
ようやく私のもとにもHappymodel Mobula6がやって来てくれました!
長かったぁ〜、昨年12月に頼んだ組ですからね。(もう半分諦めてました)
もう世間ではHDバージョンにあたるMobula6 HDなんてのが出回っているのですが・・・
Meteor65の登場でも安定感があるUS65派だった私なんですが、もうこの機体なら世代交代してもいい感じです。
というか、そもそものポテンシャルが違いすぎる!
飛ばしてみると大人気機体なのも納得です。
このことはEachine UZ65のレビューでも同じ事を書いたような気がしますが、1世代前の機体(US65など)と比べちゃうと、もう戻れないですね!

今回ご紹介するMobula6にはUZ65にはない(UZ65では0802 19000KVのみ)、25000KVモーターのレースエディションと19000KVのレギュラーエディションから選択する事が出来ます。
今回25000KVモーターのレースエディションのMobula6をご紹介します。
気になるのはUZ65との違いだと思います。
後でまとめて書いていますが両機飛ばし比べてみた率直な感想は、誰でも安定して飛ばしやすい(25000KVでは持て余す場面もありますが)Mobula6に対し、ペラサイズが大型化し19000KVモーターでも25000KVモーターに匹敵するスピードが出せ飛行時間が長く飛びは少しクセのあるUZ65といったところでしょうか。(飛行時間はKV値の違いからだと思いますが!)

目次
Happymodel Mobula6 Race Editionレビュー

まずは付属品。
300mAh HVバッテリー×4本に予備ペラ1組(4枚)、予備ネジ、USBバッテリーチャージャー、取説が付属しています。
UZ65と違い専用バッグは付属していません。

機体チェック!
まずは機体外観。
UZ65と同じくRunCam Nano3カメラが使われ、キャノピー横のネジを緩めカメラ角度の調整ができます。
レンズは小さいけど、かなり綺麗なカメラとなります。

そしてUZ65キャノピーと違いキャノピーの固定は3点固定タイプとなっています。
カメラ下にスポンジが挟まれていますが、これを外すとジェロが結構出ます。
このあたり4点固定タイプのUZ65キャノピーの方が優秀です。

ペラはGemfan1219 3ブレード(31mm シャフト径1.0mm)、モーターはSE0802 25000KVとなります。

VTX&受信機内蔵のCrazybee F4 Lite FCが使われ、黒い受信機アンテナと金色のVTXアンテナがキャノピーから出ています。
ピッグテールはPH2.0タイプとなります。

機体底面。
バッテリーホルダーは少し幅に余裕があるようで付属バッテリーでは抜けやすいので、バッテリーにテープを巻くなどの加工をした方がよさそうです。

35mmペラを使ったUZ65と比べると、同じ65mmサイズの機体でもダクト部分はずいぶん小さく感じます。

機体重量は約20gと非常に軽くなっています。
VTX内蔵FCの恩恵ですね。
UZ65の22gと比べ約2gほど軽くなっています。
付属300mAhバッテリーを含めても30g未満に収まります。(約27.5g)

次に内部構成。
受信機&VTXが内蔵されたCrazybee F4 Lite FCが使われており非常にシンプルな構成です。
FCに内蔵されたVTXの出力は25mW固定となっています。(UZ65では200mW出力が可能)
よくぞここまで詰め込んだものですね!
RunCam Nano3カメラへの接続はFCへプラグ接続式となっています。

Betaflight設定
Betaflight設定もサクッとやっちゃいましょう。
ファームウェアのバージョンはBTFL 3.5.7(ターゲット名 CRAZYBEEF4FR)のFrskyバージョンとなります。
ファームアップしてから設定しようかと思いましたが、初めての機体に選ばれる方も多いと思いますのでこのままのバージョンで最低限の設定を進めていきます。
FCのファームウェアアップデートはこちらの記事を参考にして下さい!

Betaflight設定は短時間で行ない(数回に分けたり)、ファンなどで冷却しながら行うのがいいかと思います。
初期状態の設定値を保存
まずは初期状態の設定を保存しておきます。
【CLIコマンドライン】からdump allと入力し初期状態の設定を保存。

ポート設定
ポート設定はこのままで特に問題なさそうです。
UART1が空いているのでFrsky xm+などの外部受信機接続にも対応しています。
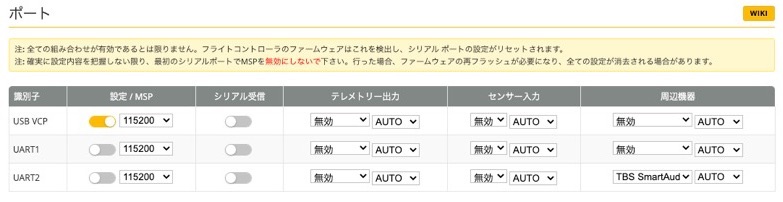
軽量が売りの機体ですので受信機増設はあまり望ましくないのですが、電波ロストが多い機体(受信範囲が狭い)と言われているので一応参考までに!
基本設定
標準で[モーター回転方向を逆転](プロップアウト)に設定されています。
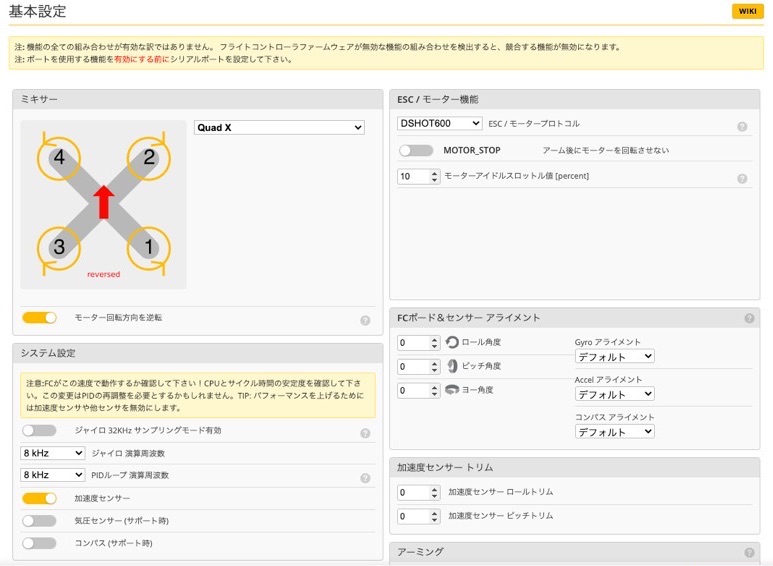
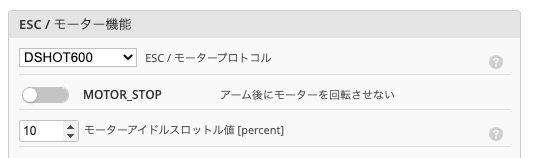
モーターアイドルスロットル値は少し高く設定されています。(10に設定)
このままでも問題ないですが、私は5.5まで下げました。
アーム最大角も180°に設定されているので問題ないですね。

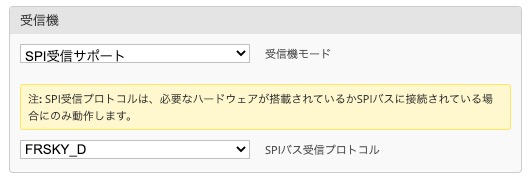
[受信機]設定は、デフォルトのFRSKY_Dのまま進めていきます。
[エアモードを常時使用]がONに設定されています。
アクロモードの時のみ適応したいので、今回こちらはOFFに変更。
後の【モード設定】の項目で追加しました。

[Dshotビーコン設定][ビープ音 設定]はデフォルトで全てオン設定になっていますが特に問題ないですね。

電源・バッテリー
こちらは飛ばしてみた感じ特に変更の必要はなさそうです。
バッテリー電圧が3.0V付近まで下がると一気に電圧低下が起こるようなので、屋外で飛ばすのがメインの方は警告電圧を少し上げてもいいかもしれません。

また、私はまだ遭遇していませんがバッテリー電圧が3.0Vを切るとFC内EEPROMが初期化され設定値が飛んでしまうことがあるようなので注意が必要です!
先にも述べましたが内蔵受信機の電波ロストが起こりやすいのと、電圧が3.0Vを切ると設定値が飛んでしまうことがあるのがMobula6の弱点でしょうかね!(近距離でも数回RX LOSS警告が出ました!)
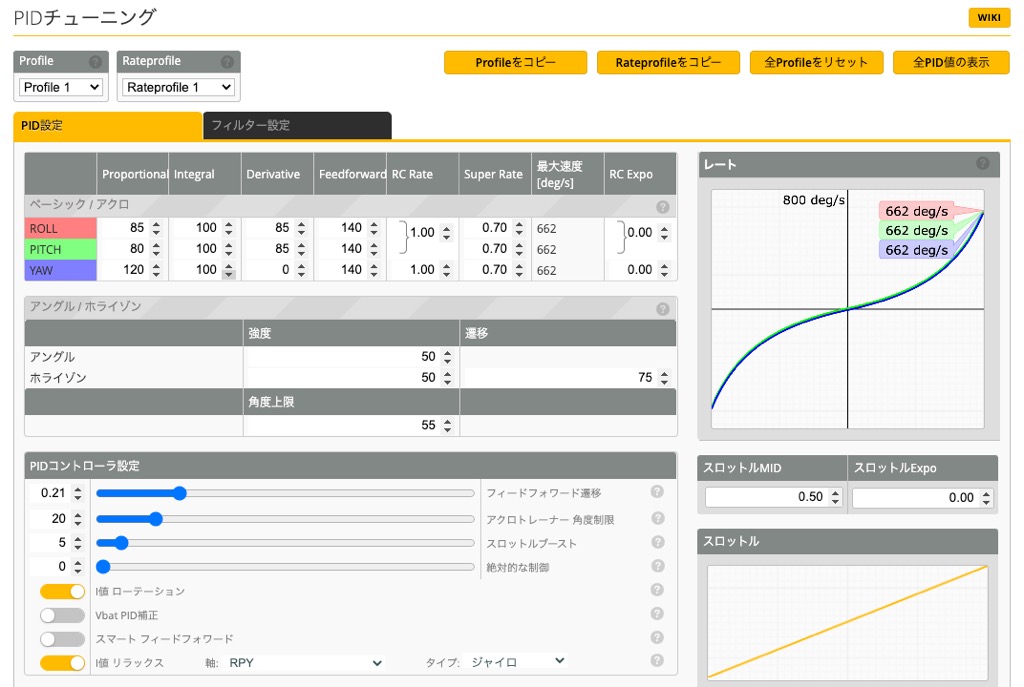
PIDチューニング
オリジナルのPID設定は1つのみ。
結構高い値に設定されています。
レートはBetaflightデフォルトのみとなっています。
機体とのバインド
ここまで設定ができたら機体と送信機のバインド作業に移ります。
バッテリーを接続後(USB接続でも可能)、モータープラグ横にあるBINDボタンを押しバインドモードに入ります。(LEDが点灯します)
あとは送信機もバインドモードに入り機体とバインド。(バインドが完了するとLEDが点滅します。)

送信機とのバインドが完了したら一旦電源をオフ後、もう一度Betaflightに接続し他の設定をしていきます。
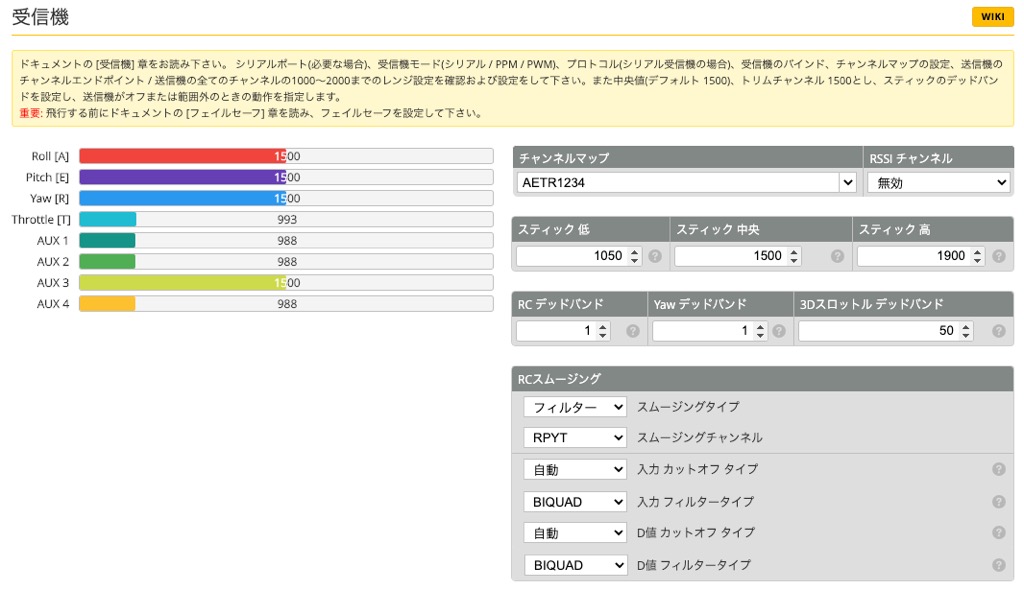
受信機設定
送信機とのバインド作業が完了したら次に【受信機】タブへと移ります。
チャンネルマップをAETR1234に設定。(ここではFC内蔵受信機がFrskyで説明しています。)
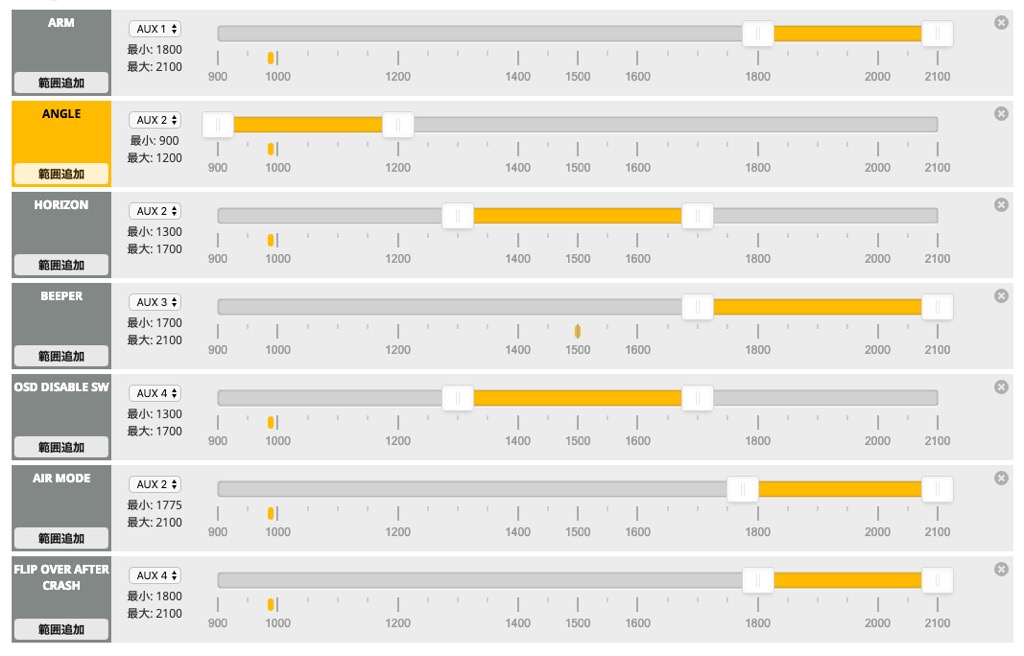
モード
初期状態ではARM・ANGLE・FLIP OVER AFTER CRASHと最低限の設定がされています。

いろいろと追加しましたが、これが初めての機体だという方はBEEPER(ブザー)の追加ぐらいでいいかと思います。
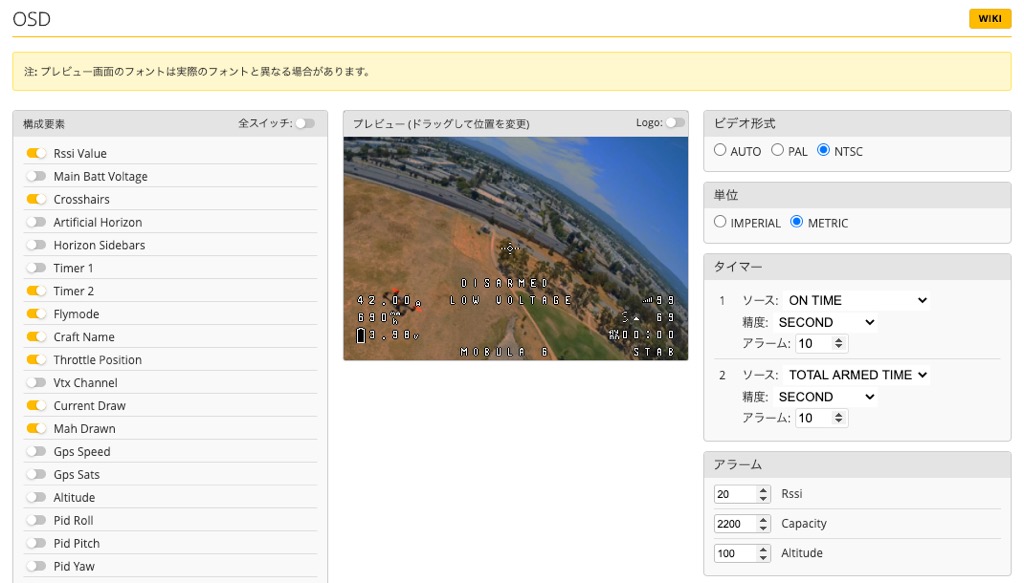
OSD
デフォルトではこんな感じで設定されています。
このままでも問題なさそうですが、お好みで変更して下さい!
VTXのBand&Channelの設定
VTXの周波数(BandとChannel)も設定しておきましょう。
Crazybee F4 LiteはFC内にVTXが内蔵されており、物理的なスイッチが付いていません。
したがって【CLIコマンドライン】から設定していきます。
set vtx_channel=1
set vtx_freq=5705
save
設定データの保存
以上でBetaflightでの設定は完了です!
これまでの設定内容を【CLIコマンドライン】からdiff all(差分バックアップ)で保存して完了となります!
BLHeliでESCの設定確認
BLHeliからESCの設定を確認してみます。
ESCはターゲット名O-H-5、バージョン16.7となっています。
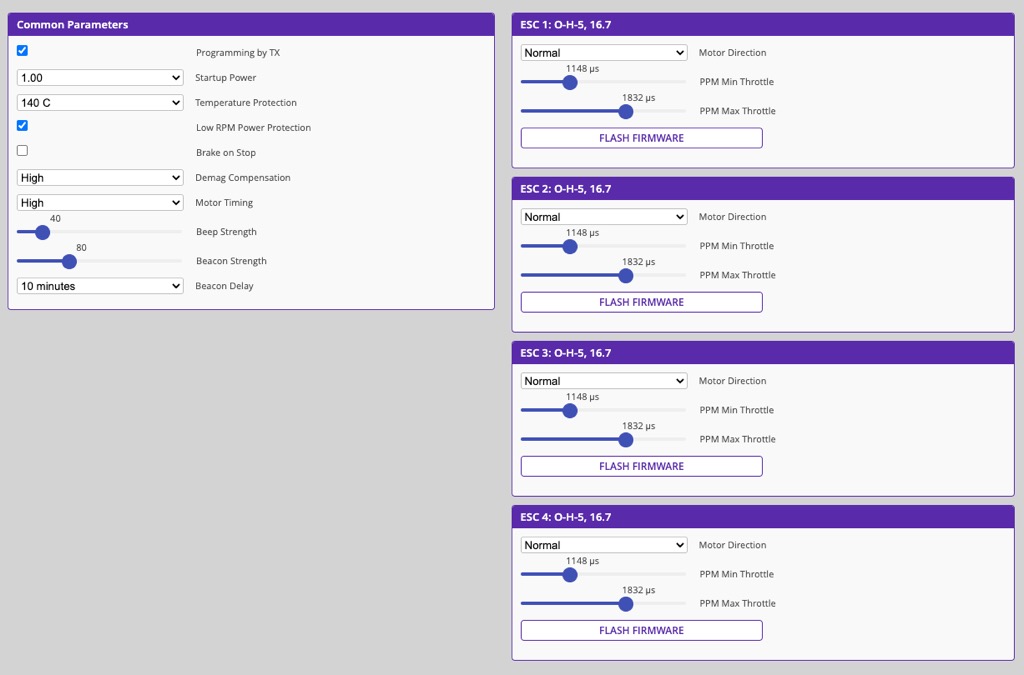
特に変更する箇所はないようですが、モーターブザーの音量(Beep Strength)を少し上げないと音が小さすぎるかと思います。
機体にブザーを取り付けることは簡単ですが、とりあえず今回はこの軽い機体の飛びを確かめたかったのでブザーの取り付けはやらないことに!
以上で最低限の機体設定は完了です!
Eachine UZ65との違いは?

FCのファームウェアのバージョンが少し古いので(国内ショップで買われた場合はアップデートされているのかな?)後々アップデートしたいところですが、UZ65では標準で4.1.1が採用されRPMフィルターの設定なども標準で設定されているので、このあたりUZ65の方が初心者にはいいのかな。
UZ65との比較なんですが、両機とも完全にデフォルト設定での比較になります。
今回レビューしているMobula6が25000KVモーターのレースエディションなので単純な比較にはならないかと思いますが、誰でも安定して飛ばしやすいMobula6に対し少しクセのあるUZ65といった感じでしょうか。

UZ65の方は19000KVモーターですがペラサイズが35mmと大きいためか25000KVのMobula6と比べてもスピード的には違いはほぼ感じられず。
しかしスロットルを入れたときの浮き上がりはMobula6は非常に早くダイレクトに反応してくれます。
軽いので浮き上がりすぎる場面が多々あります。(19000KVモーターではどうだろう?)
屋外では全く気になりませんが、室内で飛ばすには25000KVモーターではパワーがありすぎるため少しスロットルを絞ってあげると非常に飛ばしやすくなります。

一方UZ65では室内でもスロットルの制御はしやすいのですが、モーターパワーが落ちると(電圧低下時)コーナーを曲がる時など機体の落ち込みが発生しやすくなるようです。
また大きなロールの引き起こし時などMobula6と比べるとヨーウォッシュが発生しやすい感じです。
このあたり飛びに関しては少しクセがあるようで、スロットルワークが必要となりそうです。
今回、25000KVモーターのMobula6ですが室内でも操作しやすく3分半は飛んでくれるのでこれは満足です。
最後に!
なるほど、なるほど!
実際に飛ばしてみるとMobula6の人気の理由が分かりました。
ほんと安定して飛ばしやすい。
うちのUS65もようやく世代交代出来そうです。(まだまだ飛ばしますけどね!)

手元に19000KVモーターもあるので、レギュラーエディションの飛びも試してみたいと思います。
そうなってくると今度は25000KVモーターを使ったUZ65も気になるところですが・・・
同時期にこの2機が届いたのでまだまだ飛ばし込めてないのですが、あらためて比較等してみたいと思います。
既にHDバージョンのMobula6 HDが登場しましたが、軽量を生かしたこのノーマルMobula6のポテンシャルの高さはWhoop練習機としてはオススメです!


あら!!
Tinyhawkくんお逝かれに・・・!
見えてるのに回収できないっていうのが何とも歯がゆいですね。
最近、Mobula6とUZ65で遊んでいますが梅雨のこの時期何かと活躍してくれる2機です。
Tinyhawk Freestyleもいい機体なので、迷うところですよね。
コレも良さそうですねー^_^
この前購入したTinyHawk freestyle 2がたった5フライトしかしてないのに屋根の上のソーラーパネルの中に嵌まり込み、回収不能。さらにその直後に土砂降りの雨に晒されて死亡…(>人<;)
もう一度買い直すか、Mobula6 を買うか迷います!