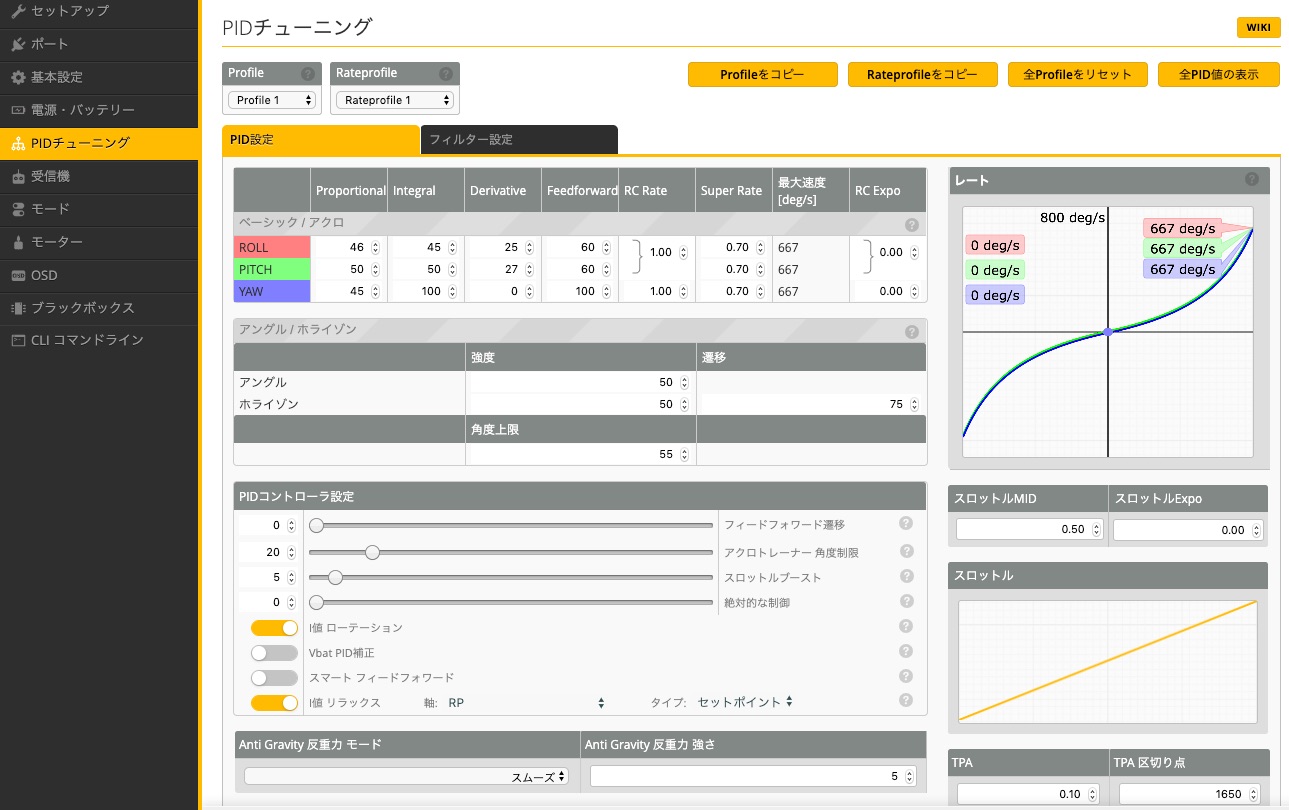
PIDチューニング!
デフォルトで設定されているPID設定は以下の1つのみです。
設定は普段飛ばされている機体を参考にお好みで設定してみて下さい。
これからUR65を飛ばそうとお考えの方は、特に変更する必要はないと思います。
機体とのバインド!
ここまで設定ができたら機体と送信機とのバインド作業に移ります。
USB接続のみでバインド作業はできます。(バッテリー接続の必要はありません)
USB接続し電源が供給されている状態でBINDボタンを2秒以上押し続けるとFCがバインドモードに入るので、送信機側の[BIND]ボタンを押しバインドします。
送信機とのバインドが完了したら、一旦USB接続を解除し電源オフ後、もう一度Betaflightに接続し他の設定をしていきます。
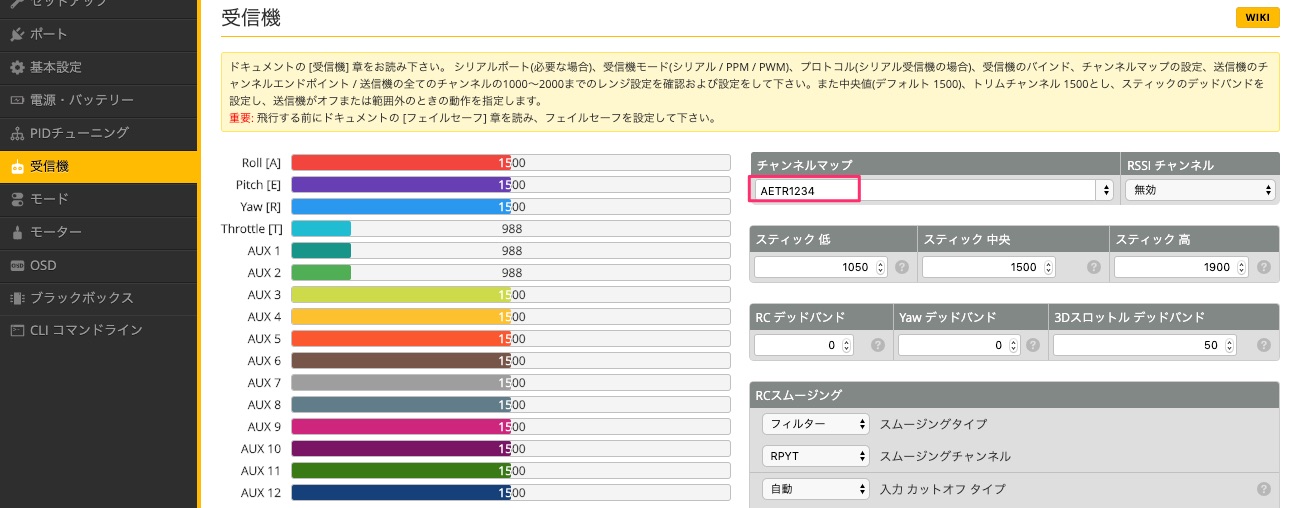
受信機設定!
送信機とのバインド作業が完了したら次に【受信機】タブへと移ります。
チャンネルマップをAETR1234に設定。(ここではFC内蔵受信機がFrskyで説明していきます。)
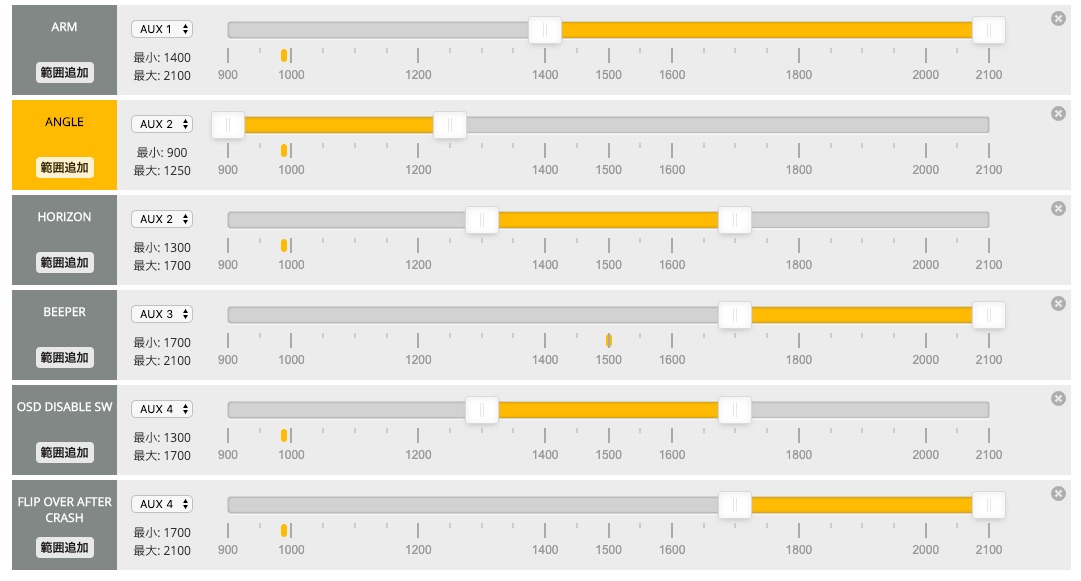
モード設定!
初期状態ではARM・ANGLE・AIR MODE・FLIP OVER AFTER CRASHが設定されています。
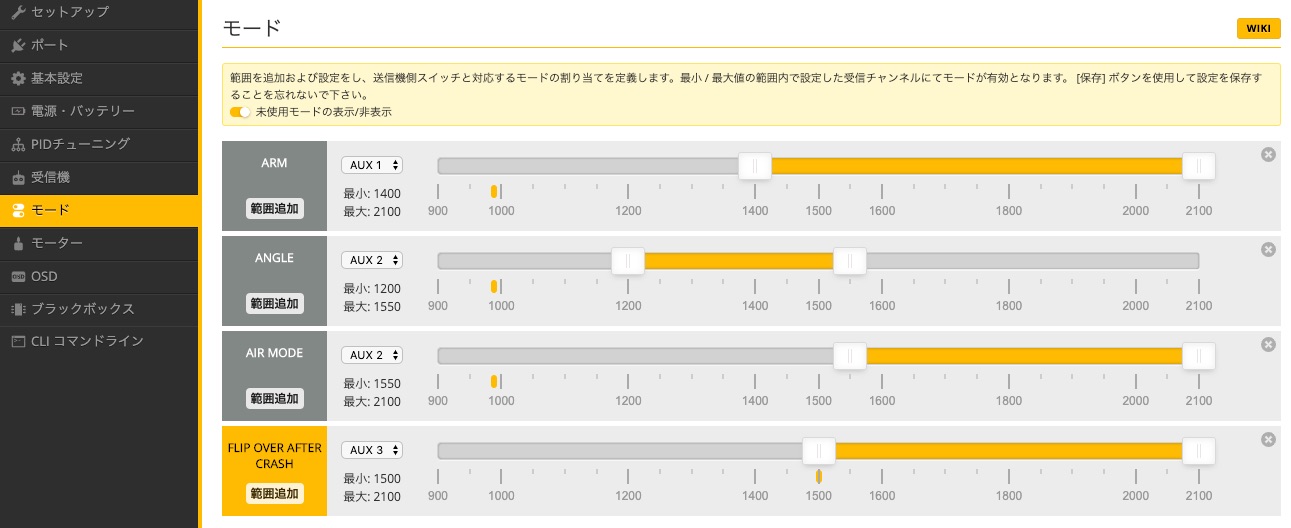
最低限の設定(フライトモード・ブザー等)を追加します。
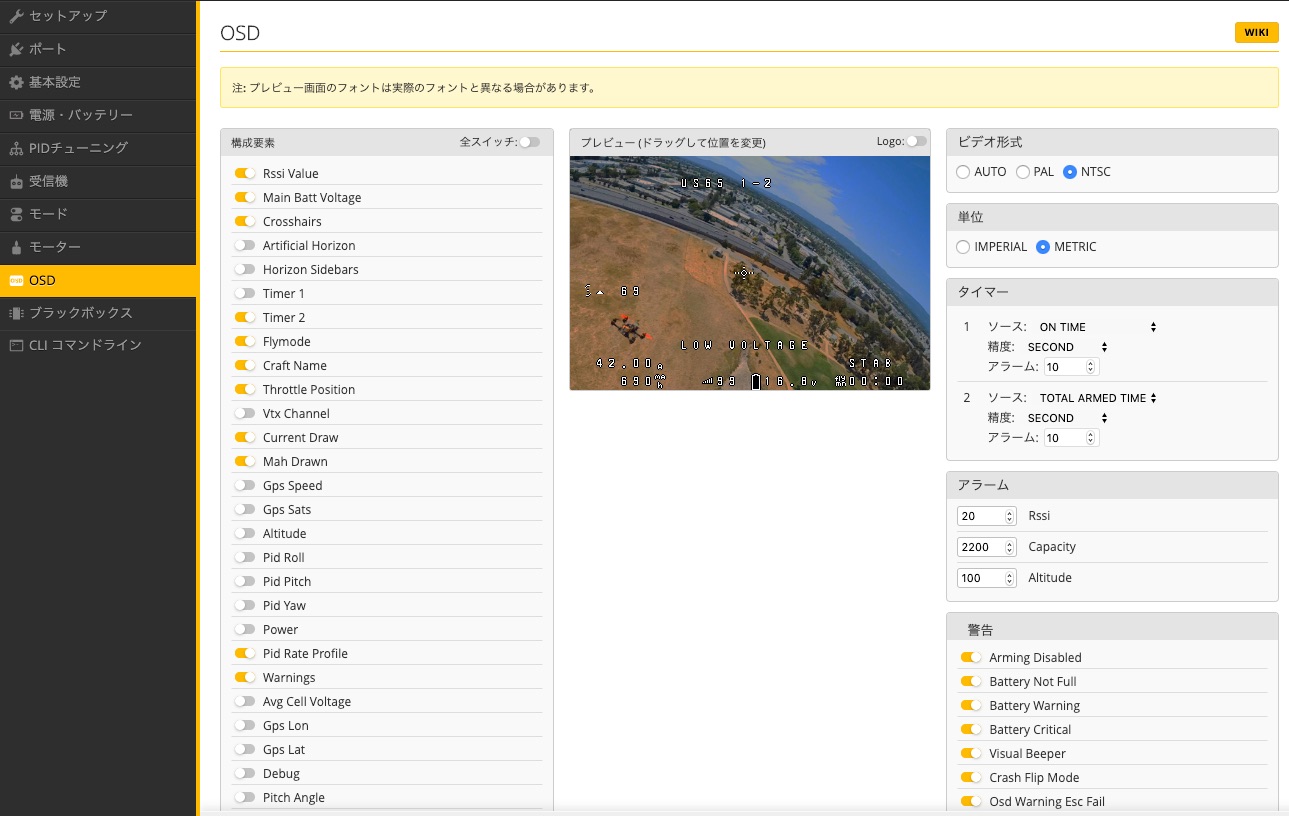
OSD設定!
こちらはお好みで設定して下さい!
VTXのBand & Channelの設定!
ゴーグルに映像を送信するためのVTXの送信周波数を設定します。
【CLIコマンドライン】から設定していきます。
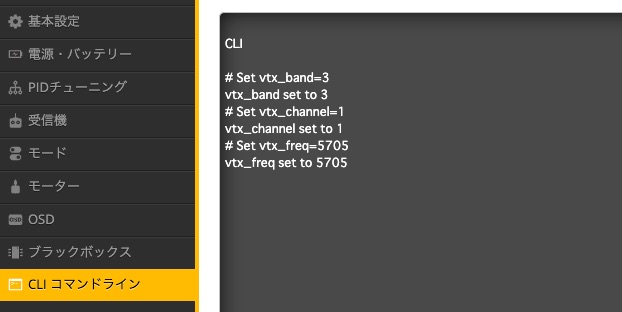
Set vtx_channel=1
Set vtx_freq=5705
save
設定データの保存!
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
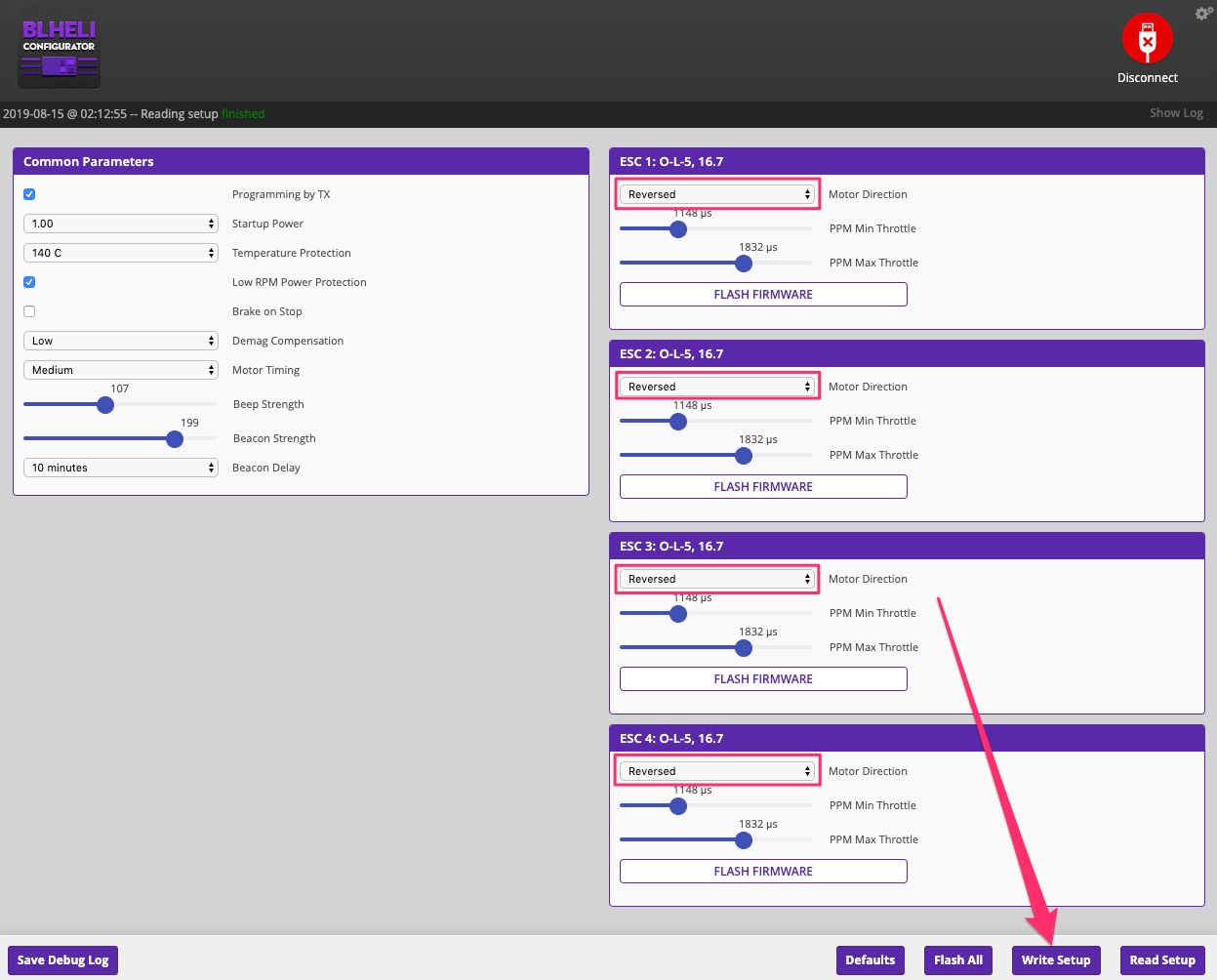
BLHELIでの設定!
上記のBetaflight設定でProp Wash対策としてモーター回転方向を逆転設定にしました。
その際に物理的にモーターの配置を入れ替えた場合は必要ありませんが、BLHELIからの設定でモーター回転を逆転させても問題ありません。(ペラの入れ替えは必要ですが!)
その際は、全てのモーターをreversed設定して完了です!
まとめ!
以上でUS65(UR65も同様)でのバインドから飛ばせる状態にするまでのBetaflight設定は完了です!
あとは飛ばしながら微調整等していけば問題ないかと思います。


 【UR65】角度調整ができ丈夫なMobula7キャノピーに載せ替え!ストックカメラにオススメな『Eachine TX06 AIO Camera』もピッタリマッチ!
【UR65】角度調整ができ丈夫なMobula7キャノピーに載せ替え!ストックカメラにオススメな『Eachine TX06 AIO Camera』もピッタリマッチ!  0802モーターに載せ替えたUR65では高画質1200TVLカメラ『Caddx FireFly』も楽々持ち上げてくれ飛行も超安定!
0802モーターに載せ替えたUR65では高画質1200TVLカメラ『Caddx FireFly』も楽々持ち上げてくれ飛行も超安定!  【URUAV UR65】シャフト径1mmのBETAFPV 0603 19000KVブラシレスモーターに交換。飛び方がどう変わるか検証してみた!
【URUAV UR65】シャフト径1mmのBETAFPV 0603 19000KVブラシレスモーターに交換。飛び方がどう変わるか検証してみた! 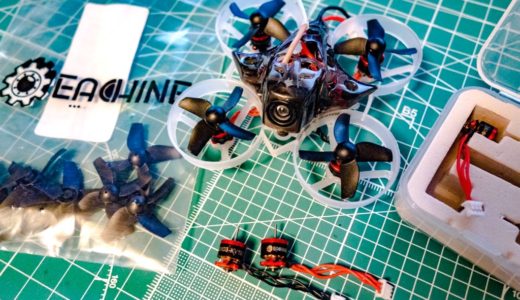 【Eachine US65】シャフト折れ頻発で使わなくなっていた標準モーターが非常に飛ばしやすい事に気付いたという話!
【Eachine US65】シャフト折れ頻発で使わなくなっていた標準モーターが非常に飛ばしやすい事に気付いたという話!  【Eachine US65】US65のピッグテールをBT2.0に変更、フレームもMeteor65仕様にしてみました!
【Eachine US65】US65のピッグテールをBT2.0に変更、フレームもMeteor65仕様にしてみました!  【URUAV UR65】BETAFPV 0802 17500KVモーターに交換!パワーアップ&飛行時間大幅アップという驚きの結果に!
【URUAV UR65】BETAFPV 0802 17500KVモーターに交換!パワーアップ&飛行時間大幅アップという驚きの結果に!  勝手にTop3!今年ハマったWhoopくんランキング2019!
勝手にTop3!今年ハマったWhoopくんランキング2019!  UR65のフレームをBETAFPV『Beta65 Pro Micro Brushless Whoop Upgraded Frame』に交換しモーターシャフト折れ&フレーム割れ問題を改善!
UR65のフレームをBETAFPV『Beta65 Pro Micro Brushless Whoop Upgraded Frame』に交換しモーターシャフト折れ&フレーム割れ問題を改善! 

初めてドローンの設定をするのに参考にさせていただきました。UR65とラジオマスターTX16Sを使っての設定ですが、アーム無効フラグ THROTTLE MSPの表示が出てしまいます。THROTTLEのエンドポイントは885まで下げてあります。モードのところもアーム無効と赤色で表示されます。原因解決のため、いろいろなブログを参考にして設定してみましたが、解決には至っていません。初飛行できるようご助言をいただけたら幸いです。よろしくお願いします。
US65を注文したばかりで、いろいろ情報をさがしていたらたどり着きました。
大変丁寧に紹介されており、もろもろ眼からウロコです。
2点おしえて頂きたいのですが、
①バッテリーのコネクタなのですが、ブログで紹介されているのはJST-PH形状のようなのですが、私が購入したものはGNB27 2.0というものでした。これはコネクタを入れ替えているのでしょうか?
②US65はコネクタが2本でているのですが、これは2本を直列につないで2セルとして使うものなのでしょうか?また片方だけにバッテリーを入れても動くのでしょうか?
[…] 【Eachine US65(URUAV UR65)】バインドから飛ばすまでの最低限のBetaflight設定をやってみる! […]
購入した機体のFCが壊れてしまったので、FCだけ購入して載せ替えました。
オートサーチもしました、チャンネルとバンドも手動で合わせましたが映りません。。。
もう一度ベータフライトの設定項目を見直してみます!
迅速な回答ありがとうございました。
早急なご回答ありがとうございます。
回答いただいた内容は一通り試してはいるのですが。。。
VTXは標準でついているものを使用しています。
念のため違う機体(BWHOOP)につけて確認したら、映像は映りましたのでVTXの故障ではないと思います。
そもそもバンドとチャンネルを、BFのCLIコマンドラインに入力をしないと、映像は映らないのでしょうか?
機体を購入して当初の設定の時は、CLIに入力はしませんでした。
FCが原因なのかなと疑っていますが。。。
CLIコマンドラインの入力でミスした場合、訂正はできるのでしょうか?
たくさん質問してしまって、申し訳ございません。
あっ!ダメでしたか。
不思議ですね!
CLIコマンドラインからの設定は単純にVTXの物理スイッチを押すのが面倒なのでコマンドで設定した方が手っ取り早いですよーという意味合いです。
VTXのボタンをポチポチやるのもコマンドから設定するのも結局はやっていることは同じなんですけどね。
VTXのLEDの点灯表示で周波数(バンドとチャンネル)はゴーグルの設定と合ってるんですよね(
このFCに繋いだ時に周波数が変わるってことなんですかね?)
オートサーチでもみつからないですかね?
見つかればSmart Audioで目的の周波数に変更とかできるのですが。
コマンド訂正はもう一度入力し変更すれば問題ないかと思うのですが。
すいません。
最初ご質問頂いた文章もう一度見てみましたが、US65のFCをCrazyBee F3に変えたとあるのですがもともとUS65はCrazyBee F3 FCが使われていますが・・・他の別のFCに変えたということなんでしょうかね?
最近マイクロドローンにハマり、こちらのブログが大変参考になり拝見させていただいています。
US65のFCをCrazyBeeF3に変えたのですが、ゴーグルに画像が映りません!
記事にあるVTXの設定を行いましたが、CLIの設定で何度か入力ミスをしました。
FATSHARKHDO2を使用しています。
お知恵を頂けると助かります。お手数ですがよろしくお願いいたします。
ご質問、ありがとうございます。
VTX周波数の変更コマンド、BFのバージョンで使えないとかあるのかな?
ごめんなさいこのあたり確認出来ていませんが、もし使われているVTXがUS65標準のAIOタイプのものならVTXスイッチから調整した方が手取り早いかもしれませんね。
一般的なAIOタイプのカメラなら、スイッチの単押しでチャンネル、長押しでバンドが切り替えれます。
あとはLEDの点灯で確認し目的の周波数に変更してやれば問題ないかと思います。
また、よく私もあるのですがBetaflightの設定等手間取りVTXがどんどん発熱して故障なんて事があります。
一度Fatshark側でオートサーチをかけちゃんとVTXから電波が来ているのか確かめてみるのもいいかもしれませんね!
あっ!あとはCLIコマンドラインで入力の際は、一行ずつ[リターンキー]押して下さいね。
そして最後に[save][リターン]で設定完了です。
大変参考になる記事ありがとうございます!
こちらの設定完了後に飛ばそうとしてもモーターが動かないのですが、
DJIのようにプロポ側で八の字を書くなど設定があるのでしょうか。
それともモード2の場合うまく設定できていれば、左側のスティックを上にするだけでモーターがうごくものでしょうか。
お手数ですがご回答いただけますと大変うれしいです!
DJIの事は分かりかねるのですが、Whoopの場合(今回はUS65だと思いますが)バインドしてアームすれば左スティック(スロットル)操作でモーターは動き出します。
バインドが出来ているのか?
アームスイッチの設定?
等々あるかと思いますが、バインド&アームまで問題なければOSD画面に何かしらの警告(エラーメッセージ)が表示されているかと思うのでまず確認してみて下さい。
よかった〜〜!(^^)
私だけが苦しんでいたわけじゃなかった!
FCが火花散らしてお亡くなりになったんで、予備のFCを乗せて、最新のバージョンBetaflight5.01で設定しようとしましたが、バッテリーや電圧設定、モード設定、OSD設定が全くできなかった!色々調べて、バージョンを落として4.00で再度設定したら出来ました!こんなことあるんですかね?機体セットで買った時は最新のバージョンで設定できたんですが…。今後バージョンを簡単にあげれるんだろうか…。飛ばす以外で悩みが尽きません
私も同様なことがあり、バージョンを下げて使っています。
やはり半田ごてを専用にしないといかんかぁ
いつも楽しく拝読させたいただいています。逆回転仕様いつかやりたいですねー(^^)
新しく手に入れたFCにロスト防止のブザーつけようとしました!結果、火花が飛んでFCがお亡くなりになりました
短絡したんかなぁ。まだ私にはハードル高すぎました
あらー!!
確かにURのブザー取り付けはピッチがかなり狭いので難易度高いですよね!
私なんてこのURのブザー取り付けのために新しく半田ごてを新調したぐらいですから。
まだこの3号機にはブザー付けてなく、昨日野外で飛ばしてみたのですが、野外ではブザーは必須ですね。
一度草むらに落ちたのですが探すのが大変で!
時間できたらこの子にもブザー取り付けてみます。