電子工作ってほんと楽しいですよね!
そして3Dプリンタがあると思いついたら何でも作れる、ほんと便利な道具です!
電子工作に3Dプリンタ、いい組み合わせですね。
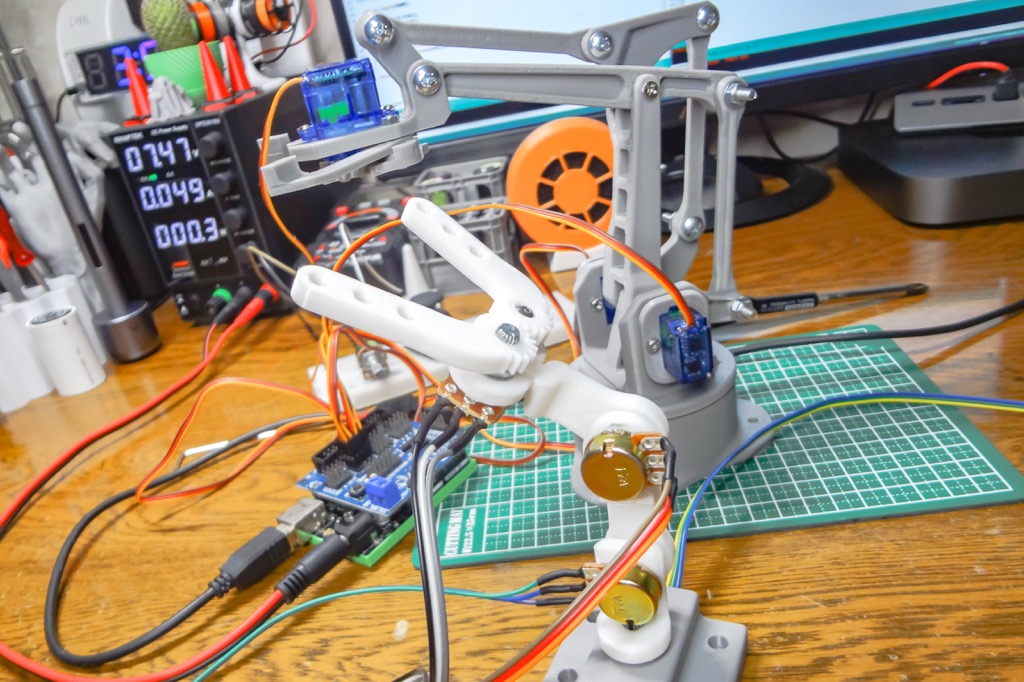
そんな事で今回はロボットアームを操作するための小アーム(リーダーアーム)を3Dプリントパーツで作ってみました。
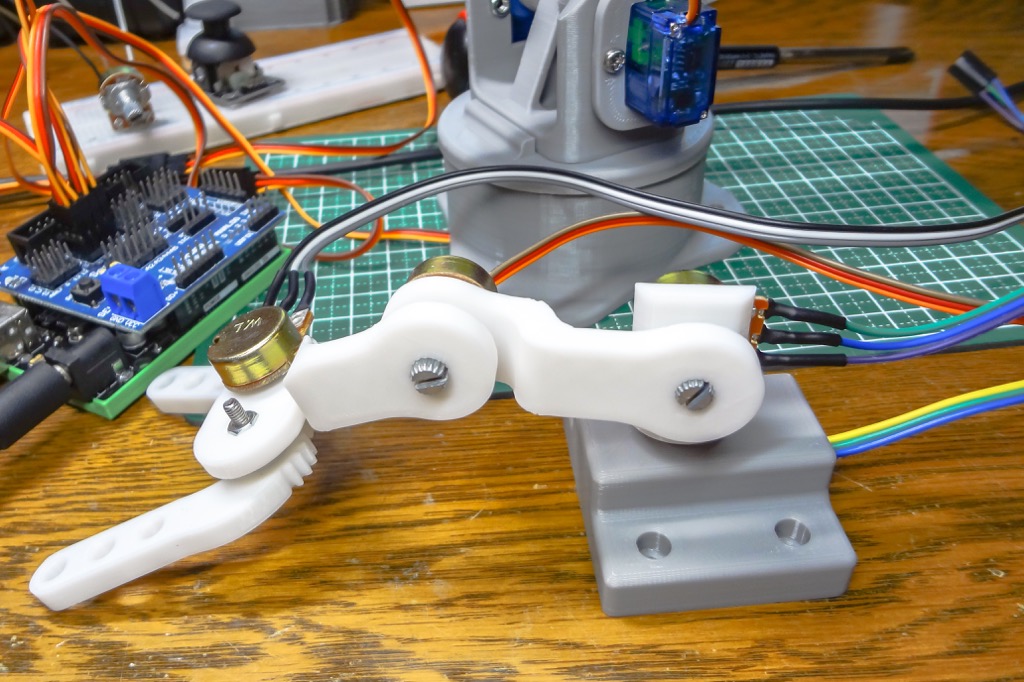
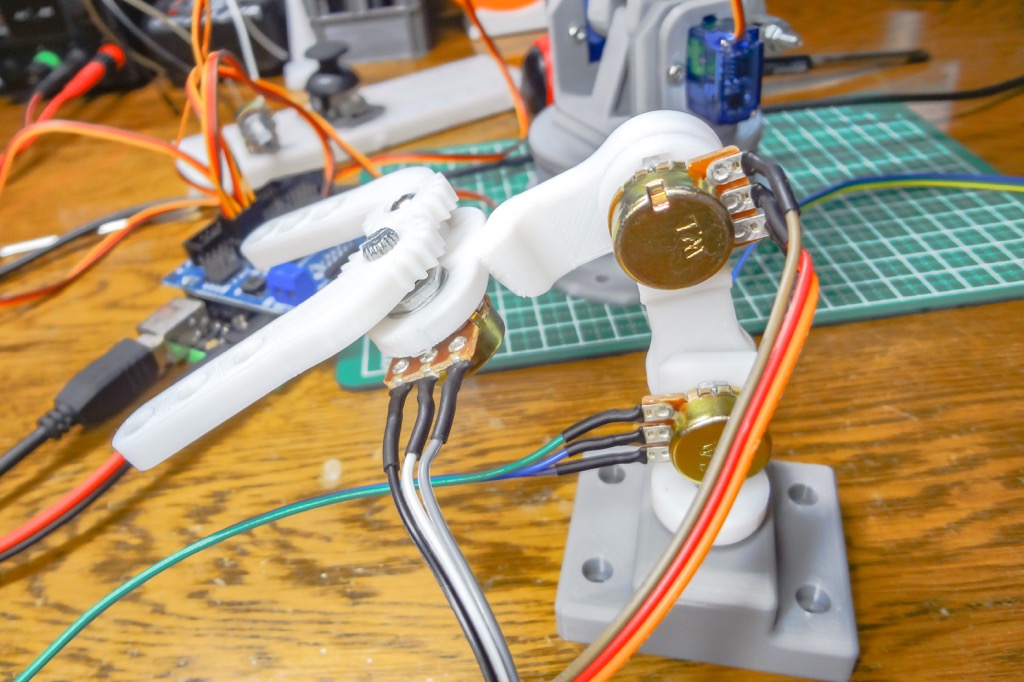
アームの関節部分にポテンショメーターを取り付け、そのアナログ値を取得することにより現在のポジションを計測し親となるロボットアームを同じ動きで操作するというガイドアームとなります。
電子工作用途で楽しめ個人的にはなかなかいい出来じゃないかと思っています。
ロボットアームを操作するリーダーアームの製作!
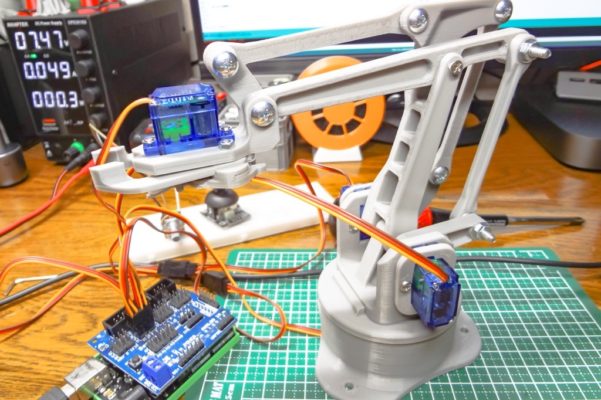
先日、電子工作のお遊びとしてサーボモーターで動かすロボットアームを作りました。
電子工作という趣味をやられている方なら1度は作ってみたいと思うのがロボットアームではないでしょうか?
アーム本体の回転に1つ、関節部分の可動に2つ、そして先端のハンドの開閉に1つの計4つのサーボモーターで制御する簡単なロボットアームとなります。
サーボモーターで細かい動作をさせるのは結構難しく、ジョイスティックコントローラーなんかも作ってみました。
ジョイスティックでロボットアームを自在に動かせると、これが非常に楽しく・・・結局のところ自分が作ったものって愛着もあってどれも楽しいのですけどね!
https://youtu.be/bYO7C2kw9Ho

今回はさらに楽しくロボットアームを操作するために、リーダーアーム(小アーム)なるものを作ってみました。
この小さいアームを動かし同様の動作を親アームとなるロボットアームにさせようというものとなります。
モデリングはこんな感じ!
アームの各関節部分に取り付けたポテンショメーターからそのアナログ値を取得し、ArduinoやRaspberry Piなどのマイコンボードで現在のアームのポジションを計測して親となるロボットアームを操作出来たら楽しいだろう・・・そんな所から作り始めました。
CAD上で動かした時のようにヌルヌルと3Dプリントパーツでも動いてくれたらいいのですが・・・
この投稿をInstagramで見る
何度か調整しいい出来になりました!
実物でもこれだけヌルヌルと滑らかに動いてくれるとガイドアームとしては完璧です!
この投稿をInstagramで見る
そして各関節に取り付けたポテンショメーターをArduinoに接続し、そのアナログ値を取得してみました。
非常に綺麗にポジションを取ることができていますね!
この投稿をInstagramで見る
実際にロボットアームと接続し操作してみました。
まだ滑らかな動きとまではいってませんが、1歩目としてはいい動きをしてくれています。
アームの関節部分を可動させるサーボモーターの可動域とポテンショメーターのそれとをもう少し調整してあげる必要がありそうです。
あとはプログラムの話となるので徐々に修正&調整していけば、もっといい感じに動いてくれるはずです。
https://youtu.be/fZkAGrhlAks
今回動かしているロボットアームは、SG90というマイクロサーボで動かしているので細かい動きをさせるのはなかなか難しいようですね!
3Dプリントパーツで作っているのでパーツ同士の結合部分での摩擦はどうしても大きくなります。
そのため動き出しのトルク不足から関節部分を可動させる2つのサーボモーターはSG90の高トルク版となるMG90に変えています。
動き出しのトルクが大きいのはいいのですが、リーダーアームからの細かい動きによる角度指定は難しくなるようです!
今後、ステッピングモーターを使い正確に細かい動きも出来るようなものも考えていますが・・・
ちょっと話がそれていきましたね。
今回はロボットアームのガイドとなるリーダーアームのご紹介です。
ポテンショメーターを取り付けアナログ値を取得するという単純な構造のとなりますが、電子工作用途で使って楽しんで頂けたらありがたいです。

STLデータはThingiverseから無料でダウンロードする事が出来るので、興味ある方は作ってみて下さい。
参考 Leader Arm(3 axes+Hand)Thingiverse
 【KiCad / PCB】ベタGNDのハッチングパターンを試してみました!
【KiCad / PCB】ベタGNDのハッチングパターンを試してみました!  【自作基板 / 電子工作】ブレッドボードの電源レーンに直接挿し込んで使えるミニサイズの電源ボードを製作してみました!
【自作基板 / 電子工作】ブレッドボードの電源レーンに直接挿し込んで使えるミニサイズの電源ボードを製作してみました!  【Arduino】新しいATtiny(tinyAVR 0/1/2シリーズ)やmegaAVR 0シリーズなどで採用されたUPDIによる書き込み方法! Arduino IDEで環境を構築する!
【Arduino】新しいATtiny(tinyAVR 0/1/2シリーズ)やmegaAVR 0シリーズなどで採用されたUPDIによる書き込み方法! Arduino IDEで環境を構築する!  Arduinoをリセットするいくつかの方法!【RESET端子/ソフトウェアリセット/ウォッチドッグタイマー(WDT)】
Arduinoをリセットするいくつかの方法!【RESET端子/ソフトウェアリセット/ウォッチドッグタイマー(WDT)】  【JLCPCB】USB PDトリガーチップ『CH224A / CH224Q』自作評価ボードの製作!
【JLCPCB】USB PDトリガーチップ『CH224A / CH224Q』自作評価ボードの製作!  【電子工作 / PCB】ファミコンのコントローラーを使ったUSBゲームパッド化基板を作っています! まずはPro Micro(Arduino Leonardo)を使ったブレッドボードでのテストから!
【電子工作 / PCB】ファミコンのコントローラーを使ったUSBゲームパッド化基板を作っています! まずはPro Micro(Arduino Leonardo)を使ったブレッドボードでのテストから!  【電子工作】抵抗やダイオードなどの足(リード線)を綺麗に折り曲げる事が出来るリードベンダーがあるとハンダ作業に便利に使えます![サンハヤト リードベンダー RB-5]
【電子工作】抵抗やダイオードなどの足(リード線)を綺麗に折り曲げる事が出来るリードベンダーがあるとハンダ作業に便利に使えます![サンハヤト リードベンダー RB-5]  ATtiny2313/ATtiny4313をArduinoとして動かしてみる!
ATtiny2313/ATtiny4313をArduinoとして動かしてみる! 

コメントを残す