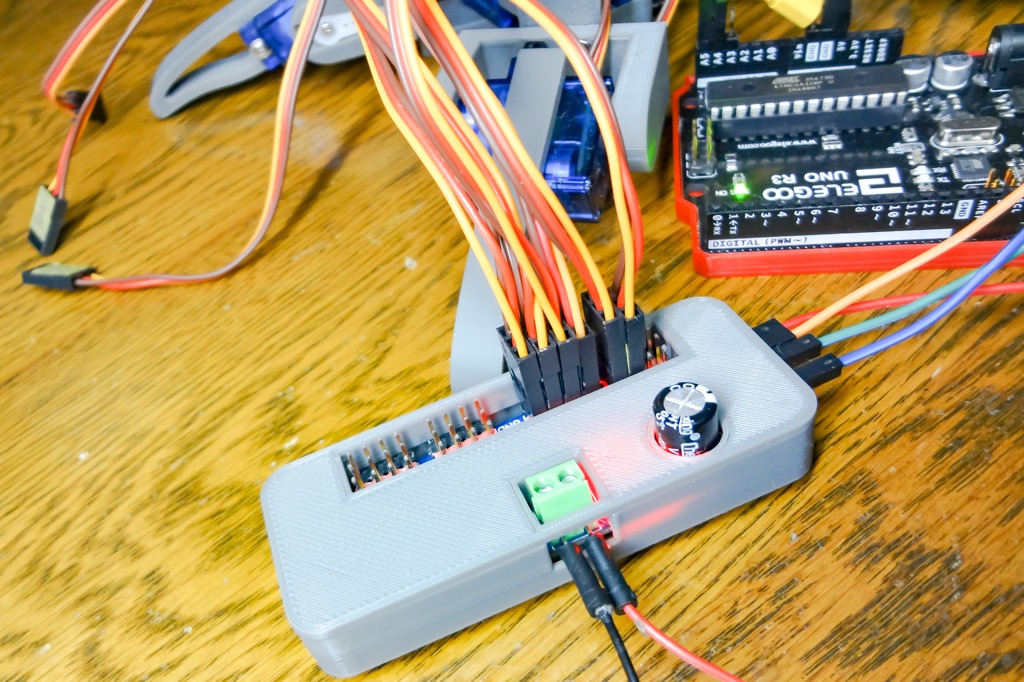
16CHのPWM制御サーボモータードライバPCA9685専用ケースを作ってみました。
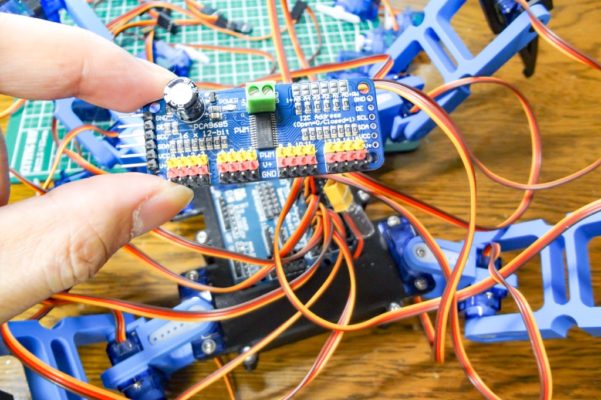
PCA9685サーボモータードライバは、ArduinoやRaspberry Piなどマイコンボードと接続することにより最大16台までのサーボモーターを制御できるモータードライバとなります。
I2C通信によりSCLピン(シリアルクロック)とSDAピン(シリアルデータ)の2本のみの接続(他にVcc/GNDも入れると4本)で多くのサーボモーターを同時に制御できるドライバとなり、さらに連結することにより理論的に最大992台のサーボを同時制御出来るというドライバとなります。
電子工作用途ではよく使われるドライバとなりご存じの方も多いはず!
そんなPCA9685サーボモータードライバですが、テスト環境等で使うには専用ケースがあると便利そう・・・実はTwitterをいつも拝見し刺激を受けているrobo8080さんが同様なケースを使われていて・・・
PCA9685のケースができたので、Grove用のケーブルも作った😁 PCA9685がケースに入っていると見た目がスッキリして良い🥰 pic.twitter.com/5zOn2w90xU
— robo8080 (@robo8080) July 3, 2021
確かにいろいろとテストする開発環境ではこのようなケースがあると便利ということで作ってみました。
思い立ったら何でも作れる、3Dプリンタってホント便利ですよね!
同様のことを考える方は多いようで、Thingiverseには既に数種類のPCA9685用ケースがアップされていました。
形状的にはどれも似たようなケースとなります。
そして3Dプリンタの導入で現在モデリングの勉強をしていることもあり、大抵のものは時間をかけてでも自分で作るようにしています。
そんなことで単純な形状のケースとなりますが作ってみました。
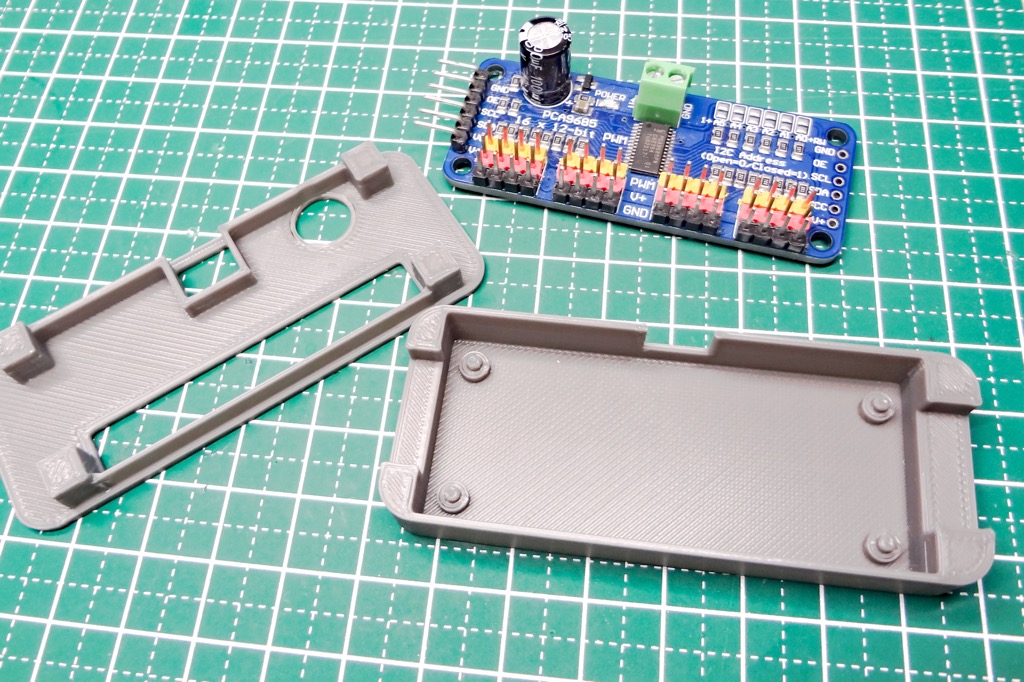
ケースを使ってテスト環境で使うとなると一番こだわりたいポイントとしてはケースの蓋がハメやすくて抜けにくくすること!

このような蓋をハメ込む形状では、ケース四隅にボスと言われる突起を付けてそこにネジ穴を作り4隅ネジ固定というのがケースとしては一番固定しやすい形状となるわけですが・・・
このPCA9685を電子工作のテスト環境で使うとなると、ネジ固定ではなく寸法公差を詰めカチッとハメ込む形状の方が使いやすいかな?ってことでネジ固定ではない形状で作ってみました。
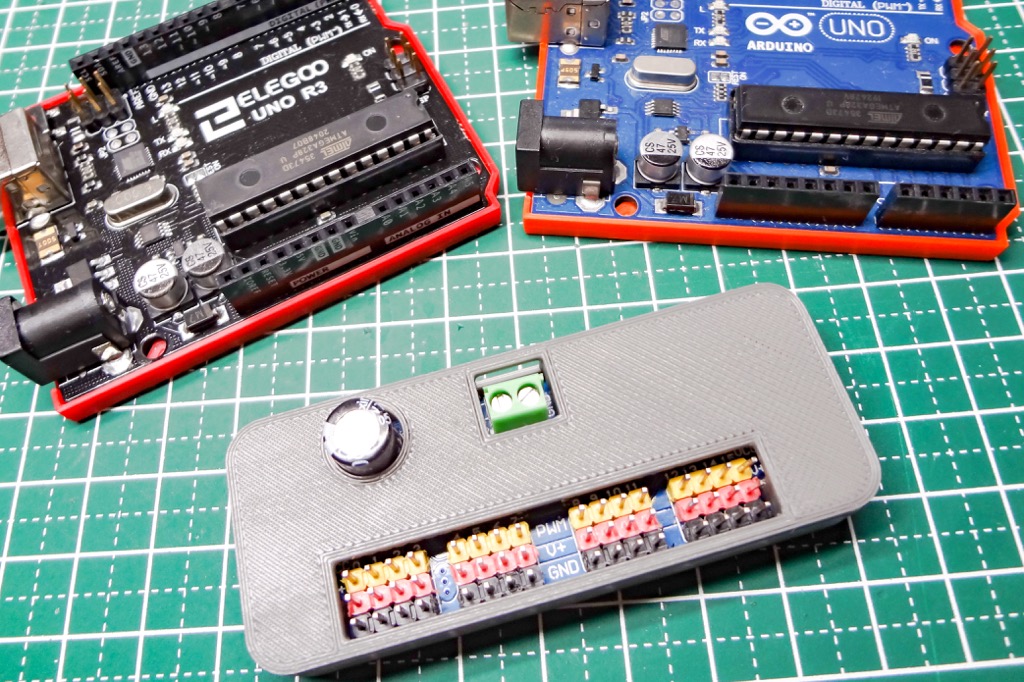
こんな感じにカチッとハマって抜けにくい・・・なかなかいいのではないでしょうか?
上手くこの感じを他の方の環境でも再現できればいいのですが・・・
この投稿をInstagramで見る
興味ある方はThingiverseの方にデータをアップしましたので使ってみて下さい!
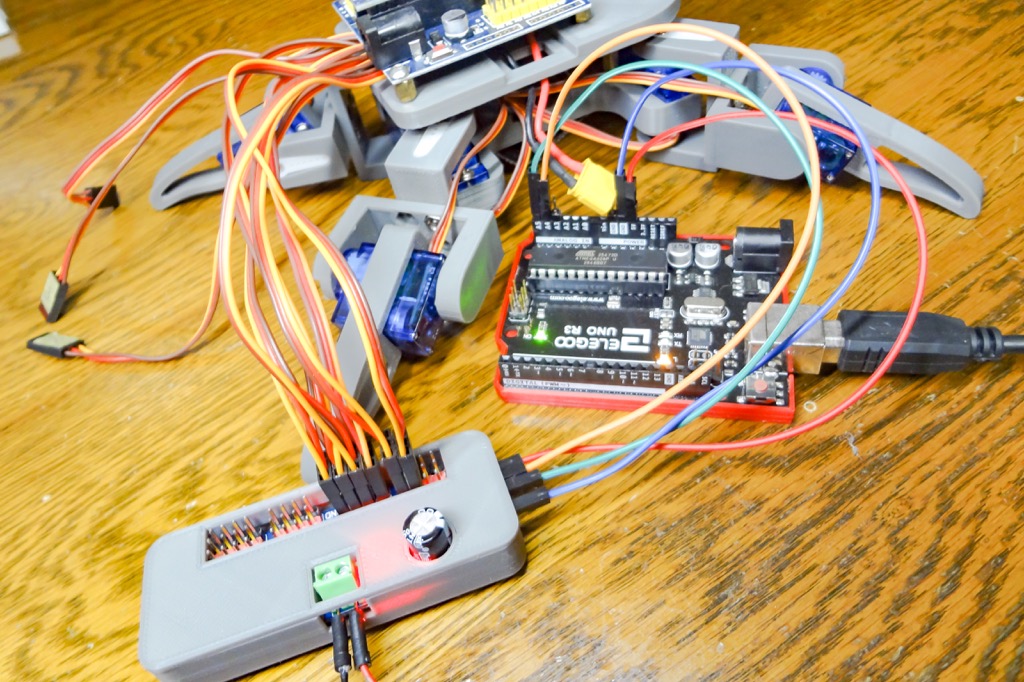
参考 16CH Servo Motor Driver PCA9685 Simple CaseThingiverseArduinoやラズパイ、そしてその他の電子パーツの基板は、その背面がはんだ付けされたパーツの足があり作業デスクに傷が付いたり、またケースがあった方が動かしやすいなどの理由でこのようなケースを装着して使うのは結構便利となります。
そんなことでサーボモータードライバPCA9685のケースを作ってみました。
ほんと電子工作と3Dプリンタの組み合わせって最強ですね!

 【Ender3 V2】標準で搭載されているストックFANで出来るファンカバーのカスタマイズ!【STLデータ公開】
【Ender3 V2】標準で搭載されているストックFANで出来るファンカバーのカスタマイズ!【STLデータ公開】  【3Dプリンタ】4040フレームに取り付けできるDC/DC降圧モジュール(LM2596)用ケースを作ってみました!【STLデータ公開】
【3Dプリンタ】4040フレームに取り付けできるDC/DC降圧モジュール(LM2596)用ケースを作ってみました!【STLデータ公開】  KAIWEETS KM601デジタルマルチメーターの立て掛けスタンドを作ってみました!【STLデータ公開】
KAIWEETS KM601デジタルマルチメーターの立て掛けスタンドを作ってみました!【STLデータ公開】  【3Dプリンタ】ドライボックスを購入。フィラメント保管用に作られたかのようなサイズ感で綺麗に収納できます!
【3Dプリンタ】ドライボックスを購入。フィラメント保管用に作られたかのようなサイズ感で綺麗に収納できます!  【3Dプリンタ】Amazonブランドのソケットレンチ(ラチェットレンチ)が3Dプリンタ用途で便利に使えてます!
【3Dプリンタ】Amazonブランドのソケットレンチ(ラチェットレンチ)が3Dプリンタ用途で便利に使えてます!  【Banggood】3Dプリンタ関連のお得な専用クーポンを発行して頂きました!(2021年10月版)
【Banggood】3Dプリンタ関連のお得な専用クーポンを発行して頂きました!(2021年10月版)  【3Dプリンタ】1層目が定着しにくい?定着があまく反りが発生する?マスキングテープを1枚貼るだけで効果は抜群でした!
【3Dプリンタ】1層目が定着しにくい?定着があまく反りが発生する?マスキングテープを1枚貼るだけで効果は抜群でした!  ペットボトルキャップサイズの可愛い小物入れを作ってみました!【STLデータ公開】
ペットボトルキャップサイズの可愛い小物入れを作ってみました!【STLデータ公開】 

コメントを残す