昨年夏あたりから電子工作なんてものを始めたのですが、Arduinoなどマイコンボードを使ってなにか動くものを作ってみたい・・・なんて考えるようになると3Dプリンタは必須アイテムとなってきます。
3Dプリンタで使えるパーツなどのSTLデータはネット上に多数上がっていますが、自分がイメージしたものを形にするにはどうしてもCADの知識が必要となってきます。
そんなことで3Dプリンタを購入する前にまずは3D CADソフト『Fusion360』の勉強をするようになり、ようやくですがここまでパーツを作り動くものが作れるようになりました。
この投稿をInstagramで見る
さらに複雑に動くもの?など製作するのに平歯車(Sper Gear)も作れれば便利だと思いテストモデルを作っていろいろと勉強しております。
今回、Fusion360を使って平歯車(Sper Gear)を作りそれをCAD上で動かすまでを少し見ていきたいと思います。(自分への備忘録です)
歯車の設計専用のソフトもあるようですが、Fusion360を使えば簡単なものならアドインを使うことにより比較的簡単に平歯車(Sper Gear)を作って動かすことが出来ます。
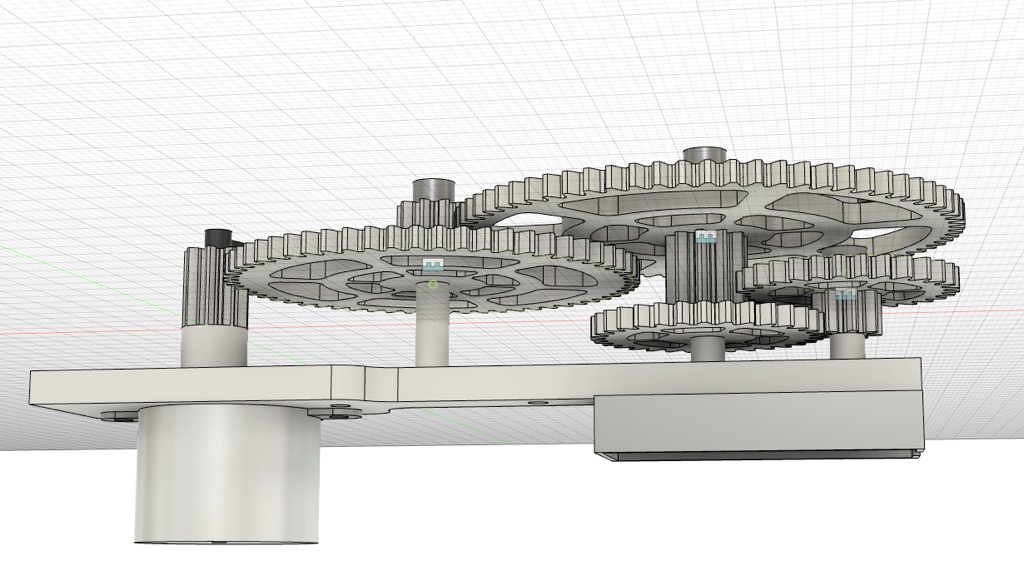
歯車の知識が付きその理解も深まってくると、実際に3Dプリンタでパーツを出力させ歯車時計なんてのも作れるようになりました。
この投稿をInstagramで見る
歯車って動いているのを見ているだけで面白く、そしてさらに使いこなせればこれから何か動くものが作れそうでワクワクしますね!
そんな事で少し前置きが長くなりましたが、Fusion360でSper Gear(平歯車)を作るのは比較的簡単に出来ます。
Fusion360には標準でアドイン(スクリプトデータ)が搭載されていますが、この標準搭載されているアドインにはいろいろとあります。
その中にある『Sper Gear』というものが歯車作成で使えるアドインとなります。
歯車のモジュールや歯数、厚みや穴の径などのパラメーターを指定するだけで比較的簡単に歯車自体は作れます。
圧力角・モジュール・フィレット半径など歯車を構成する聞き慣れない用語が多数出てくるので自分への備忘録として残しておきます。
目次
Fusion360でSper Gear(平歯車)を作成し動かしてみる!
Fusion360を使って大きさの違う歯車を作成し、歯車同士を噛み合わせて実際に回転するモーションを付けてCAD上で動かしてみたいと思います。
歯車自体の作成(形状)はデフォルトで搭載されているアドインからパラメーターを設定すれば簡単に作成することが出来ますが、それを固定してモーションを付けるための土台部分のパーツも必要となってきます。
このあたりのモデリングに関しては今回少し割愛しながら解説していきます。
それではまず歯数の違う2つの歯車を作ってみます。
Super Gear(平歯車)で使われる用語
Fusion360ではSper Gear(平歯車)を作成するためのアドインがデフォルトで用意されています。
[ツール]から[アドイン]→[スクリプトとアドイン]を選択します。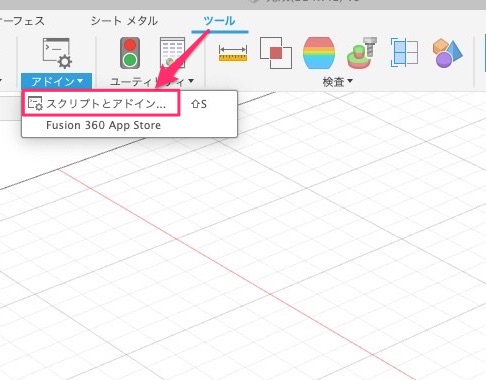
【スクリプトとアドイン】内にある「Sper Gear」を選択します。

そうするとSper Gearを作成するためのパラメーターの設定画面が開きます。
使われている用語が多いので少し簡単に見ていきます。
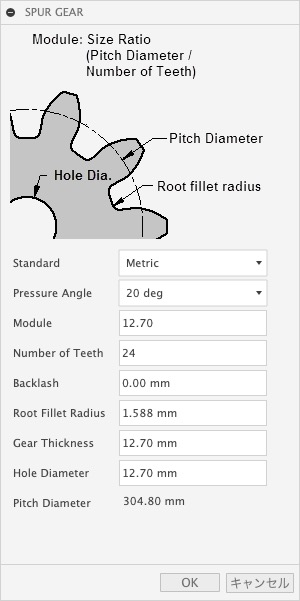
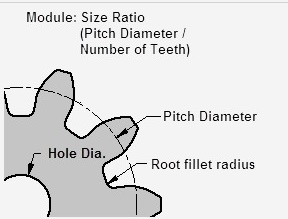
最終的に出来上がる歯車の大きさPitch Diameter(ピッチ円の直径)は自動計算されます。
その際、モジュール(Module)と歯数(Number of Teeth)のパラメーターが計算に使われこの項目がSper Gearでは重要になってきます。
モジュールはピッチ円の直径(基準円直径)を歯数(Number of Teeth)で割った値となります。
2つの歯車を噛み合わせるにはこのモジュールの値を一致させる必要があります。
モジュール(Module) = ピッチ円直径(Pitch Diameter) / 歯数(Number of Teeth)
歯車を動かす場合、その用途により大きさや歯数が異なるものを噛み合わせる必要があるわけですが、この場合モジュールの値が一致していないと噛み合わすことが出来ません。
逆に言うと大きさや歯数が異なる歯車でもモジュールが一致していれば噛み合わせて動かすことが出来ます。
そして出来上がる実際の歯車の大きさ(ピッチ円直径)は、上記式より
ピッチ円直径(Pitch Diameter) = モジュール(Module) × 歯数(Number of Teeth)
ということになります。(これは自動計算されます)
これを踏まえ大きさの違う歯車を作っていきます。
まずは用語から。
基準(Standard)
歯車の規格の設定。
「Metric」を選択すると単位がmm、「English」を選択するとインチ単位になります。
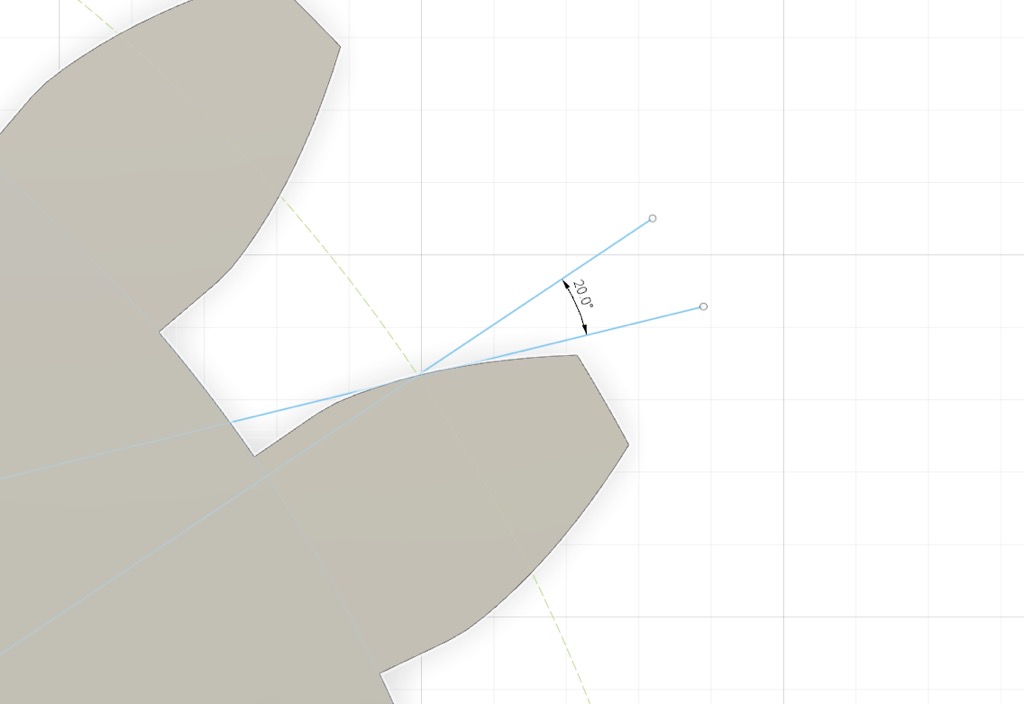
圧力角(Pressure Angle)
歯先の角度(圧力角)を表します。
半径方向線と歯型に接する直線とが成す角度となります。
デフォルト値で20°が設定されていますが変更する必要はありません。
モジュール(Module)
歯車の大きさの比率を表します。
ピッチ円直径を歯数で割った値となります。
歯車同士を噛み合わせるにはこの値を同じ値にする必要があります。
歯数(Number of Teeth)
歯車の歯の数(ギザギザの数)。
モジュールとこの歯数からピッチ円の直径が決まるので、この数値を調整して歯車の大きさを決めます。
Backlash
歯車同士を噛み合せた際の遊び部分。
値を大きくしていくと細くなっていきます。
Root Fillet Radius
歯の根元部分のフィレット半径を指定します。
モジュールを小さくした場合、当然作成できるフィレット半径は小さくなっていきエラーが起こりやすいので注意です。
Gear Thickness
歯車の厚みを指定します。
Hole Diameter
歯車中心の穴の直径を指定します。
ピッチ円直径(Pitch Diameter)
出来上がる歯車のピッチ円の直径。
歯数とモジュール数によって自動計算されます。
この値から歯車のおおよその大きさが分かります。
アドイン『Sper Gear』で歯車を作成する
聞き慣れない用語が多く出てきましたがSper Gear(平歯車)の場合、異なる大きさの歯車や歯数が違う歯車をちゃんと噛み合わすためにはモジュールの値を一致させて作る必要があることが重要となります。
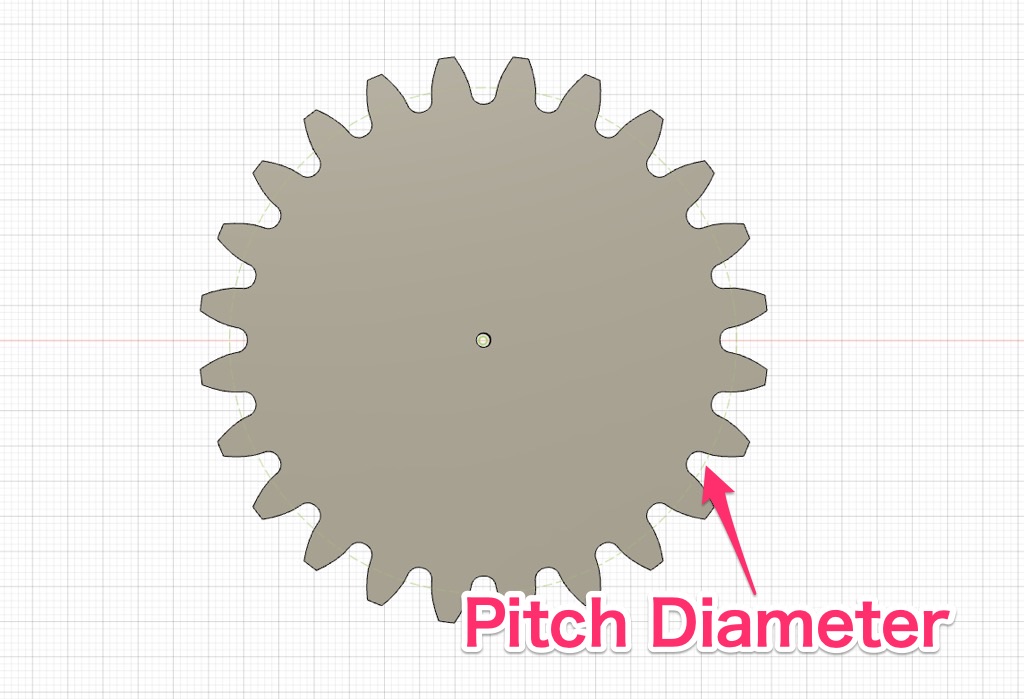
試しに1つ歯車を作ってみます。
上記アドインから歯車の初期設定画面(パラメーター設定)から今回このような設定で歯車を作ってみました。
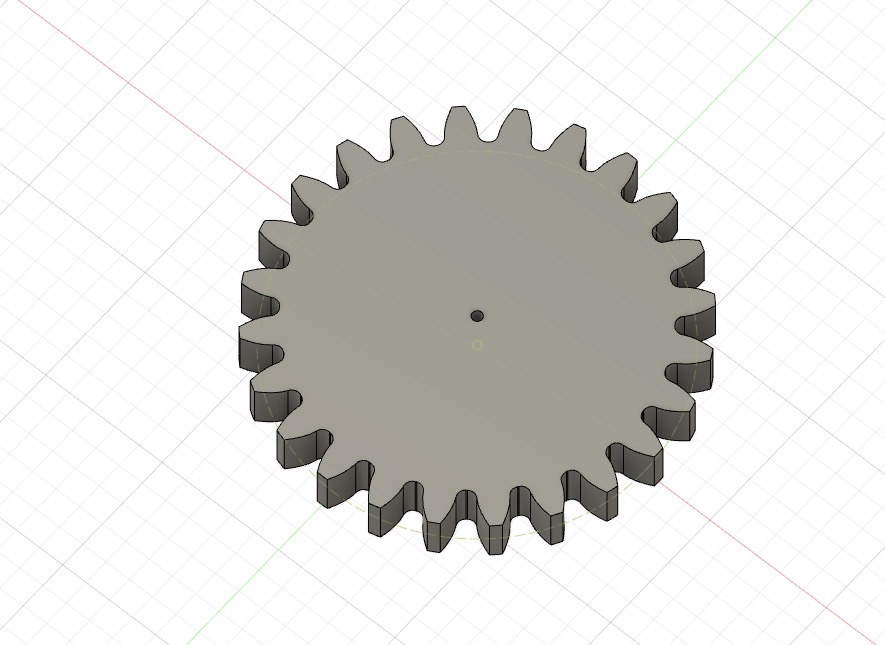
モジュールを3・歯数24に設定しました。(歯車の厚みや穴のサイズは適当で問題ありません)
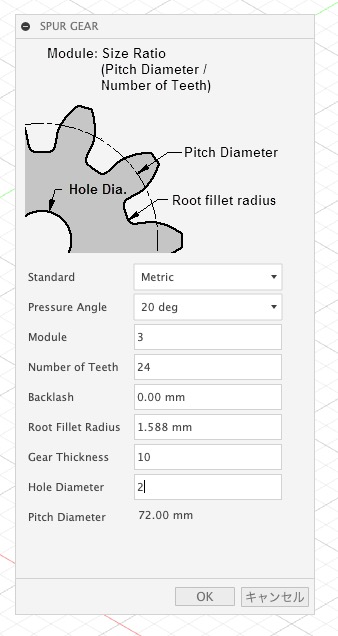
ピッチ円直径(Pitch Diameter)は上記モジュールと歯数の関係式から自動計算され72mmとなりこんな感じで歯車が出来上がりました。
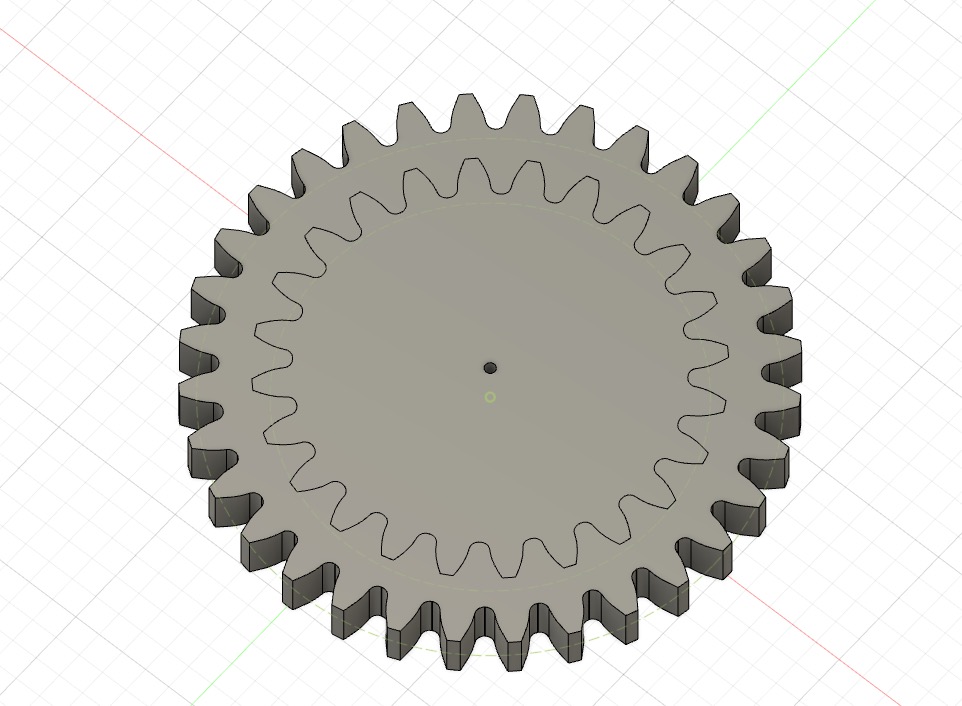
次にもう一つ大きさの違う歯車を作ってみます。
モジュール値が一致していないと歯車を噛み合わすことが出来ないのでモジュール3は変更しないように!
ここでは歯数を32としてみました。
ピッチ円直径が96mmの少し大きな歯車となります。

こんな感じで重なっていますが2つの歯車が出来ました。
重なっているのでここから移動させ歯車を噛み合わせてみます。
どちらでもいいのですが、はじめに作った歯数24の小さい歯車を移動させてみます。
歯車(コンポーネント)を[移動]コマンド(右クリック)で動かしていきます。
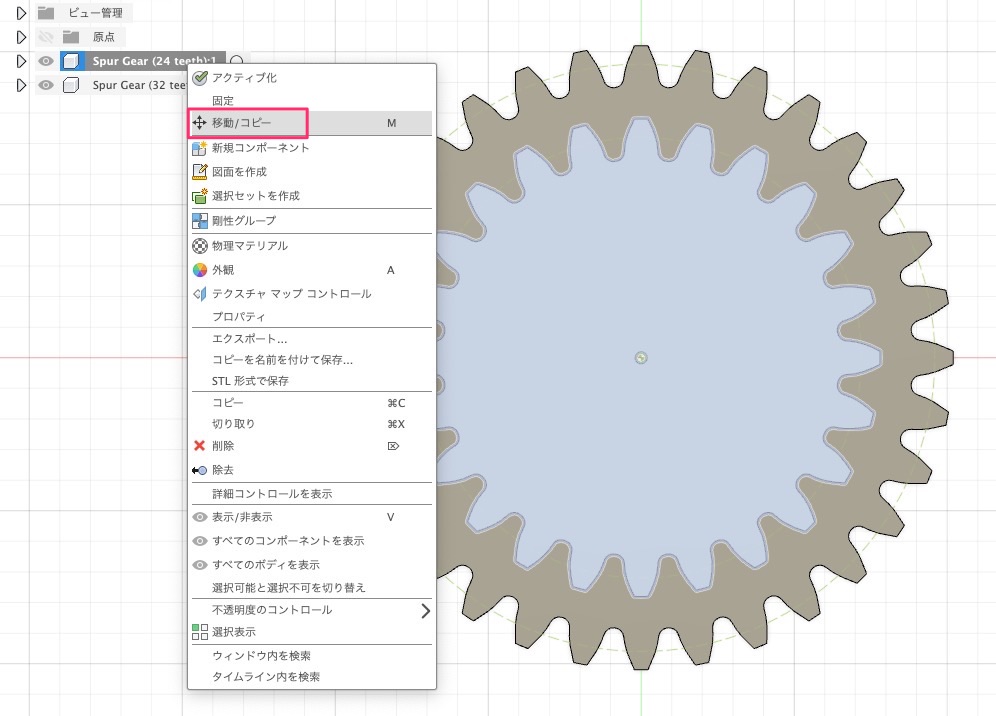
この時お互いの歯車のピッチ円が重なる位置に合わせます。
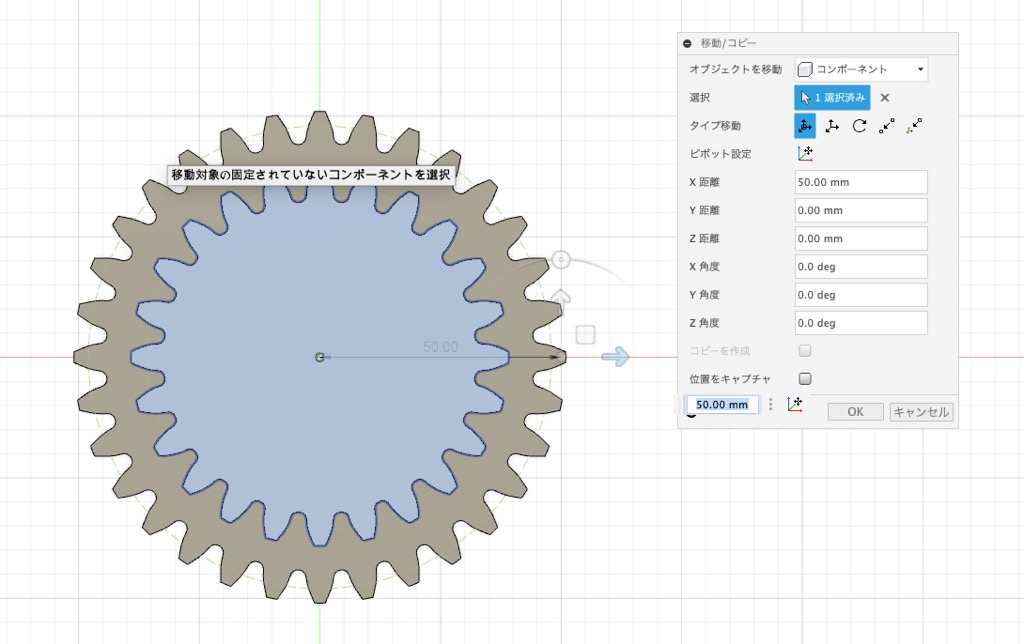
今回ピッチ円直径が72mmと96mmの歯車なのでその半径を足した値84mm(36mm+48mm)を指定するとピッチ円が重なる位置となります。
こんな感じでお互いのピッチ円の円周がうまく交わりました。
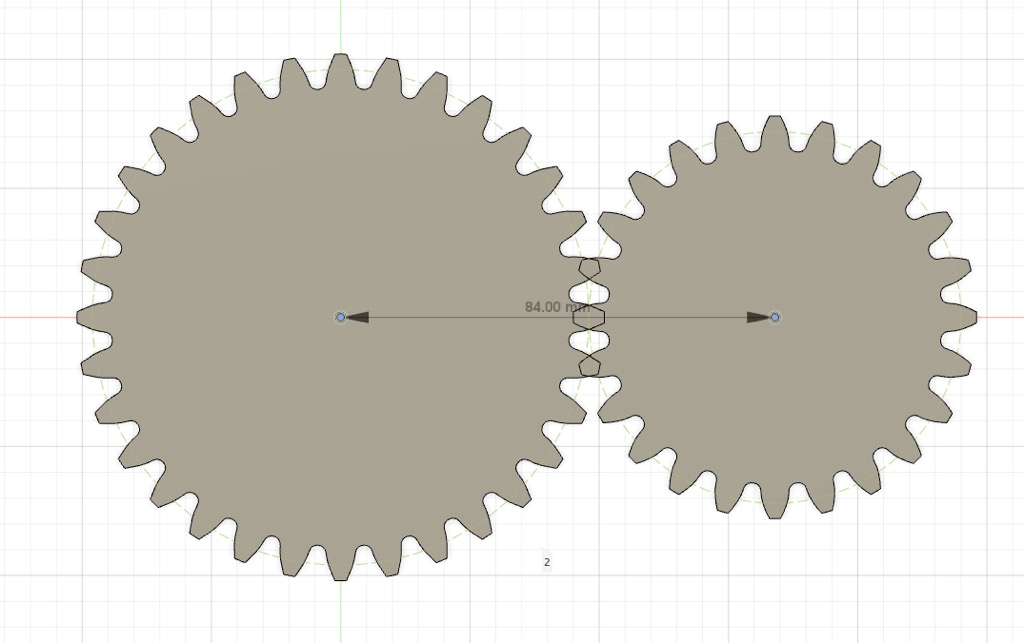
この状態では歯車の歯同士が重なっているので角度を調整します。
仮に小さい方の歯車を少し回転させてみます。
先程移動させた際に角度も動かせばよかったのですが、もう一度移動コマンドから角度を指定します。
歯数24枚の歯車なので、360 / 歯数(24) / 2 = 7.5°回転させればお互いの歯車の歯がピッタリと噛み合います。
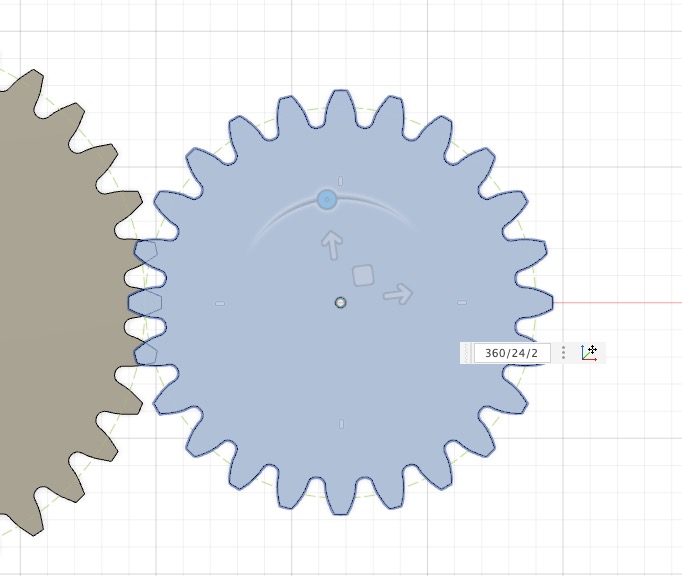
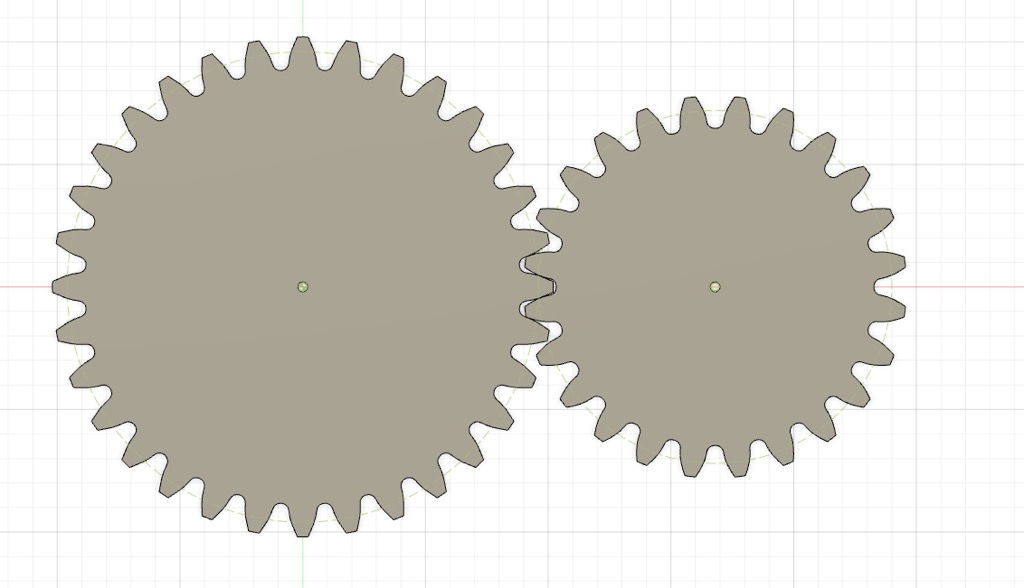
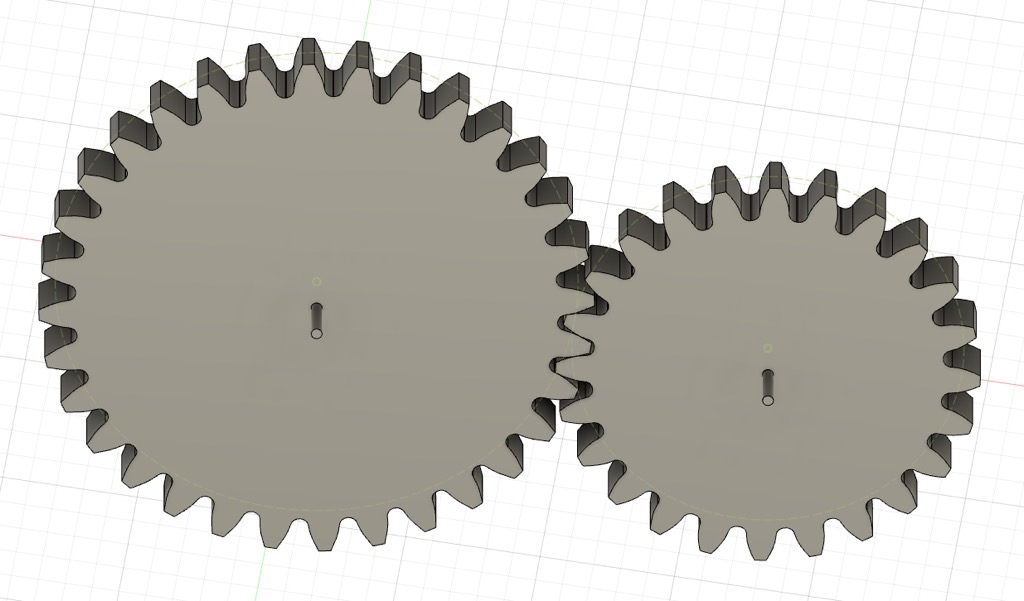
CAD上で2つの大きさの異なる歯車を噛み合わせることが出来ました。
このようにモジュールが一致していると歯数(歯車の大きさ)に関わらず綺麗に噛み合わすことが出来ます。
ここまで出来ればCAD上で実際に歯車を動かすことも出来ます。
CAD上で歯車を動かしてみる!
デフォルトで用意されているアドインを使えば比較的簡単にSper Gearを作ることが出来ました。
そしてモジュールが一致している歯車同士は綺麗に噛み合わすことが出来ることも分かりました。
それでは実際に動かしてみたいと思います。
手順としてはこんな感じとなります。
- ジョイントで各歯車を回転させる
- モーションリンクで各歯車の回転を連動させる
①ジョイントで各歯車を回転させる
まずは各歯車を[ジョイント]を使って動かしてみます(回転させる)。
作成した歯車を回転させるには、その基準となる軸が必要となってきます。
まずはこの回転軸を作成します。
今回歯車の中心穴は2mmに設定しているので2mmの円柱を押し出して作ります。(新規コンポーネント)
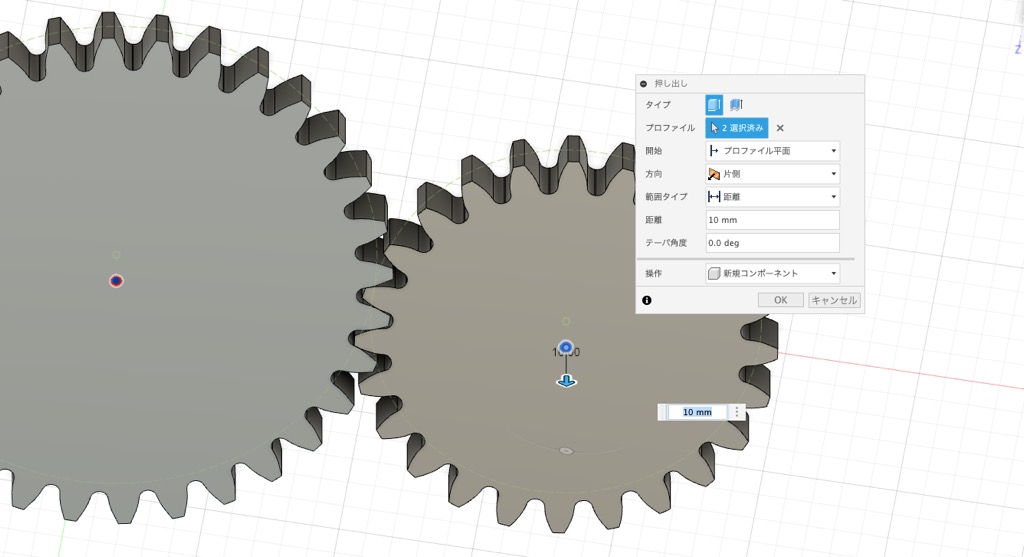
これで歯車の回転の基準となる軸ができました。(長さは適当で大丈夫です)
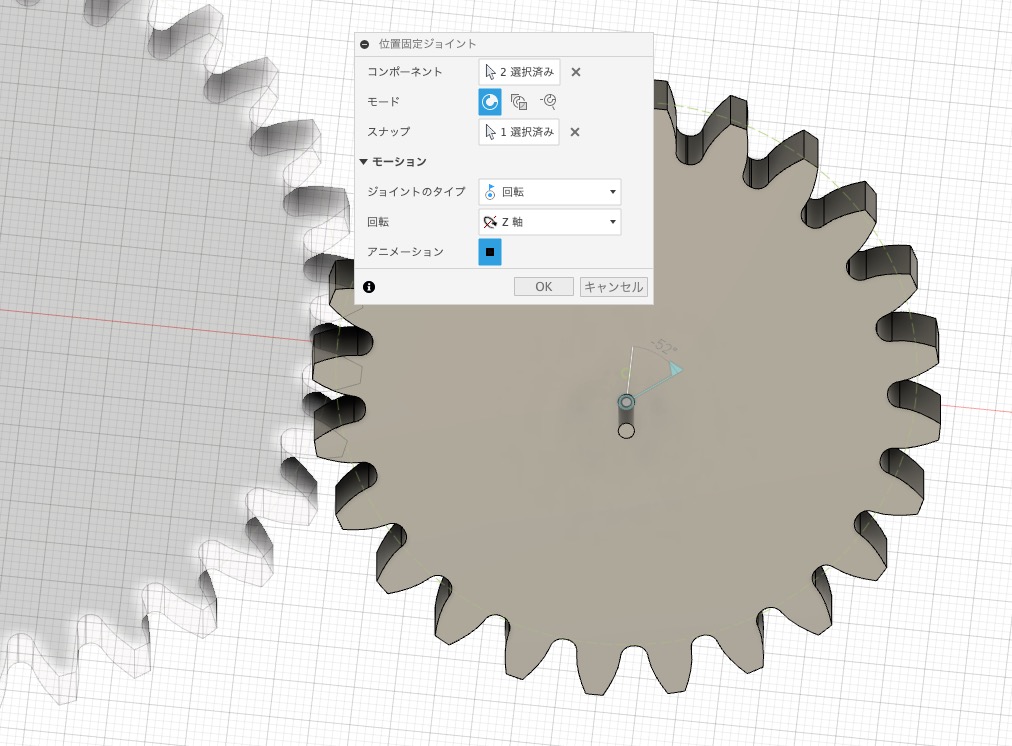
ここから[ジョイント]で回転を付けていきますが、基準となるこの軸が動かないように「固定」を適用しておきます。

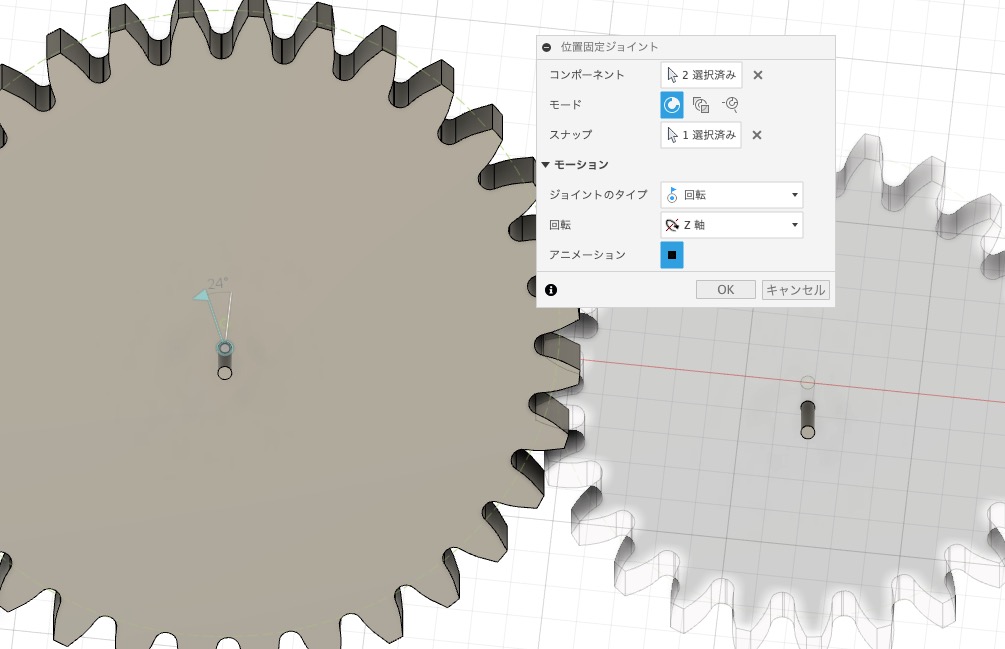
それぞれの歯車に[位置固定ジョイント]を使い回転を適用します。
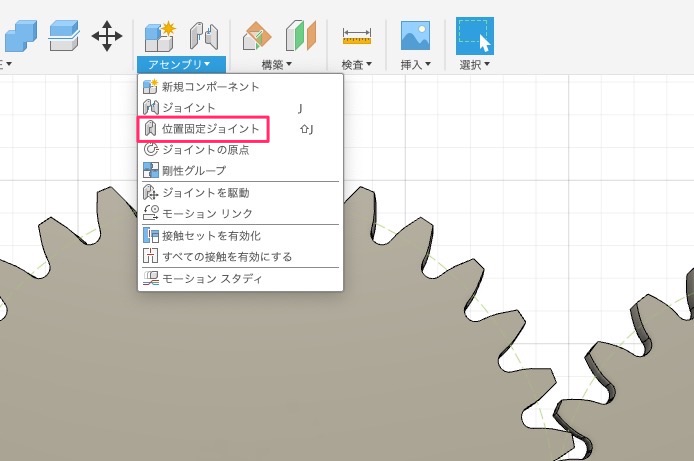
2つの歯車に軸を中心に回転を付けていきます。
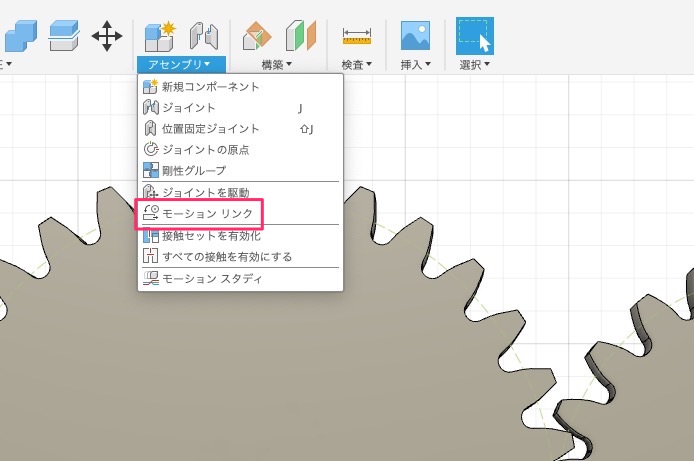
②モーションリンクで各歯車の回転を連動させる
2つの歯車がそれぞれ個別で回転出来るようになりましたが、次にこの2つの歯車の回転をリンクさせます。
[モーションリンク]を使えばそれぞれの歯車の「回転」をリンク(関連付け)させ動かすことが出来ます。
そして2つの歯車の歯数の比から動きを関連付けしていきます。
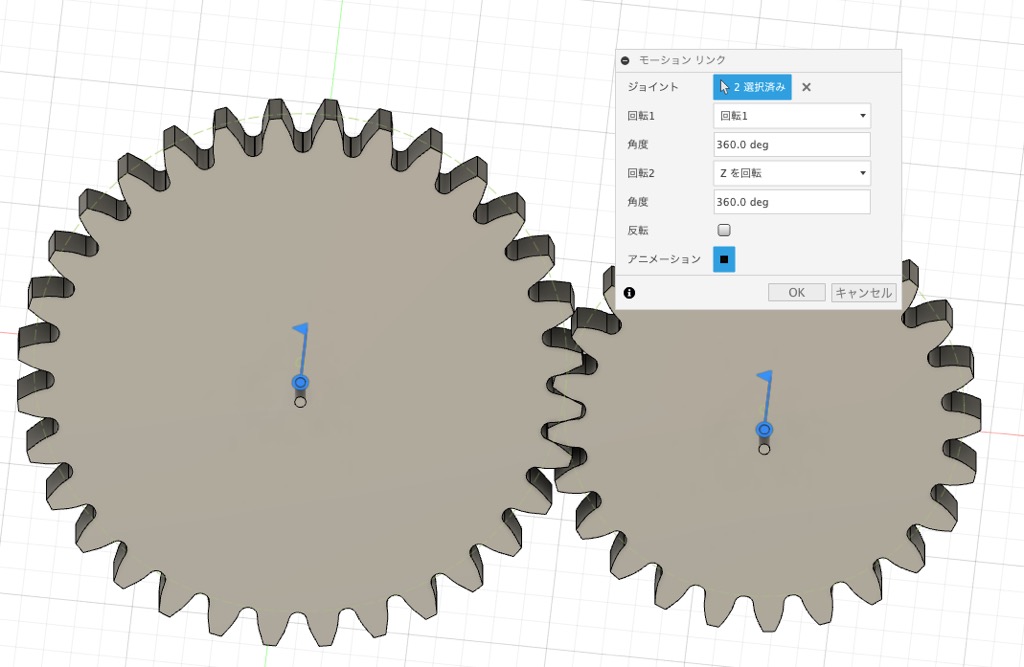
今回使っているのは歯数24と歯数32の歯車です。
つまり24枚の歯車が1回転(360°)した時、32枚の歯車は360×24/32=270°回転することになります。
モーションリンクでこのように角度指定します。
歯車の回転方向はそれぞれ逆方向となるので「反転」にチェックを入れて完了です。
これで綺麗に2枚の歯車が噛み合い、そして回転していると思います。

こんな感じで歯車をモーションリンクで連動させていけば複数の歯車や2段歯車をCAD上で動かすことが出来るようになります。
この投稿をInstagramで見る
最後に!

Fusion360のアドインを使えば比較的簡単に平歯車(Sper Gear)を作成することが出来ました。
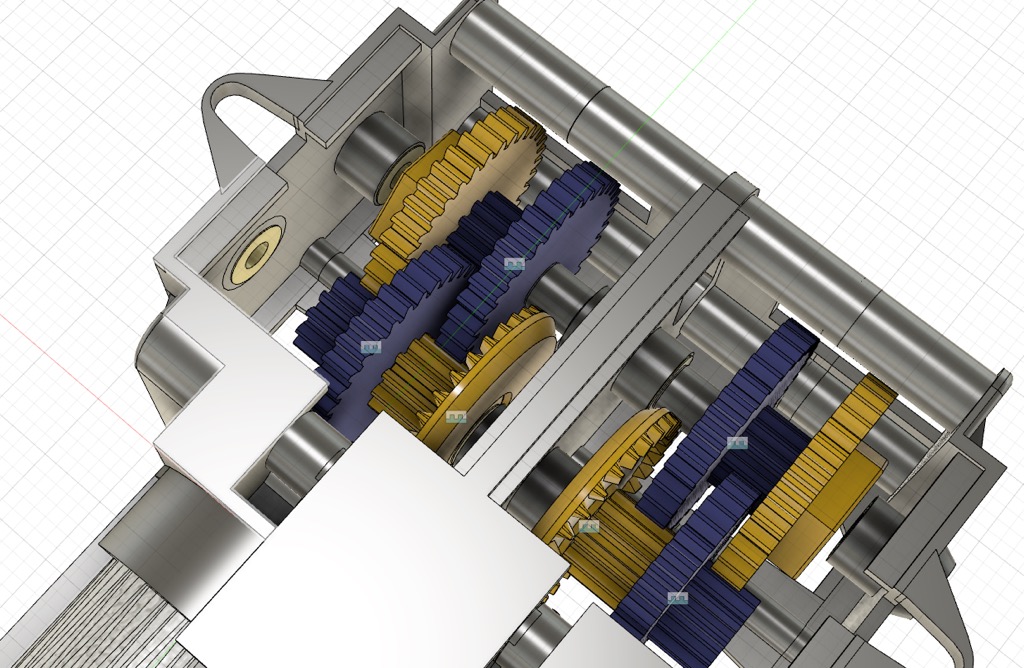
そして2段歯車機構を使えばもう少し複雑なギヤボックスなんてものも動かすことが出来ます。
こちらはタミヤのダブルギヤボックスをCAD上で完全再現してみたものですが、よく出来た構造ですね!
歯車の配置を変えると減速比を変えることができ、今回ご紹介した平歯車の理解を深めるのに非常に良い教材かと思います。
この投稿をInstagramで見る

そんな事で少し早足でしたがFusion360で歯車を作成し、実際に噛み合わせて動かすまでをご紹介しました。


spur gearねー