電子工作の強い味方?
サーボテスターというものを購入したのでご紹介します。
簡単にサーボモーターの動作チェックやニュートラル出しを行える便利なツールとなります。
Arduinoなどのマイコンボードが1台あればサーボモーターの動作チェックなどは数行のプログラムで確認することが出来ます。
しかし実際に作業している場面でこれをやろうと思うとおそらくデスク上はパーツや配線、電源など結構なカオス状態?で面倒な作業となります。
サーボへの配線や電源の接続、そしてマイコンへのプログラムの書き込みなど何かしらの作業途中でこれをやろうと思うと結構面倒で手間のかかる作業ですよね!
電源さえ用意できれば、このサーボテスター単体で動作チェックやニュートラル(ホームポジション)出しが行えるので、電子工作などやられている方は1台持っておくと大変便利になるかと思います。
先日、3関節の4脚ロボ(スパイダーくん)を製作したのですが(まだ製作途中です)、3Dプリンタで作ったパーツにサーボモーターを組み込みニュートラル出しや簡単な動作チェックをする際に非常に手間がかかり・・・
この投稿をInstagramで見る
そんな事からサーボテスターの存在を知りました。
上記スパイダーくんの小型版2号機、2関節4脚ロボットを新たに製作中なんですが、一度組み上げてしまうとあとはArduinoなどでのソフトウェアの調整となってきますが、そこに行き着くまでの動きのチェックや可動域の確認などこれは1台持っていると大変便利となります。
この投稿をInstagramで見る

目次
サーボテスターで作業効率アップ!
サーボテスターとは?
サーボモーターはPWM信号で動く動作角度を制御しています。
Arduinoなどを使いPWM信号を出力させれば指定角度までサーボモーターを動かすことが出来ます。
モーターを動かすための電源(Vcc・GND)とこのPWM信号線を接続すれば、あとはマイコンボードから数行のプログラムで動かすことが出来ます。
この基本的な機能をまとめたのがサーボテスターとなります。
使用するサーボモーターの動作電圧を電源端子につなげれば、あとは出力端子(Vcc・GND・信号線の3ピン端子)にサーボモーターを繋げればニュートラルの位置を確認したり、またポテンショメーターを回して任意の角度まで動かし動作チェックなどを行うことが出来ます。
Arduinoなどマイコンボードが1台あれば同様なことは簡単に行うことが出来るのであまり必要性は感じていなかったのですが・・・何かを製作中の場面では非常に役立ちます!
最近、電子工作用途で3Dプリンタを導入しこのような多関節ロボットを作ってみたのですが、動作チェック&確認に非常に時間をさかれサーボテスター導入に至りました。
サーボのニュートラルを出すのにArduinoに繋げてそのテスト用のスケッチを書いて個々のサーボに接続して動かし・・・そして動作チェックをするためにまた同じような作業をして・・・
簡単な作業なんですが、何かを製作中にこの作業が入ると非常に手間な作業となります。
Arduinoを使いこの作業をやるには新たにこんな配線を用意しプログラムも用意してと・・・意外と面倒!
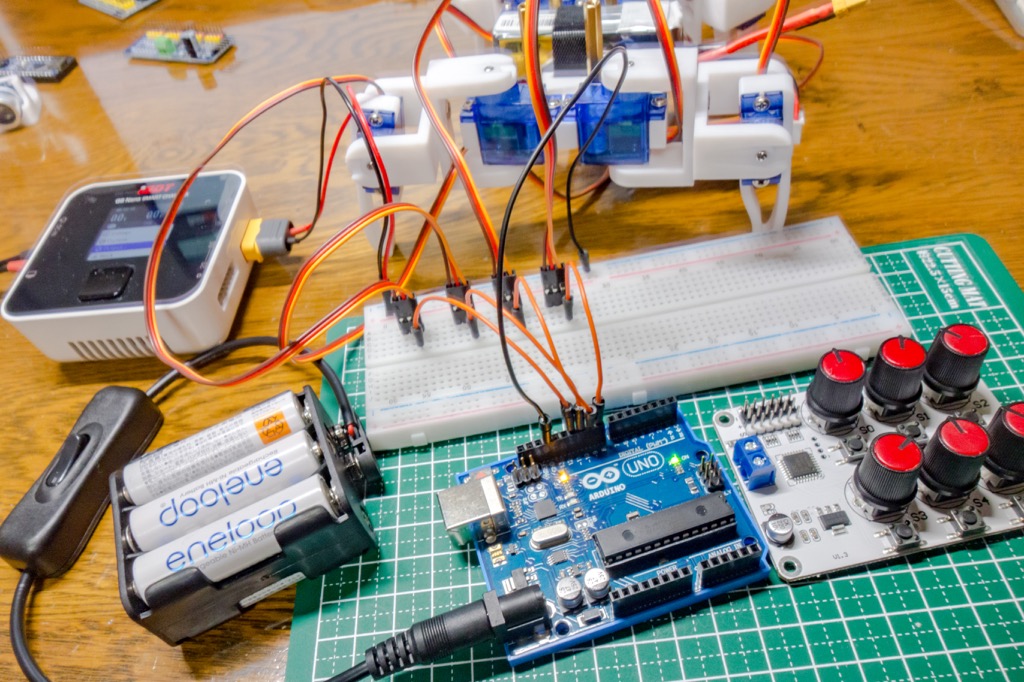
サーボテスターを使えばこんな感じで電源さえ用意できれば簡単に動作チェック等出来てしまいます。
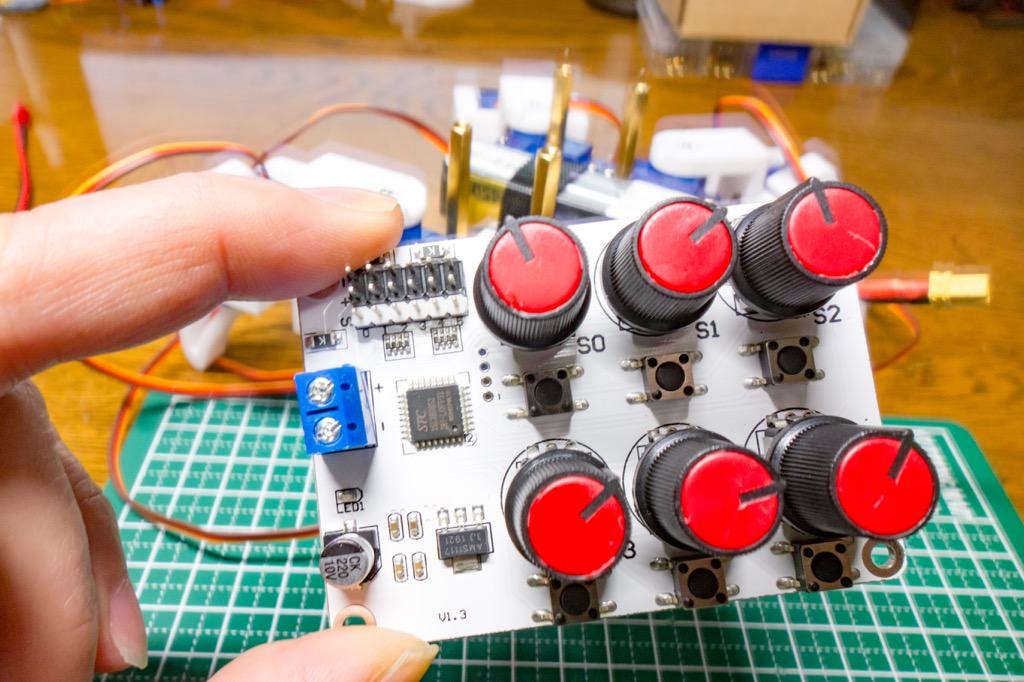
6CH対応 サーボテスター
サーボテスターは、1台接続出来るものから複数台同時に制御出来るものなど多数販売されています。
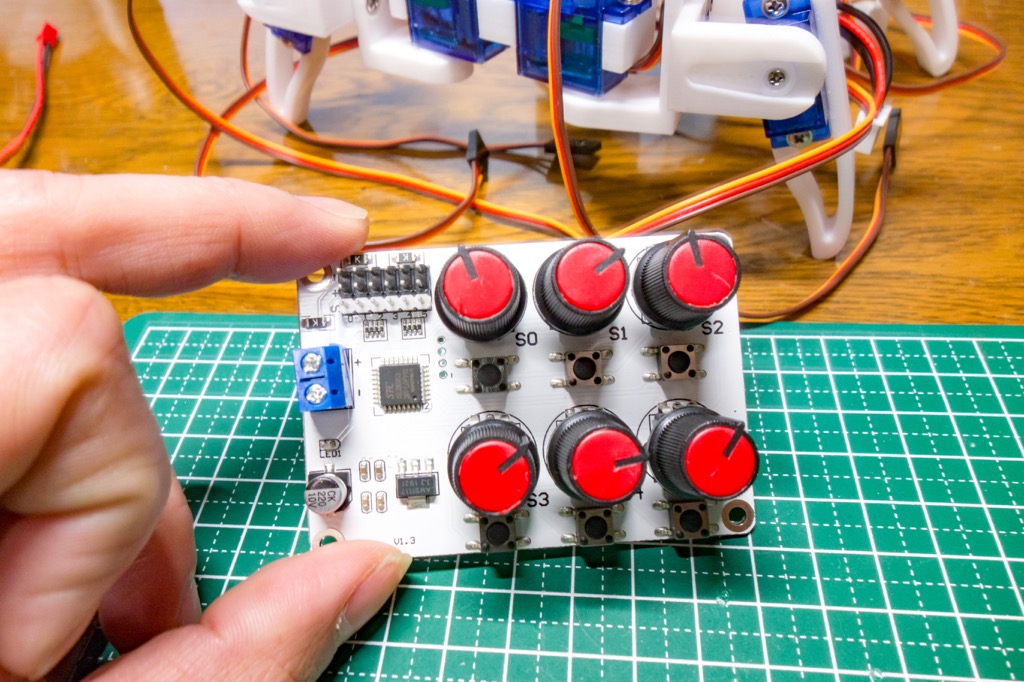
今回は6CHまで対応しているものを購入してみました。
安価で購入できるタイプのものとしてはCH数が多いものとなります。
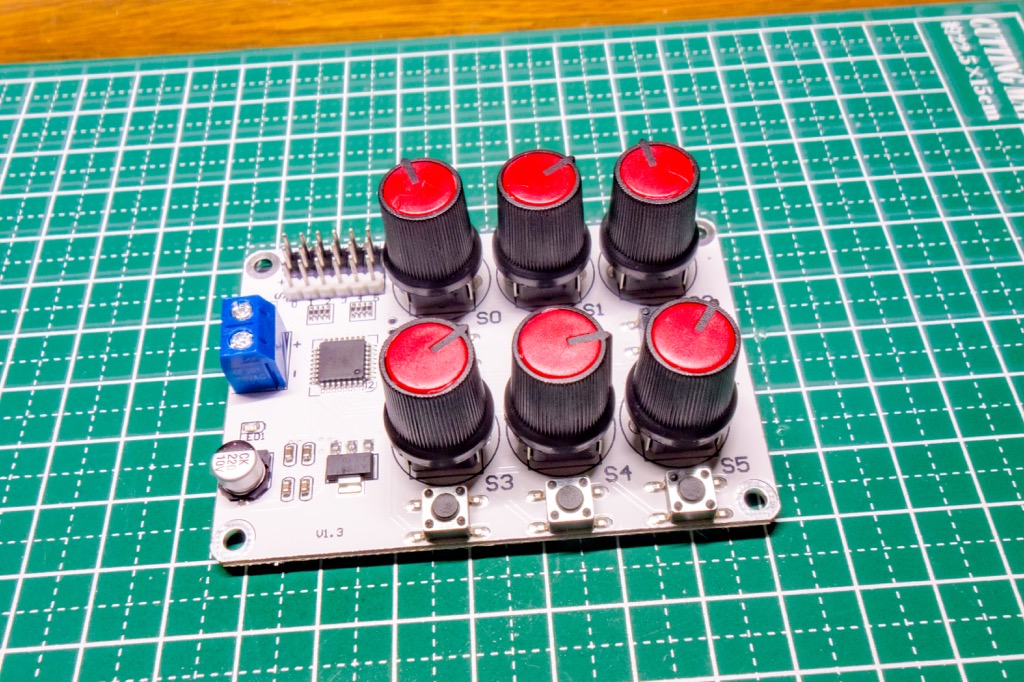
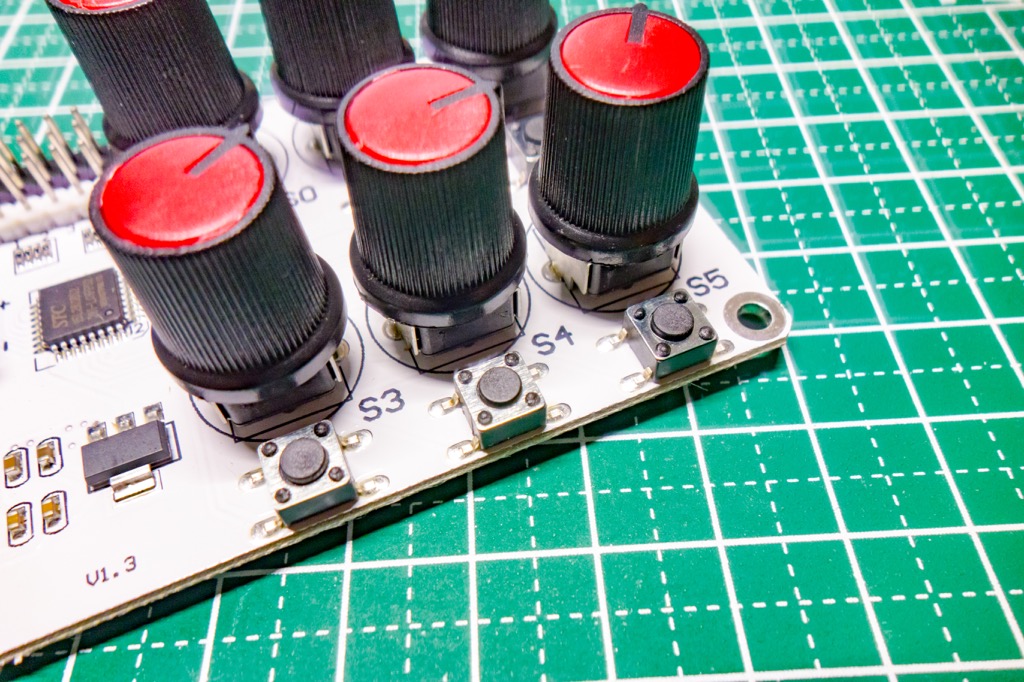
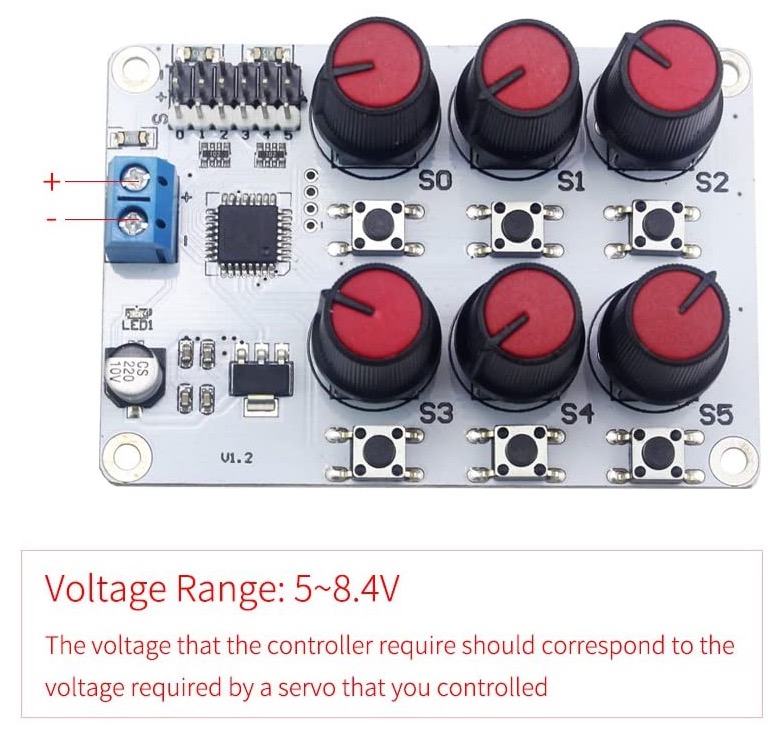
電源端子にサーボ接続用端子、6つのポテンショメーター、モード切替スイッチとシンプルな構成となっています。

動作電圧は5.0〜8.4Vとなっており、接続するサーボモーターに対応した電圧を加える形となります。
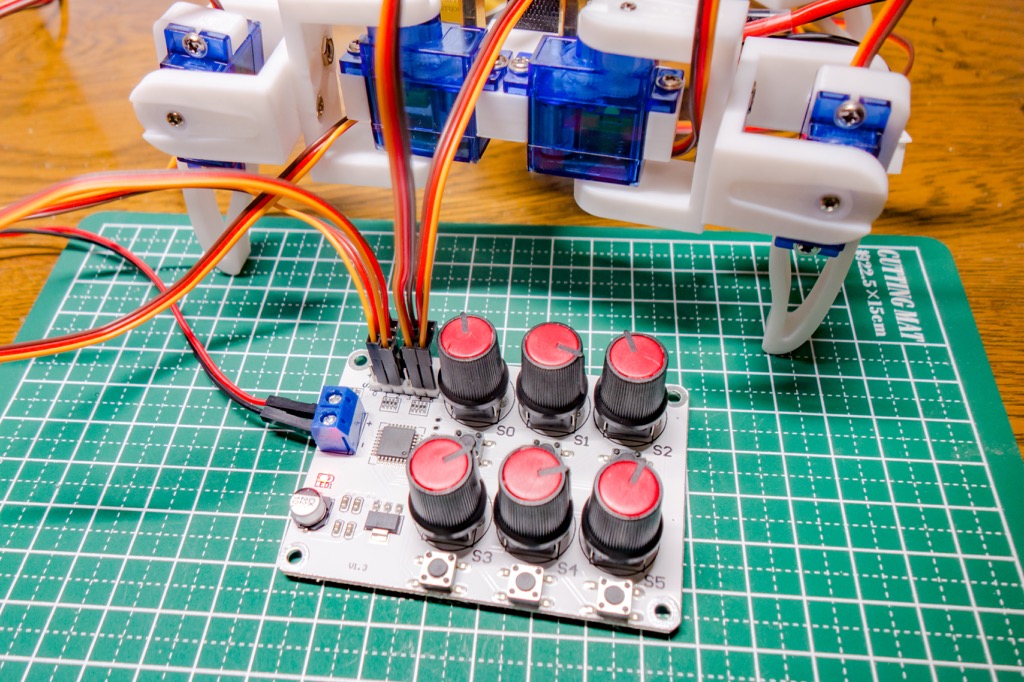
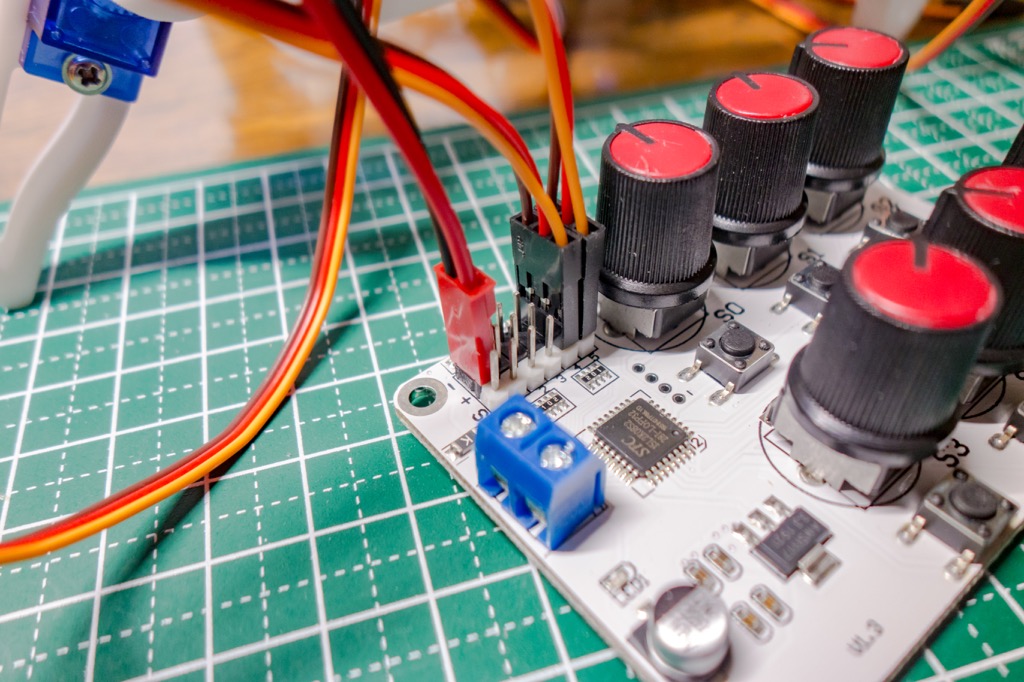
そしてサーボモーターの接続。

接続した番号に対応したポテンショメーターとスイッチを押して制御する形となります。
最大6台まで接続でき、それぞれ個別で制御することが出来ます。
操作自体は非常に簡単です。
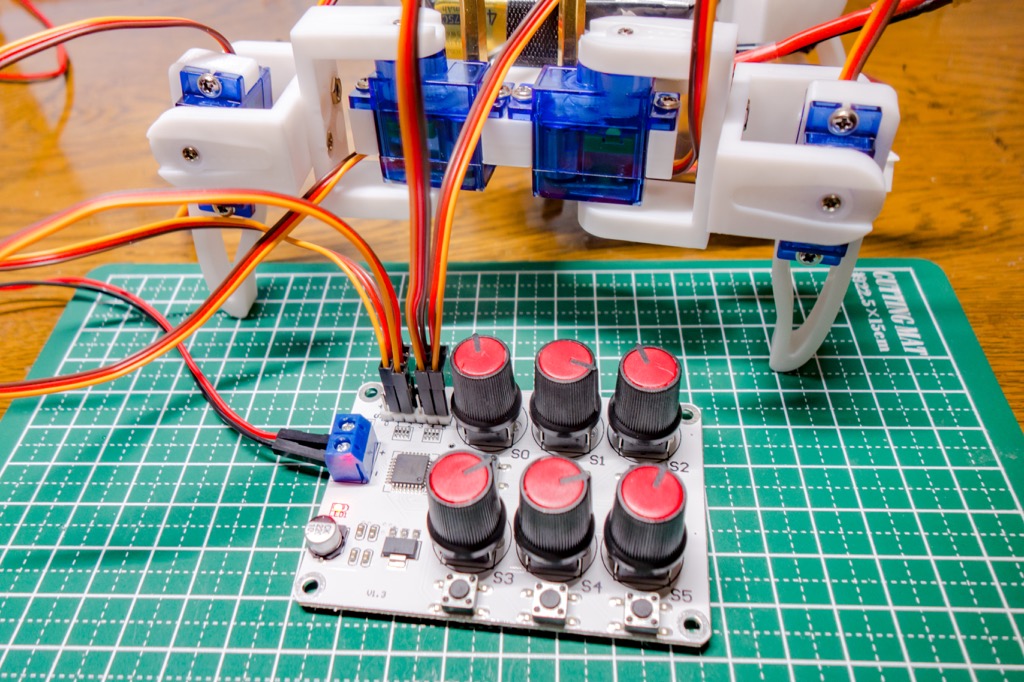
あとは接続しているサーボモーターに必要な電圧を電源端子から供給してあげるだけです。

サーボ端子0〜3番までの端子には過電流保護機能が備わっているようです。
また各サーボ端子の電源(Vcc・GND)は共通となっているので空いているポート、例えばこのように0番端子に電源を繋げて動かすことも出来ます。
1.25ピッチの3ピン端子(または2ピン)で接続できるので、このような電源用の端子を自作すればこちらの方が便利かもしれませんね。
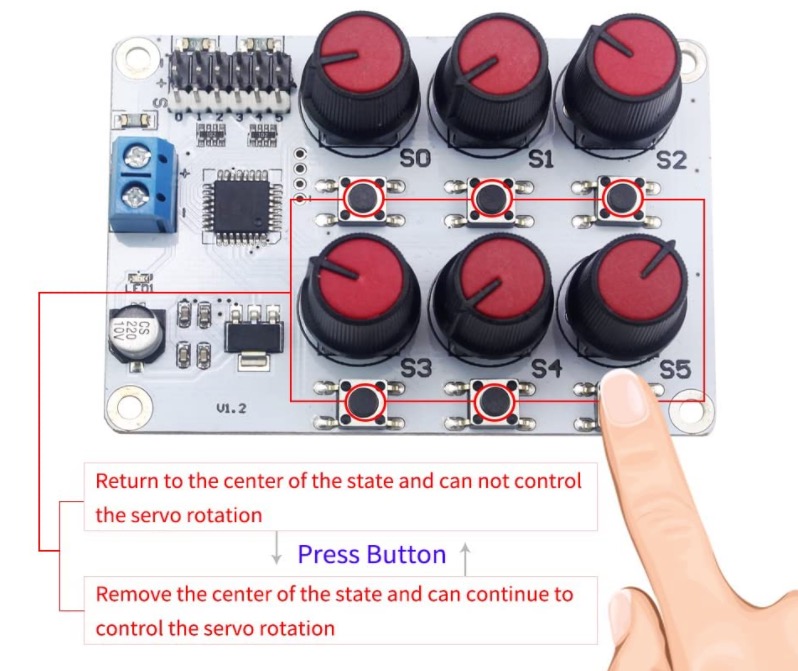
操作方法
操作方法は非常に簡単です。
モード変更用のスイッチを押すとサーボモーターがニュートラル(中心の位置)に動きます。
この時ポテンショメーターの動作は解除され、単純にニュートラル出しを行うことが出来ます。
そしてもう一度スイッチを押すとマニュアルモードに切り替わります。
ポテンショメーターを回して任意の角度までサーボモーターを動かすことが出来るので動作チェックなどで使えます。
この投稿をInstagramで見る
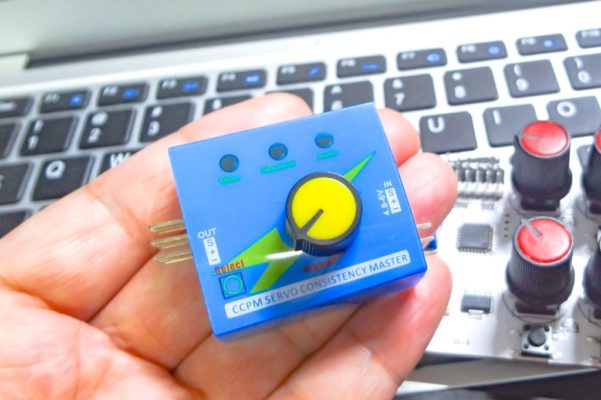
サーボテスターにはPWM信号のパルス幅を7セグLEDに表示出来るタイプのものもあるようです。
例えばこちらのサーボテスターですが、パスル幅も表示できるタイプのものとなり第一候補として考えていましたが接続できるサーボ数が4CHなのと、何より簡単な動作チェックやニュートラル出しをするというのがサーボテスターに求める機能であり、それ以上の機能はもうマイコンを繋いだ方が・・・ということで私は今回の6CHまで対応したサーボテスターを選択しました。

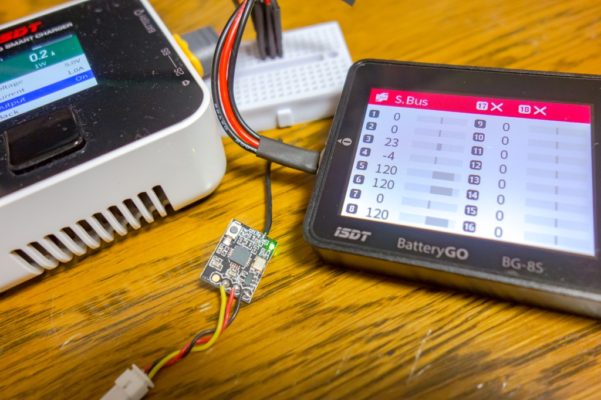
またリポバッテリーチェッカーにもサーボテスター機能が搭載された機種もあるようです。
私がドローン用途で使っているリポバッテリーチェッカーにも簡易的な機能が付いているのでサーボ1台だけならPWMパルスのチェックは行なえます。
サーボテスターは安価な価格で多種販売されています。
今回ご紹介したものは1例として、使用用途に合ったものを選ばれるのがいいかと思います。
【追記】サーボテスターの基本的な使い方をまとめました!

サーボテスターはこれ単体でPWM信号を出力できる機器となるため、サーボモーターのテスト以外にも使うことが出来ます。
例えばESCを接続しモーターの回転を制御するといった事にも使えます。
お問い合わせを頂いたことからサーボモーターの基本的な使い方について追記的にまとめてみました。
こちらの記事も参考にして下さい!

【追記】3CH対応の100円サーボテスターを試してみる!

海外サイトで100円ほどで入手出来る3CHサーボテスターを試してみました。
国内サイトのAmazonなどでも数百円程度で売られている小型サーボテスターですが、機能的には問題なく使えるようです!
https://youtu.be/j5QIuofhBc4
最後に!
今回ご紹介した6CHに対応したサーボテスターは、価格帯もだいたい2000円ほどで販売されています。
6CHまで対応したものはあまり出回っていないようで、安価なものとなるので単品サーボでの使用でも1台持っていると便利となります。
また、ESCを繋いでブラシレスモーターを動かす・・・なんていうドローン用途でも簡単に応用できそうですね!
あと見ての通り基盤がむき出しになっています。
サーボテスターは安価なものなのでダサいケースに入っているくらいならこのようなむき出しタイプの方が私は好きです。
最近3Dプリンタを導入したので好きな形状のケースとかも簡単に作れちゃいますしね!
そんな事で電子工作などで持っていると役立つサーボテスターのご紹介でした。
【追記】パルス幅を調べてみました!
Twitterでご指摘頂いたので少し追記しておきます。
うちにもありますー😃 ノブを端から端まで回すとパルス幅が750-2300usくらいまで変化するので、サーボ繋ぐ時は回し過ぎに注意っすね。ちなみにボタン押してセンターにすると1510usくらいが出てます。 https://t.co/643SLtuUO1 pic.twitter.com/HT6s5ivTPa
— 燃える小羊 (@burnsheep) January 12, 2021
今回テストで使ったSG90サーボモーターのデューティーサイクルはデータシート上、500~2400μsとなっています。
このサーボテスターのパルス幅を調べたところ、500~2500μsくらいの範囲で動いているようです。
ご指摘頂いたように使うサーボモーターによっては回し過ぎには注意が必要ですね!(まぁ、これくらいで壊れたことはないですが)
この投稿をInstagramで見る
またスイッチを押しニュートラル(中央)に移動させた際のパルス幅は1510μsとなっています。
SG90は上記のように500~2400μsとなっているのでセンターの位置では1450μsとなるわけなので、少しズレているのかな?
ズレているというよりは一般的な?サーボモーターの位置になってるのでしょうね!
調べてみるとRCサーボのニュートラルの位置ってサーボによって1500μsや1520μsなどいろいろあるようですね。
今回テストで使ったSG90のセンター1450μs→1510μsでは、角度にして約5.7°ズレる計算になりますが・・・
なるほど、なるほど。
動作確認用途ではこのあたりあまり意識しなくてもよさそうですが、今私が作っている4脚ロボットではサーボモーターのニュートラルの位置でサーボホーンを固定する構成なので、こういう正確に値を合わせたい場合はArduino側でプログラムを組んだ方がいいかもしれませんね。
といっても誤差レベルのズレですが・・・
 【自作基板 / JLCPCB】リポバッテリーを安全に使うためのブレッドボードDIP基板の製作!入力極性フリーに改良しました(V1.2)
【自作基板 / JLCPCB】リポバッテリーを安全に使うためのブレッドボードDIP基板の製作!入力極性フリーに改良しました(V1.2)  【電子工作 / PCB】静電容量タッチ式スイッチを使ったミニマクロパッドや名刺基板の製作を考えています!
【電子工作 / PCB】静電容量タッチ式スイッチを使ったミニマクロパッドや名刺基板の製作を考えています!  Arduinoの開発環境を構築する。Arduino IDEのインストール方法!
Arduinoの開発環境を構築する。Arduino IDEのインストール方法!  【電子工作 / PCB】ボタン電池(CR2032 / LIR2032)用ブレッドボード電源モジュール基板の製作!
【電子工作 / PCB】ボタン電池(CR2032 / LIR2032)用ブレッドボード電源モジュール基板の製作!  【Arduino】ATmega328P単体でスケッチを動かしてみる!その② USB-シリアル変換モジュールを使ってスケッチを書き込む!
【Arduino】ATmega328P単体でスケッチを動かしてみる!その② USB-シリアル変換モジュールを使ってスケッチを書き込む!  【Arduino入門編㉕】ステッピングモーターを動かしその基礎を理解する!(28BYJ-48 & ULN2003)
【Arduino入門編㉕】ステッピングモーターを動かしその基礎を理解する!(28BYJ-48 & ULN2003)  【電子工作 / PCB】自作キーボードでよく使われるRGB LED『SK6812 MINI−E』についての備忘録!
【電子工作 / PCB】自作キーボードでよく使われるRGB LED『SK6812 MINI−E』についての備忘録!  【電子工作 / 自作基板】4ポートのハブ機能が付いたUSB電源保護ボード『4Port USB Power Toggle』の製作!
【電子工作 / 自作基板】4ポートのハブ機能が付いたUSB電源保護ボード『4Port USB Power Toggle』の製作! 

コメントを残す