電子工作やラジコンなどのホビー用途でよく使われる小型なサーボモーターにSG90があります。
マイクロサーボと呼ばれるもので、重量がわずか9gほどと小型で安価(数百円)で購入出来ることから電子工作用途ではよく使われるサーボモーターの1つになるかと思います。
私も電子工作という趣味用途でこれまでよく使ってきたサーボモーターです。
小型な割にそこそこパワーもあり安価で入手もしやすいことからよく使っています。
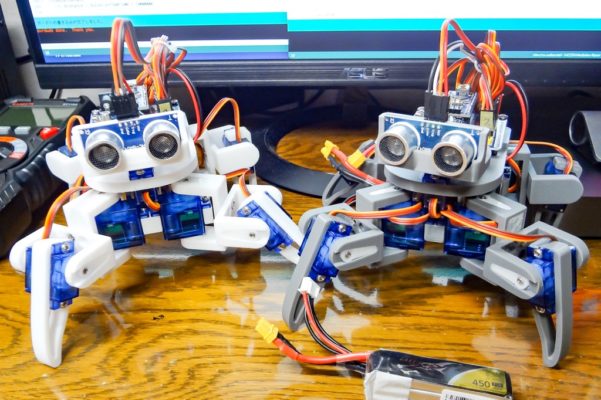
こんな4足歩行ロボットの関節部分にも使いました。
https://youtu.be/fYuISMFKt2A
また、テオ・ヤンセンの機構を使ったこのようなロボを作った時には全回転タイプ(360°)のSG90サーボモーターを使いました。
https://youtu.be/O-xd2DK7Fp0

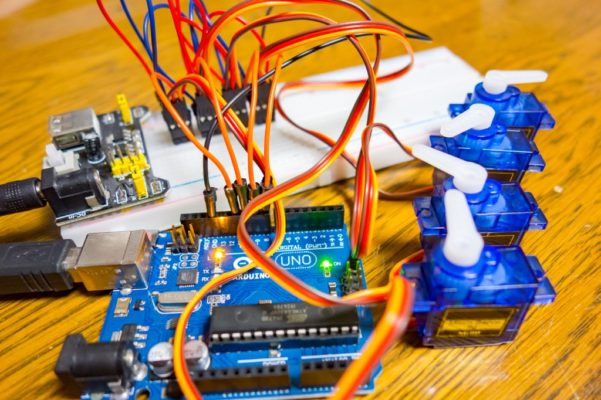
制御も簡単で便利に使えるサーボモーターなので電子工作で動くものを作る時には重宝します。
サーボモーターの制御方法に関してはこちらの記事を参考にして下さい。
そんなSG90サーボモーターなんですが、今回この高トルクタイプとなるSG92Rを使ってみたのでその違いを少し書いてみたいと思います。


目次
マイクロサーボSG90と高トルクタイプSG92Rの違いについて!
現在ロボットアームの製作をしており、このアーム部分を動かすサーボモーターにSG90を使ったのですが・・・
困った事にどうもSG90ではパワーが足りずどうしたものかと考えていました。
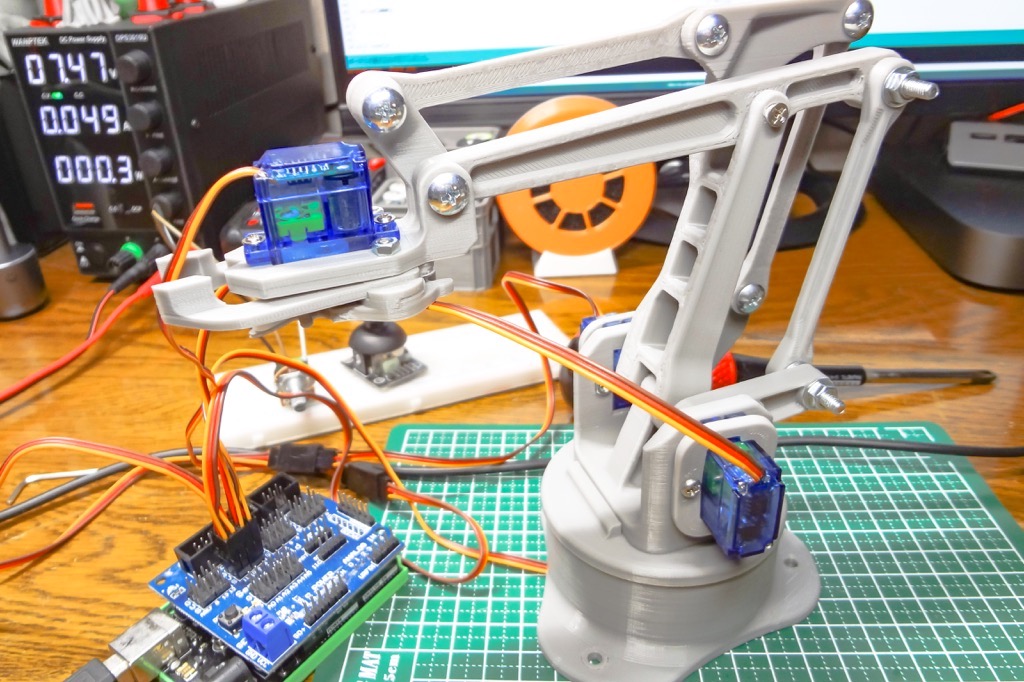
具体的には下動画のように動き出しのトルク不足で指定角度まで上手く動いてくれず、モーターが高負荷状態となりかなりアツアツ状態に・・・
3Dプリントパーツで作ったアームなので関節部分などパーツ同士が接する部分の摩擦がどうしても大きくなってしまうため、初動のトルク不足で少しきっかけを与えてあげないとスムーズな動きが出来ない場合が出てくるようです。
https://youtu.be/rxt1oY5xSgM
そこで調べてみると、SG90の高トルクタイプのSG92Rというサーボモーターの存在を知り試してみることに。
結果は良好でした。
下動画のように非常にスムーズでキビキビとアームが動くようになりました。
さすが高トルクタイプのサーボモーターですね!
https://youtu.be/wumhG-VQFuM
そんな事でSG90とその高トルクタイプのサーボモーターとなるSG92Rの違いを少しまとめてみたいと思います。
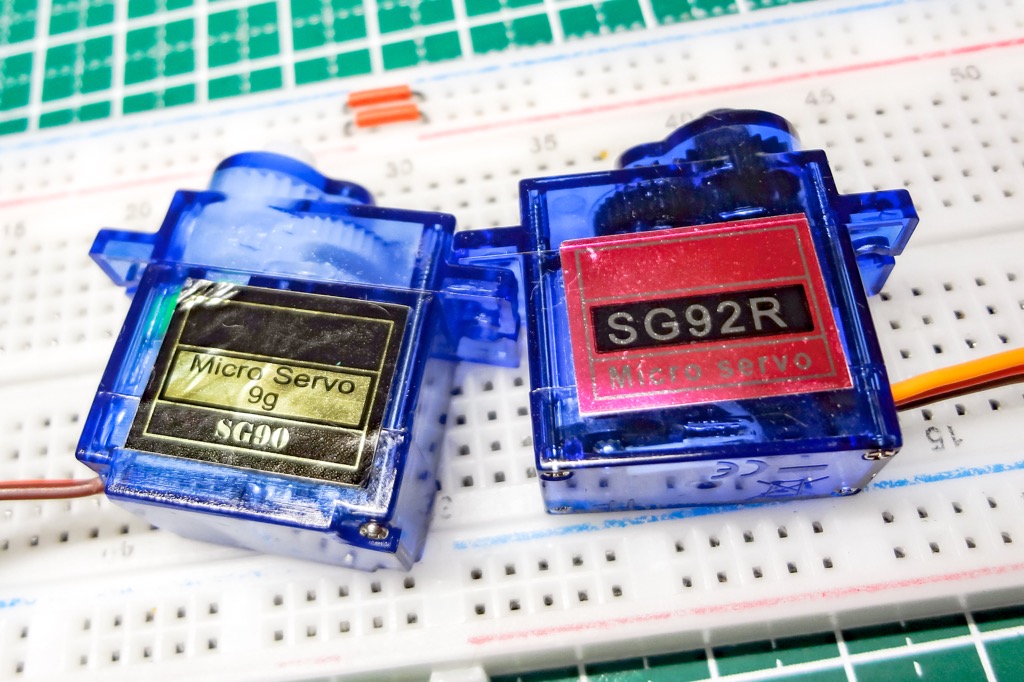
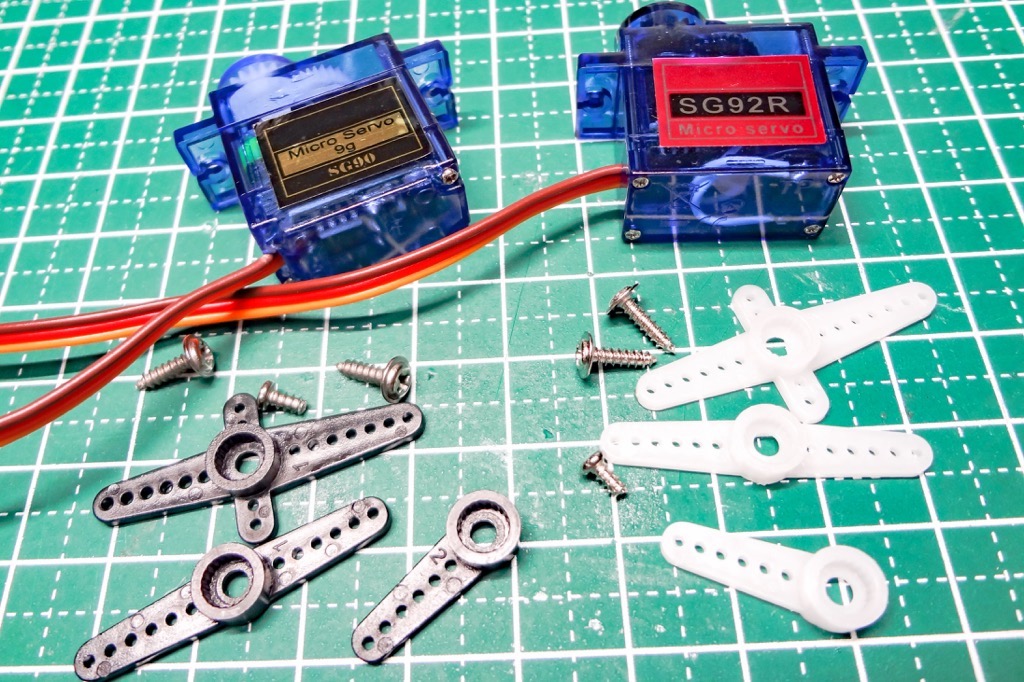
Tower ProブランドのSG90 / SG92Rについて
マイクロサーボSG90やその姉妹製品となるSG92RなどはTower Pro製のものが正規品となります。
SG90やSG92R、またメタルギアタイプのMG90SなどのサーボモーターはTower Proブランド以外にも多数コピー製品が出回っています。
本記事でご紹介している写真の物はコピー製品のものを掲載しています。
Tower Proのものと他のコピー製品とでは配線の取り付け位置や内部で使われているギアの素材など多少の違いがあります。
性能に関しては、上記の4足歩行ロボットを製作した際にTower Pro製のサーボを使って1機、そしてコピー製品を使って1機作ってみましたが大きな違いはあまり感じられませんでした。
※動作音(ギアの音)は少し違うようでした!
そんな事から私の場合、特にこだわってTower Pro製のものを使うことはありませんが、正規品の方がどうしてもいいと思われる方はTower Pro製のものを購入するのがいいかと思います。
スペック比較(SG90 / SG92R)
まず簡単にSG90とSG92R、両サーボモーターのスペックをまとめてみます。
| SG90 | SG92R | |
| PWMサイクル | 20ms | |
| 制御パルス | 0.5ms~2.4ms | |
| 制御角 | ±90°(180°) | |
| 配線 | 茶(GND) / 赤(Vcc) / 橙(制御信号) | |
| ストールトルク | 1.8kg/cm(4.8V) | 2.5kg/cm(4.8V) |
| 動作速度 | 0.1秒/60° | |
| 動作電圧 | 4.8V(~5V) | |
| 外形寸法 | 22.2mm×11.8mm×31mm | 23mm×12.2mm×27m |
| 重量 | 9g | |
まずサイズですが、データシート的には上記のように微妙なサイズの違いがあります。
比べてみると縦横のサイズはほぼ同サイズですが、高さ方向は少しSG92Rの方が小さくなっています。
製作物に組み込む場合はサイズに注意する必要があります。

その他のスペックはほぼ同じですが、違いはストールトルクが違うところです。
SG90のストールトルク1.8kg/cm(4.8V)に対し、SG92Rでは2.5kg/cm(4.8V)とトルクが約1.5倍ほど高くなっています。
動かしてみた感じではかなりパワーは増しています。
手持ちの重量計では500gまでしか測れなかったのでトルクに関してはこちらの動画を参考にして下さい。
https://youtu.be/2KgGEbW_8Bw
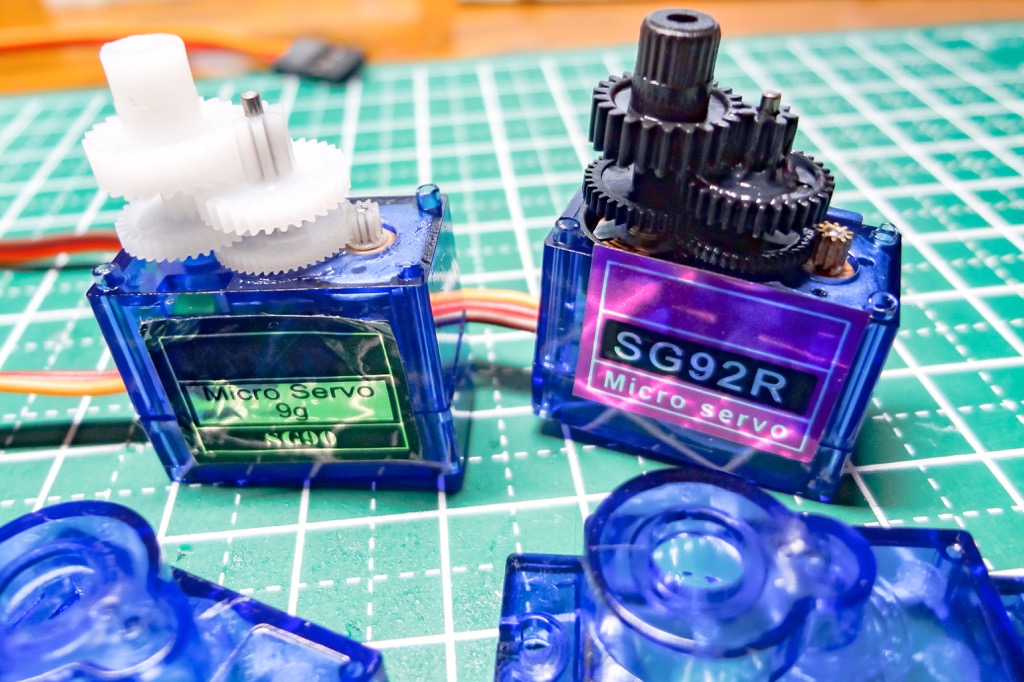
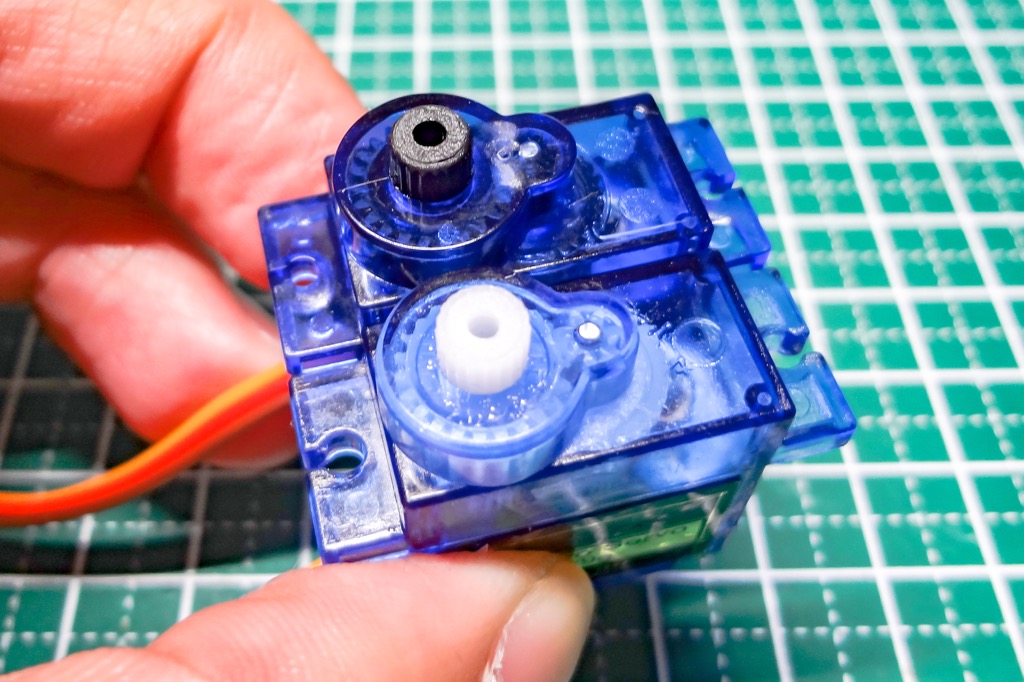
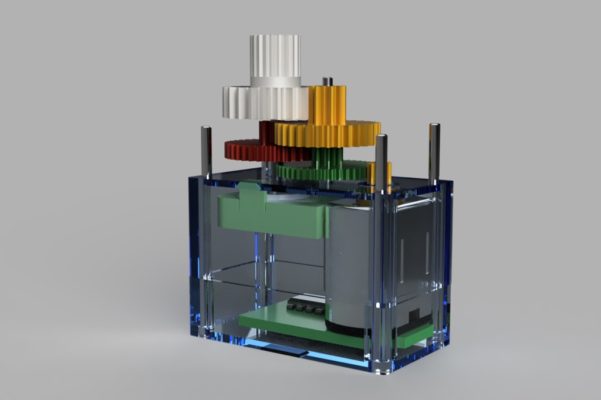
内部ギア構成
内部のギアを確認してみます。
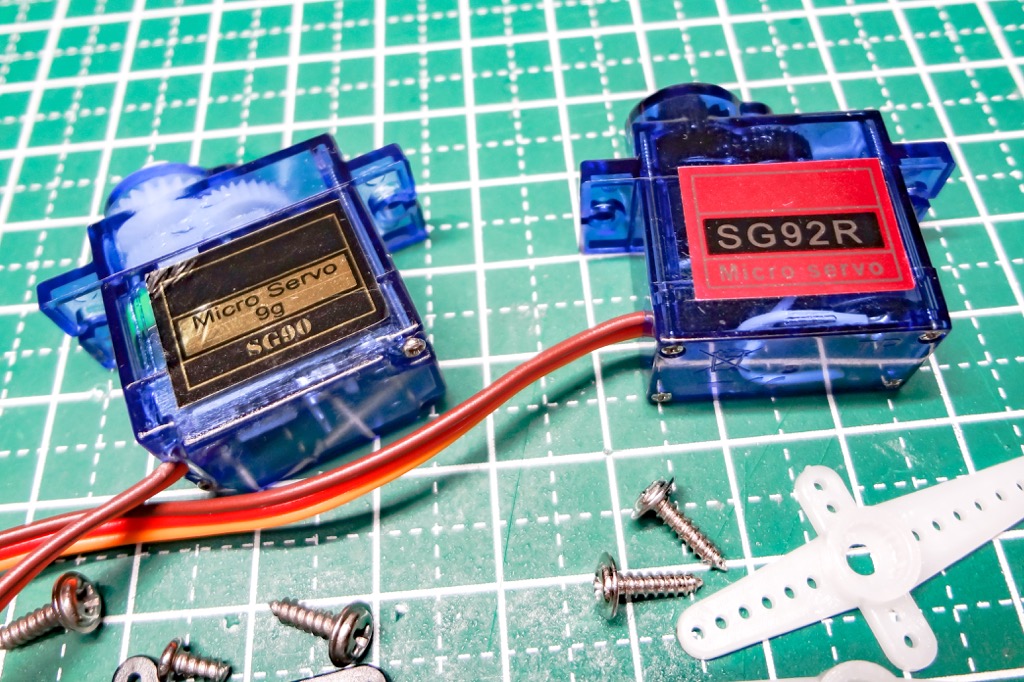
SG90のプラスチック製ギアからSG92Rでは炭素繊維配合POM樹脂というカーボンファイバーを配合した強化ギアになっており耐久性が増しているようです。
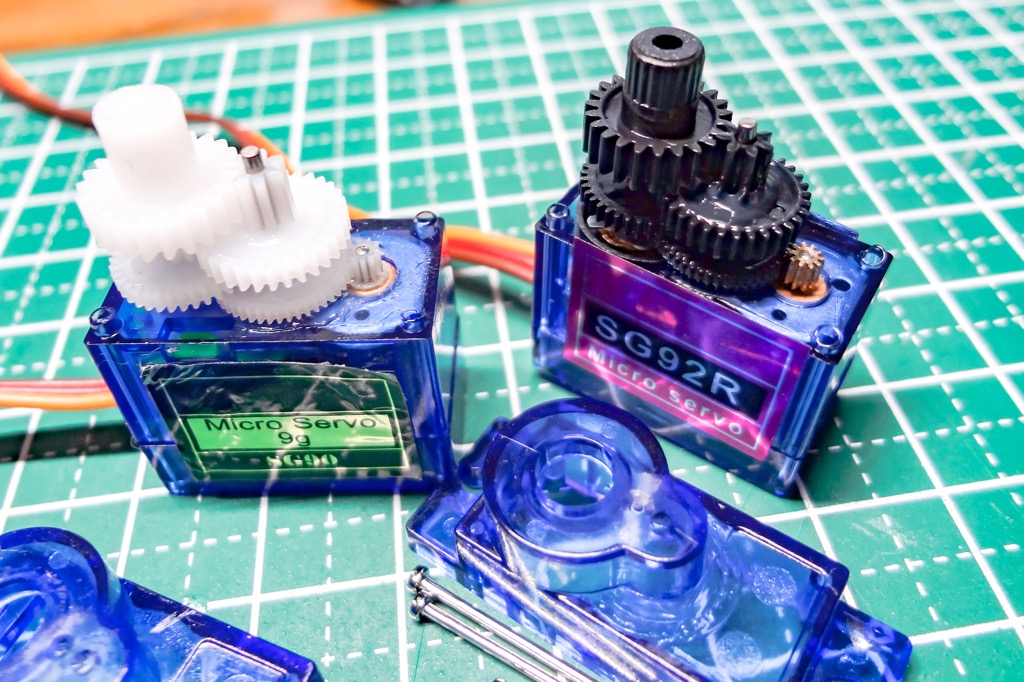
そしてモーターに付いているピニオンギアが金属製となっています。
今回写真左のSG90はコピー製品のためこのピニオンギアはプラスチック製となっていますが、正規Tower Pro製のSG90では同様に金属製のものが使われています。
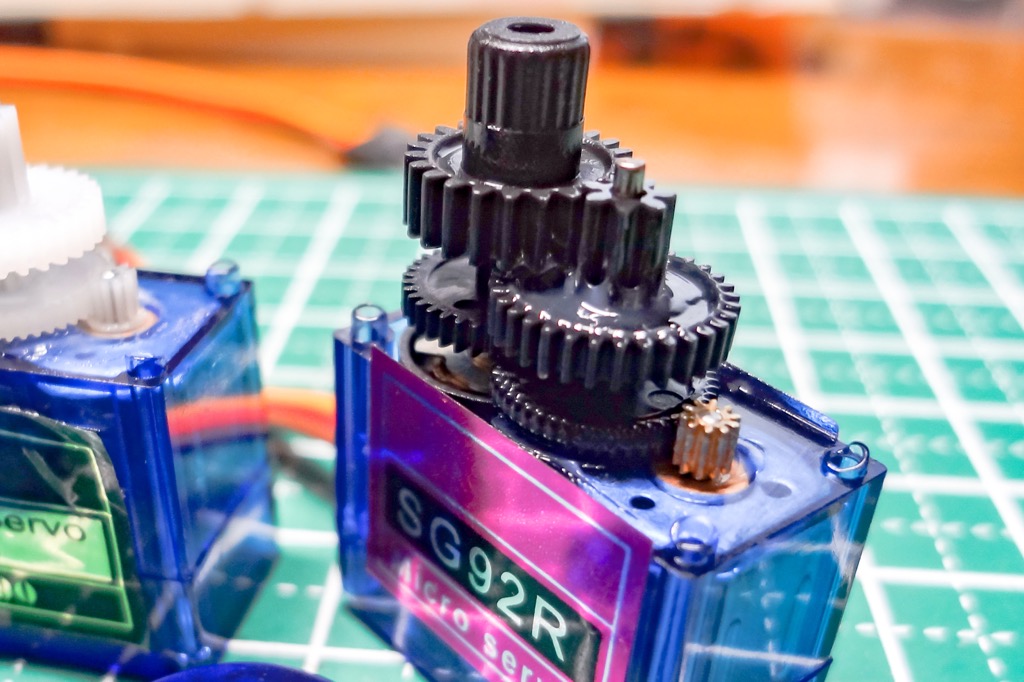
付属しているサーボホーンも黒色のものが使われているのが特徴のようです。(SG90には白色、SG92Rには黒色のものが付属しています)
【追記】SG90などのマイクロサーボをブレッドボードに固定出来るブラケットを作ってみました!
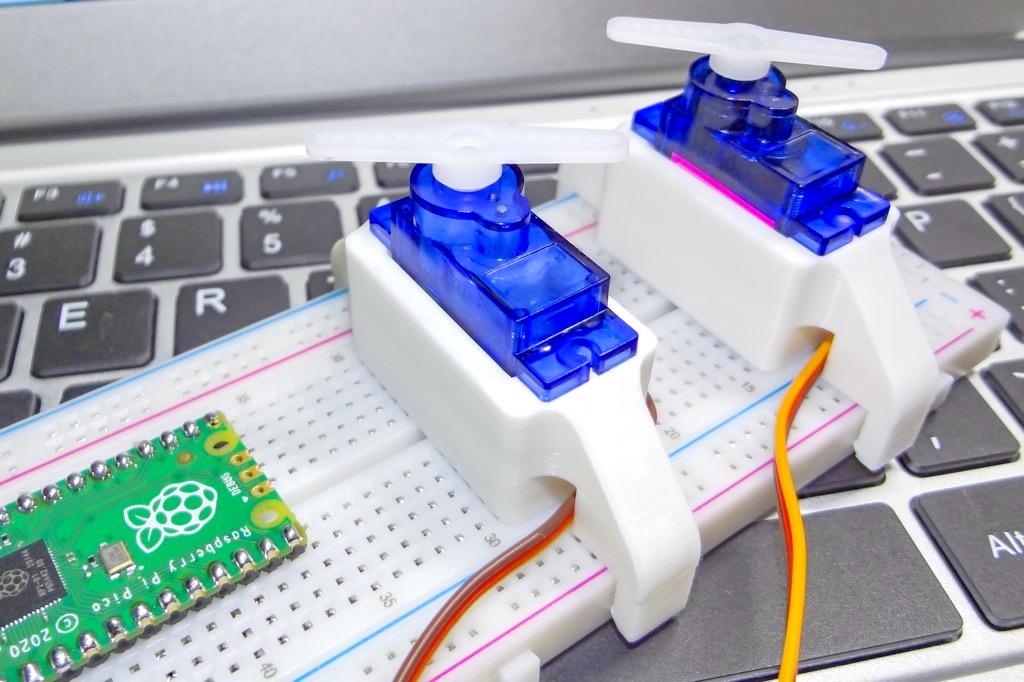
電子工作では定番的なサーボモーターとなるSG90やMG90S、SG92Rなどの小型マイクロサーボをブレッドボードに固定するためのブラケットを作ってみました。
電子工作を始めた当初からこのようなブレッドボードに固定出来るタイプのものがあると便利だなと思っていました。
特にSG90などのマイクロサーボは電子工作用途で使う事が多く、サイズが小さいため何かしらに固定しておかないと動作時に倒れたりしてテストしにくく結構面倒となります。

小型サイズのサーボモーターなので、ブレッドボードに固定しておけば便利に使えるかと思います。
https://youtu.be/gBrkI0PvE-4

最後に!

マイクロサーボSG90やその姉妹製品となる今回ご紹介したSG92R、そして金属ギアが使われているMG90Sなどは正規Tower Pro製のもの以外にコピー製品が多数出回っています。
特に大きな性能の違いを感じたことはあまりありませんが(動作音の違いはあります)、正規品にこだわるならTower Pro製のものを選ばれるのがいいかと思います。
そしてトルクが増したことで現在製作中のロボットアームくんもスムーズ&パワフルに動くようになりました。
やったー!!
SG90とその高トルクタイプとなるSG92Rの比較でした。
価格差にして約100円程度なのでトルクやパワーが必要な場合は間違いなくSG92Rを選択しておいた方が良さそうですね。
また、SG90の内部ギアは全てプラスチック製のギアとなっていますが(ピニオンギア以外)、耐久性なども求めるならメタルタイプのギアを使ったMG90Sなどという選択肢もあります。
今回、実際に製作物に搭載し動かしてみるとその違いが大きく感じられました。
マイクロサーボは電子工作やホビー用途でよく使われるサーボモーターなので参考になればと思います。
 【電子工作 / 3Dプリンタ】ファミコンコントローラーのCADモデル(STL)を公開しました!
【電子工作 / 3Dプリンタ】ファミコンコントローラーのCADモデル(STL)を公開しました!  書籍『はじめてのM5StickC』のご紹介!記事掲載して頂きました。
書籍『はじめてのM5StickC』のご紹介!記事掲載して頂きました。  【電子工作 / PCB】1キーのみのシンプルな自作キーボード『Tappy』をQMKファームウェアに対応させました!
【電子工作 / PCB】1キーのみのシンプルな自作キーボード『Tappy』をQMKファームウェアに対応させました!  【電子工作】これから始めるArduino!何を揃えて何から始めればいいの?
【電子工作】これから始めるArduino!何を揃えて何から始めればいいの?  【電子工作】使用頻度の高い小型モジュールやパーツの収納に便利!タミヤ『ミニパーツケース』が絶妙なサイズ感で使いやすいです!
【電子工作】使用頻度の高い小型モジュールやパーツの収納に便利!タミヤ『ミニパーツケース』が絶妙なサイズ感で使いやすいです!  【Arduino入門編①】ArduinoでLEDを点滅(Lチカ)させてみる!Arduinoの基本となるデジタル出力の解説その①
【Arduino入門編①】ArduinoでLEDを点滅(Lチカ)させてみる!Arduinoの基本となるデジタル出力の解説その①  【電子工作】はんだ作業にあると便利な必須アイテムたち!
【電子工作】はんだ作業にあると便利な必須アイテムたち!  【電子工作 / 自作基板】4ポートUSBハブコントローラーチップSL2.1Aを使ったブレークアウトボードの製作!
【電子工作 / 自作基板】4ポートUSBハブコントローラーチップSL2.1Aを使ったブレークアウトボードの製作! 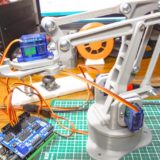

コメントを残す