
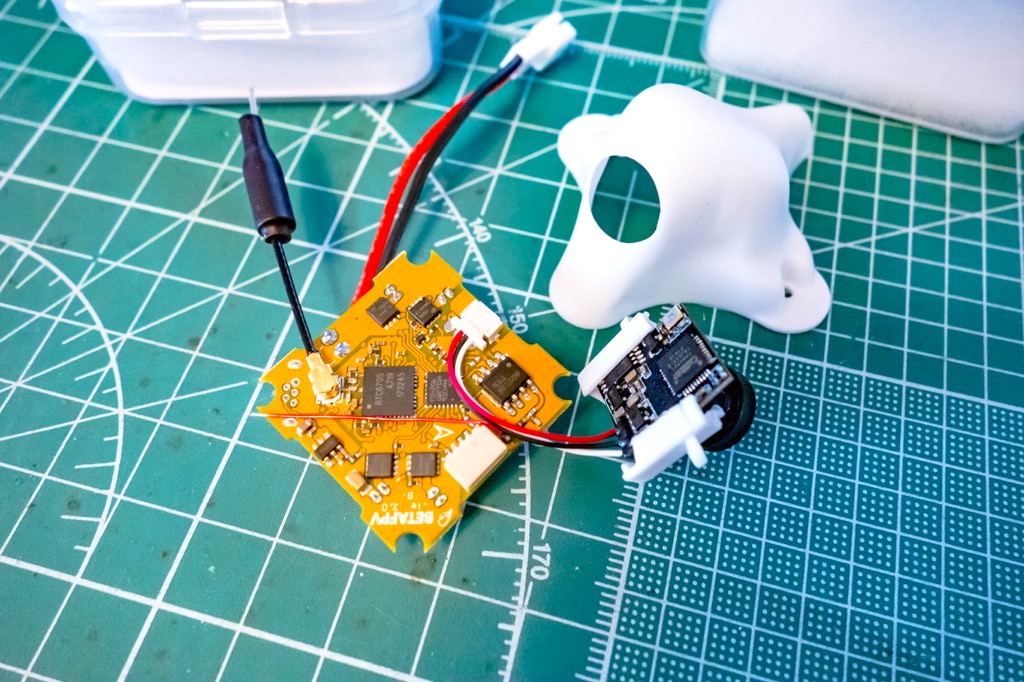
BETAFPVの格安716ブラシ機Beta65S Liteが気になり、Lite FC V2を入手し手持ちストックパーツで組んでみました。
Lite FC V2ではカメラとの接続にJST 0.8プラグが採用されており、C01 Proカメラがプラグ接続で使用でき相性がいいことから完成機ではなくパーツから組みました。

【追記】
JST 0.8コネクタを備えたC01 FPV Micro Cameraが新たにリリースされたようです。
Beta65S Liteでは標準でこちらのカメラが使われています。
- C01 FPV Micro Camera:1/4インチCMOSセンサー(800TVL)
- C01 Pro FPV Micro Camera:1/3インチCMOSセンサー(1200TVL)
V1 FCでほぼ同じ構成で組んだ機体よりパワーがあり驚き・・・
ESCが6Aにアップされているからでしょうか?
以前、BETAFPVの人気機体をご紹介したのですが、このBeta65S Liteは非常に人気があるようです。

FCにはBetaflightではなくSilverwareファームウェアが使われており、OSD画面(メニュー)からSmart Audioを介してPIDやRates、VTXの周波数の変更などを行うことができ便利なFCとなっています。
しかしながら少しクセ?もあるようです。(バグかな?)
VTXの周波数が表示されているものと実際に出力されている周波数がずれている不具合?がありました。
これに関しては、SNSでも同様の現象が発生したという話も伺いました。
これはファームウェアのアップデートで改善するのか?
後日あらためて試してみたいと考えていますが、あとは特に問題なくいろいろ試せるおもしろいFCだと思います。
はじめての機体でBeta65S Liteを選択される方も多いと思いますので、使われているLite FC V2の使い方(設定方法など)をご紹介したいと思います。
また私ははじめて使ったのですが、Raceモードというフライトモードも搭載されています。(Betaflightにありましたっけ?)
通常のAngle/Horizon/Acroモードに加えRacemode AngleやRacemode Horizonで飛ばすことも出来ます。
簡単にいうと、ピッチ軸ではアクロモードとして動作してロール軸はAngleやHorizonの動作をするというものです。
Whoopレーサーの方はこういうの使いこなしてるのでしょうか?
それではLite FC V2の設定方法を簡単に見ていきましょう。
目次
【Beta65S Lite】LIte FC V2の設定方法まとめ!
まずは簡単にLite FC V2の特徴をご紹介。

- 25mW VTXを搭載
- OSDメニューを介してPIDやレート・VTX周波数等の設定&変更が可能
- Bayangプロトコル内蔵レシーバーと外部レシーバーのサポート
- 多くの飛行モードをサポート(Level/Horizon/Acro/Racemode_Angle/Racemode_Horizon)
プロトコルの設定&バインド方法
まずはバインド方法です。
受信機のプロトコルはBayangとなっています。
マルチプロトコル搭載送信機やトイドローン付属(Eachine E011など)の送信機でバインドすることが出来ます。
初期状態ではBayangプロトコルに設定されているので特に問題ないと思いますが、SBUS(外部受信機)での接続も可能となっています。
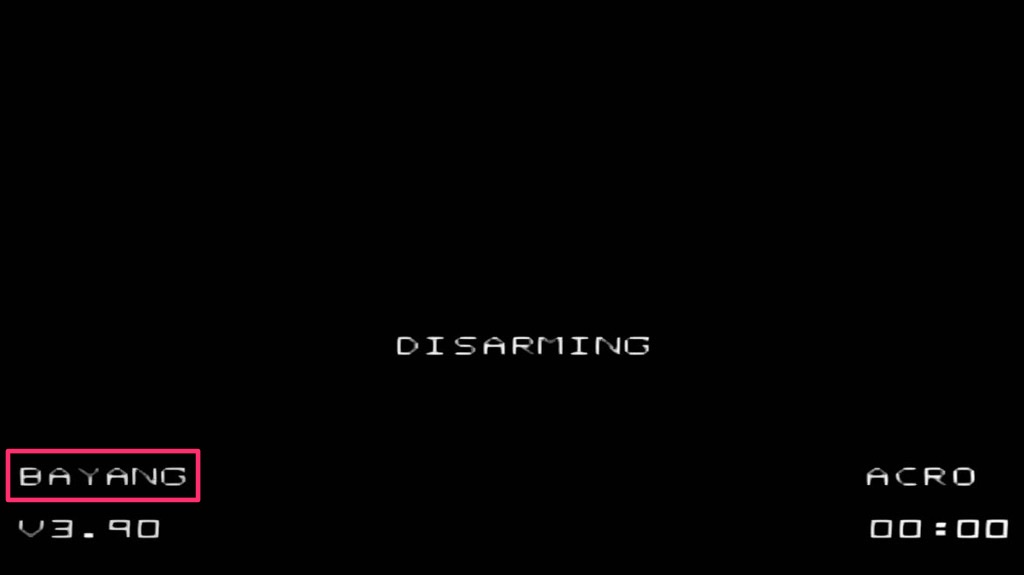
まずはバッテリーを接続してOSD画面を確認。
[BAYANG]と表示されていれば問題有りませんが、SBUSと表示されている場合はプロトコルの変更を行う必要があります。
BayangプロトコルとSUBS(外部受信機接続)の切り替え方法はこのように行います。
Bayangプロトコルの設定
[FC KEY]を押した状態でバッテリーを接続します。
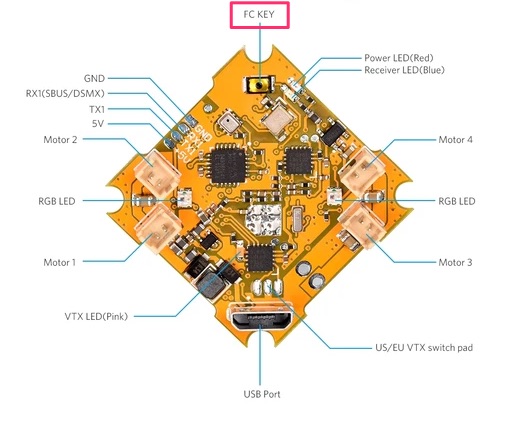
そのまま[FC KEY]を押した状態を4秒キープした後に[FC KEY]を離します。
これで通信プロトコルがBayangに設定され、OSD画面に【Bayang】と表示されます。
SBUS設定
Frsky xm+やFutabaレシーバーを含む外部受信機を接続するためのSBUSプロトコルもサポートされています。
一応こちらも設定する方法もご紹介しておきます。
[FC KEY]を押した状態でバッテリーを接続。
LEDが点灯すると一旦[FC KEY]を離し、4秒以内にもう一度押せばSBUSモードとなります。
OSD画面に【SBUS】と表示されます。
バインド方法
上記方法で受信機の通信プロトコルがBayangであることを確認し、あとはバッテリーを接続すると受信機が自動的にバインディングモードに入ります。
この時、Receiver LED(青色LED)が点灯します。
あとは送信機側もBayangで通常通りバインドモードにすれば接続されます。
バインドが成功すると、Receiver LEDが消灯します。
バインドが完了したら、OSDメニュー画面から各種設定をしていきます。
OSD画面に入る方法はBetaflightと同じです。

トイ送信機ではこのような動作でOSDメニュー画面に入ることが出来ます

OSDメニュー画面から各種設定をやっていく!
OSDメニュー画面に入るとこのようなトップ画面が表示されます。
操作方法はBetaflightと同じなので問題ないかと思います。
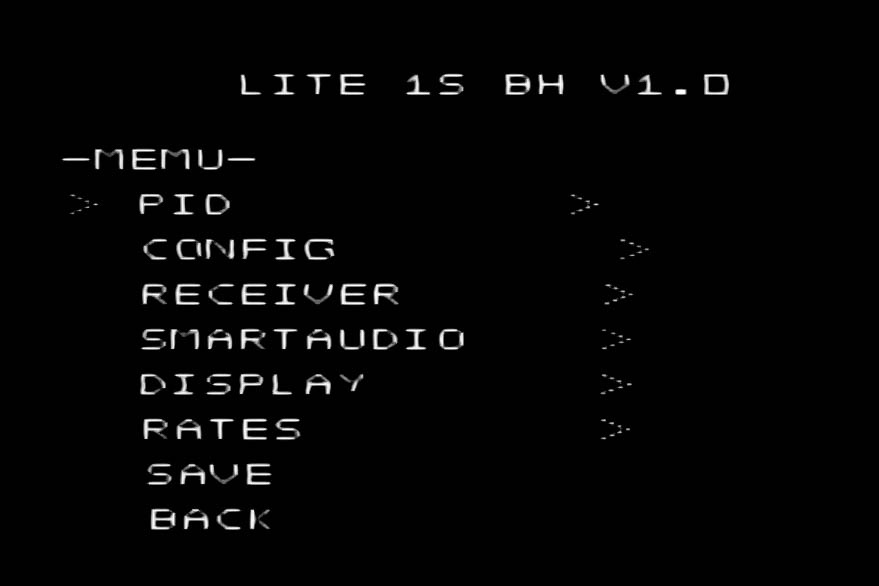
各項目を順番に見ていきましょう。
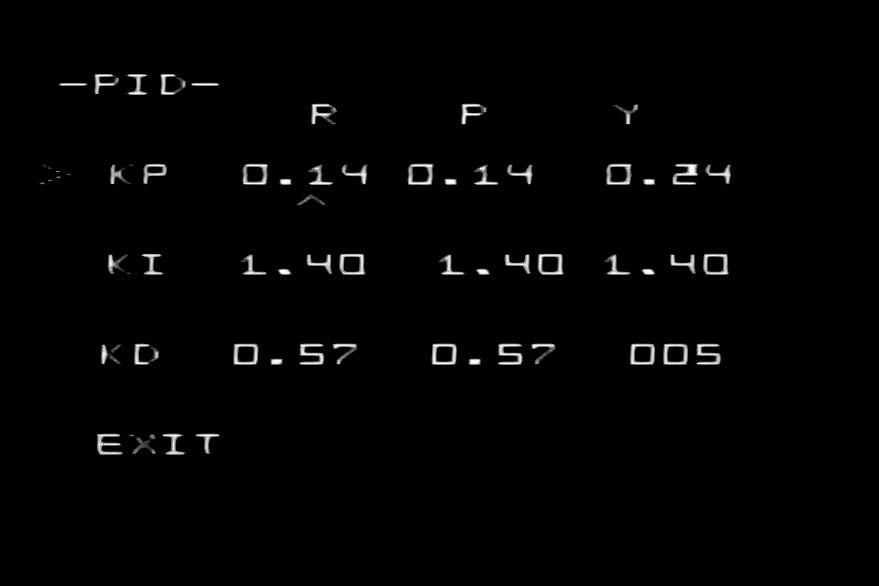
PID
PID設定。
Betaflightと同じですね。
CONFIG
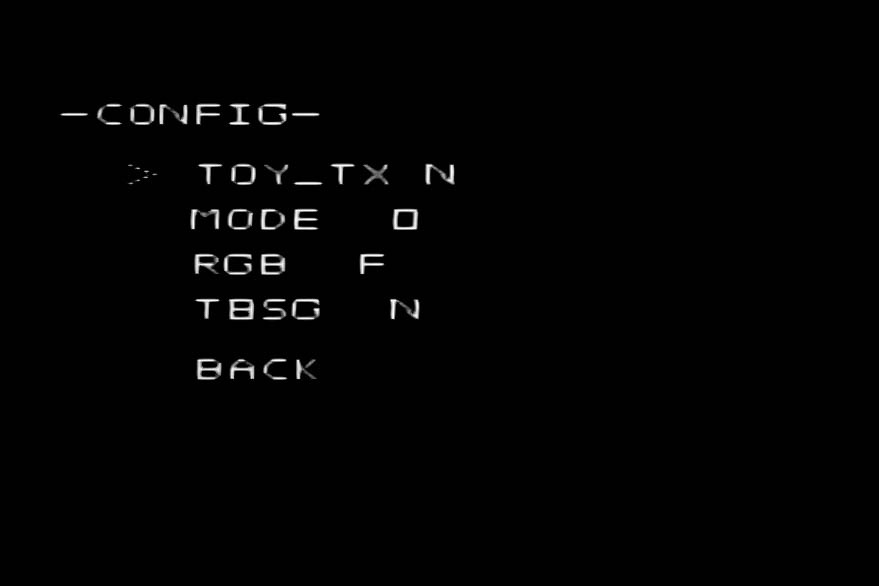
TOY_TX
デフォルトでは[N]に設定されています。
マルチプロトコル送信機で使用の場合、通常こちらの設定で問題ないかと思います。
CH5に割り振られているARMスイッチのON/OFFによりモーターを回転させる設定です。
また[Y]設定は、LiteRadio 1 TransmitterやE011付属送信機などトイ送信機用の設定です。
ARMスイッチの機能はなくなりスロットルを入れるとモーターが回りだす設定となります。
MODE
こちらは上記、[TOY_TX]を使用[Yに設定]した場合のフライトモードの選択です。
通常フライトモードは、CH5(ARM)・CH6(Levelmode)・CH7(Racemode)・CH8(Horizon)が割り振られていますが、トイ送信機(名前が?)ではCH5〜CH8がないので、こちらからフライトモードを選択します。
| 0 | Acro |
| 1 | Level |
| 2 | Race_a(Racemode Angle) |
| 3 | Race_h(Racemode Horizon) |
| 4 | Horizon |
RGB
FC搭載のRGB LEDのON/OFF設定。

RECEIVER
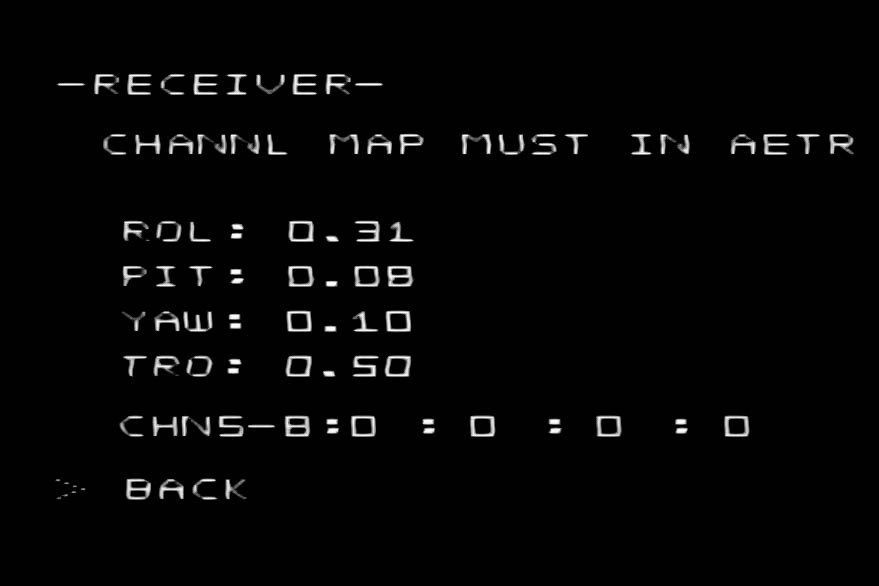
送信機の動作確認が出来ます。
スティックを動かすとスティックのポジションが数値で表示されます。
SMARTAUDIO

VTXの送信周波数を設定します。
Lite V2 FC内蔵のVTXは、A1:5865からE8:5917までの48CH周波数をサポートしています。
【POWER】で送信出力を設定しますが、内蔵VTXは25mW出力のみなので変更の必要はありません。
変更後【SET】を選択し、トップメニューの【SAVE】から設定の保存を行います。
DISPLAY
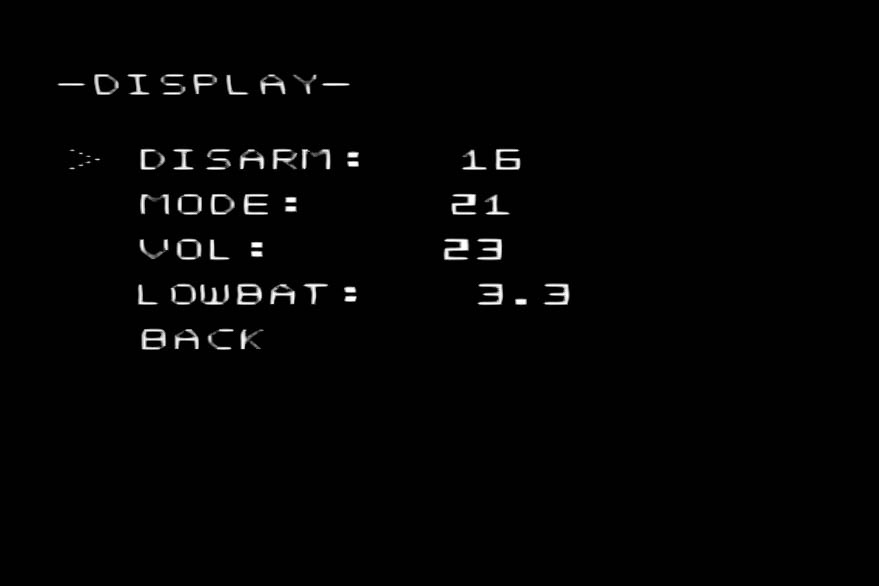
OSD情報の表示位置を変更することが出来ます。
OSD画面の上から1行目・2行目・・・と下まで32行割り当てられています。
表示されている数字はOSD画面上から何行目にその項目を表示するかということです。
例えば[DISARM]は16に設定されているので、16行目なので中央に表示されるということですね。
あとオプション項目があります。
【LOWBAT】は低電圧アラームの設定で、飛行中バッテリー電圧が設定値を下回るとOSD画面に「LOW BATTERY」と表示されます。(Betaflightと同じですね!)
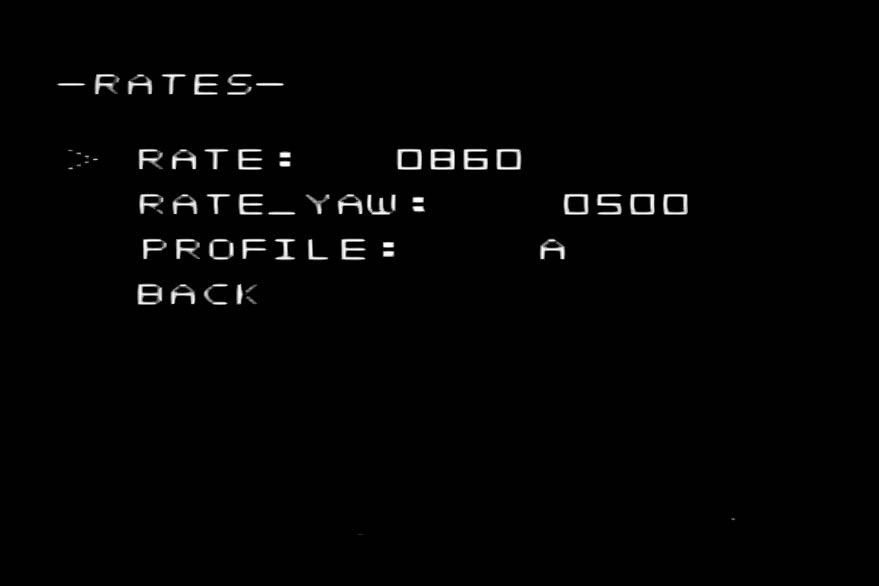
RATES
CHの割り振り!
以上がOSDメニュー画面からの設定項目となります。
あとは送信機へのCHの割り当てを簡単に説明しておきます。
フライトモードはこのように割り振られています。(TOY_TXがOFFの場合)
| CH5 | ARM |
| CH6 | Level |
| CH7 | Racemode |
| CH8 | Horizon |
ここでRacemodeという聞き慣れない?(私だけかな?)フライトモードが出てきたので踏まえてご説明。
Racemodeとはピッチ軸ではAcroモードで動作し、ロール軸ではAngleやHorizonとして動作するフライトモードのようです。
- Racemode_angle:ロール軸ではLevelmodeで動作する飛行モード(ピッチ軸ではアクロモードの動作)
- Racemode_horizon:ロール軸ではHorizonmodeで動作する飛行モード(ピッチ軸ではアクロモードの動作)
CH5〜CH8の組み合わせでフライトモードを設定していく感じとなります。

全てのフライトモードを送信機に割り当てて飛ばすのは、はじめてだと送信機側の設定が少し面倒となります。
Whoopをはじめたばかりの方でAngleモードでしかまだ飛ばさないという方は、【TOY_TX】を[Y(YES)]に設定し【MODE】を[1:Level]モードに設定した方がいいかもしれませんね!
最後に!

Silverwareはソースを変更しコンパイル、そしてST-LINKを使ってFCに書き出す等の手間がかかるイメージがありましたが、OSD画面から設定をサクッと変更出来るのは便利ですね!
Beta65S Liteはパワーがあり楽しい機体です。
V1 FCを使った同じ構成の機体と比べてもその違いが・・・
ESCが6Aにアップされたせいでしょうか?
そして、716 19000KVモーターは室内使用ではかなりパワーが有り余ります。
このBeta65S Liteがはじめて飛ばすWhoopだという方も多いかと思います。
Eachine E011などで使われている17500KVモーターの方がはじめてだと飛ばしやすいのかな?

以上、Lite FC V2の設定方法でした。
OSD画面から各種設定が出来るのは便利ですね。
VTX周波数の設定がズレてしまうのはバグなんでしょうか?
ファームウェアのアップデートも行えるので改善できるか後日試してみたいと思います。
あとExpoの設定項目がないようですが・・・


こちらのbeta65sのliteを購入し、遊んでいたのですがある時OSD画面からVTXのチャンネルを変えたところ映らなくなってしまいました。原因は僕が使っているゴーグル(EV800D)はチャンネルごとでしか受信できない為、周波数のずれていて受信できないのでは?と考えていますが初心者なため全然分かりません。できれば直す方法を教えてくれる助かります。
拙い長文失礼しました。