

BETAFPVのPro Seriesに属する2セルWhoop『Beta75 Pro2』、お気に入りで最近こればかり飛ばしていました。
X SeriesのBeta75XやBeta85Xなど重量機にあるズンッとした飛びとは違い、また最近仲間になった軽量機Mobula7のような非常に軽い飛びとも違う、ちょうどその中間ぐらいの飛びでしょうか。(感覚的ですいません)



2セルWhoopとしては軽量機という位置付けになるかと思いますが、軽すぎず機体がブレにくいので私のような初心者には非常に操縦しやすく大変気に入っています。
このBeta75 Pro2くんには標準で08028(12000KV)モーターが使われています。

そしてこのBeta75 Pro2に限ったことではないのですが、Mobula7やTRASHCANでも同様に飛行後非常にモーターが熱くなります。
Mobula7ではそれが顕著で、飛行直後手で触れないくらいモーターがアツアツ状態に!
使用するFCやファームウェア等で多少変わってくるかと思いますが、どうやら75mmサイズのフレームで08系のモーターを使うとモーターがかなり熱くなるのはお決まり?のようですね!
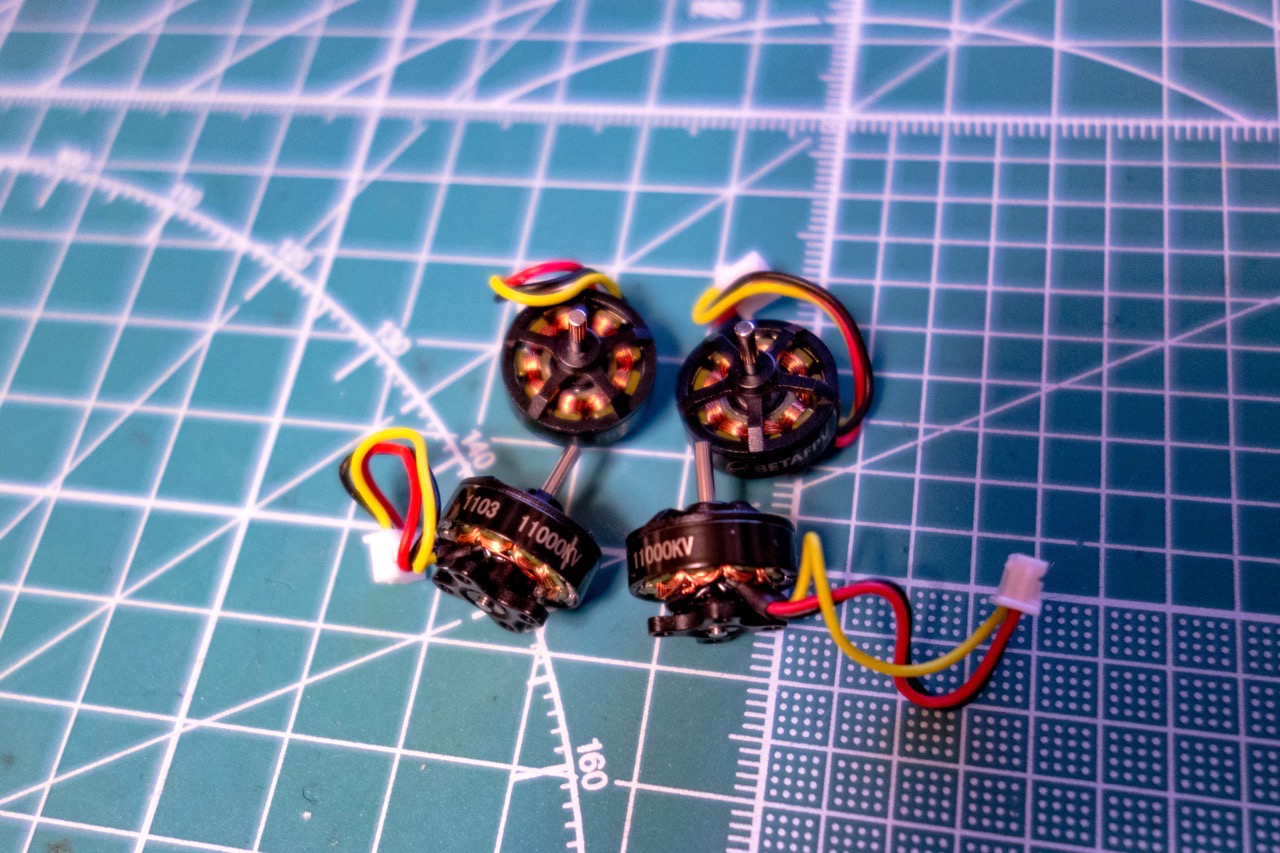
大先輩にD値を下げれば等々ご指導頂いたのですが、その話はちょっと置いといて今回はBeta75Xでも使われている1103(11000KV)モーターに変更して飛びの検証をしてみました。


Beta75 Pro2に1103モーターは最適!?
現在販売されているBeta75 Pro2には標準で08028(12000KV)モーターが使われています。
私が購入時、BETAFPVのサイトで見ていた時は0802(12000KV)という表記がされていたのですが、仕様変更されたようで実際届いたのは08028モーター版でした。

まずは、手元に0802(12000KV)モーターがあったのでこちらに載せ替えて試してみましたが、うぅ〜ん、かなりのパワーダウン!
BETAFPVさんが少し大きな08028モーターに仕様変更したのも納得です!


そして1103モーターへ載せ替え。

どうして1103モーターなのか?
Beta75 Pro2に使われているFCには『F4 2S AIO Brushless Flight Controller』が使われていますが、BETAFPVのサイトに気になる記述がありました。
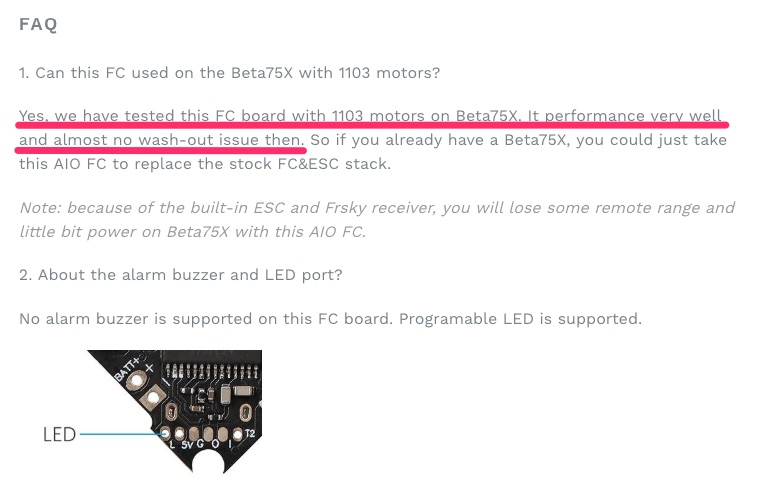
 参考 F4 2S AIO Brushless Flight ControllerBETAFPV
参考 F4 2S AIO Brushless Flight ControllerBETAFPV 非常に気になったので試してみることに!
まず1103モーター使用にあたり、Beta75 Pro2で使われている「Beta75 Pro 2 Frame」ではモーター固定ネジ穴のピッチが合わないため、「Beta75X 2S Whoop Frame」に変更する必要があります。
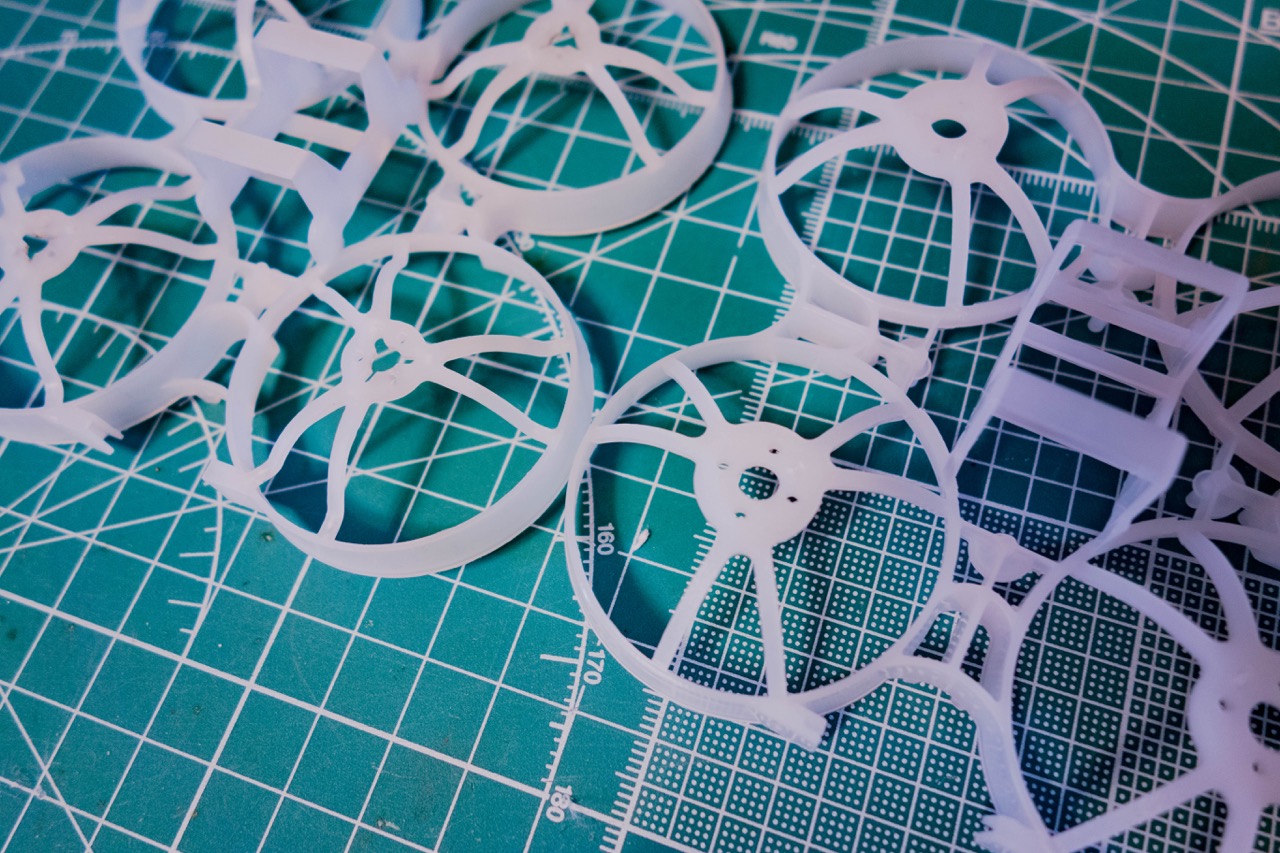

そしてサクッと載せ替えて完成!
デフォルトのBeta75 Pro2からモーター&フレームだけ載せ替えた構成となります。
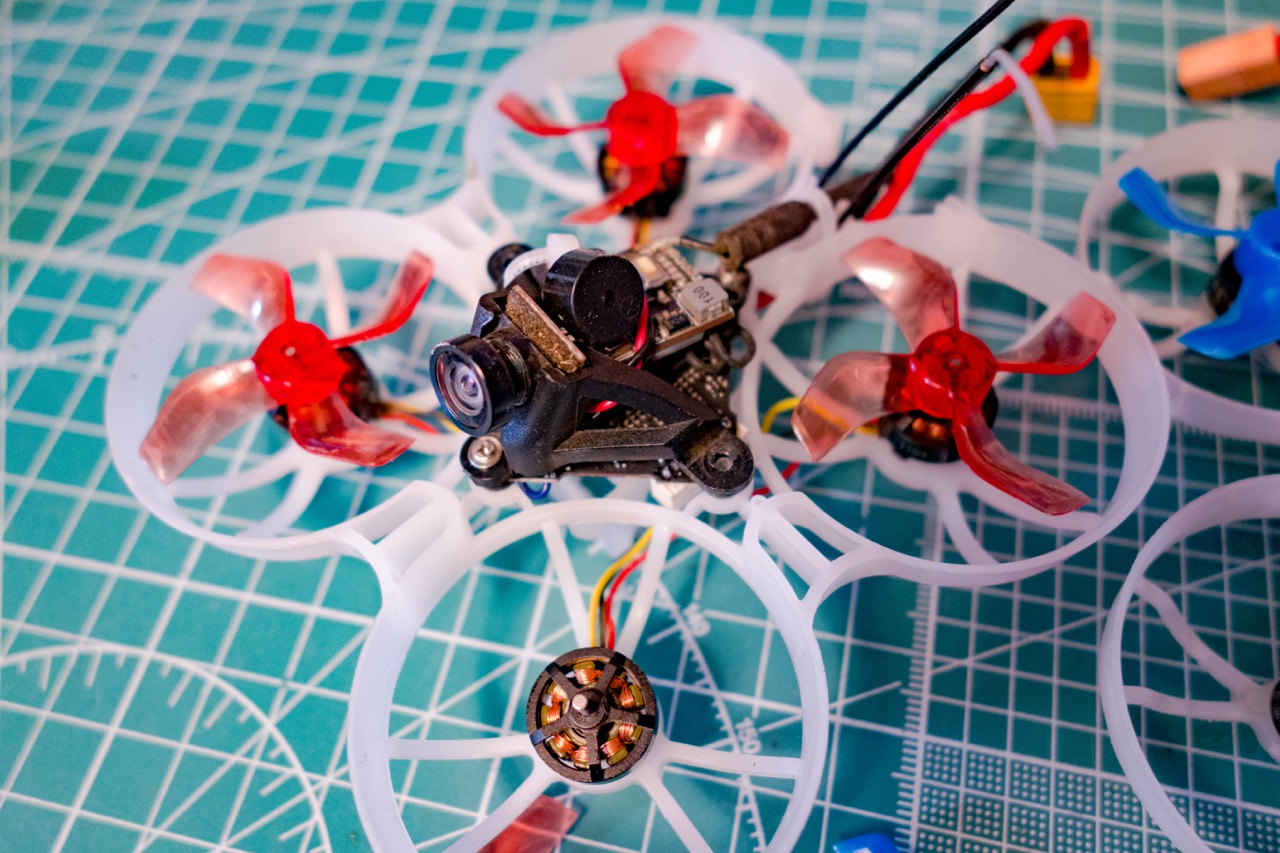

ノーマル状態(xm+受信機搭載)のBeta75 Pro2の重量が約31.5gでした。


モーター&フレーム変更により約10g重量が増加しています。


飛ばし比べてみました!
そして飛ばし比べ!
DVRで撮った動画を見てもらうのが一番わかりやすいのですが、Youtubeとかやってないので口頭でご説明。
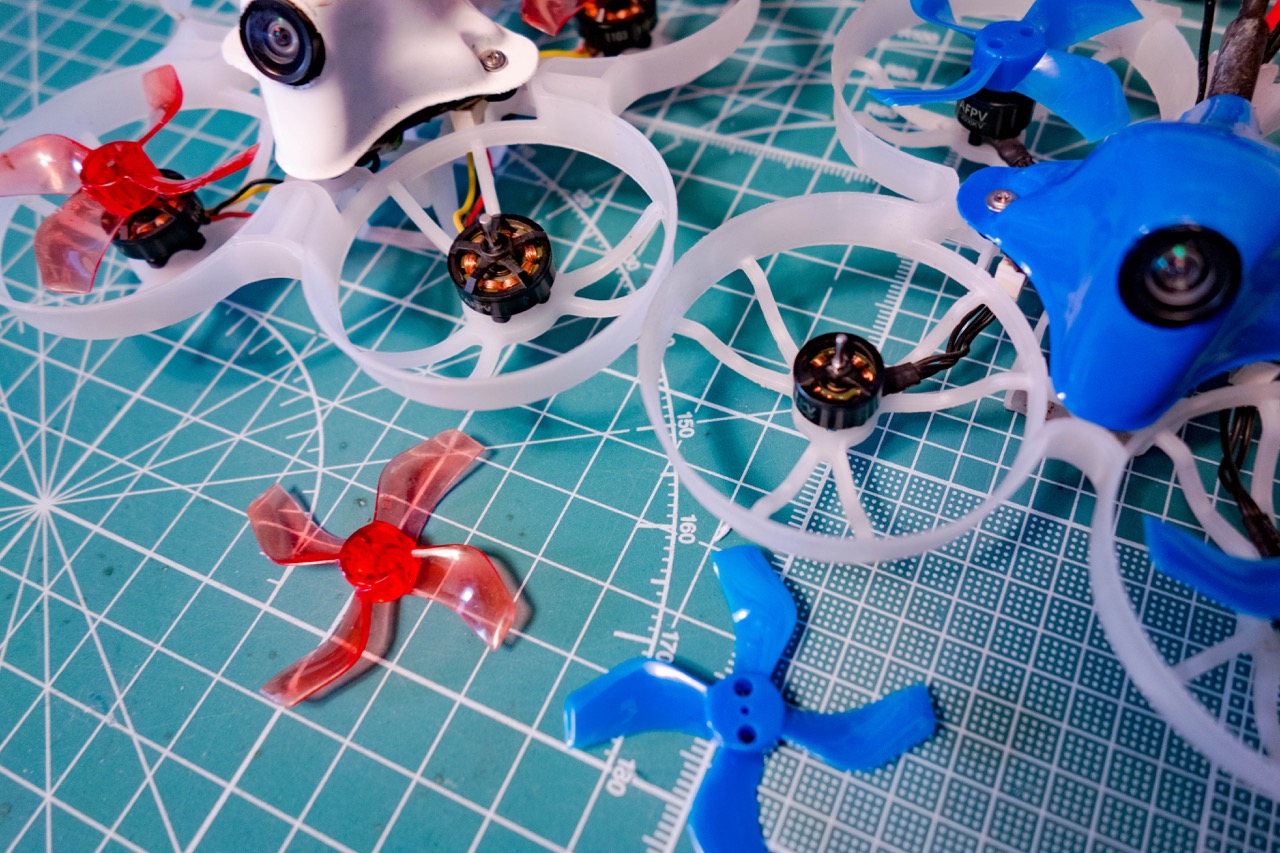
1103モーター&Beta75Xフレームに載せ替えたピンクペラのBeta75 Pro2くんと、08028モーター&Beta75 Pro2フレームのデフォルト状態の青ペラ機。


まずは飛行時間ですが、2セル350mAhバッテリーで野外飛行でデフォルト状態の機体が3分、1103モーター機では4分と飛行時間が1分近くも延びました!
軽量機にある機体のブレ(私の設定不足かな?)も少なく非常に安定感も増しました!
そして飛行後のモーターは、08028機のアツアツ状態から1103モーターではほんのり熱くなる程度。
これはモーターにも優しいのかな?

以前デフォルトの08028モーターで飛ばしていた時、急に飛行中に接続が切れノーコン状態が頻繁に起こるようになり外部受信機を変えてみたりFCを変えたりと・・・
最終的にアーム直後に回転が遅いモーターが1個ありこれが原因だと分かりました。
因果関係ははっきりしませんが、やはりモーターに負担がかかってるんでしょうか?


そして最後にプロップウォッシュについてです。
夜間練習する時は、あまり上空に飛ばす事ができないので外灯があるこのような林間コースで練習しています。
木々をすり抜け、急なターンをする時に機体がガクッと落ち込むプロップウォッシュが多かれ少なかれ発生するのですが、1103モーター変更によりかなり発生が少なくなったように感じられます。



Whoopの形状をしている限りプロップウォッシュの発生は避けられないという話を聞きました。
⌘むうさん@三代目めう子日本涎掛党党員さんの検証&研究は素晴らしく、プロップウォッシュ対策に関してこのような助言をいただきました。
- モーター回転を逆回転に
- Betaflightの基本タブにて「モーターアイドルスロットル値」を7程度まで上げる
- PID設定でD値をモーターが熱くならない程度まで上げる
- 回転速度を700以下に調整する
- Anti Gravity値を2に
- I値ローテーションをON
- Vbat PID補正をON
- I値リラックスをオン・軸をRPにタイプはジャイロ
- ターン時(横の動き時)にウォッシュアウトが感じられたら逆回転に
- ループ時(縦の動き時)に感じられたら正回転にする
今回、Beta75 Pro2くんのモーターが違う構成で2機作成し検証してみましたが、設定等の変更でまた大きく飛びも変わってくるかと思います。
上記助言を参考に、現在いろいろとBeta75 Pro2くんの設定を詰めていますが、なかなか私のスキルがそこまで到達できておらず歯がゆい感じとなっています。
非常に安定して飛ばしやすいBeta75 Pro2くんですが、現在の1103モーターでの構成になり安定感が増し飛ばしやすくなりったのは事実で、構成の一例として参考にしてみて下さい。
【追記】参考にならないと思いますが、動画上げてみました。
またBeta75 Pro2ユーザーの方のご意見もいただけるとありがたいです。


【追記】Beta75 Pro2 85mmフレームテスト!
Beta75 Pro2を85mmフレームに載せ替えたテストもしてみました。

 【Toothpick化】Beta75 Pro2をToothpick化してみた!お手軽2セルToothpick機だけど非常によく飛んでくれます!(完全に2セル版HX100ですね!)
【Toothpick化】Beta75 Pro2をToothpick化してみた!お手軽2セルToothpick機だけど非常によく飛んでくれます!(完全に2セル版HX100ですね!)  【BETAFPV Beta85 Pro2 先行レビュー】1103モーターにアップしたBeta85 Pro2!以前同じ構成で機体を組んで検証した事があるのですが・・・その飛びはいかに!【Shutterbug85】
【BETAFPV Beta85 Pro2 先行レビュー】1103モーターにアップしたBeta85 Pro2!以前同じ構成で機体を組んで検証した事があるのですが・・・その飛びはいかに!【Shutterbug85】  【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!
【BETAFPV】Beta75 Pro2を軽量85mm機に作り変え、その飛びを検証!  【BETAFPV Pro Series】野外ロスト防止にBeta75 Pro2にブザーを取り付ける!
【BETAFPV Pro Series】野外ロスト防止にBeta75 Pro2にブザーを取り付ける!  【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!
【BETAFPV】Beta75 Pro2に2Sバッテリーが使えるようピッグテールをXT30プラグに交換!ケーブルの配置が結構シビアで苦戦!  【BETAFPV】08028モーター&Z02カメラに仕様変更された『Beta75 Pro2』。PNP版ではブザーポートもあり野外飛行でも安心!
【BETAFPV】08028モーター&Z02カメラに仕様変更された『Beta75 Pro2』。PNP版ではブザーポートもあり野外飛行でも安心! 

[…] 【Beta75 Pro2】標準の08028モーターを1103モーターに変更。飛行時間が1分ほど延び飛行も安定、プロップウォッシュも出にくくなるようですね! […]