電子工作やホビー用途でよく使われるサーボモーターにSG90というマイクロサーボがあります。
電子工作という趣味を始めて1年が経ちましたが、個人的に一番よく使っているサーボモーターです。
数百円程度と安価な価格で購入することができ、小型な割に比較的トルクもあることから工作用途では非常に使いやすく重宝するサーボモーターだと思います。
これまでこのSG90を使っていろいろなものを作ってきました。
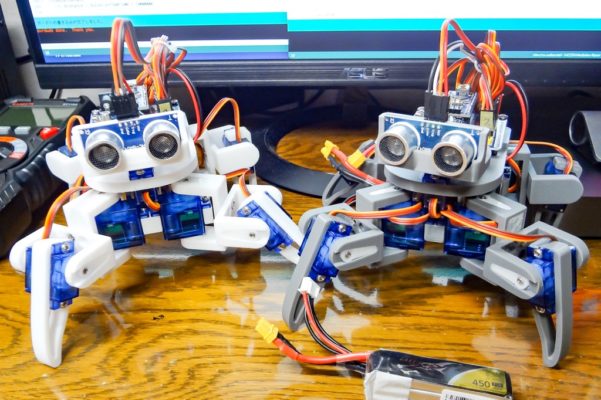
その一例として、このような8つのSG90を使って動かす4足歩行ロボットを作りました。
SG90は重量9gと小さなサーボですが、非常にパワフルに動かすことが出来ます。
https://youtu.be/fYuISMFKt2A
そして現在、上記ロボットに1関節増やした12サーボ駆動の4足歩行ロボットを製作しています。
このように工作用途で便利に使えるSG90サーボモーターなんですが、故障もよく起こります。

特にこのような製作物に組み込み負荷がかかった状態で動かしていると急に動かなくなったりと・・・その故障の発生も多くなります。
今回は壊れて動かなくなったSG90の修理方法をご紹介したいと思います。
SG90の故障の原因としてこれまで経験してきたものではケーブルの断線が一番多いようでした。
次に内部のギアの破損、そして高負荷による制御回路の破損やモーター内部のコイルの断線がSG90の主な故障原因となるようです。
制御回路に組み込まれているチップ(IC)の破損やモーター内部のコイル断線の修理はほぼ不可能ですが、ケーブルの断線やギアの破損であれば比較的簡単に修理が可能です。
SG90サーボモーターは安価なサーボモーターなので新品を買ってしまってもいいのですが、内部の構造が分かれば修理も簡単なのでご紹介したいと思います。
目次
動かなくなったSG90サーボモーターを修理してみる!

SG90サーボモーターについて
重量9gの小型マイクロサーボSG90やその姉妹製品となるMG90・SG92RなどはTower Pro製のものが正規品となります。
SG90系列のマイクロサーボはTower Pro製のもの以外にも多数のコピー製品(互換品)が販売されています。
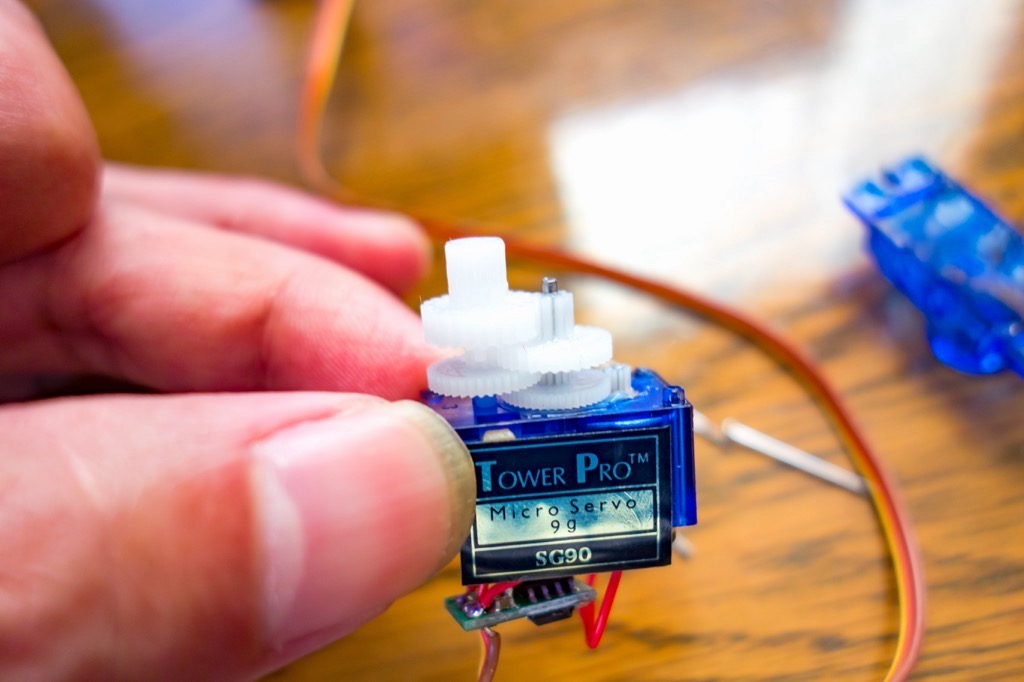
Tower Pro製のものと他のコピー製品とでは配線の取り付け位置や内部で使われているギアの素材、外枠の寸法など多少の違いがあります。
冒頭でご紹介した4足歩行ロボットをTower Pro製サーボを使ったものと他の互換サーボを使ったものと2台作り動かしてみましたが、特に大きな性能の違いは感じられませんでした。
そんな事から私の場合特にこだわってTower Pro製のものを使うことはありませんが、正規Tower Pro製のSG90と互換品とでは先述のように多少の違いがありますが、内部の構造は同じなので修理方法の手順は同様のものとなります。
SG90の故障の主な要因
SG90サーボモーターの故障の主な要因として次の3つが挙げられます。
- ギアの破損
- ケーブルの断線
- 制御回路の故障
①ギアの破損
SG90は小型な割に比較的トルクが高いサーボモーターとなります。
そのストールトルクは1.8kg/cm(4.8V)となっています。
そこそこのトルクがあるため、製作物に組み込んだ際などで高いテンションがかかった状態で動かしていると内部のギアが破損する場合がります。
SG90では内部のギアはプラスチック製ギアが使われています。(MG90ではメタルギアとなっています)
そのためスペックを超える力が加わるとギアが破損しやすいようです。
ケーブルの断線が問題なく、通電時にモーターの空回りが確認できればギアの破損が原因となります。
またギアの破損が原因の場合でも、ギア自体が回らなくなりモーターが動作しない場合もあるので、ギア交換で復活する可能性もあります。
②ケーブルの断線
SG90の故障原因の中で一番多いのがケーブルの断線だと思います。
SG90は重量9gの小型サーボなので内部の制御回路が乗った基盤も小さく、そこにはんだ付けされているケーブルも断線しやすい構造となっています。
上記4足歩行ロボット製作時や他の製作物でも何度も遭遇しましたが、製作物が動く際にケーブルも引っ張られて内部の断線が起きやすいようです。
③制御回路の故障やモーターのコイルの断線

上記ケーブルの断線やギアの破損が原因でない場合、内部の制御回路やモーターの破損が考えられます。
スペックを超える力が加わった状態でサーボモーターに通電し続けた場合、サーボは指定角度まで動かそうとしますがトルクが足りずモーターに高負荷がかかった状態となります。
この状態が続けばこんな小さなサーボでも触ってみると結構高温となっているのが確認できます。
この状態で通電し続けると内部にあるDCモーターのコイルが焼き切れたり、制御回路が破損してしまいます。
この場合の修理はほぼ無理そうで、安価なサーボなので新たに購入した方が効率はよさそうですね。
この3項目がこれまでSG90の故障で私が遭遇したを故障原因の大半となります。
それではSG90をバラして修理していきます。
SG90の分解
それではSG90を分解していきます。
Tower Pro製のものやその他多く販売されている互換品などでポテンショメーターや固定ビスの本数等多少の違いがありますが、基本的に構造は同じなので問題ないかと思います。
今回は、以前製作物に組み込んでいて動かなくなった数個の互換SG90を修理してみました。
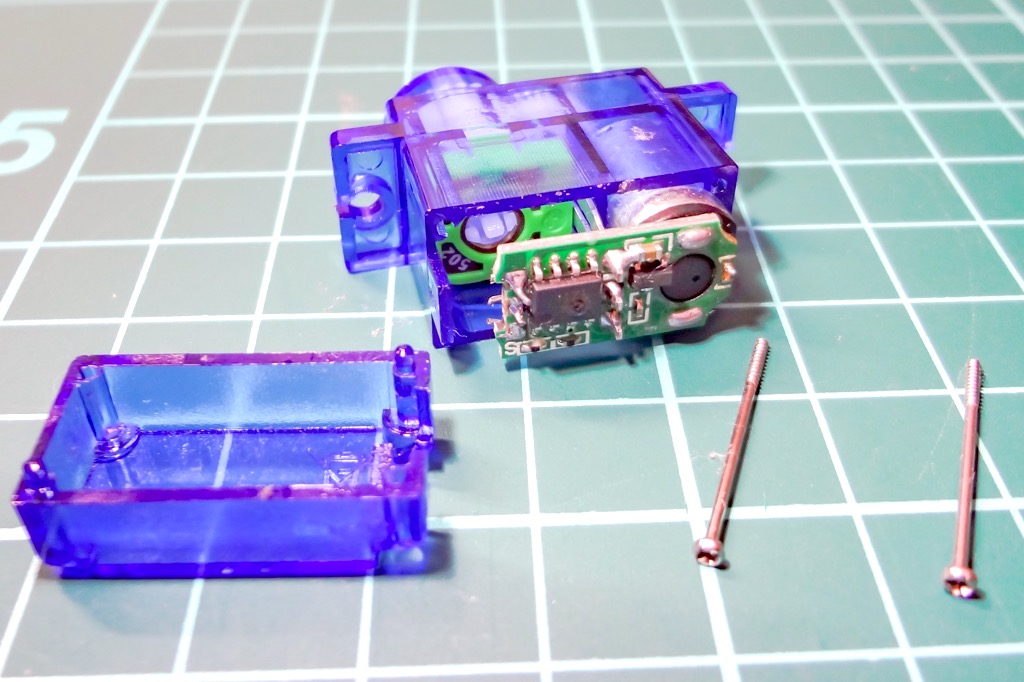
分解の際、ボディーに貼られているラベルシールは剥がした方が作業はしやすくなります。
分解には底面のビスを2本(4本タイプのものもあります)を外し外枠を分離していきます。
外枠は3パーツ構成となっています。
SG90のギア構成
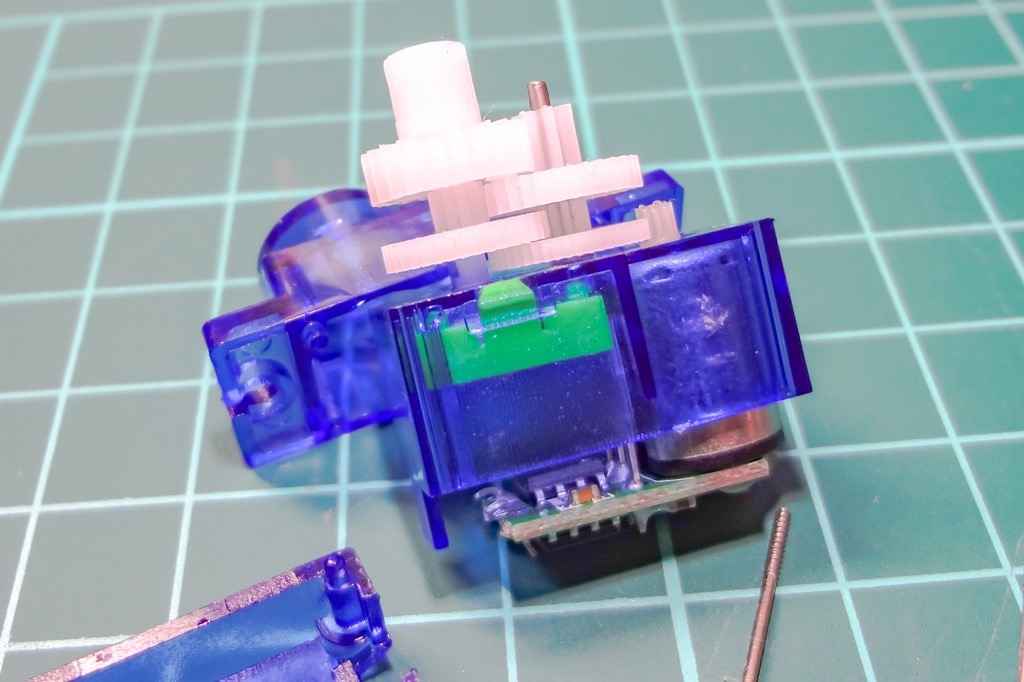
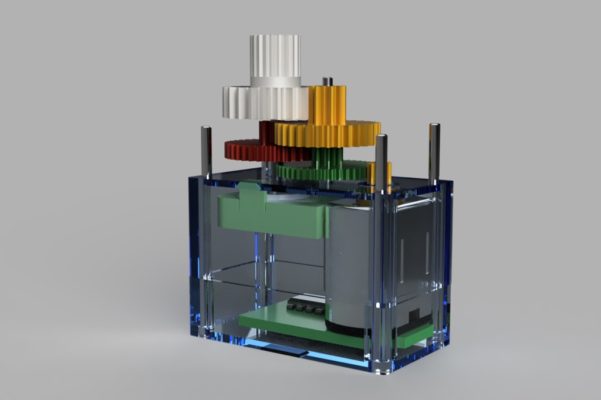
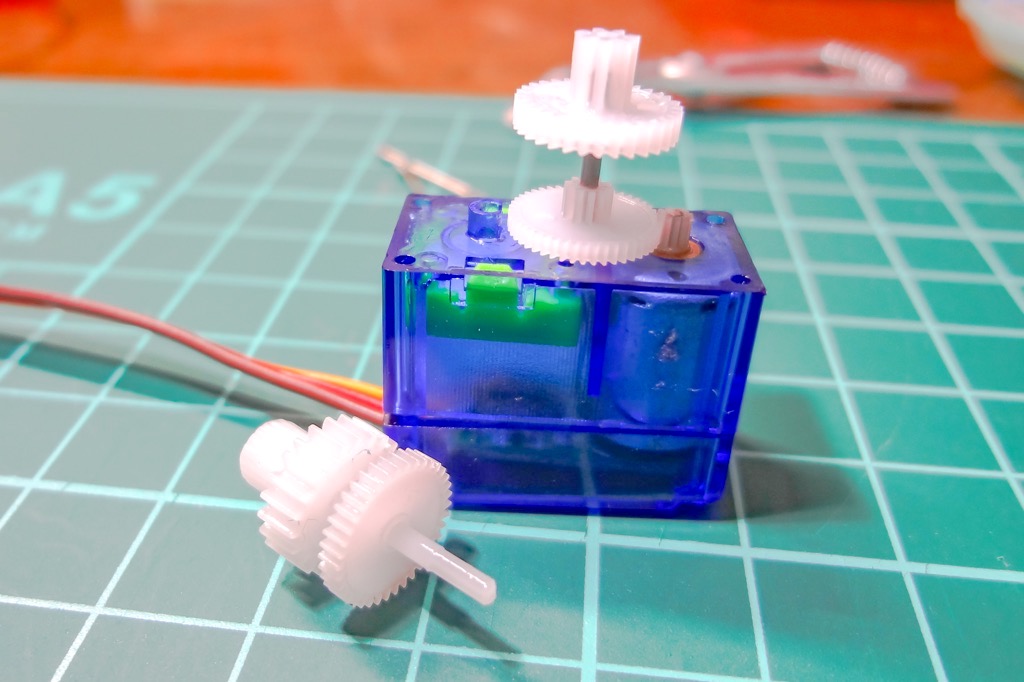
まずは上蓋を外しギアの確認をしていきます。
ギアはこのような組み合わせになっています。
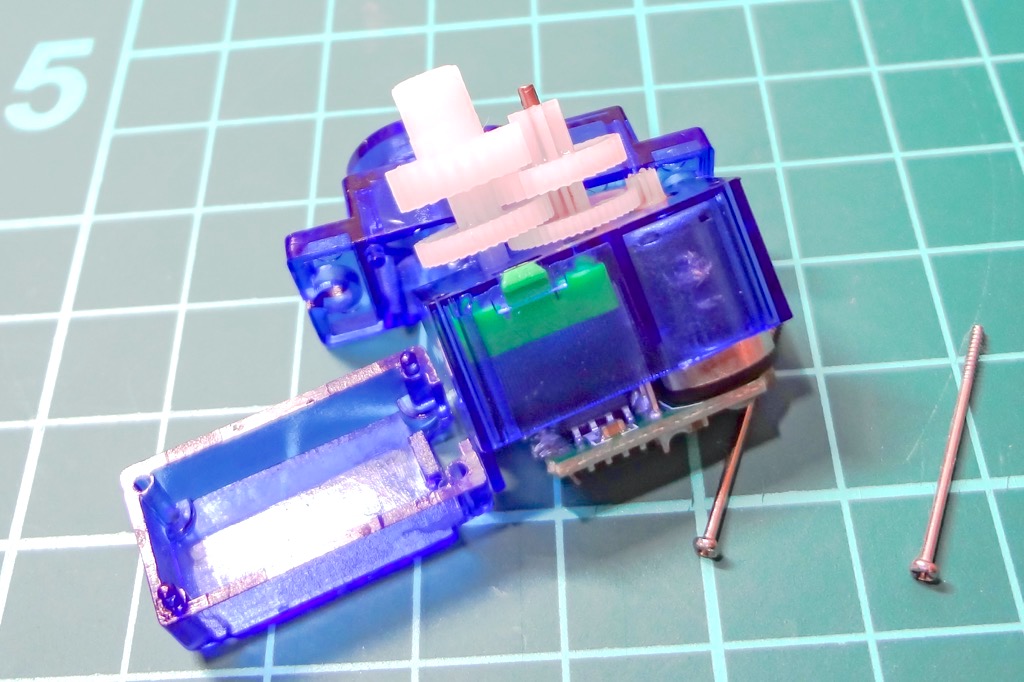
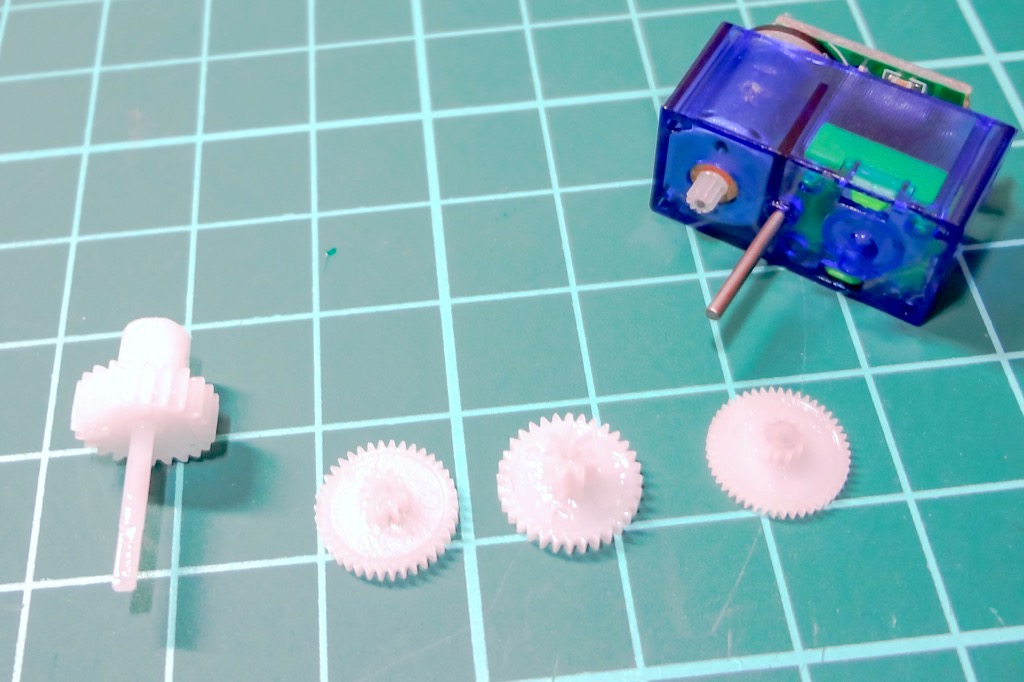
サーボ外側に出ているヘッド部分と、2段ギアが3つとモーターに付いた小さなピニオンギアの計5個のギア構成となっています。
2段ギアはほぼサイズが同じなので見分けがつきにくいですが、後術する組み立ての際に詳しく見ていきます。
まずギアを取り外した状態でサーボに通電して(Arduinoやサーボテスター等を使い動かして下さい)モーターが動けばギアの破損かストッパーの位置がズレた(破損も)ことが原因となります。

サーボモーターは基本的にArduinoなどマイコンボードに接続し制御して動かしますが、テスト動作や今回のような修理などではサーボテスターがあると非常に便利となります。
サーボに通電時、モーターが動くようであればギアをもう一度組み直せば正常に動作するようになる場合があります。
一番上のヘッド部分のギア底面にはストッパーが付いています。(切り取られているタイプのものもありました)
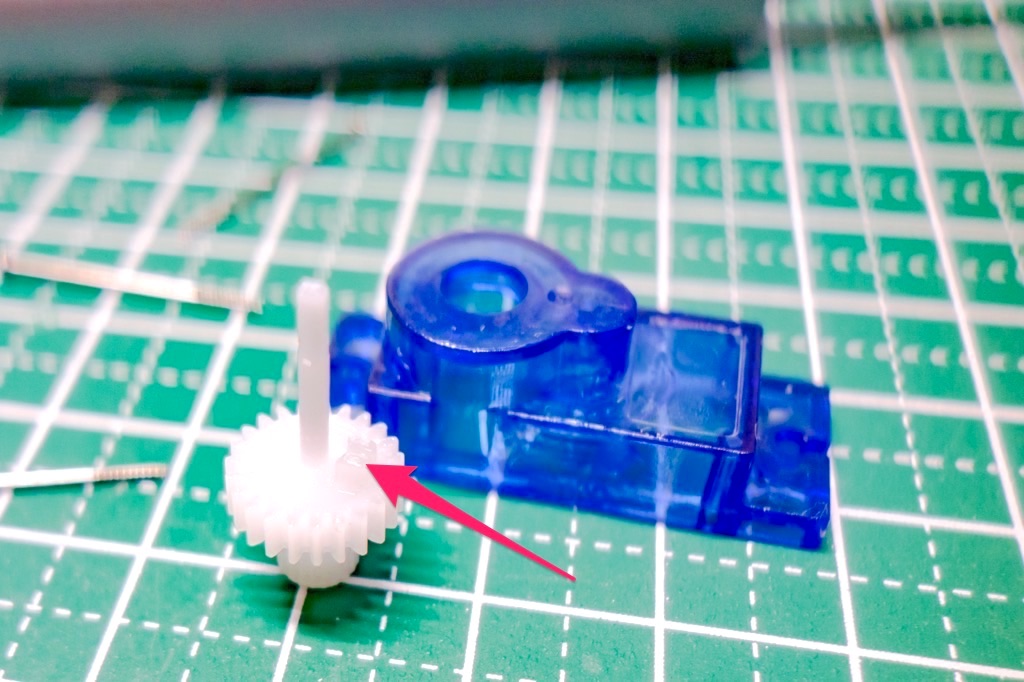
このストッパーにより可動域を制限しているのですが、高負荷によりこのストッパーが折れたり他のギアを破損させている場合があります。
また、この部分にテンションがかかりすぎてギアの軸が曲がったりする場合もあります。
基本的にこのストッパーはなくても動作するので、ストッパー部分の破損であればかけた異物を除去してギアを組み直せば正常に動作する場合があります。
また、ギアの軸が曲がったりその他ギア自体の破損があればギアの交換で直せます。
SG90用のギアは海外サイトなどで個別で売られているのを見たことがありますが、他の壊れたSG90のギアを移植してあげる方が効率はいいと思います!
断線した配線の修復
上記ギアを外した状態で通電してモーターが動かなければ、ケーブルの断線の疑いがあります。
これまで私が遭遇したSG90の故障原因の大半はこのケーブル断線によるものでした。
さらに分解していきます。
下蓋を外しケーブルの断線がないか確認します。
制御回路が付いた基盤は非常に小さく、ケーブルをはんだ付けしているランド部分も小さいのでこの部分の断線は結構起こります。
断線が確認できたらケーブルのはんだ付けで直せます。
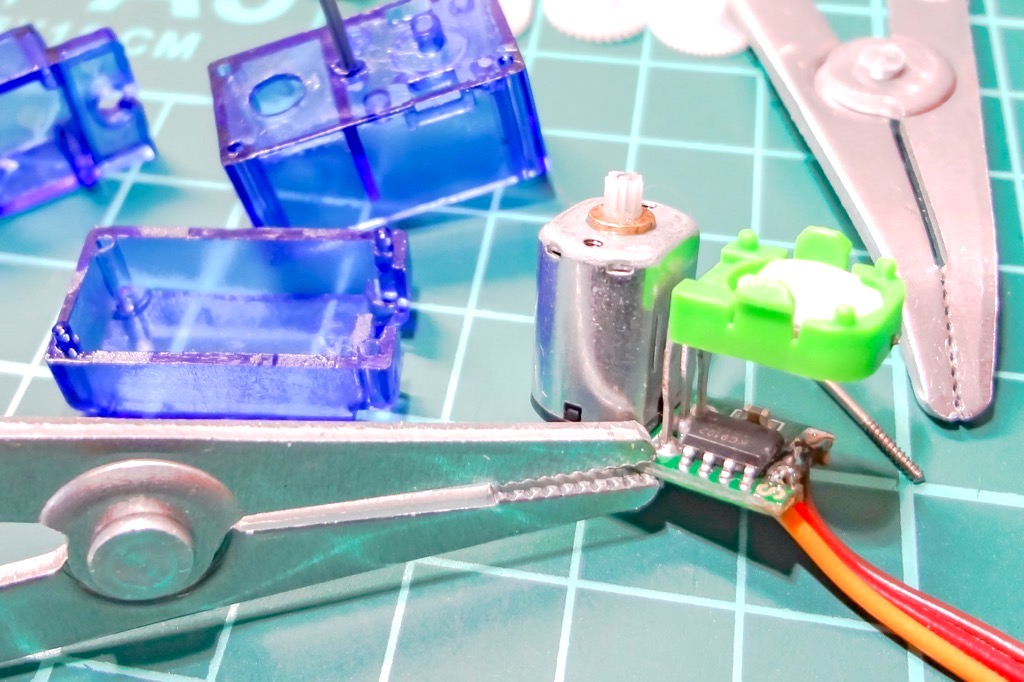
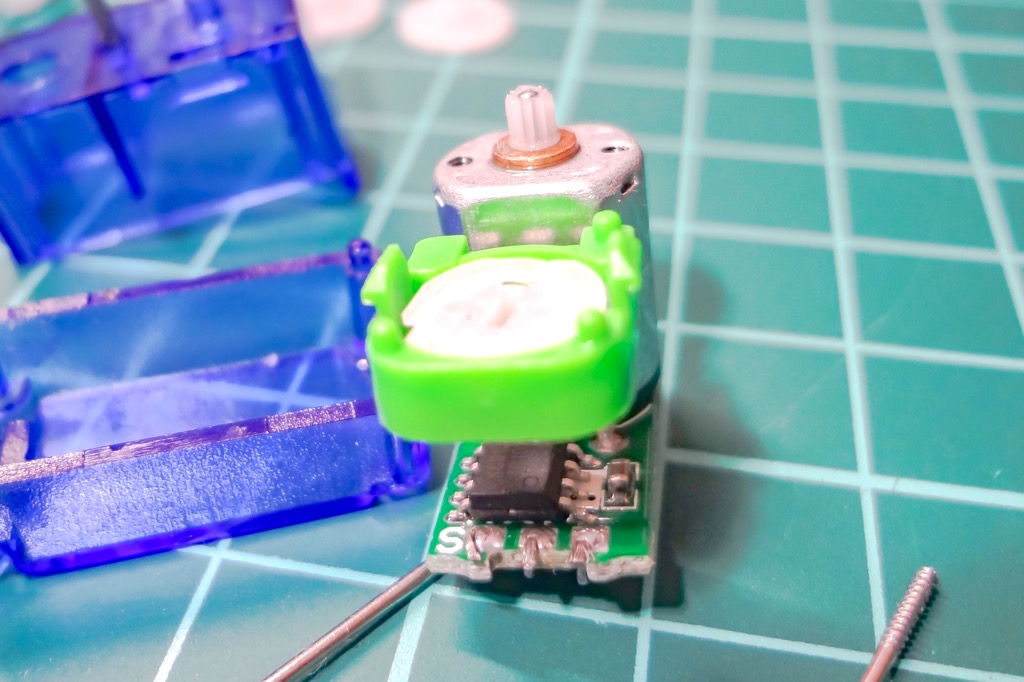
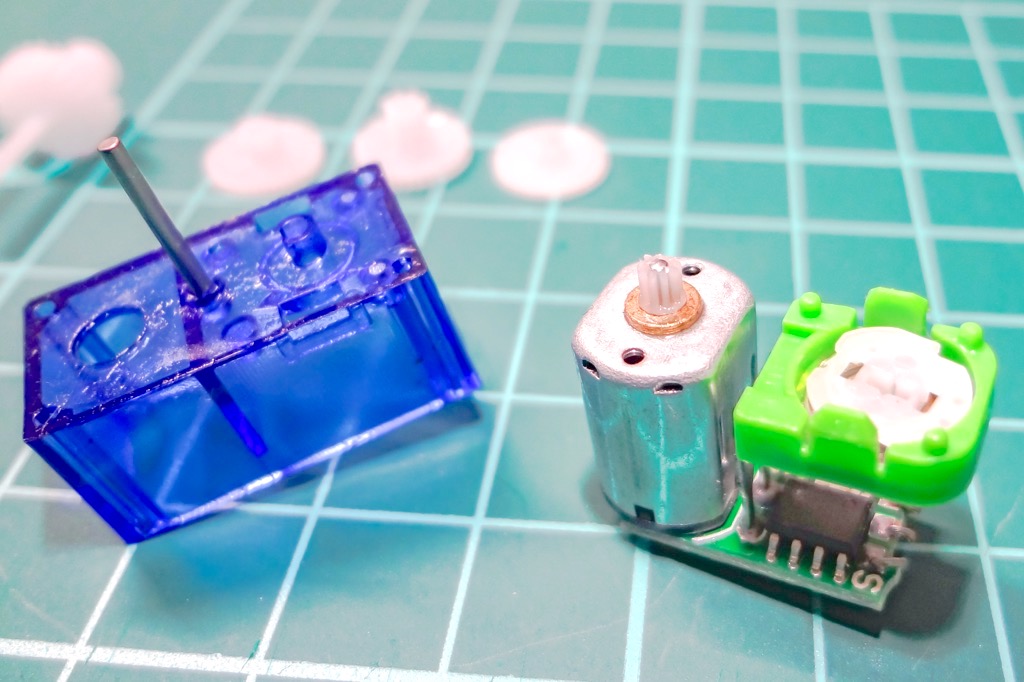
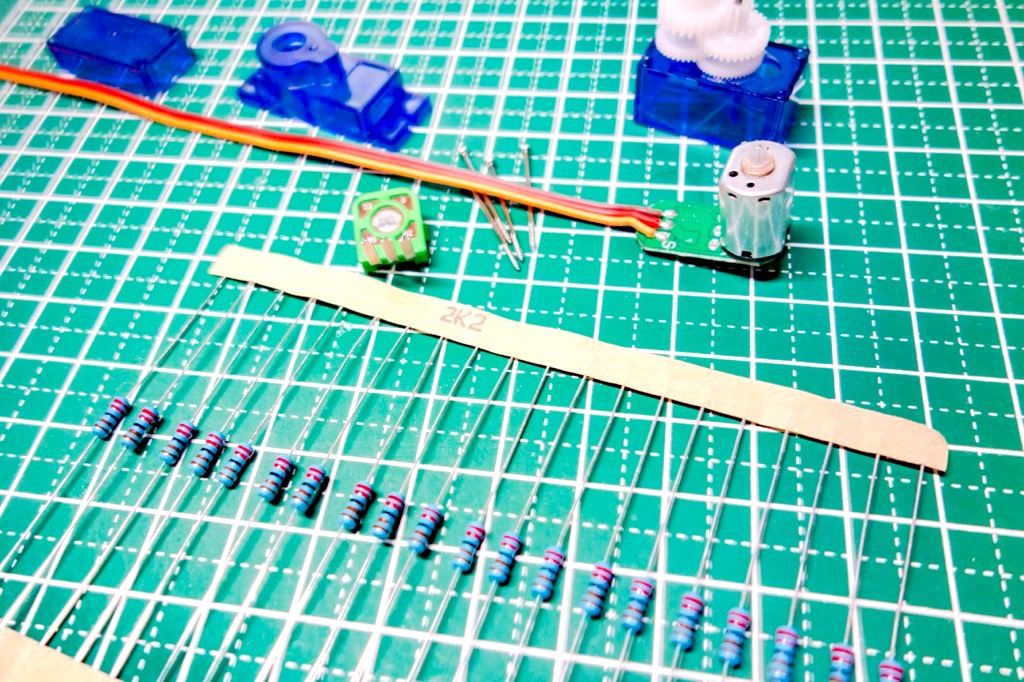
ここでサーボの基本構造を簡単にご紹介しておきます。
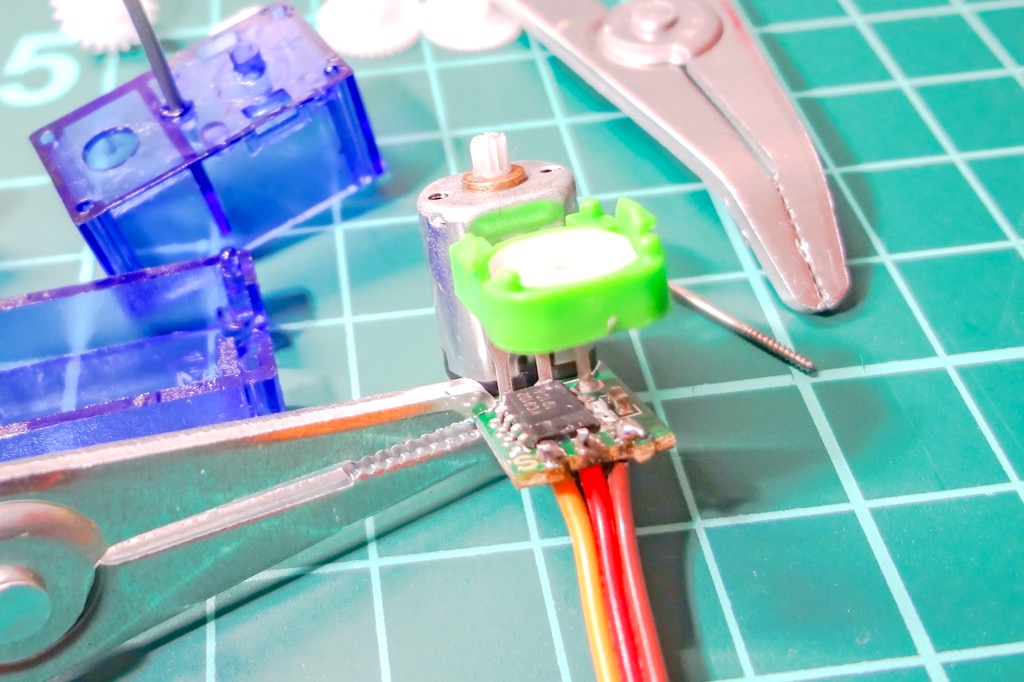
サーボモーターは回転させるDCモーターとギアの回転に連動しその位置を検出するポテンショメーター、そしてポテンショメーターからの位置を確認しDCモーターを指定角度まで動かすフィードバック制御を行う制御回路の3構成となっています。

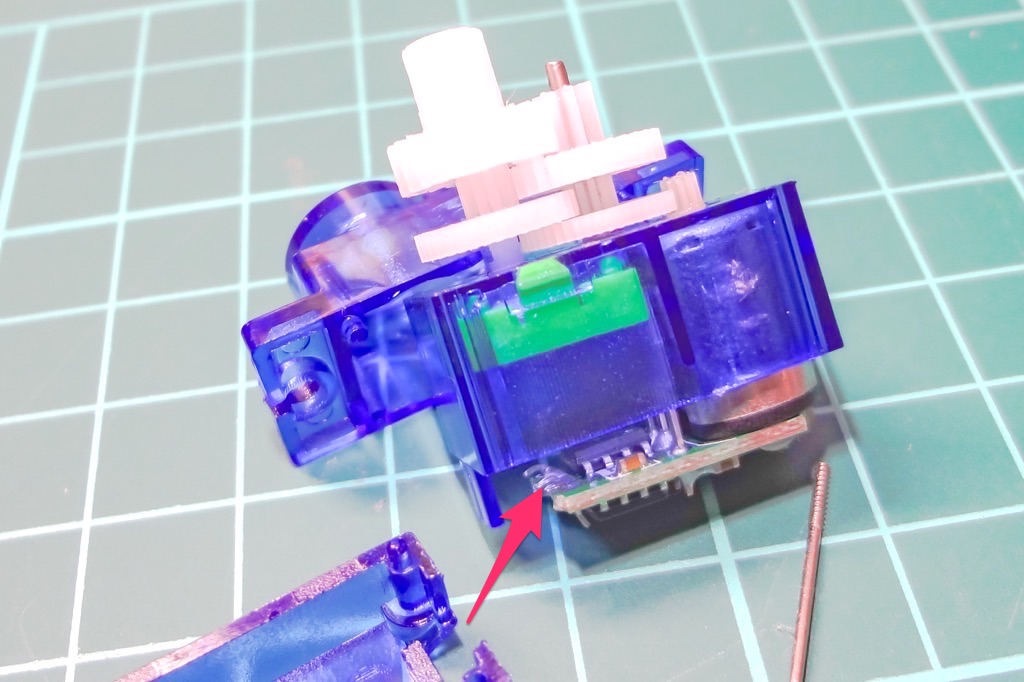
SG90の内部に取り付けられているポテンショメーターは、上写真のように制御基板に直接付けられているタイプのものと分離しているタイプのものがあります。
今回修理している互換SG90サーボモーターは、ポテンショメーターが制御基板に直接取り付けられているタイプのものです。
Tower Pro製のSG90では確かポテンショメーターが分離されている形状だったと思います。
取り付け方法の違いだけなので修理作業自体は特に変わりはありません。

制御基板にポテンショメーターが直接取り付けられたタイプのものでは、取り外した方が作業がしやすくなります。
ポテンショメーターの横にある突起部分が中蓋にはめ込まれているので、ピンセット等でこの部分を外し押し出す感じで取り出します。

基盤自体が小さいのではんだ作業が少し面倒ですが、はんだ吸い取り線などを使い断線したケーブルの銅線を除去すればスルーホールとなっているのが確認できます。

あとはケーブルを付け直せばいいだけです!
基盤にはS(シグナル)の刻印があると思いますが、こちらが信号線(オレンジケーブル)となり順に赤色ケーブル(5V)・茶色ケーブル(GND)という接続順となります。
ケーブルを付け直し通電してモーターが回転すればあとはギアを戻せば復活しますが、通電時にモーターが動かないようであれば制御回路の破損やDCモーター内部のコイルの断線が原因となるので修復は難しくなります。
SG90のギア構成
以上、ギアの破損による交換やケーブル断線による付け直しにより通電時モーターが回転するようになれば、あとはギアを戻して完了となります。
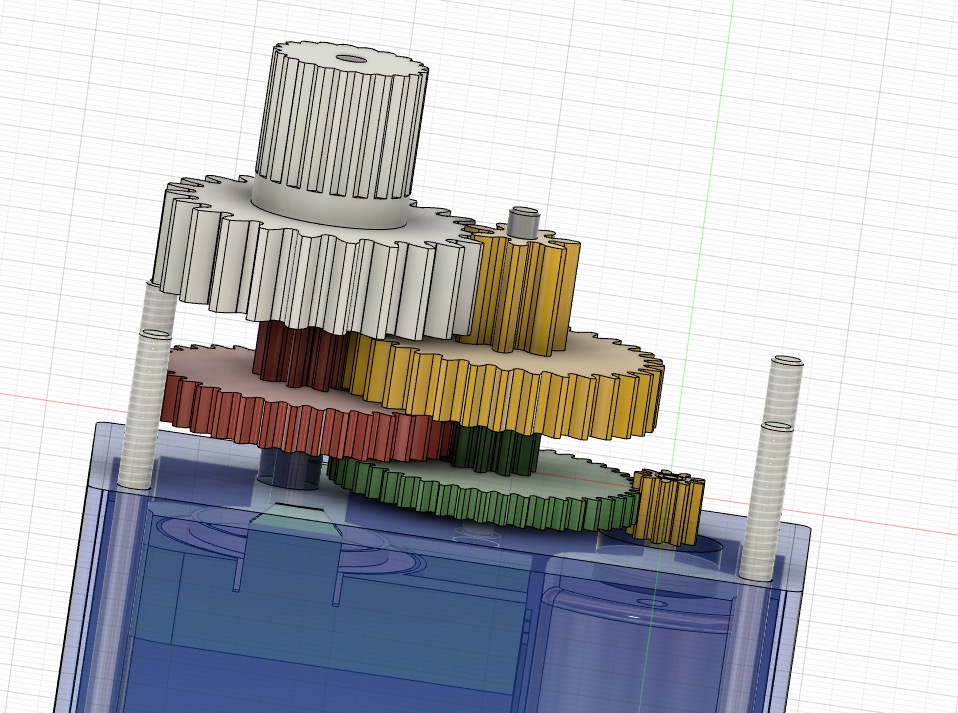
3枚の2段ギアはサイズも歯数も見た目では判別しにくいのですが、取り付け手順をご紹介しておきます。
SG90のギア構成はこちらの記事で詳しくご紹介しているので興味ある方は見て下さい!
https://youtu.be/jEJH0CgXnuw
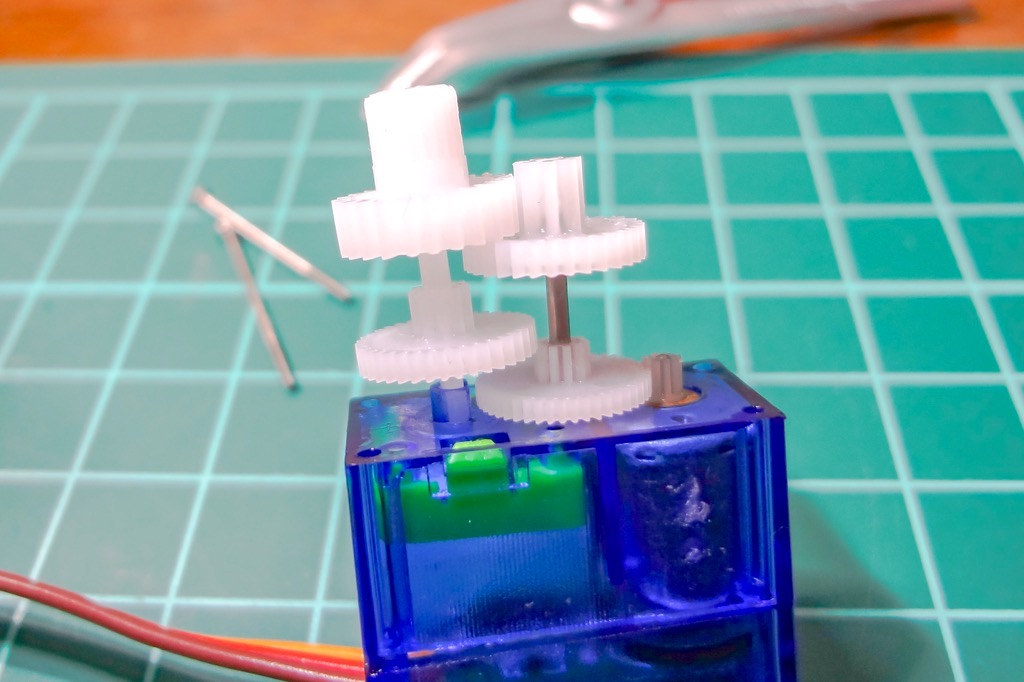
まず、2段目のギアが一番小さなものを金属シャフトに差し込みます。
次に2段目のギアが一番大きなものをその上に挿し込んでおき、残りのギアはヘッド部分のシャフトの下に配置しておきます。
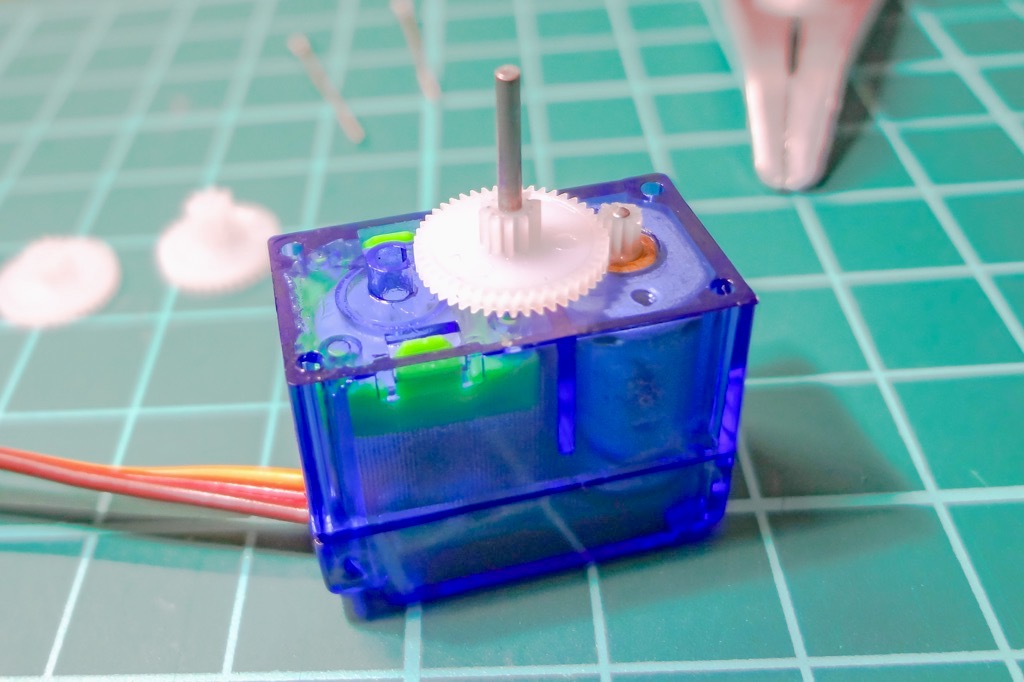
シャフト部分を穴に差し込み、このように互い違いになるように配置して上蓋を固定して完了です。
減速ギアなのでこの状態では手で回しても上手く回せないので、上蓋を取り付けもう1度サーボテスター等で回転がうまくいくか動作確認しておきます。
以上で修理完了です!
その他 SG90サーボモーターについて
SG90サーボモータは、電子工作用途でよく使っているサーボモーターでこれまでいろいろとご紹介してきました。
今回確認した内部構成が分かれば、連続回転タイプ(360°サーボ)に改造する事もできます。

また製作物で使う場合などでオリジナル形状のサーボホーンが作れれば便利となります。

興味ある方は上記記事も参考にして下さい!
最後に!

SG90は電子工作用途で便利に使えるサーボモーターとなりますが、急に動作しなくなるといったことがよく起こります。
安価なサーボモーターなので新しいものに交換してもいいのですが、内部の構造が分かると今回ご紹介した方法により比較的簡単に直すことが出来ます。
これまで何度も動かなくなったSG90を修理してきましたが、大抵の場合はケーブル断線によるものが多い印象です。
そしてギアの交換で直せる場合も結構あるので、壊れたSG90をバラしギアだけ手元に置いておくのもいいかと思います。
安価なサーボモーターなので故障したら新しいものに取り替えてもいいのですが、冒頭でご紹介したような4足歩行ロボットなどでは多くのサーボを使うので、自分で修理できれば便利となりますね!


 ESP32(ESP-WROOM-32)への書き込み用USB-シリアル変換チップにCH340Kを使ってみる。Mac環境ではUSBシリアルを認識してくれない!←解決しました
ESP32(ESP-WROOM-32)への書き込み用USB-シリアル変換チップにCH340Kを使ってみる。Mac環境ではUSBシリアルを認識してくれない!←解決しました  【自作基板 / 自作キーボード】Pro Micro互換のRP2040ボード(Micro Pico)の製作。Pro Microを使った既存キーボードに入れ替えてRP2040化してみる!
【自作基板 / 自作キーボード】Pro Micro互換のRP2040ボード(Micro Pico)の製作。Pro Microを使った既存キーボードに入れ替えてRP2040化してみる!  【自作基板 / 電子工作 】TPS6300xを使った昇降圧DC-DCコンバータ評価ボードを製作してみました!
【自作基板 / 電子工作 】TPS6300xを使った昇降圧DC-DCコンバータ評価ボードを製作してみました!  【電子工作 / PCB】AVRプログラマ USBaspを自分仕様にアレンジして自作ボードを製作してみました!
【電子工作 / PCB】AVRプログラマ USBaspを自分仕様にアレンジして自作ボードを製作してみました!  【電子工作 / PCB】ブレッドボード・ユニバーサル基板で便利に使えるType-Cコネクタ変換基板(DIP化基板)を自作してみました!
【電子工作 / PCB】ブレッドボード・ユニバーサル基板で便利に使えるType-Cコネクタ変換基板(DIP化基板)を自作してみました!  【KiCad / PCB】ベタGNDのハッチングパターンを試してみました!
【KiCad / PCB】ベタGNDのハッチングパターンを試してみました!  【壊れた?Arduinoボードの修理方法まとめ】ATmega328Pチップの交換、ブートローダーやATmega16U2ファームウェアの書き換えにより復活できる場合があります!
【壊れた?Arduinoボードの修理方法まとめ】ATmega328Pチップの交換、ブートローダーやATmega16U2ファームウェアの書き換えにより復活できる場合があります! 

コメントを残す