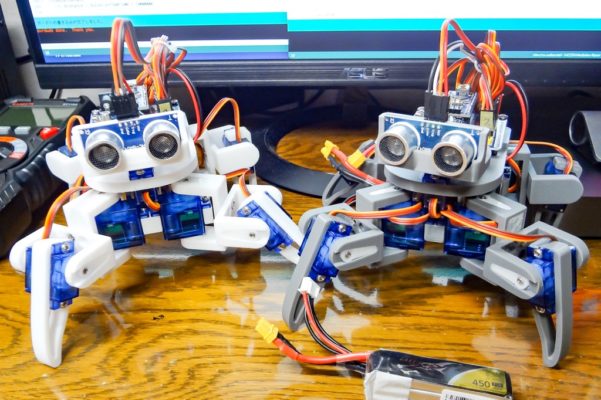
最近、自作ロボくん達の無線化をやっていたのですが・・・
Arduinoを使った4足歩行ロボットですが、まだまだ拡張の余地があるロボくん達でさらに機能を追加し拡張していくと自分の学習用としても面白くなってきました。
元々このような機能の拡張を想定し構成を考えたロボくん達ですが、このように動くものが1つあるとArduino学習用としては最適で面白くなります。
ブレッドボード上でテスト回路を組んでみるだけでなく、実際に動くものを作ってみるとテスト回路&スケッチだけでは気付かなかったいろんな問題点も見えてきたりします。
そんなことから、3Dプリンタで作れるようにモデルデータや基本的な動作のみが入ったスケッチを公開しました。(もうスケッチはだいぶ変わっていますが)
そして今回はBluetooth無線モジュール用のブラケットを作った話となります。

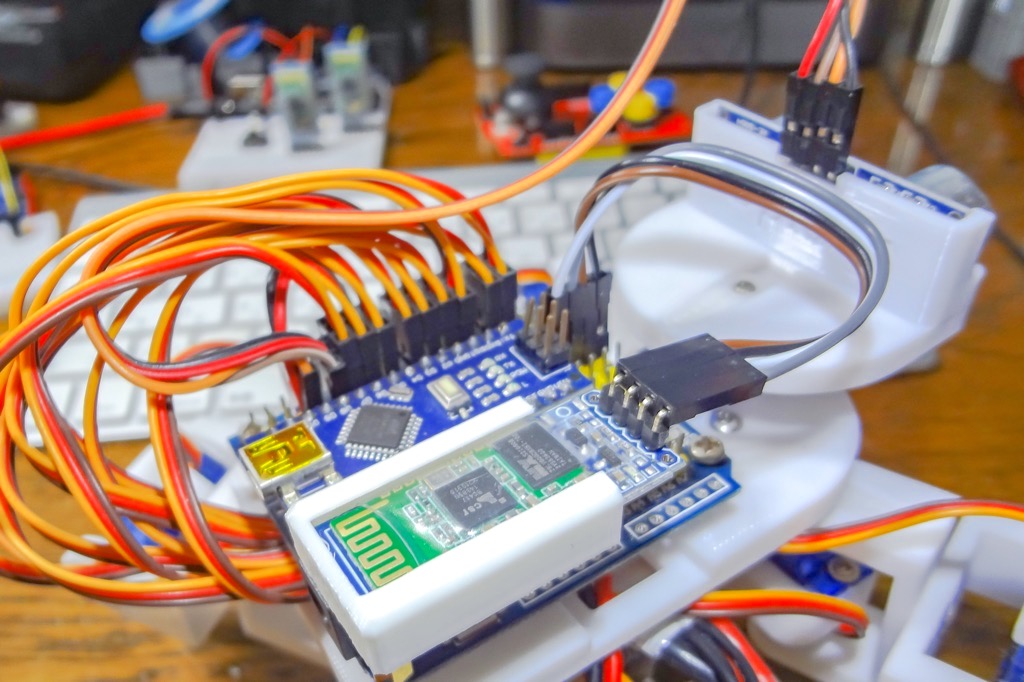
Bluetoothモジュール HC-05/HC-06を固定するブラケットを作ってみました!

ArduinoやRaspberry Piなどのマイコンボードを使った電子工作で無線化するためのモジュールは、BluetoothやWi-Fiを使った方法など技適の問題も絡んできますが、便利に使える無線モジュールは多数あるようです。
以前、nRF24L01という無線モジュールを使った無線化をやってみました。
双方向でのやり取りのほかに複数モジュール間でのデータのやり取りが出来たりと便利な無線モジュールです。
複数ロボ間でのデータのやり取りで動作を連携させて動かしたりしようと考えると、おそらくこの無線モジュールを使えば実現できそうです。


この無線モジュールを製作物に組み込む際に使えるブラケットを作成し以前公開しました。
参考 nRF24L01 Wireless Module BracketThingiverse電子工作で使えるこのような小さなモジュールは、固定のためのビス穴などが用意されていないものが多くなっています。
ブレッドボードでテスト回路を組んで動かす程度では問題になりませんが、製作物に組み込んで動かす場合に激しい動きをさせると固定用のブラケットがないと信号が途切れてしまいます。
このようなモジュールはピンヘッダーにワイヤーを差し込めば使えるわけですが、動きによりワイヤーの脱落とまではいかなくても信号が一瞬途切れてしまうことはよくあるようです。

信号が途切れてしまう原因がプログラム的な問題なのか究明するのに非常に時間がかかりましたが、物理的な接触による信号の途切れが原因だったようです。
無線系のモジュールでは信号が一度途切れると再接続に時間がかかったり、また上手くプログラムを組んであげないと暴走なんてことはよく起こってしまいます。
そして製作物を無線化して動かす方法の1つとしてBluetoothモジュールも試してみたのですが、同様な事が原因で信号が途切れてしまうことが起こるようですね。
テスト回路を組んで動かしていたレベルでは全く問題にならなかったのですが、実際にロボくん達に組み込んでみると通信が途切れる事が多々あり・・・
そんな事で今回はBluetoothモジュールHC-05やHC-06などで使える固定用のブラケットを作ってみました。
技適が取得されていない無線モジュールなので使用には注意が必要ですが、便利なBluetoothモジュールなので電子工作用途で使われている方多いと思います。
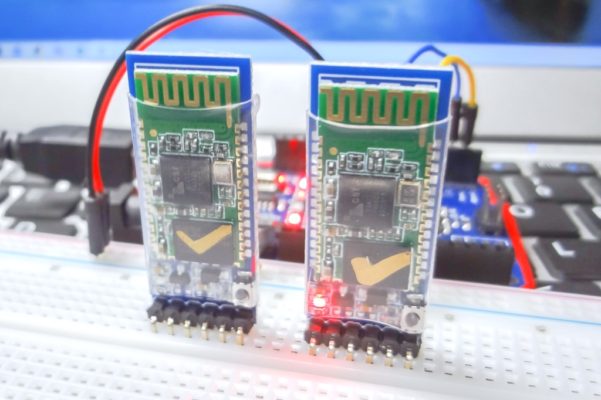

このBluetoothモジュールも小型なため固定のためのビス穴が用意されておらず、製作物に組み込んで使う場合何らかの固定方法が必要となります。
うまく固定して使わないと信号が途切れてしまい、再接続に時間がかかったりと使っていて結構面倒となります。
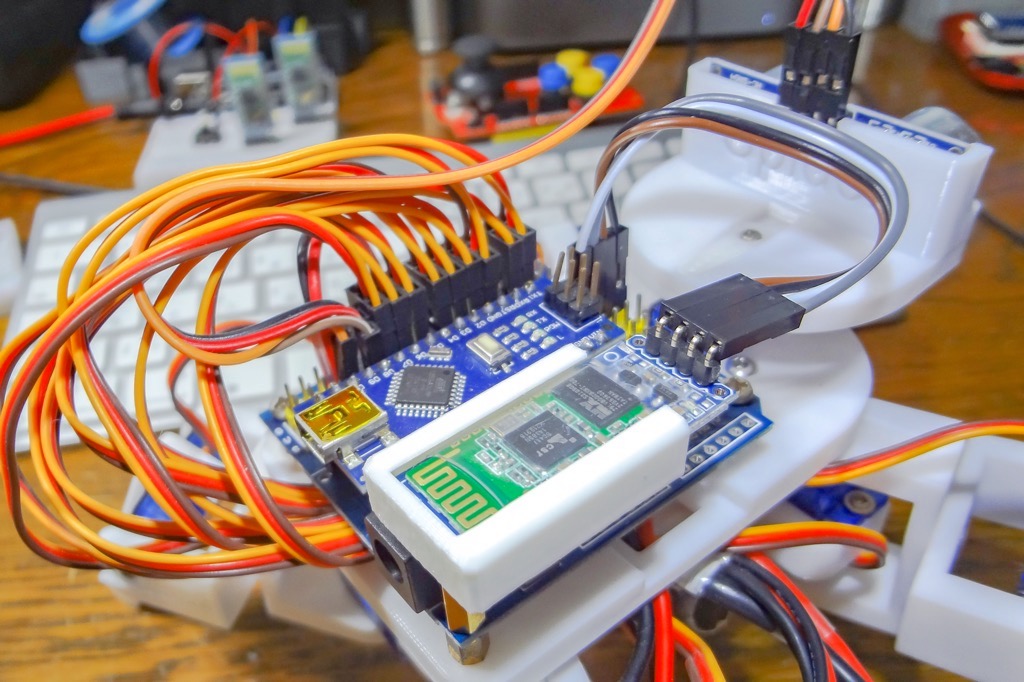
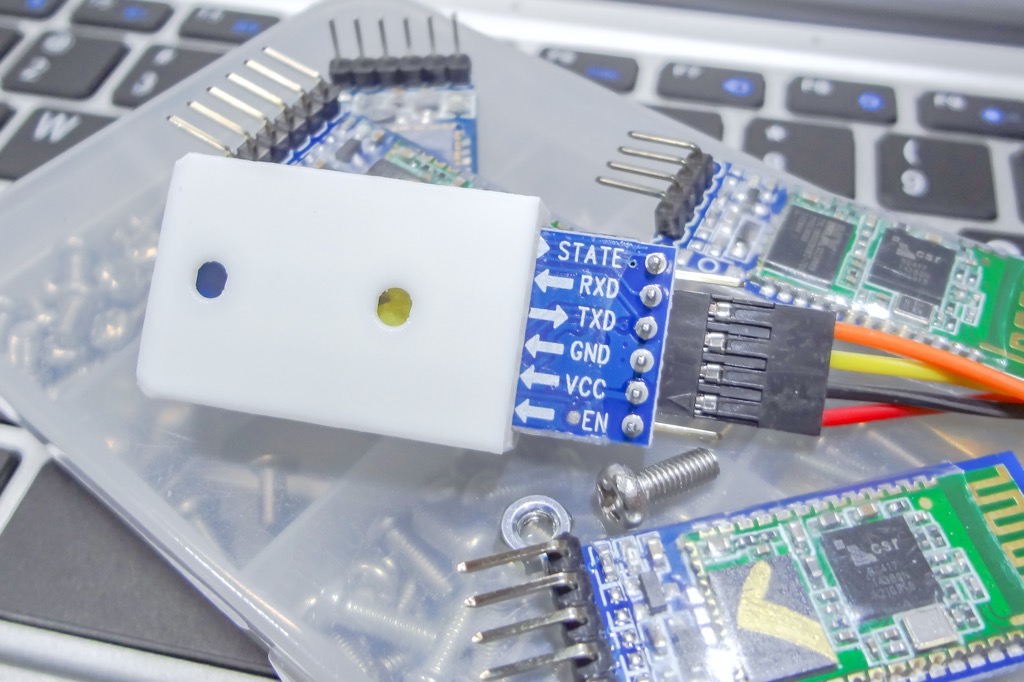
このような固定用のブラケットを作ってみました。
モジュールを固定し製作物に取り付けることが出来るシンプルなブラケットとなります。
HC-05やHC-06などのBluetoothモジュールを固定することが出来ます。
こちらからダウンロードできるので、よろしかったら使ってみて下さい!
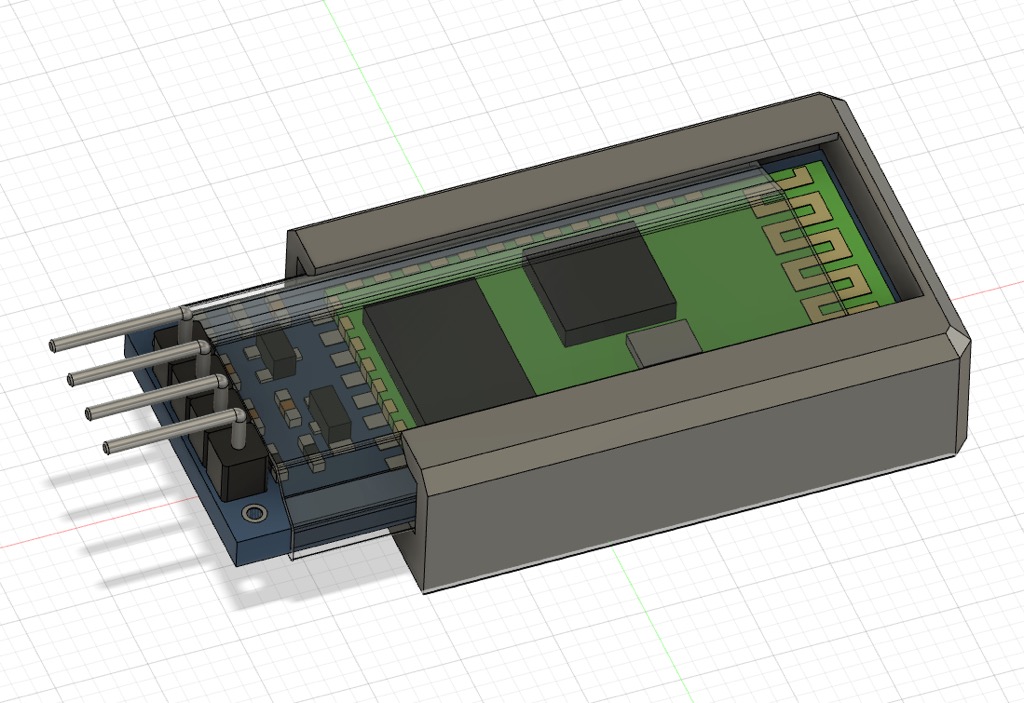
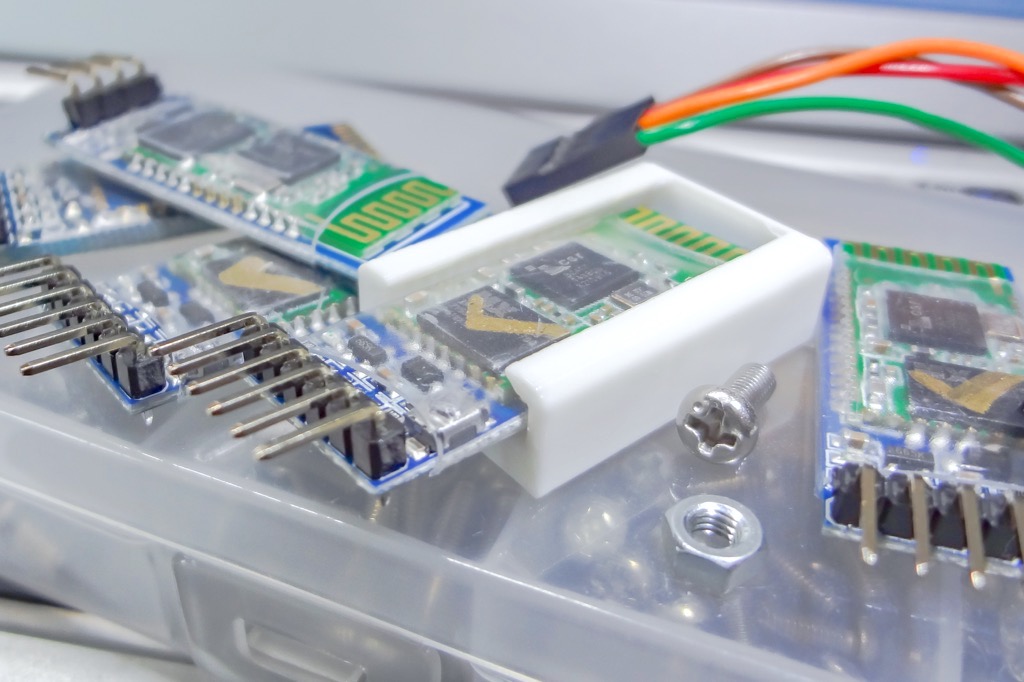
参考 HC-05/HC-06 Bluetooth Module Simple BracketThingiverseHC-05やHC-06 Bluetoothモジュールは各社仕様が微妙に異なるものもあるようですが、モジュール寸法は同じで大抵の場合接触による短絡等を防ぐためのシュリンクチューブが取り付けられています。
このチューブも考慮して寸法を決めています。
上手くチューブによる摩擦が生まれるので使用中に抜けることはまずないと思います。

また基盤裏面のプリントされた端子も確認でき、ATモードに入るためのスイッチも押せるようになっています。
DSDのモジュールではハードケースが付属していてシュリンクチューブは付けられていないようです。
製作物に組み込む際はハードケースではおそらく使いづらいと思います。
このブラケットを使われる際はシュリンクチューブを付けて装着するのがいいと思います。
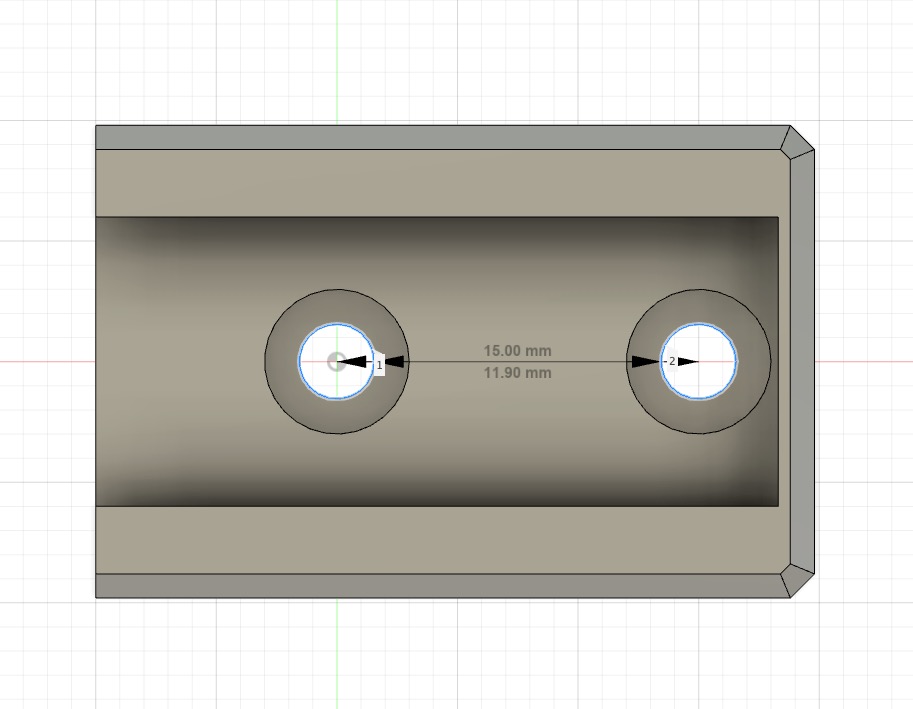
固定用のビス穴は2ヶ所、M3ビス形状としています。
穴同士の間隔は15mmで作っています。
ロボくんへの固定は、Arduinoボード固定用穴にM3スペーサーを取り付けそこにこのブラケットを1点固定させています。
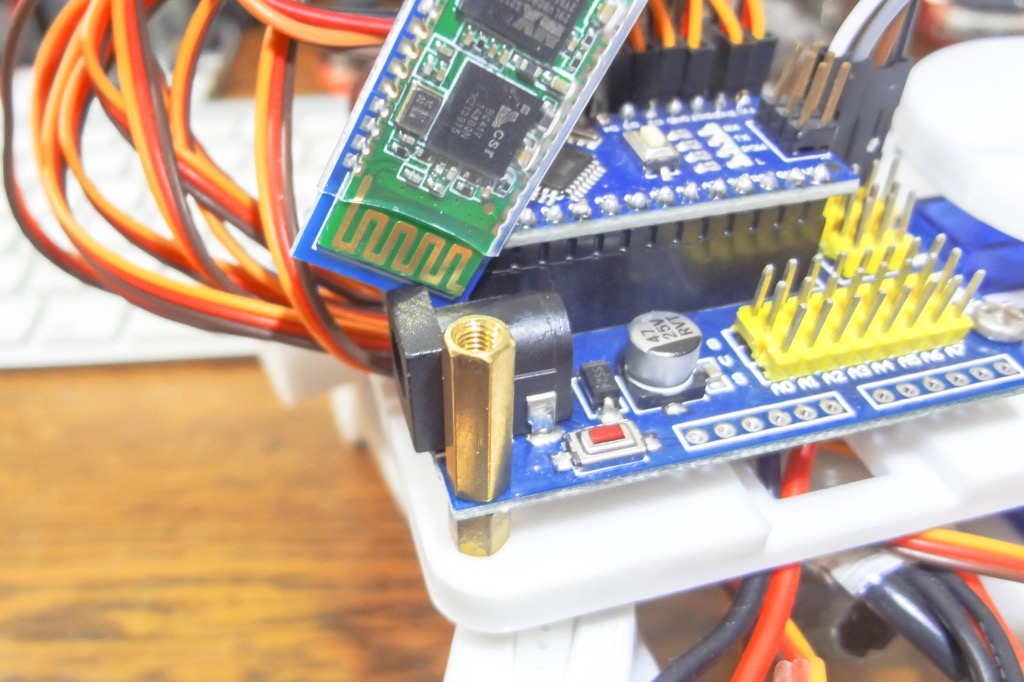
ロボくん達に取り付けて動かしてみましたが、こんな激しい動きをさせても信号が途切れることはなくなりました。
https://youtu.be/dKABCucaJuQ
信号が途切れる原因を特定するのに非常に時間がかかってしまい、このようなブラケットを作成しました。
無線系のモジュールを組み込む際はこのようなブラケットを使ってしっかりと固定するのが望ましいようですね。
ワイヤーをはんだ付けしてしまってもいいのですが、ボーレートを変更したい場合や端末名の変更等でATコマンドによる設定変更を行う場合ではモジュールをサクッと抜いて設定変更・・・こっちの方が何かと使い勝手はいいかと思います。
よかったら使ってみて下さいね!
 【電子工作】3Dプリントパーツ・Arduinoで動かすスマートカー(ロボットカー)製作ノート!
【電子工作】3Dプリントパーツ・Arduinoで動かすスマートカー(ロボットカー)製作ノート!  【JLCPCB】初めてのフレキシブル基板を製作してみました!(フレキシブルArduino)
【JLCPCB】初めてのフレキシブル基板を製作してみました!(フレキシブルArduino)  【電子工作キット】初心者向けオシロスコープDIYキットを組み立てる!(JYE Tech DSO150 15001K)
【電子工作キット】初心者向けオシロスコープDIYキットを組み立てる!(JYE Tech DSO150 15001K)  【電子工作】はじめての基板製作!JLCPCBさんに基板を発注してみました。ユーザー登録・データ納品・基板到着までの一連の流れをご紹介!
【電子工作】はじめての基板製作!JLCPCBさんに基板を発注してみました。ユーザー登録・データ納品・基板到着までの一連の流れをご紹介!  【電子工作】マイコン制御で機能が豊富!はんだステーションKSGER T12を使ってみる!
【電子工作】マイコン制御で機能が豊富!はんだステーションKSGER T12を使ってみる!  【Arduino】ATmega328P単体でスケッチを動かしてみる!その② USB-シリアル変換モジュールを使ってスケッチを書き込む!
【Arduino】ATmega328P単体でスケッチを動かしてみる!その② USB-シリアル変換モジュールを使ってスケッチを書き込む!  【電子工作】TP4056リチウムイオン電池充電モジュールの充電電流を変更する!Type-CモジュールのPD対応は可能か?
【電子工作】TP4056リチウムイオン電池充電モジュールの充電電流を変更する!Type-CモジュールのPD対応は可能か?  【電子工作】無線モジュールnRF24L01を使いArduino間で無線通信をやってみる!
【電子工作】無線モジュールnRF24L01を使いArduino間で無線通信をやってみる! 

コメントを残す