最近1セルToothpick『BETAFPV HX100 SE』にハマっております。
1セルでここまで飛んでくれると・・・面白くないわけがなく・・・。
1セルでもパワーがあり機体形状もToothpickなのでWhoopでいうと2セル機並みの飛びをしてくれます。

機体パワーがあるため1セルでも室内機というより野外機という位置付けの機体になるかと思います。
そんな楽しい1セルToothpickなんですが、もう少し小型サイズで室内向けのパワーを抑えた機体が作りたくていろいろとやっております。
テスト的にホイールベース80mmサイズの1セルToothpickを作っているのですが、機体に設置したFCの向きによりBetaflight設定の変更が必要で少し備忘録として残しておきます。
【Betaflight】FCの向きを変えた時の設定方法!
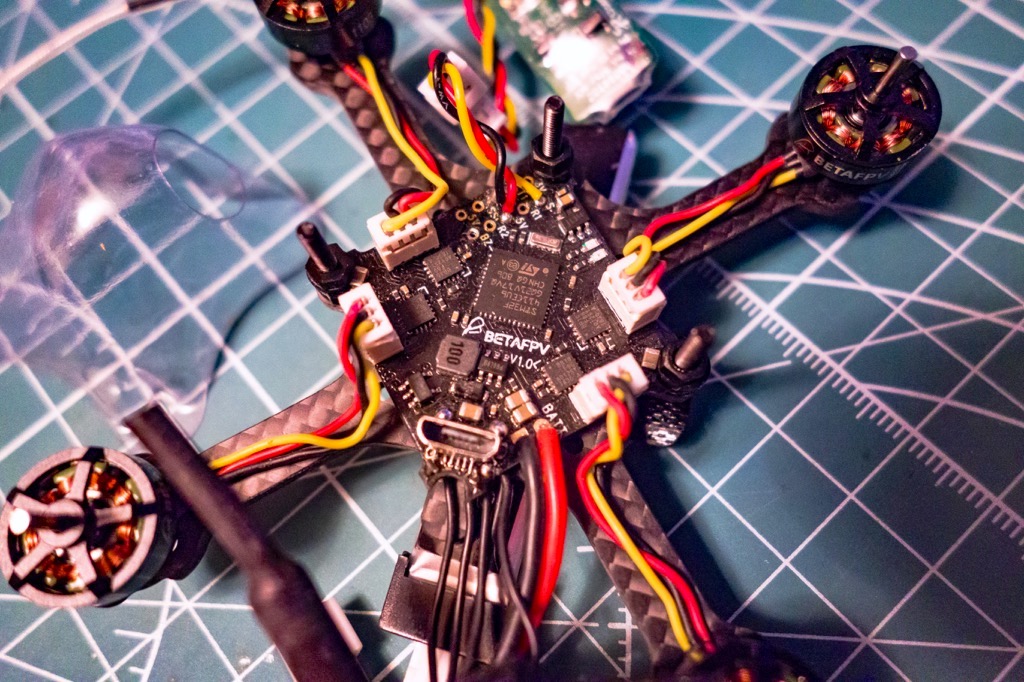
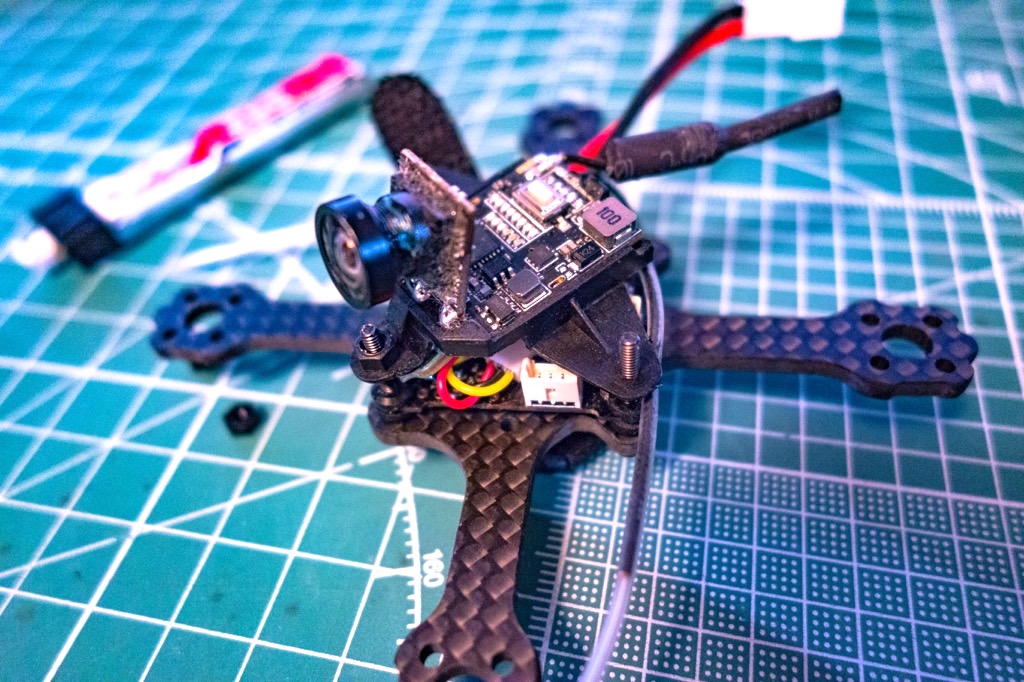
現在テスト的に作成している1セルToothpickを例に話を進めていきます。
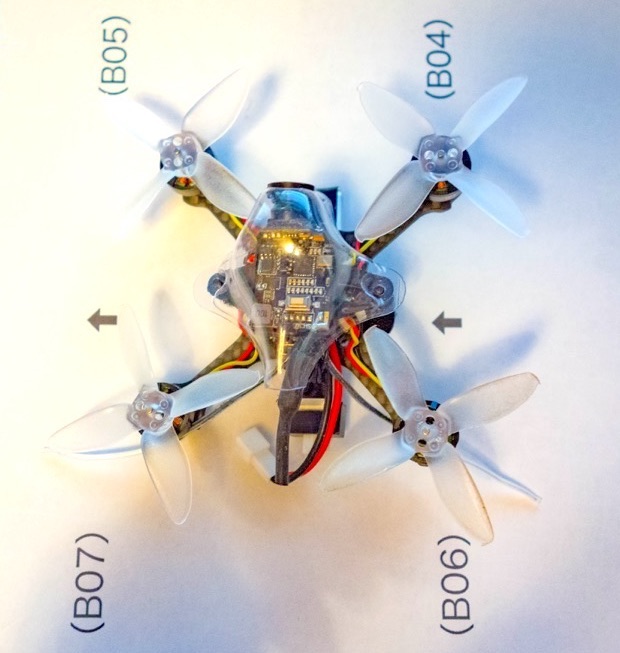
フレームの形状によりFCのモータープラグやUSB端子を上向きにする必要があり、このようにFCを180°反転させて設置しています。
当然、通常の状態からFCの向きを変えているのでBetaflightでの設定変更が必要となってきます。
FCの向きを調整する!
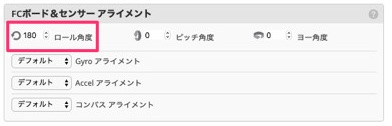
今回の場合、FCを180°反転させて設置しています。
ロール方向(左右)に180°反転させているので、Betaflightの【基本設定】でロール180°に設定します。
モーターアサインの変更!
通常、 Whoopのモーター番号(ESC)はこのように自分から見て機体前方を前に向けた状態で右下モーターが1番、右上モーターが2番、左下モーターが3番、左上モーターが4番とモーターの番号が割り振られています。

上記の設定でFCの向きの調整は出来ましたが、割り振られたモーターアサイン(割り振られた番号)はまだ反転した状態となっています。
試しに【モーター】タブから1つずつモーターを回してみると、1番モーターを回すと本来右下モーターが回るはずですが3番モーター(左下)がまわります。
他のモーターも回してみると分かると思いますが、FC反転によりモーターの位置も反転しています。
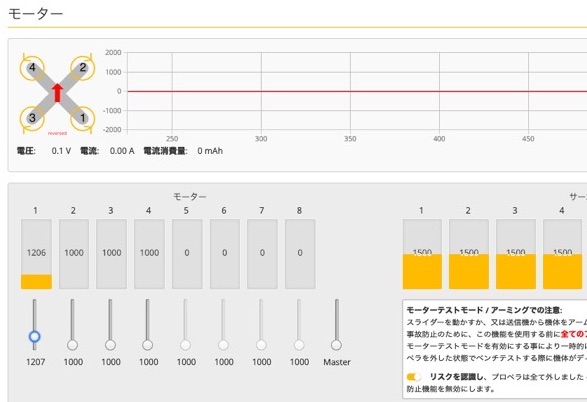
この割り振る番号(モーターアサイン)も変更する必要があります。
つまり今回の場合、180°ロール方向に反転させているのでこんな感じとなります。
4番モーター ← → 2番モーター
3番モーター ← → 1番モーター
この作業をやっていきます。
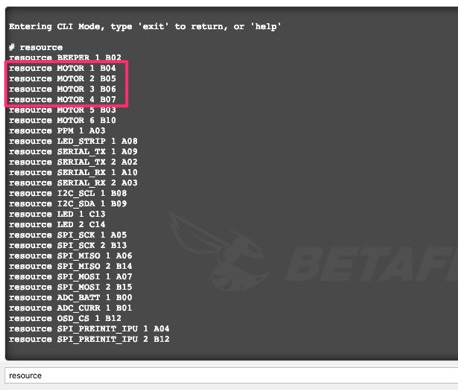
まずは【CLIコマンドライン】に[resource]と入力。
現在各モーターに割り振られている番号が確認出来ます。
今回使っているFCの場合、こんな感じで割り振られています。
1番モーター(motor 1) B04
2番モーター(motor 2) B05
3番モーター(motor 3) B06
4番モーター(motor 4) B07
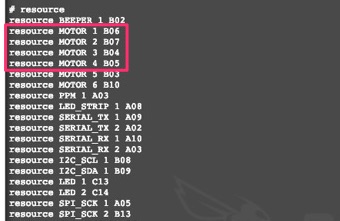
この割り振られた番号を上記のように入れ替えると(1番モーター←→3番モーター、2番モーター←→ 4番モーター)このようになります。
1番モーター(motor 1) B06
2番モーター(motor 2) B07
3番モーター(motor 3) B04
4番モーター(motor 4) B05
この作業を実際にやっていきます。
まずは一旦全てのモーターの割り振りを解除しておきます。
resource motor 2 none
resource motor 3 none
resource motor 4 none
最後に[save]で保存
そして各モーターに再度割り当てていきます。
resource motor 2 B07
resource motor 3 B04
resource motor 4 B05
最後に[save]をお忘れなく!
以上で設定は完了です。
一応、もう一度【CLIコマンドライン】に[resource]と入力して確認してみます。
モーターに割り振られた番号が入れ替わっていますね!
これで完了です。
まとめ!
今回、FCを180°反転さてた場合でやってみましたが、USB端子やピッグテールの位置により90°回転させたりといろいろ出来ます。
文章で書くと少しややこしいのですが、このように紙に書いて向きを動かしてみると分かりやすいかもしれませんね!
例えば90°FCの向きを変えるとこのようにモーターに割り振られた番号の位置も変わってきます。
この場合、ヨー方向に-90°回転させているので【基本設定】でヨー角度を-90°に設定し、あとは上記方法によりモーターアサインの変更をしてやればいいという事ですね!
今回割り振られたモーターのリソースをリマッピングしてFCの向きを調整しました。
少し話がそれますが、Sailfly-Xでも同様にFCを反転させて設置していましたがBetaflightではこのように設定されていました。


この辺りの調整でもっと簡単に設定する事が可能なんでしょうか?
同様にいろいろやってみたのですが上手くいかず、今回リソースのリマッピングという方法を取りました。
このあたりもう少し勉強せねばという事で・・・備忘録として残しておきます。


[…] https://burariweb.info/drone/betaflight-fc-direction-change.html […]