電子工作に3Dプリンタってほんと最強のコンビですよね!
昨年末あたりから電子工作という趣味を始めましたが、3Dプリンタという道具を導入し非常に役立っています。
どんな趣味にでも便利に使えるのが3Dプリンタですよね。

特に電子工作という趣味で言えば、ArduinoやRaspberryなどを使いハードを組みそれを動かすためのプログラムを作れても、最終的にはそれを活かすためのボディーやアームなどがなければ動かすことができません。
モデリングなどの知識も必要となってきますが3Dプリンタがあればそれらパーツをサクッと作って動かし、構造を理解する上でも非常に役立ちます。
そんな事で今回は電子工作をやられている方なら一度は作ってみたいと思われる事があるロボットアーム作りに挑戦してみました。
とは言っても簡単に作れるものではなく、現在非常に苦戦して製作している段階なので数回に分けてご紹介していこうと思います。(忘れてしまうので)
現時点では試作段階となり自分への備忘録的な内容となりますが、電子工作好きの方でこれからロボットアーム作りに挑戦してみたいと思われている方の参考になればと思います。
3Dプリントパーツで作るロボットアームに挑戦!
ロボットアームと一言で言っても形状はいろいろとあるかと思います。
以前、4足歩行ロボットを作ったことがありますが、単純に関節部分を2つ使い回転の動きを付ければ簡単な3軸タイプのアームを作ることができそうですが・・・
この投稿をInstagramで見る
今回は関節の形状を変えこのようなイメージで広い可動域を取れるタイプのものを考えてみました。
よく工事現場などで動いているショベルカーみたいな構造のものですね。(何という機構なのかな?)
三角関数の計算なんてすっかり忘れてしまいましたが、イメージ的にはこんな感じのアームを想定してモデリングしCAD上で動かしてみました。
この投稿をInstagramで見る
アームの長さや可動域等の計算は合っていると思います。
ベースが出来ればここからモデリングで肉付けして形状を作っていくわけですが・・・
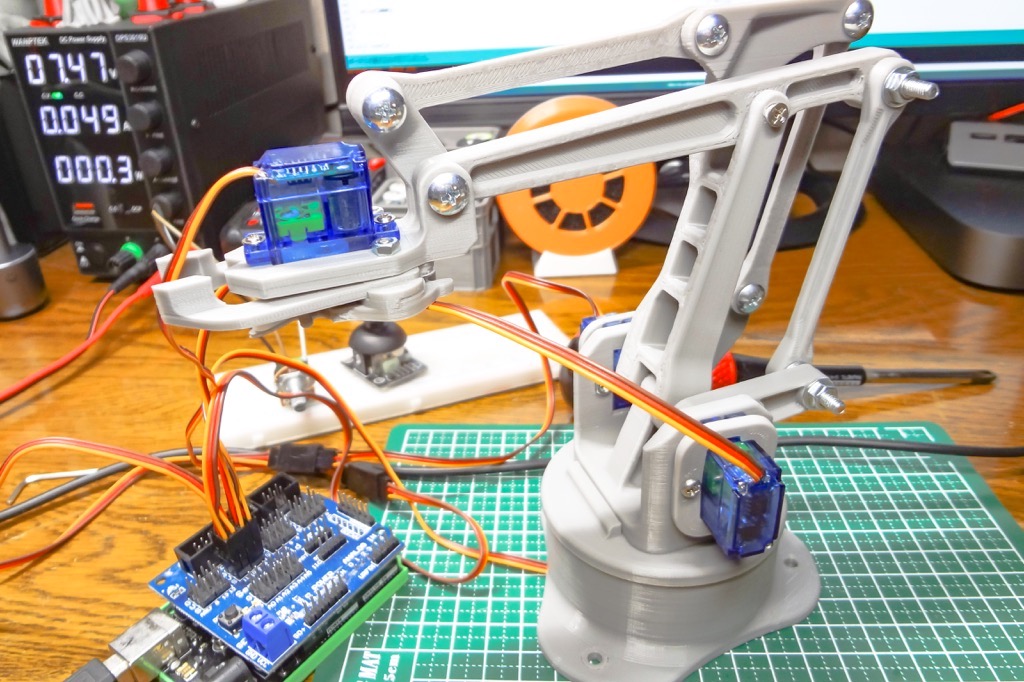
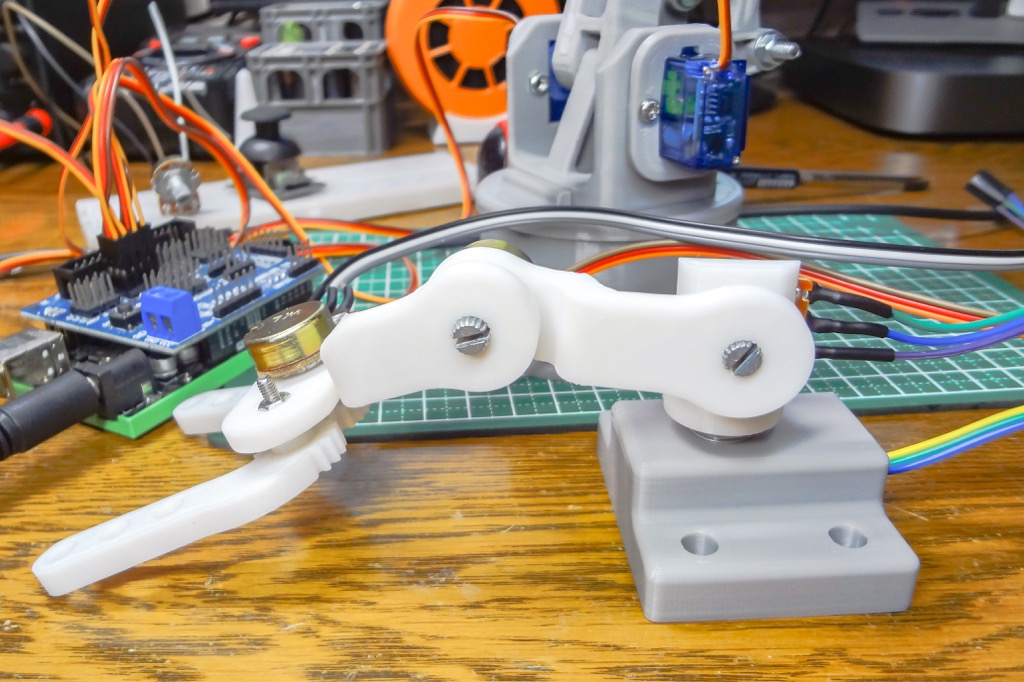
今回は同様な構造のもので非常に良いモデルがThingiverseにあったのでこれをテストモデルとして作ってみたいと思います。
関節を可動させる構造はほぼ同じでSG90などのミニサイズのサーボモーターを想定して作られたモデルなので動作や構造を理解しやすく、3Dプリンタでパーツを簡単に作れそうという事で選んでみました。
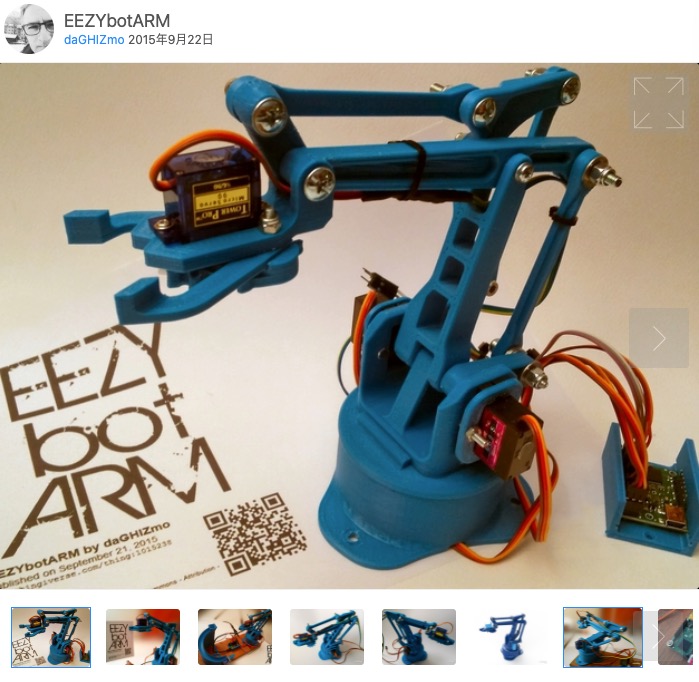
ミニサイズのアームなので半日あれば3Dプリントパーツは作れるかと思います。(そこそこパーツ数はありますが!)
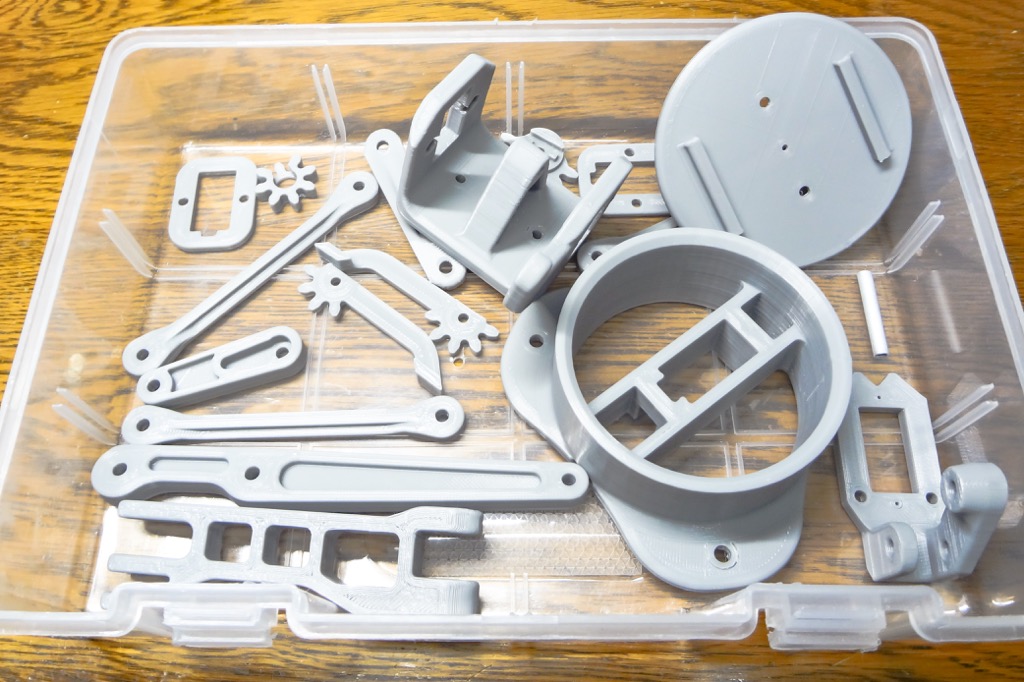
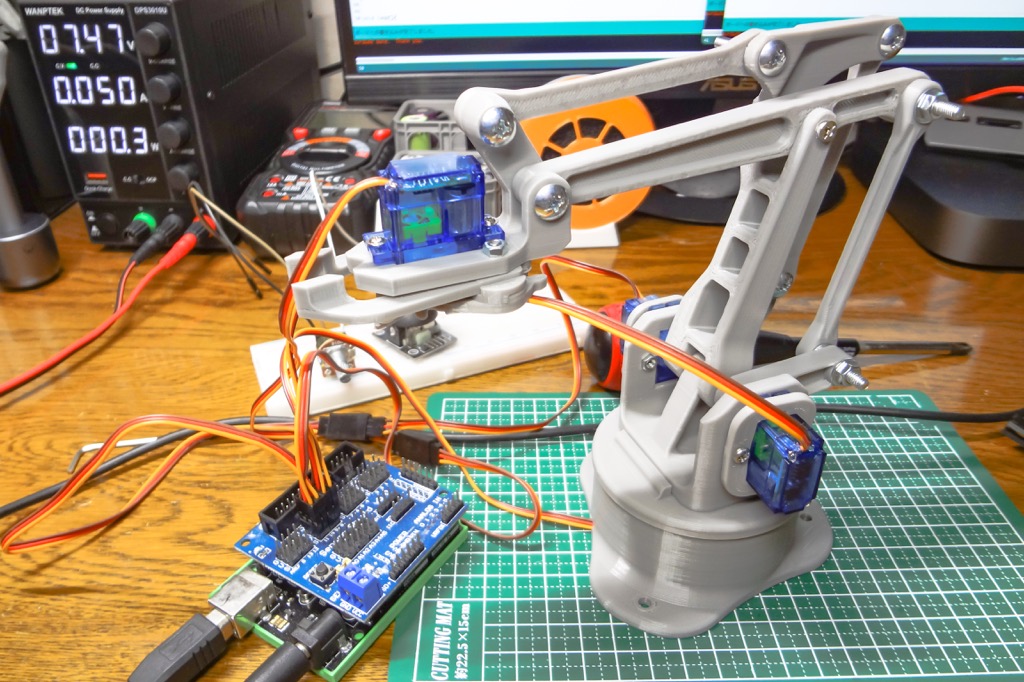
そして実際に作って動かしてみましたが、現在苦戦しています。
Arduinoで簡単なプログラムを組み一応はこのように動いてくれていますが、SG90サーボモーターではアーム部分の駆動にはパワー(トルク)が少し足りないようです。
https://youtu.be/rxt1oY5xSgM
製作者の方はアーム部分のサーボにはMG90を使われているようですね。
SG90と同型ですが内部のギアがメタル仕様になっているのがMG90となります。

プラスチックギアが使われているSG90よりも滑らかに動くようですが、私が作ってみた感覚だと90系のサーボでは初動のパワーが足りず指定角度までサーボが動かない時があるためカクカク動き、サーボ本体が結構アツアツ状態となりました。
トルクが足りず指定角度まで動かない場合があるので、その状態ではサーボのモーターは常に動こうとして高負荷状態となり1A前後の電流が流れた状態となります。
この状態が続くとおそらくサーボのモーターが焼ききれそうです。
https://youtu.be/c_JRM4wd1Rs
そこでサーボの構成を変えようと考えています。
SG90と同型のSG92Rという高トルクタイプのサーボモーターなどを考えています。
3Dプリントパーツを使いビス固定しているアーム形状なのでどうしてもパーツ同士の摩擦が生じるため動き出しにはトルクがあるサーボの方が良さそうということです。

SG90のストール・トルク1.8kg/cm(4.8V)に対しSG92Rでは2.5kg/cm(4.8V)と1.5倍ほど高いため、こちらのサーボを使えばスムーズに動かすことができそうですが・・・どうだろうか?
上記動画のようにSG90サーボモーターでも動かすことは可能ですが、ロボットアームなのでスムーズにヌルヌルと動いてくれた方が気持ちいいですからね!
現状、サーボモーターの構成を変えて再度動かしてみようと考えています。
スムーズに動いてくれればいろいろと面白いことができそうなんですが・・・。
動かしてみた感じではアームの操縦は非常に難しいですね。
自分で主要部分のモデリングをしてCAD上で動かし構造は理解できているつもりでしたが、上手く動かすのはなかなか難しいものとなります。
重機オペレーターさんとかなら上手く操縦出来るのでしょうかね!
回転とアームをリフトする動き、そしてアームを伸ばす3方向の操作となるため電子工作的には2つのジョイスティックを使い操作させ、ハンド部分はジョイスティックの押し込みなどで操作する形が良さそうです。
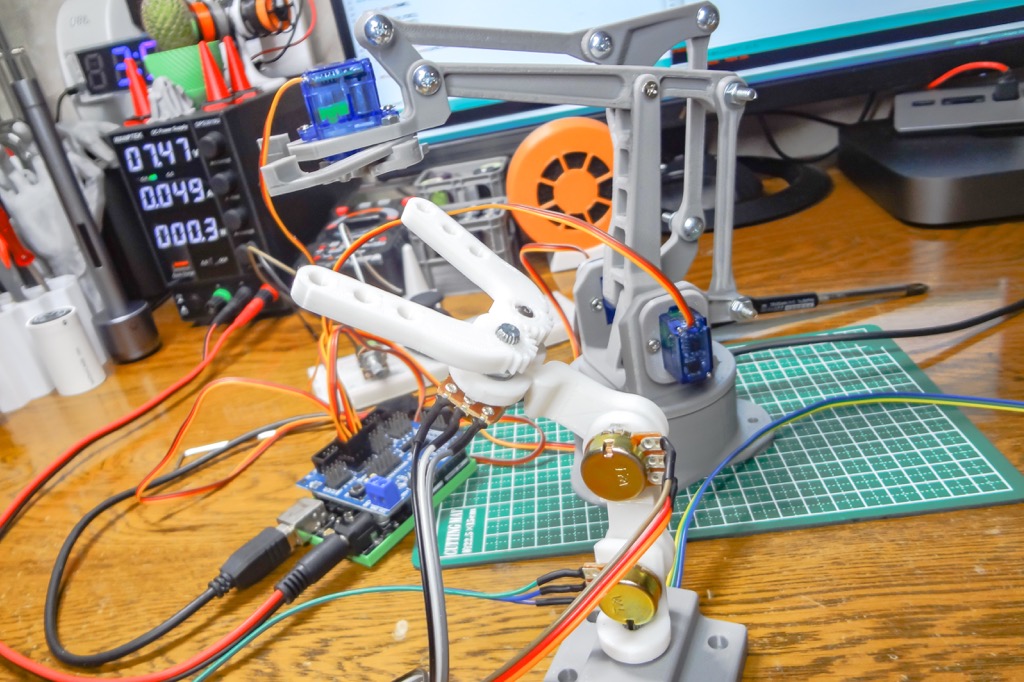
そして、アームの操作が難しかったためこのようなリーダーアームも作ってみました。
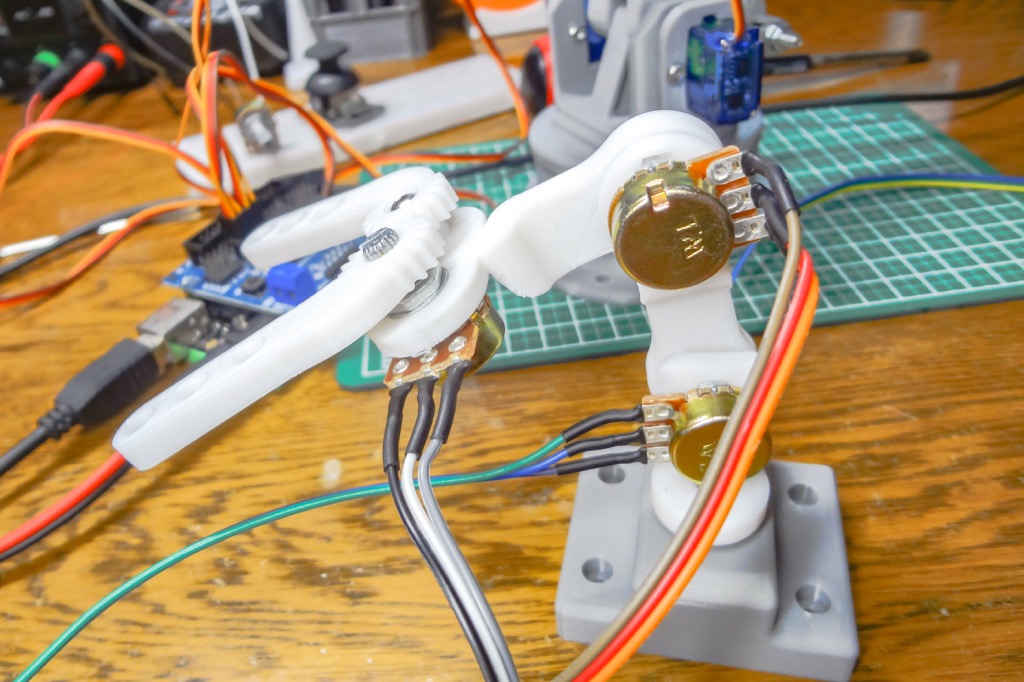
各関節部分にポテンショメータを使いアーム角のアナログ値を取得して同様の動きをメインのアームにさせる予定ですが・・・
https://youtu.be/J_Ps6Fd_x_c
綺麗に連動して動いてくれると気持ちよさそうなんですけどね。
ベースとなるアーム本体が完成すれば、電子工作的にはいろいろと試すことができるいいモデルとなりそうです。
ステッピングモーターを使い正確に関節部分を動かすなど今後やってみたいと考えていますが、このような1つベースとなるモデルを作っておくと今後の製作に活かせそうです。
最後に!
現在製作途中なので今回はこのあたりにとどめておきます。
ベーシックなロボットアームの構造を理解するには非常に良いモデルだと思います。
実際に作ってみて動かしてみると理解も深まりますからね。
アーム本体の製作や構成パーツ、そしてアームを動かすための小アームの製作など次回あらためて詳しくご紹介出来ればと思います。

 【電子工作 / PCB】初めてのRP2040を使った基板設計。テスト回路を組む際に使える最小構成で組んだRP2040ブレークアウトボードの製作!
【電子工作 / PCB】初めてのRP2040を使った基板設計。テスト回路を組む際に使える最小構成で組んだRP2040ブレークアウトボードの製作!  PCBWayの3Dプリントサービスを使い自作基板用の透明カラーケースを作る!透明レジンUTR-8100の染色レビュー!
PCBWayの3Dプリントサービスを使い自作基板用の透明カラーケースを作る!透明レジンUTR-8100の染色レビュー!  【電子工作/Arduino】ATtiny84で動かすミニ無線コントローラー『TinyPad』を作ってみました!
【電子工作/Arduino】ATtiny84で動かすミニ無線コントローラー『TinyPad』を作ってみました!  【電子工作】Arduinoボードへの電源供給方法まとめ!
【電子工作】Arduinoボードへの電源供給方法まとめ!  【自作基板 / JLCPCB】昇降圧DC/DC TPS63000を使ったブレッドボード用小型電源ボードの製作![3.3V / 5Vバックブーストコンバータ]
【自作基板 / JLCPCB】昇降圧DC/DC TPS63000を使ったブレッドボード用小型電源ボードの製作![3.3V / 5Vバックブーストコンバータ]  【Arduino】デバイスが認識されない!ATmega16U2のファームウェアの修復で対処出来る場合があります!【壊れたArduinoの修復 その③】
【Arduino】デバイスが認識されない!ATmega16U2のファームウェアの修復で対処出来る場合があります!【壊れたArduinoの修復 その③】  【電子工作 / PCB】ファミコンのコントローラーを使ったUSBゲームパッド化基板を作っています! まずはPro Micro(Arduino Leonardo)を使ったブレッドボードでのテストから!
【電子工作 / PCB】ファミコンのコントローラーを使ったUSBゲームパッド化基板を作っています! まずはPro Micro(Arduino Leonardo)を使ったブレッドボードでのテストから!  【Arduino Uno】壊れたArduinoを修理する!マイコンチップATmega328Pの交換方法【壊れたArduinoの修復 その②】
【Arduino Uno】壊れたArduinoを修理する!マイコンチップATmega328Pの交換方法【壊れたArduinoの修復 その②】  KAIWEETS KM601デジタルマルチメーターの立て掛けスタンドを作ってみました!【STLデータ公開】
KAIWEETS KM601デジタルマルチメーターの立て掛けスタンドを作ってみました!【STLデータ公開】  【Baseus】オシャレで使いやすいLEDライトのご紹介!3Dプリンタまわりの照明にもオススメです!
【Baseus】オシャレで使いやすいLEDライトのご紹介!3Dプリンタまわりの照明にもオススメです!  【自作キーボード / 電子工作】オープンソースの自作キーボード『waffling60』をBakeneko60ケースとの組み合わせで組んでみました!
【自作キーボード / 電子工作】オープンソースの自作キーボード『waffling60』をBakeneko60ケースとの組み合わせで組んでみました!  3Dプリンタ初心者でも綺麗な造形ができ扱いやすいRepRapper製フィラメント。コスパ&品質の良いフィラメントです!【PLA/PETG】
3Dプリンタ初心者でも綺麗な造形ができ扱いやすいRepRapper製フィラメント。コスパ&品質の良いフィラメントです!【PLA/PETG】  DIYオシロスコープのスタンドを作ってみました!(JYE Tech DSO150)【STLデータ公開】
DIYオシロスコープのスタンドを作ってみました!(JYE Tech DSO150)【STLデータ公開】  【3Dプリンタ】ドライボックスを購入。フィラメント保管用に作られたかのようなサイズ感で綺麗に収納できます!
【3Dプリンタ】ドライボックスを購入。フィラメント保管用に作られたかのようなサイズ感で綺麗に収納できます!  コンパクトな18650リチウムイオン電池用充電器を作ってみました!【STLデータ公開】
コンパクトな18650リチウムイオン電池用充電器を作ってみました!【STLデータ公開】 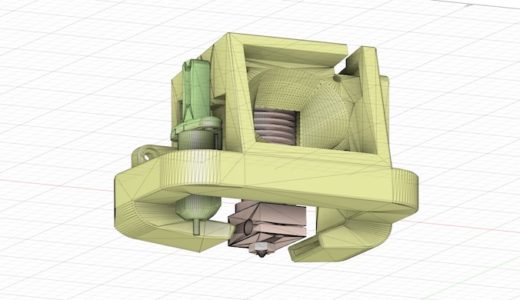 【3Dプリンタ】BLTouchのXY方向プローブオフセット値の調整方法!
【3Dプリンタ】BLTouchのXY方向プローブオフセット値の調整方法! 

コメントを残す